
3과: 6축 팔의 좌표계
이번 수업에서는 6축 로봇 팔에 사용되는 데카르트 좌표계에 대해 알아봅니다.
이 수업을 마치면 데카르트 좌표계와 6축 암과의 관계에 대한 이해를 바탕으로 세 개의 CTE 타일 위치의 좌표를 추정하게 됩니다.

데카르트 좌표계
6축 팔을 공간에서 움직이려면 6축 팔이 원하는 위치로 이동할 수 있도록 공통된 기준 프레임이 필요합니다. 6축 암은 데카르트 좌표계를 사용하여 6축 암의 끝이 어디에 있는지 확인합니다.
X, Y, Z축
좌표계는 값의 수학적 격자입니다. 좌표계에는 여러 종류가 있지만, 6축 암에서는 데카르트 좌표계를 사용합니다. 이는 x, y, z축의 세 차원을 가지므로 3D(차원) 시스템이라고도 합니다.

이 애니메이션에서 보여지는 것처럼 6축 암을 바닥 쪽으로(수축) 움직이고 바닥에서 멀어지는 방향으로(확장) 움직이면 x축을 확인할 수 있습니다.
이 애니메이션에서 보여지는 것처럼 6축 암을 바닥의 좌우로 움직여서 y축을 보여줄 수 있습니다.
이 애니메이션에서 보여지는 것처럼, 6축 암을 타일 쪽으로 아래로 이동한 다음 타일에서 멀어지는 쪽으로 위로 이동하면 z축을 시연할 수 있습니다.
좌표 추정
(x, y, z) 좌표는 원점이라고도 하는 (0, 0, 0) 좌표에서 도구 중심점(TCP)이라고 하는 6축 암의 끝까지의 거리에 따라 결정됩니다.
원점 또는 (0, 0, 0)은 모든 값이 시작하는 위치입니다. 6축 암의 (0, 0, 0)은 베이스의 중앙에 위치합니다.
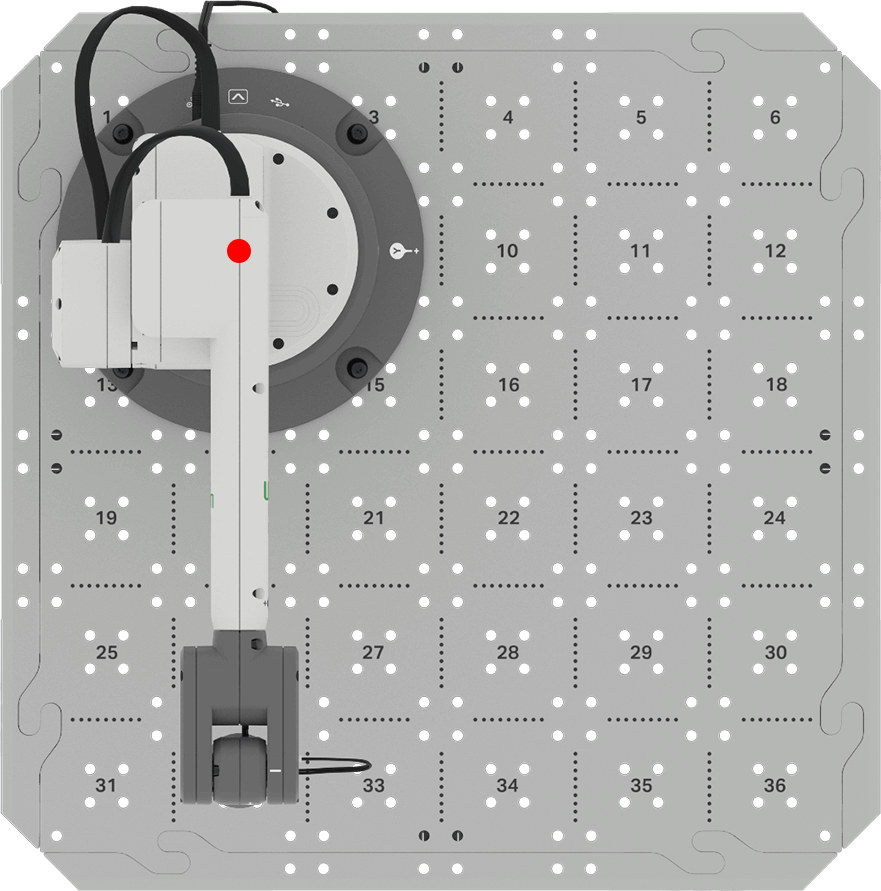
6축 암의 끝은 TCP(Tool Center Point)라고 합니다.
