
Na Unidade anterior, você moveu o Braço Robótico de 6 Eixos para vários pontos de referência, movendo-se ao longo dos eixos x e y, um de cada vez. Em um ambiente de robótica industrial, há muitas situações em que você precisará se mover de forma controlada ao longo de vários eixos simultaneamente.
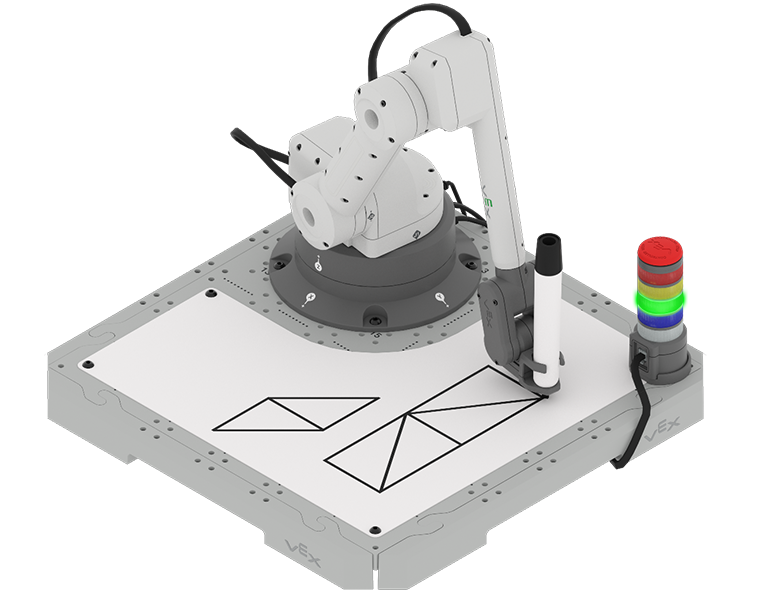
Ao longo da Unidade, você aprenderá a encontrar as coordenadas necessárias para desenhar uma forma específica, construindo sua compreensão de como o Braço de 6 Eixos se move ao longo de vários eixos no espaço 3D. No final da Unidade, você aplicará seu aprendizado para desenhar várias formas no Quadro de Comunicações.
Cocriar Metas de Aprendizagem
Agora que você assistiu ao vídeo, sabe que codificará o Braço de 6 eixos para se mover em vários eixos simultaneamente, a fim de desenhar formas. Primeiro, você aprenderá como o Braço de 6 eixos coordena o movimento ao longo de vários eixos para se mover em um caminho diagonal. Em seguida, você aprenderá a codificar o Braço de 6 Eixos para se mover e desenhar um triângulo. Você desenvolverá essa habilidade para encontrar coordenadas ausentes, de modo que codifique o Braço de 6 Eixos para desenhar os lados ausentes de um quadrado. Você vai juntar tudo isso para desenhar um paralelogramo e um retângulo no final desta Unidade.
Você irá co-criar metas de aprendizagem com o seu grupo e o seu professor para capturar essas metas, para que você tenha uma compreensão compartilhada das suas metas de aprendizagem para a Unidade. Você escreverá suas metas de aprendizagem no seu caderno de engenharia para que possa consultá-las em toda a Unidade.
É útil formular metas de aprendizagem na forma de declarações "Eu posso". Exemplos de metas de aprendizagem para esta Unidade podem incluir:
- Posso usar uma coordenada inicial e os comprimentos dos lados de um triângulo para encontrar as coordenadas ausentes necessárias para desenhar um triângulo.
- Posso codificar o Braço de 6 Eixos para desenhar formas.
- Posso usar Comentários no VEXcode para documentar meu projeto.
Para criar suas metas de aprendizagem, primeiro faça um brainstorming do que você precisa saber para poder concluir as atividades mostradas no vídeo acima. Faça uma lista no seu caderno de engenharia do que você precisará saber, aprender e fazer, assim:
- Calcule uma coordenada ausente de um triângulo usando um ponto de partida e um comprimento lateral.
- Codifique o Braço de 6 Eixos para se mover nos eixos x e y ao mesmo tempo.
- Adicionar um bloco de comentários a um projeto.
- Trabalhar em colaboração com o meu grupo para construir e testar o nosso projeto na atividade.
| Categoria de alvo de aprendizagem | Metas de Aprendizagem |
|---|---|
|
Metas de conhecimento O que preciso de saber e compreender para ter sucesso na Unidade? |
|
|
Metas de raciocínio O que posso fazer com o que sei e compreendo para ter sucesso na Unidade? |
|
|
Alvos de Habilidade O que posso demonstrar para mostrar que compreendo os conceitos e as competências necessárias para ter sucesso na Unidade? |
|
Em seguida, cocrie metas de aprendizagem com base na sua lista. Pense em como cada uma das coisas que você listou pode ser enquadrada em um alvo de aprendizagem, usando as declarações "Eu posso". Você pode usar este modelo para ajudá-lo a escrever suas metas de aprendizagem no seu caderno de engenharia. (Google Doc / .docx / .pdf)
Por exemplo, o item de lista "Calcular uma coordenada ausente de um triângulo usando um ponto inicial e um comprimento lateral" pode ser deslocado para o alvo de aprendizagem de. Posso usar uma coordenada inicial e os comprimentos dos lados de um triângulo para encontrar as coordenadas ausentes necessárias para desenhar um triângulo.
Partilhe os seus objetivos de aprendizagem com o seu professor. Ajuste-os conforme necessário para que você, o seu grupo e o seu professor estejam todos de acordo.
Vocabulário
Nesta Unidade, você aprenderá a codificar o Braço de 6 Eixos para se mover ao longo de vários eixos, para que possa desenhar formas com o Braço de 6 Eixos. Esta lista de vocabulário está aqui para fornecer referência para quaisquer novos termos que você possa encontrar. Grave este vocabulário no seu caderno de engenharia. Use esta lista como referência ao trabalhar na Unidade e encontrar palavras com as quais você pode não estar familiarizado.
- Comentários
- Blocos no VEXcode que são adicionados aos projetos para explicar o que um programador quer que partes do programa façam.
- Waypoint
- Um ponto intermediário entre dois locais em uma linha de deslocamento.
- Movimento Multieixo
- A capacidade do braço robótico de se mover em mais de uma direção ou ao longo de mais de um eixo ao mesmo tempo.
- Triângulo direito
- Um triângulo com um ângulo de 90 º. O lado oposto a este ângulo é o lado mais longo, conhecido como hipotenusa. Os outros dois lados são chamados de pernas.
| Quantidade | Materiais necessários |
|---|---|
| 1 por grupo |
Kit de Célula de Trabalho CTE |
| 1 por grupo |
Computador |
| 1 por grupo |
VEXcode EXP |
| 1 por aluno |
Caderno de Engenharia |
Selecione Avançar > para saber mais sobre como mover o Braço de 6 Eixos em vários eixos.