
Dans cette leçon, vous en apprendrez plus sur le système de coordonnées cartésiennes utilisé avec le bras robotique à 6 axes.
À la fin de cette leçon, vous utiliserez votre compréhension du système de coordonnées cartésiennes et de sa relation avec le bras à 6 axes pour estimer les coordonnées de trois emplacements de tuiles CTE.
Système de coordonnées cartésiennes
Afin de déplacer le bras à 6 axes dans l'espace, nous devons avoir un cadre de référence commun afin que le bras à 6 axes puisse se déplacer à l'emplacement souhaité. Le bras à 6 axes utilise le système de coordonnées cartésiennes afin de déterminer où se trouve l'extrémité du bras à 6 axes.
Axes X, Y et Z
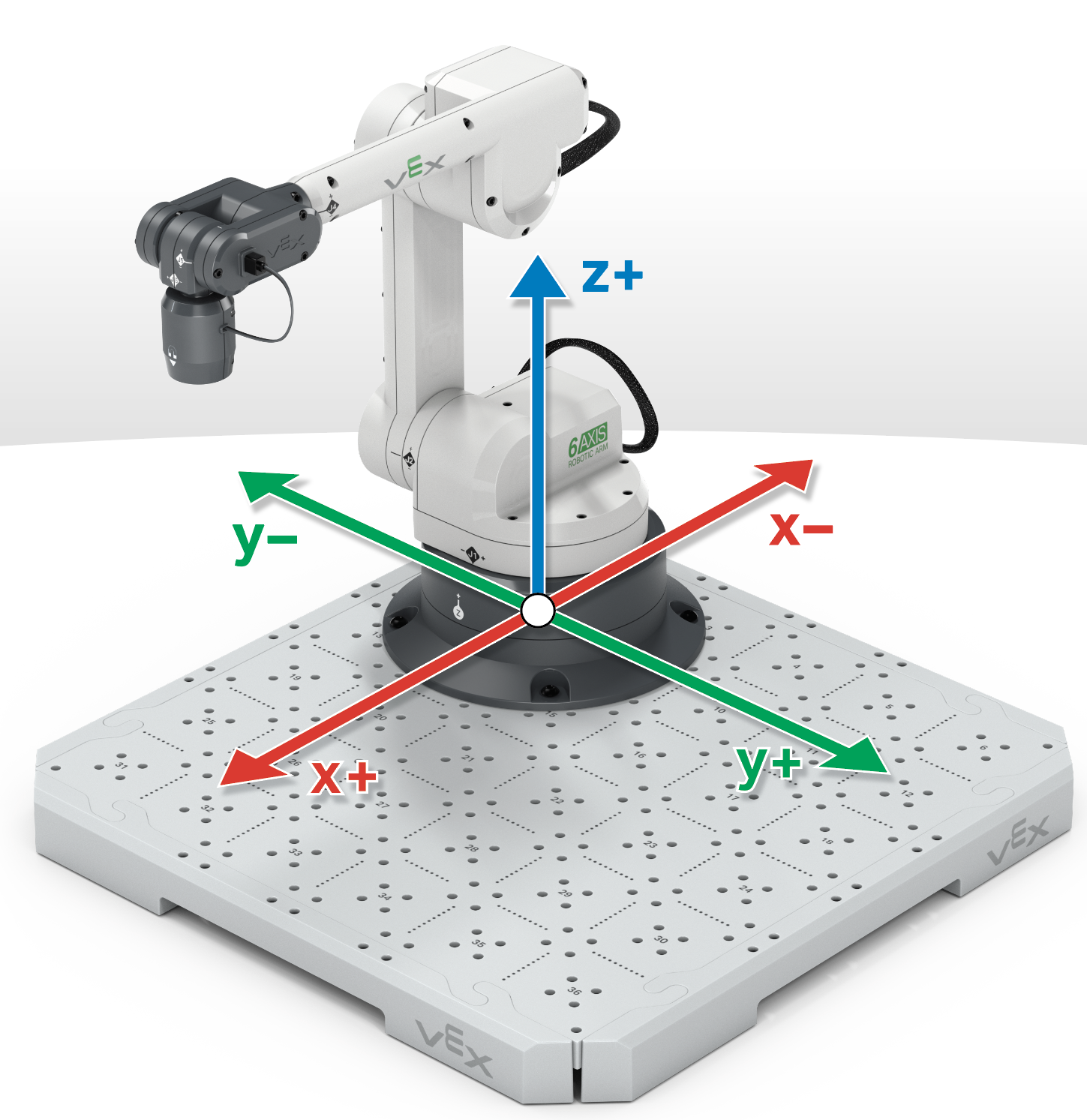
Un système de coordonnées est une grille mathématique de valeurs. Il existe différents types de systèmes de coordonnées, mais le système de coordonnées cartésien est utilisé avec le bras à 6 axes. Ceci est également connu sous le nom de système 3D (dimensionnel), car ses trois dimensions sont les axes x, y et z.