이 이미지의 6축 암의 경우 TCP는 자석 픽업 도구의 끝에 있습니다.
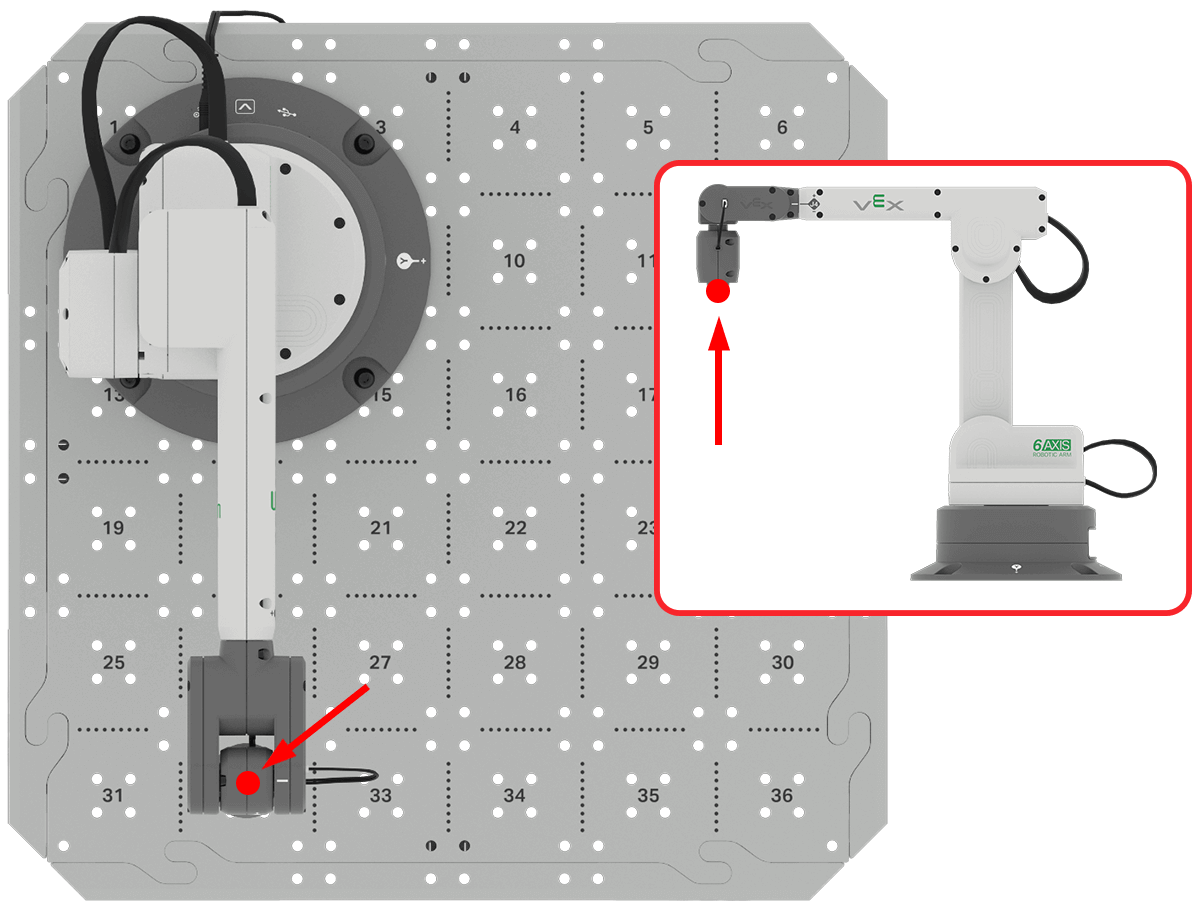
여기 이미지를 사용하면 6축 암의 x, y 좌표를 결정하는 데 도움이 됩니다. z축은 다음 그리드에 표시됩니다.

타일의 각 사각형의 크기는 50mm x 50mm입니다.
