
في هذا الدرس، ستتعرف على نظام الإحداثيات الديكارتية المستخدم مع الذراع الروبوتية ذات 6 محاور.
في نهاية هذا الدرس، ستستخدم فهمك لنظام الإحداثيات الديكارتية وعلاقته بذراع 6 محاور لتقدير إحداثيات ثلاثة مواقع لبلاط CTE.
نظام الإحداثيات الديكارتية
من أجل تحريك الذراع سداسي المحاور في الفضاء، نحتاج إلى إطار مرجعي مشترك حتى يتمكن الذراع سداسي المحاور من الانتقال إلى الموقع المطلوب. يستخدم ذراع 6 محاور نظام الإحداثيات الديكارتية من أجل تحديد مكان نهاية ذراع 6 محاور.
المحاور X وY وZ
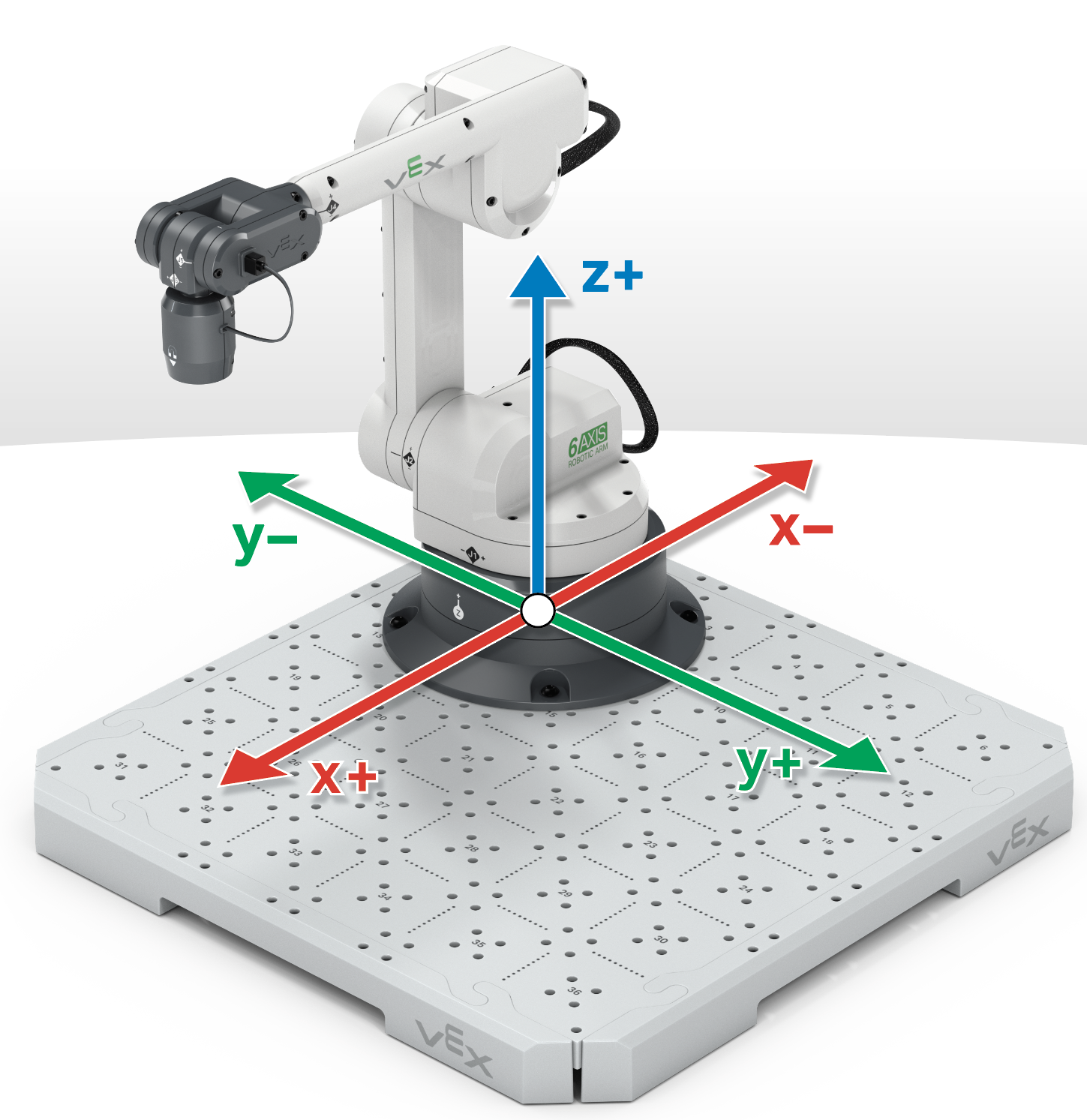
نظام الإحداثيات هو شبكة رياضية من القيم. هناك أنواع مختلفة من أنظمة الإحداثيات، ولكن يتم استخدام نظام الإحداثيات الديكارتية مع ذراع 6 محاور. يُعرف هذا أيضًا باسم نظام ثلاثي الأبعاد (Dimensional)، نظرًا لأن أبعاده الثلاثة هي المحاور x و y و z.