L'axe des abscisses peut être démontré en déplaçant le bras à 6 axes vers la base (rétracté) et loin de la base (étendu).
L'axe y peut être démontré en déplaçant le bras à 6 axes à gauche et à droite de la base.
L'axe z peut être démontré en déplaçant le bras à 6 axes vers le bas en direction de la tuile puis vers le haut en s'éloignant de la tuile.
Estimation des coordonnées
La coordonnée (x, y, z) est déterminée par la distance entre la coordonnée (0, 0, 0), également appelée origine, et l'extrémité du bras à 6 axes, appelée point central de l'outil (TCP).
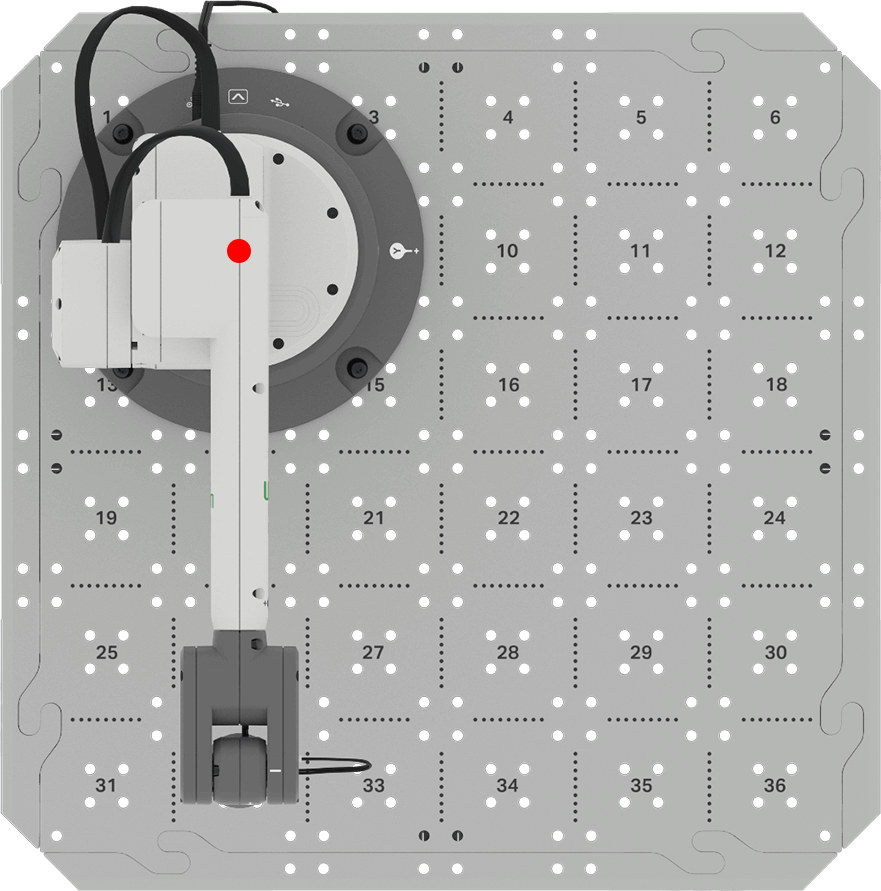
L'origine ou (0, 0, 0) est l'emplacement à partir duquel toutes les valeurs commencent. Le (0, 0, 0) sur le bras à 6 axes est situé au centre de la base.
