
Dans l'unité précédente, vous avez déplacé le bras robotique à 6 axes vers divers points de cheminement, en vous déplaçant le long des axes x et y un à la fois. Dans un environnement de robotique industrielle, il existe de nombreuses situations dans lesquelles vous devrez vous déplacer de manière contrôlée le long de plusieurs axes simultanément.
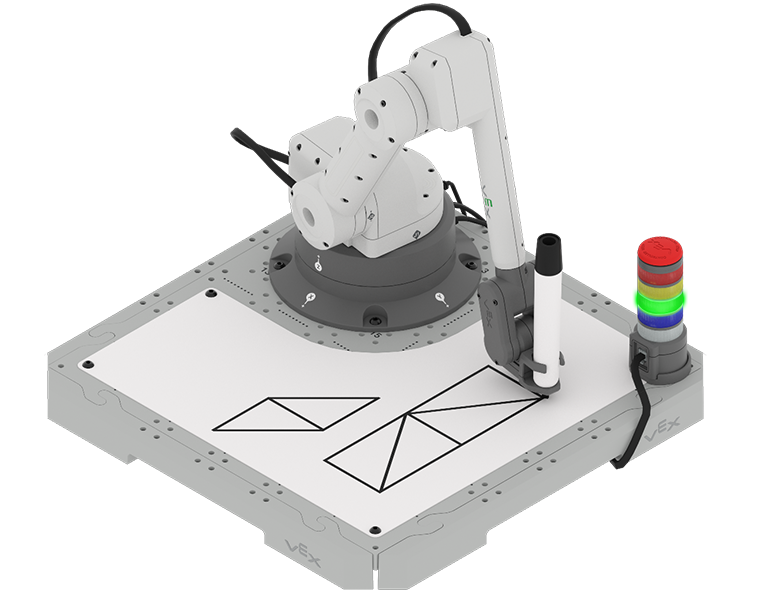
Tout au long de l'unité, vous apprendrez à trouver les coordonnées nécessaires pour dessiner une forme spécifique, en développant votre compréhension de la façon dont le bras à 6 axes se déplace le long de plusieurs axes dans l'espace 3D. À la fin de l'unité, vous appliquerez votre apprentissage pour dessiner plusieurs formes sur le tableau blanc.
Co-créer des cibles d'apprentissage
Maintenant que vous avez regardé la vidéo, vous savez que vous allez coder le bras à 6 axes pour qu'il se déplace sur plusieurs axes simultanément afin de dessiner des formes. Tout d'abord, vous apprendrez comment le bras à 6 axes coordonne le mouvement le long de plusieurs axes pour se déplacer en diagonale. Ensuite, vous apprendrez à coder le bras à 6 axes pour vous déplacer et dessiner un triangle. Vous utiliserez cette compétence pour trouver les coordonnées manquantes, afin de coder le bras à 6 axes pour dessiner les côtés manquants d'un carré. Vous allez rassembler tout cela pour dessiner un parallélogramme et un rectangle à la fin de cette unité.
Vous co-créerez des objectifs d'apprentissage avec votre groupe et votre enseignant pour saisir ces objectifs, afin d'avoir une compréhension commune de vos objectifs d'apprentissage pour l'unité. Vous écrirez vos objectifs d'apprentissage dans votre cahier d'ingénierie afin que vous puissiez vous y référer dans toute l'unité.
Il est utile de formuler les objectifs d'apprentissage sous la forme d'énoncés « Je peux ». Voici quelques exemples d'objectifs d'apprentissage pour cette unité :
- Je peux utiliser une coordonnée de départ et les longueurs des côtés d'un triangle pour trouver les coordonnées manquantes nécessaires pour dessiner un triangle.
- Je peux coder le bras à 6 axes pour dessiner des formes.
- Je peux utiliser les commentaires dans VEXcode pour documenter mon projet.
Pour créer vos objectifs d'apprentissage, commencez par réfléchir à ce que vous devez savoir pour pouvoir terminer les activités présentées dans la vidéo ci-dessus. Faites une liste dans votre cahier d'ingénierie de ce que vous devrez savoir, apprendre et faire, comme ceci :
- Calculez une coordonnée manquante d'un triangle à l'aide d'un point de départ et d'une longueur latérale.
- Codez le bras à 6 axes pour qu'il se déplace dans les axes x et y en même temps.
- Ajoutez un bloc de commentaires à un projet.
- Travailler en collaboration avec mon groupe pour construire et tester notre projet dans l'activité.
| Catégorie d'objectifs d'apprentissage | Objectifs d'apprentissage |
|---|---|
|
Objectifs de connaissances Que dois-je savoir et comprendre pour réussir dans l'unité ? |
|
|
Objectifs de raisonnement Que puis-je faire avec ce que je sais et comprends pour réussir dans l'unité ? |
|
|
Objectifs de compétences Que puis-je démontrer pour montrer que je comprends les concepts et les compétences nécessaires pour réussir dans l'unité ? |
|
Ensuite, co-créez des objectifs d'apprentissage en fonction de votre liste. Réfléchissez à la façon dont chacune des choses que vous avez énumérées peut être encadrée dans une cible d'apprentissage, en utilisant des énoncés « Je peux ». Vous pouvez utiliser ce modèle pour vous aider à écrire vos objectifs d'apprentissage dans votre cahier d'ingénierie. (Google Doc / .docx / .pdf)
Par exemple, l'élément de liste « Calculer une coordonnée manquante d'un triangle à l'aide d'un point de départ et d'une longueur latérale » peut être déplacé vers la cible d'apprentissage de Je peux utiliser une coordonnée de départ et les longueurs des côtés d'un triangle pour trouver les coordonnées manquantes nécessaires pour dessiner un triangle.
Partagez vos objectifs d'apprentissage avec votre professeur. Ajustez-les au besoin afin que vous, votre groupe et votre enseignant soyez tous d'accord.
Vocabulaire
Dans cette unité, vous apprendrez à coder le bras à 6 axes pour qu'il se déplace le long de plusieurs axes, afin que vous puissiez dessiner des formes avec le bras à 6 axes. Cette liste de vocabulaire est ici pour fournir une référence pour tous les nouveaux termes que vous pourriez rencontrer. Enregistrez ce vocabulaire dans votre cahier d'ingénierie. Utilisez cette liste comme référence lorsque vous travaillez dans l'unité et rencontrez des mots que vous ne connaissez peut-être pas.
- Commentaires
- Blocs dans VEXcode qui sont ajoutés aux projets pour expliquer ce qu'un programmeur veut que certaines parties du programme fassent.
- Point de cheminement
- Un point intermédiaire entre deux emplacements sur une ligne de déplacement.
- Mouvement multi-axes
- La capacité du bras robotique à se déplacer dans plus d'une direction ou le long de plus d'un axe en même temps.
- Triangle droit
- Un triangle avec un angle de 90 °. Le côté opposé à cet angle est le côté le plus long, appelé hypoténuse. Les deux autres côtés sont appelés les jambes.
| Quantité | Matériel nécessaire |
|---|---|
| 1 par groupe |
Kit de cellule de travail CTE |
| 1 par groupe |
Ordinateur |
| 1 par groupe |
EXP VEXCODE |
| 1 par élève |
Carnet d'ingénierie |
Sélectionnez Suivant > pour en savoir plus sur le déplacement du bras à 6 axes sur plusieurs axes.