يمكن توضيح المحور السيني عن طريق تحريك الذراع سداسي المحاور نحو القاعدة (المسحوبة) وبعيدًا عن القاعدة (الممتدة).
يمكن توضيح المحور الصادي عن طريق تحريك الذراع سداسي المحاور إلى يسار ويمين القاعدة.
يمكن إظهار المحور z عن طريق تحريك الذراع سداسي المحاور لأسفل نحو البلاط ثم لأعلى بعيدًا عن البلاط.
تقدير الإحداثيات
يتم تحديد الإحداثي (x، y، z) بالمسافة من الإحداثي (0، 0، 0)، ويسمى أيضًا الأصل، إلى نهاية ذراع 6 محاور، ويسمى نقطة مركز الأدوات (TCP).
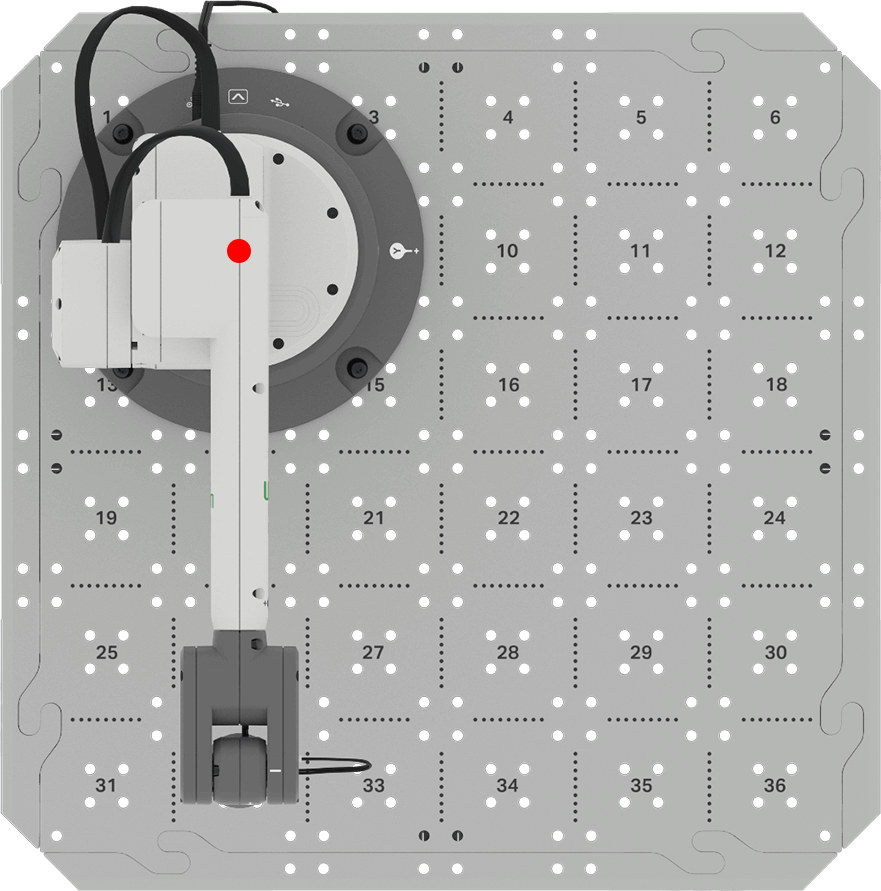
الأصل أو (0، 0، 0) هو الموقع الذي تبدأ منه جميع القيم. يقع (0، 0، 0) على ذراع 6 محاور في وسط القاعدة.