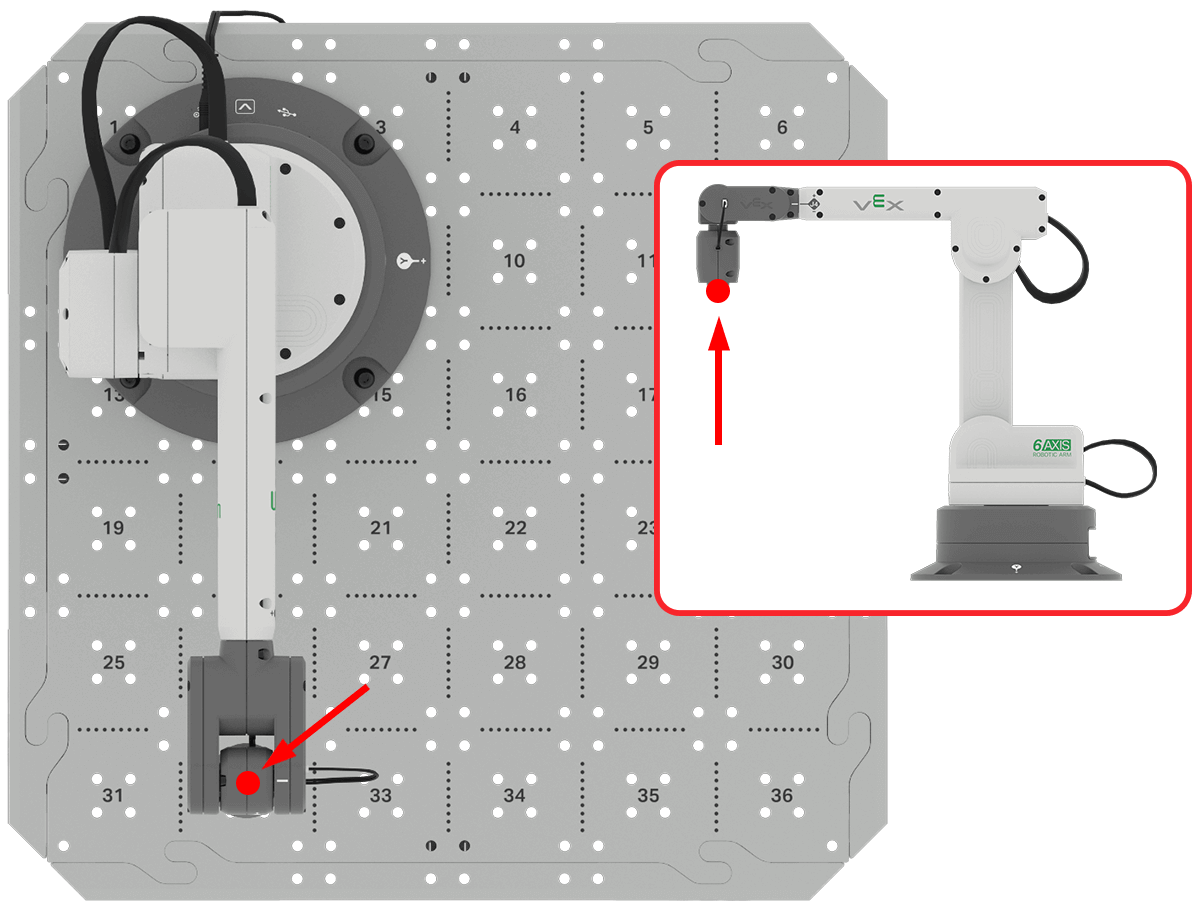
L'extrémité du bras à 6 axes est connue sous le nom de point central de l'outil (TCP).
Pour le bras à 6 axes de cette image, le TCP se trouve à la fin de l'outil de ramassage d'aimants.