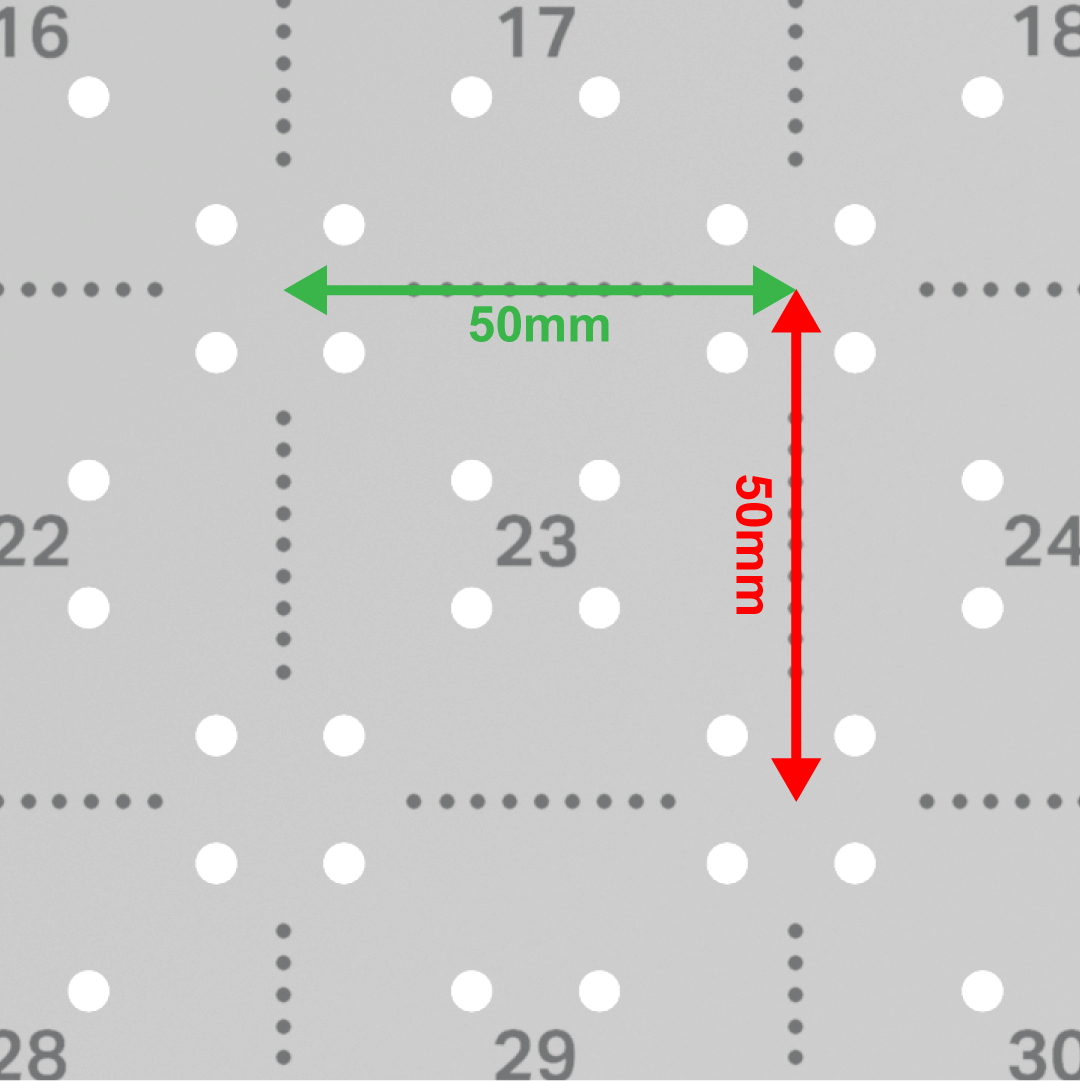
타일에서 TCP까지의 거리를 확인하여 z축 값을 수집할 수 있습니다.
이 예에서 TCP의 z값은 좌표 격자를 사용하여 200mm 미만으로 추정할 수 있습니다.

(x, y, z) 좌표는 세 축을 따라 원점에서 TCP까지의 거리(밀리미터)에 의해 결정됩니다.