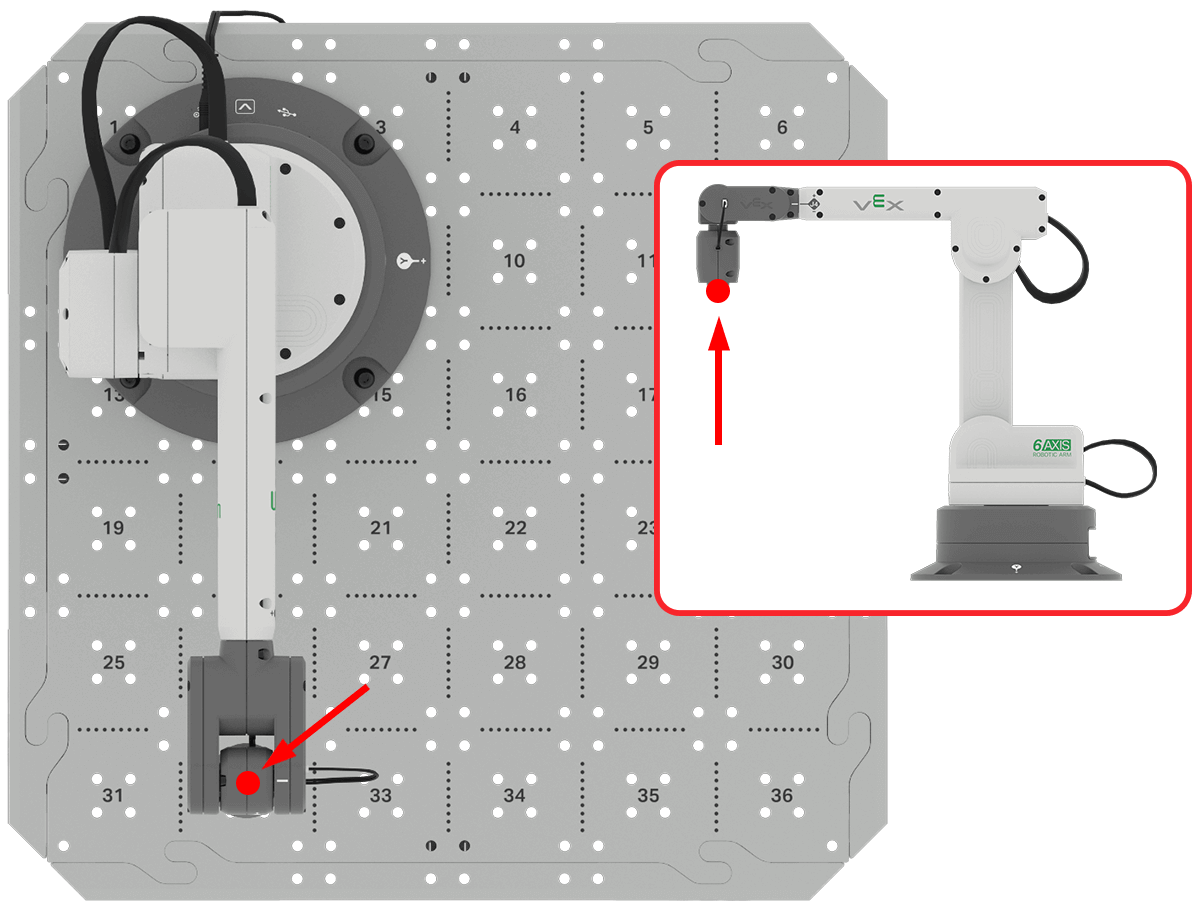
تُعرف نهاية الذراع المكون من 6 محاور باسم نقطة مركز الأدوات (TCP).
بالنسبة للذراع المكون من 6 محاور في هذه الصورة، يكون TCP في نهاية أداة التقاط المغناطيس.