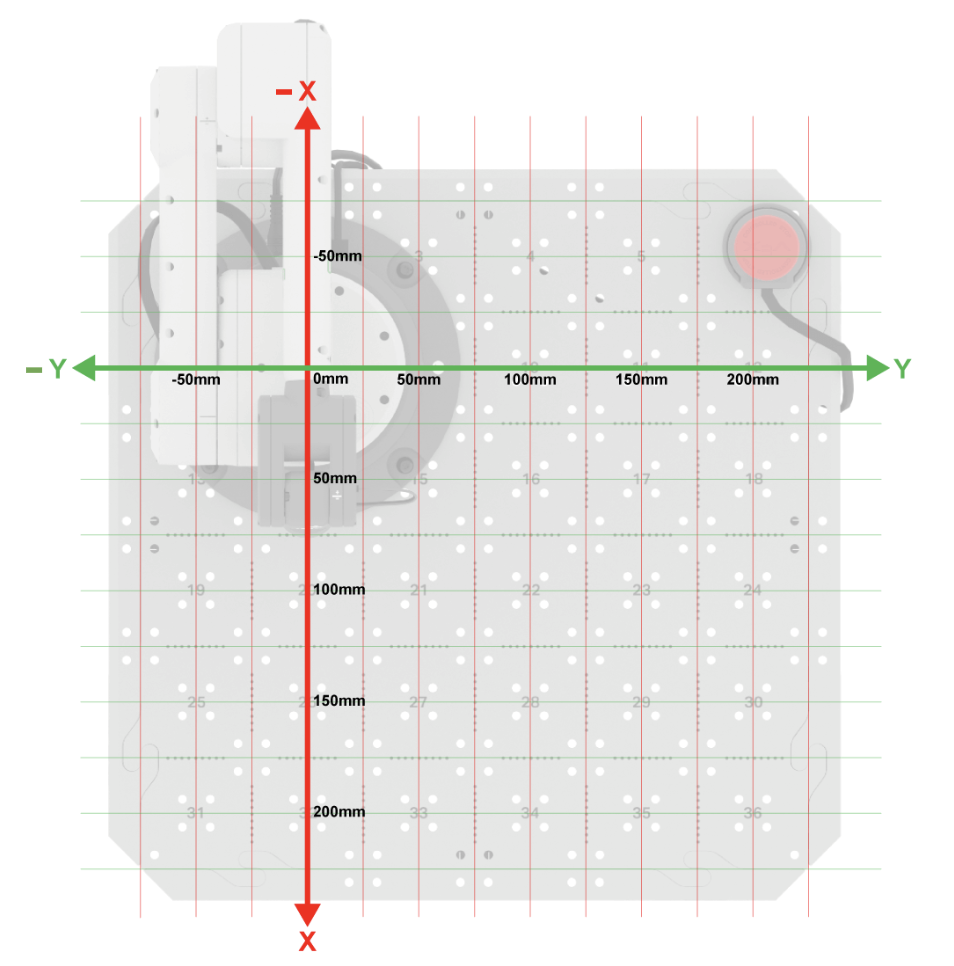
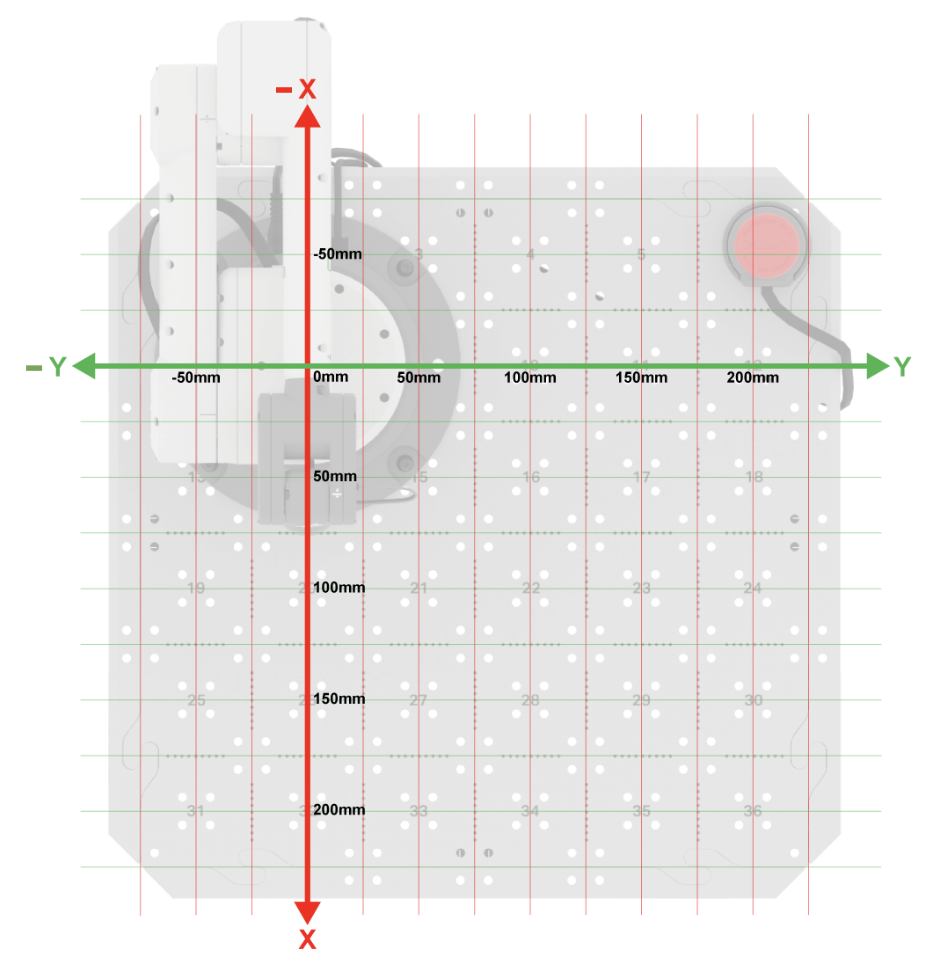
Vous pouvez utiliser l'image ici pour aider à déterminer les coordonnées x, y du bras à 6 axes. L'axe z sera représenté dans une grille suivante.