이 예에서 (x, y, z) 좌표는 (200, 200, 0)이 됩니다. 왜냐하면 TCP가 x축의 원점에서 200mm, y축의 원점에서 200mm, z축의 원점에서 0mm 떨어져 있기 때문입니다.

활동
이 수업의 이전 단계에서는 데카르트 좌표계와 원점에서 TCP까지의 거리를 기반으로 좌표를 결정하는 방법에 대해 설명했습니다. 이 활동에서는 세 개의 타일 위치의 좌표를 결정합니다.
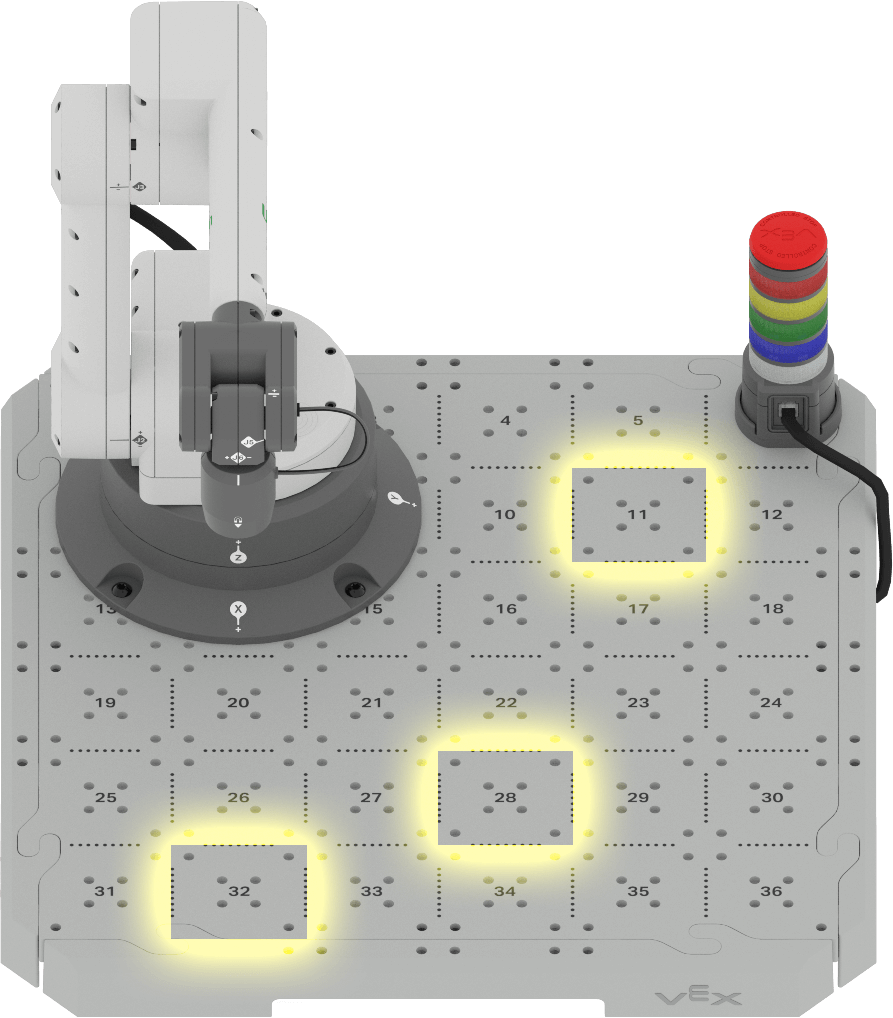
- 다음 타일 위치의 (x, y, z) 좌표를 추정해 보세요. 6축 암이 각 타일 위치에 닿아 있고 z좌표가 0mm라고 가정합니다.
- 타일 위치 11
- 타일 위치 32
- 타일 위치 28
- 이 좌표를 엔지니어링 노트북에 기록하세요. 각 좌표를 어떻게 결정했는지 설명하세요.
이해도 확인
다음 수업을 시작하기 전에 엔지니어링 노트북에서 아래 문서의 질문에 답하여 이 수업에서 다룬 개념을 이해했는지 확인하세요.
이해도 확인 질문 > (Google Doc / .docx / .pdf)
다음 > 선택하여 수동 이동을 사용하여 좌표를 수집하는 방법을 알아보세요.