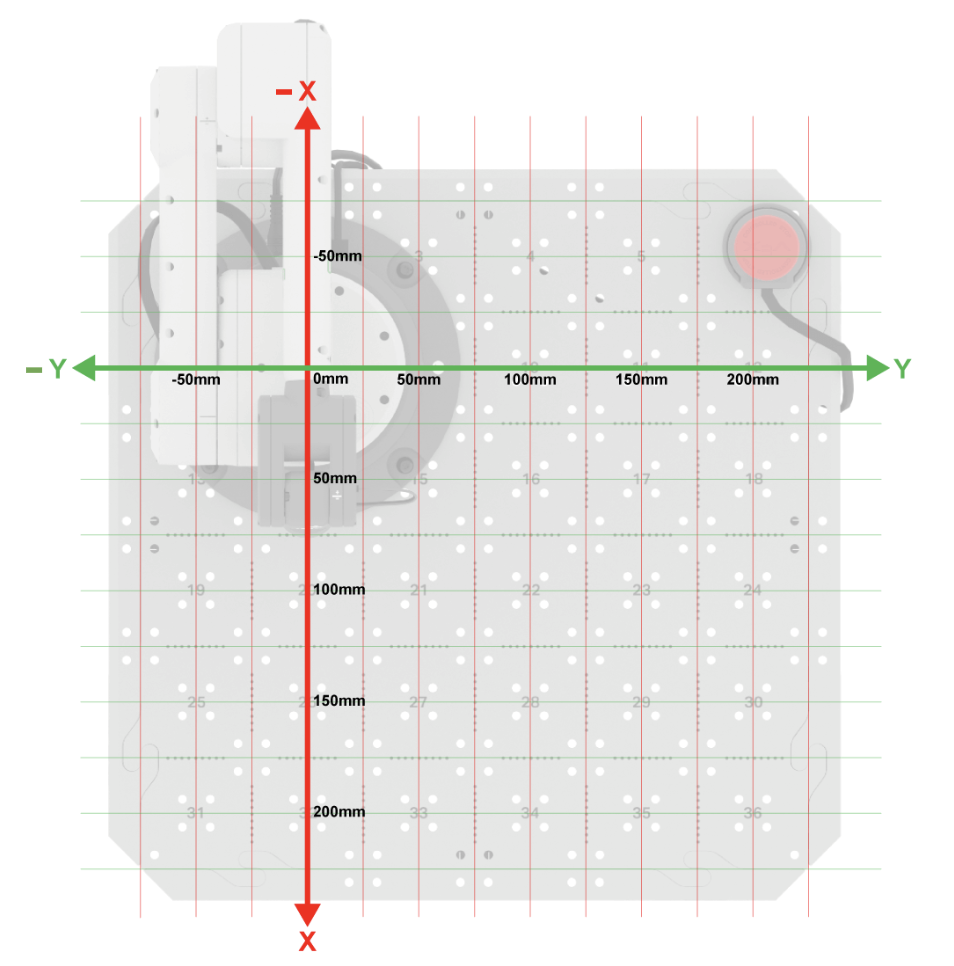
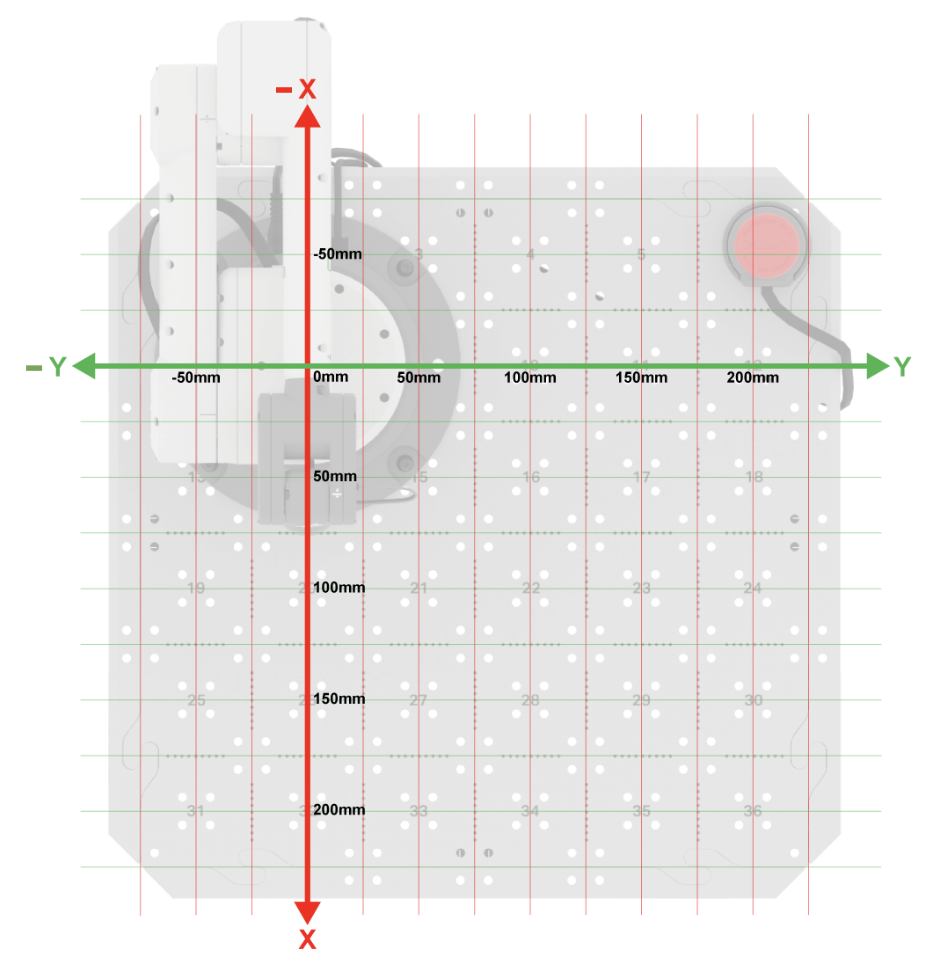
يمكنك استخدام الصورة هنا للمساعدة في تحديد إحداثيات x و y للذراع المكون من 6 محاور. سيظهر المحور z في الشبكة التالية.