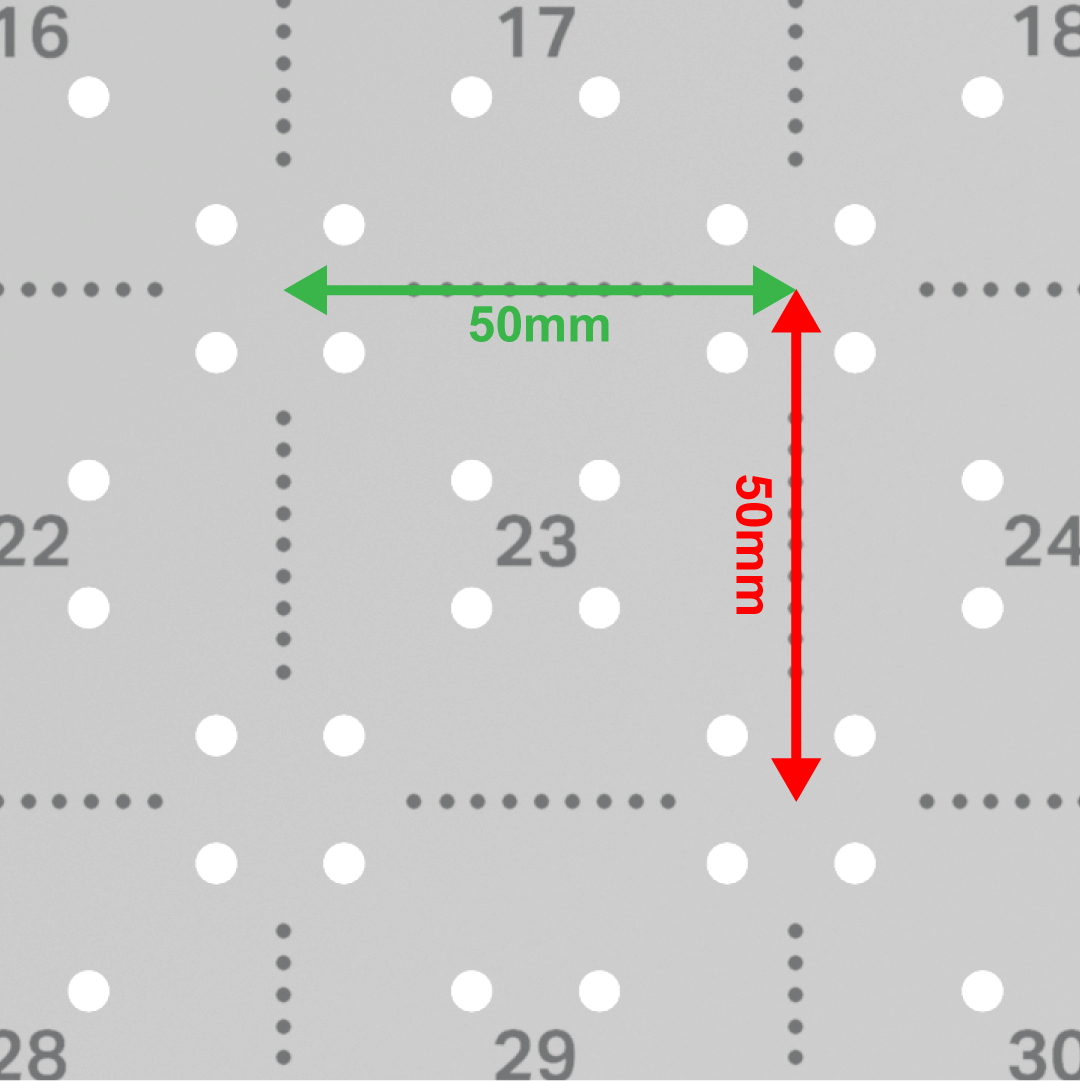
La mesure de chacun des carrés individuels sur la tuile est de 50 mm par 50 mm.