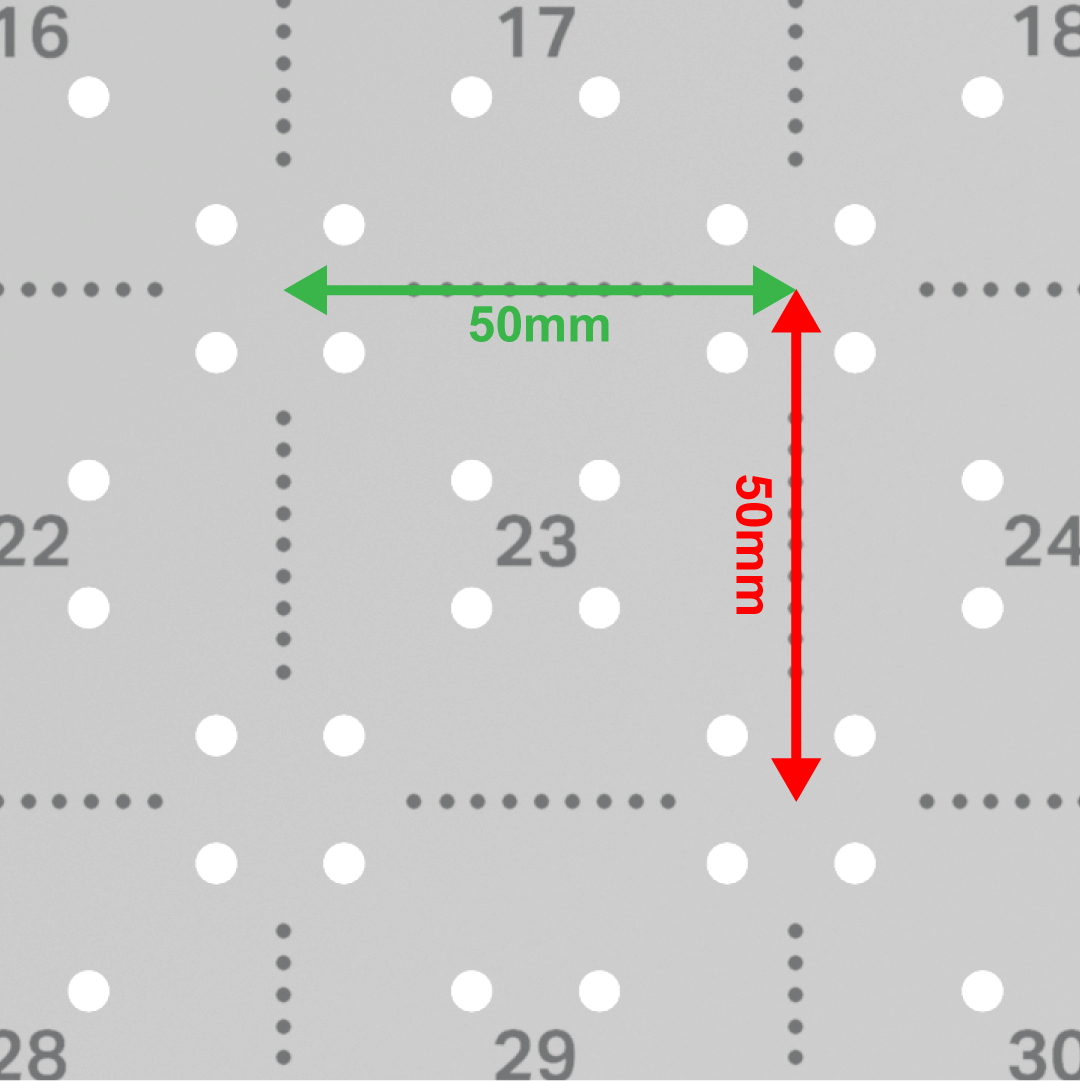
قياس كل مربع من المربعات الفردية على البلاط هو 50 مم × 50 مم.
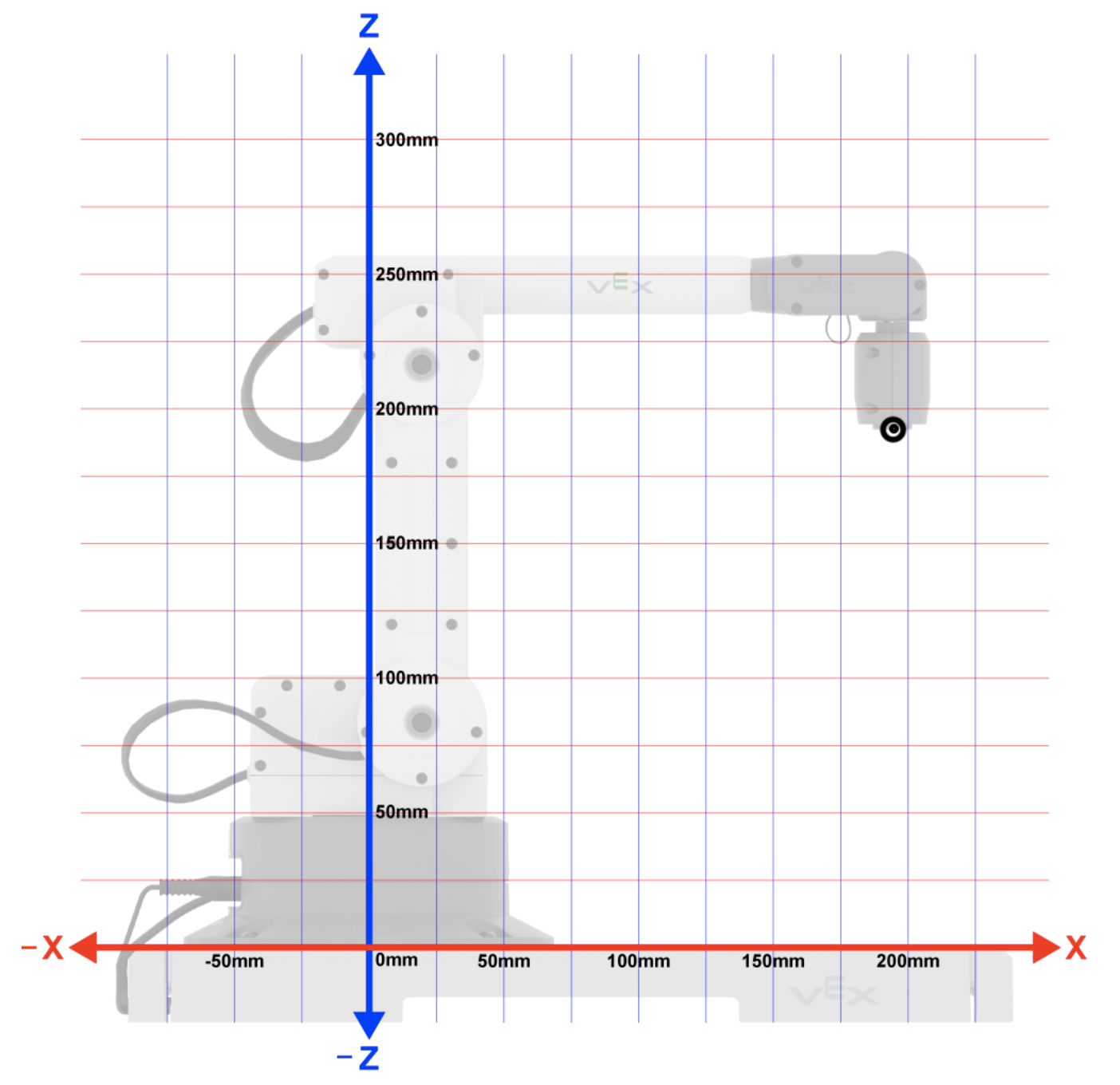
يمكن جمع قيمة المحور z عن طريق تحديد المسافة من البلاط إلى TCP.
في هذا المثال، يمكن تقدير القيمة z لـ TCP بأقل من 200 مم باستخدام شبكة الإحداثيات.
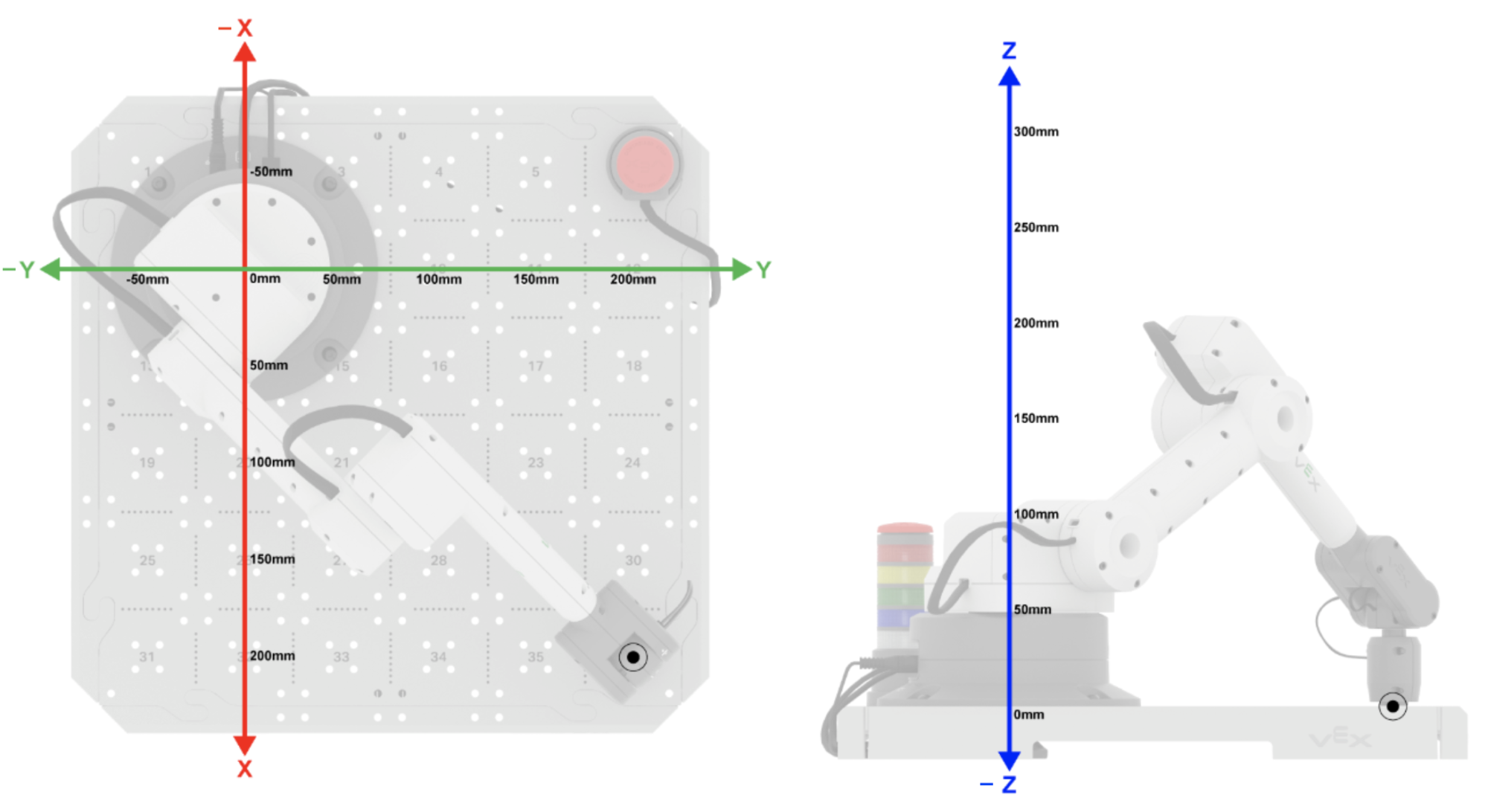
يتم تحديد الإحداثي (x، y، z) بالمسافة (بالملليمتر) من الأصل إلى TCP على طول المحاور الثلاثة.
في هذا المثال، سيكون الإحداثي (x، y، z) (200، 200، 0) لأن TCP هو 200 مم من الأصل في المحور x، و 200 مم من الأصل في المحور y، و 0 مم من الأصل في المحور z.
النشاط
ناقشنا سابقًا في هذا الدرس نظام الإحداثيات الديكارتية وكيفية تحديد الإحداثيات بناءً على المسافة من الأصل إلى TCP. في هذا النشاط، ستحدد إحداثيات ثلاثة مواقع للبلاط.
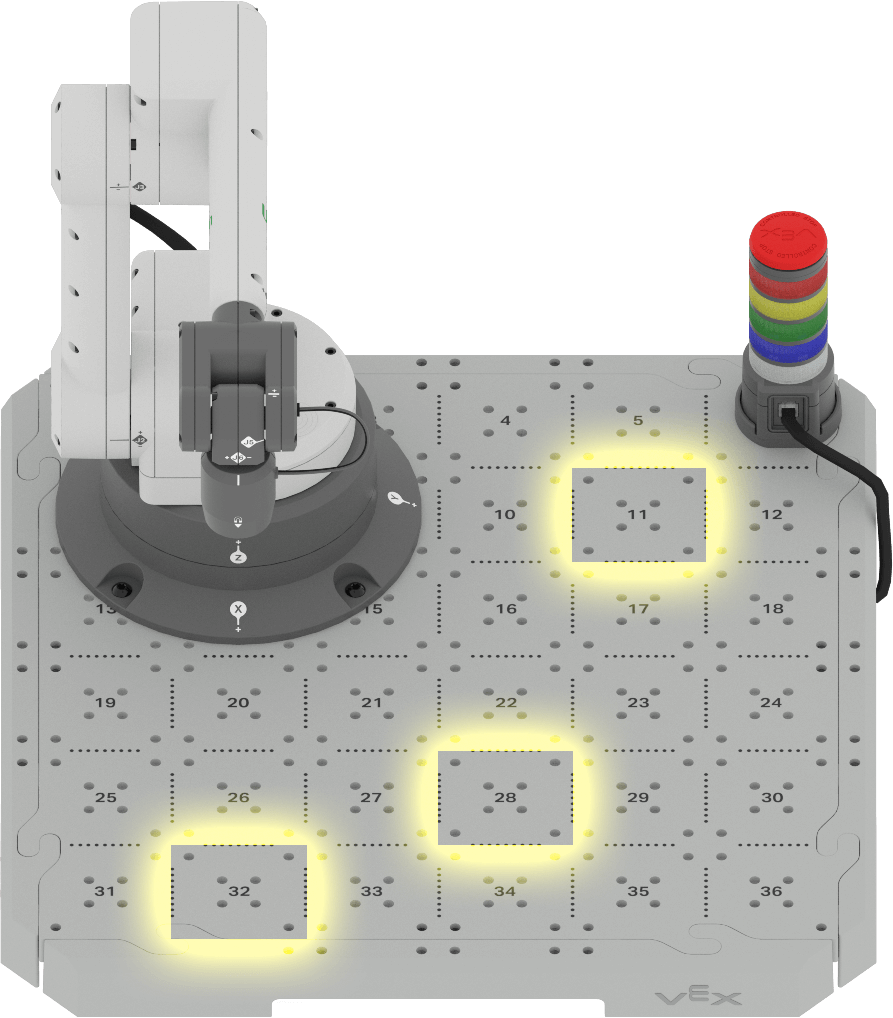
- قم بتقدير إحداثيات (x، y، z) لمواقع البلاط التالية. افترض أن الذراع المكون من 6
محاور يلمس كل موقع من مواقع البلاط وأن الإحداثي z هو 0 مم.
- موقع البلاط 11
- موقع البلاط 32
- موقع البلاط 28
- سجل هذه الإحداثيات في دفتر ملاحظاتك الهندسية. اشرح كيف حددت كل إحداثية.
تحقق من فهمك
قبل البدء في الدرس التالي، تأكد من فهمك للمفاهيم التي يغطيها هذا الدرس من خلال الإجابة على الأسئلة الواردة في المستند أدناه في دفترك الهندسي.
تحقق من فهمك للأسئلة > (Google Doc / .docx / .pdf)
حدد التالي > لمعرفة كيفية جمع الإحداثيات باستخدام الحركات اليدوية.