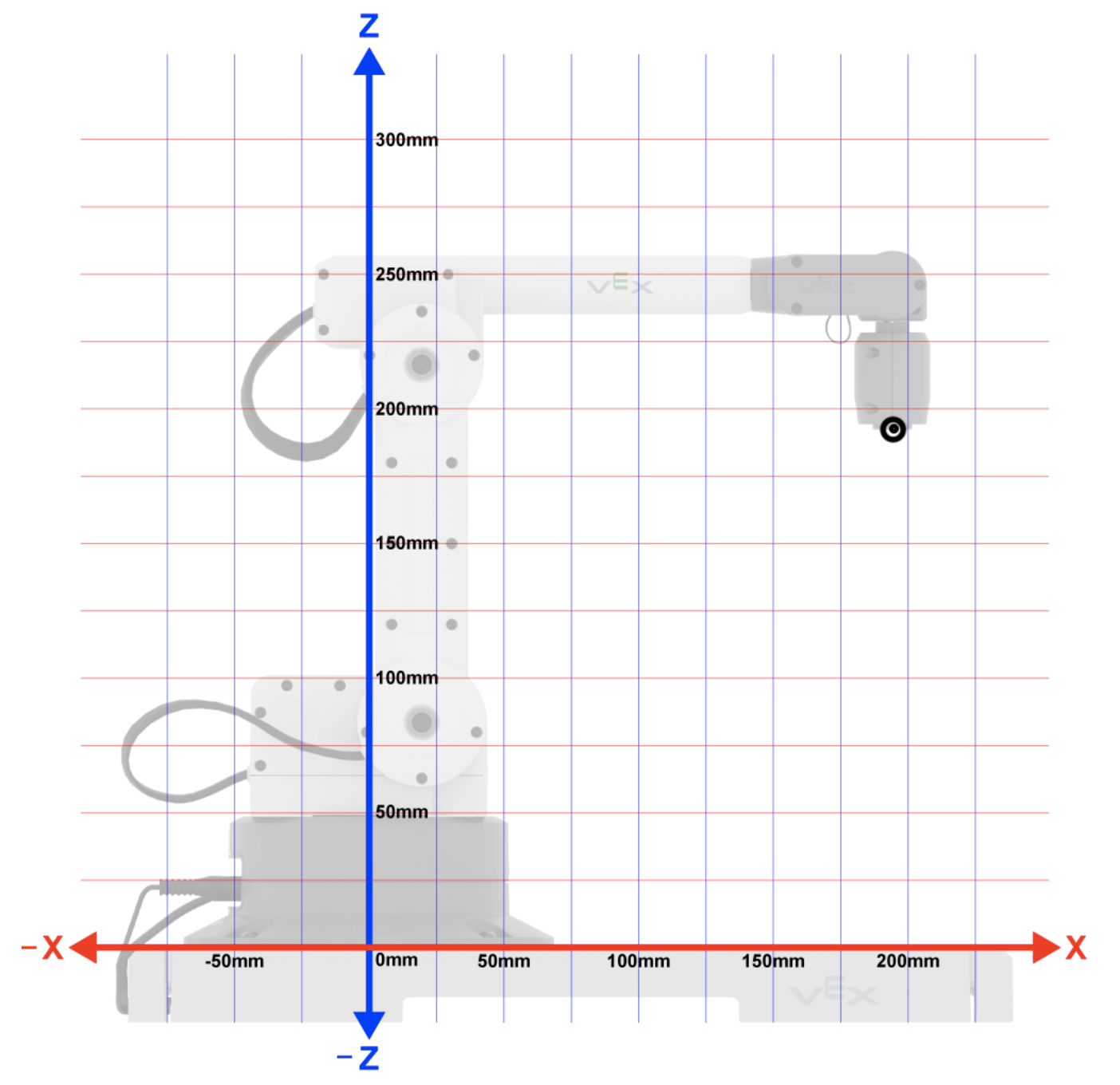
La collecte de la valeur de l'axe z peut être effectuée en déterminant la distance entre la tuile et le TCP.
Dans cet exemple, la valeur z du TCP peut être estimée à un peu moins de 200 mm à l'aide de la grille de coordonnées.
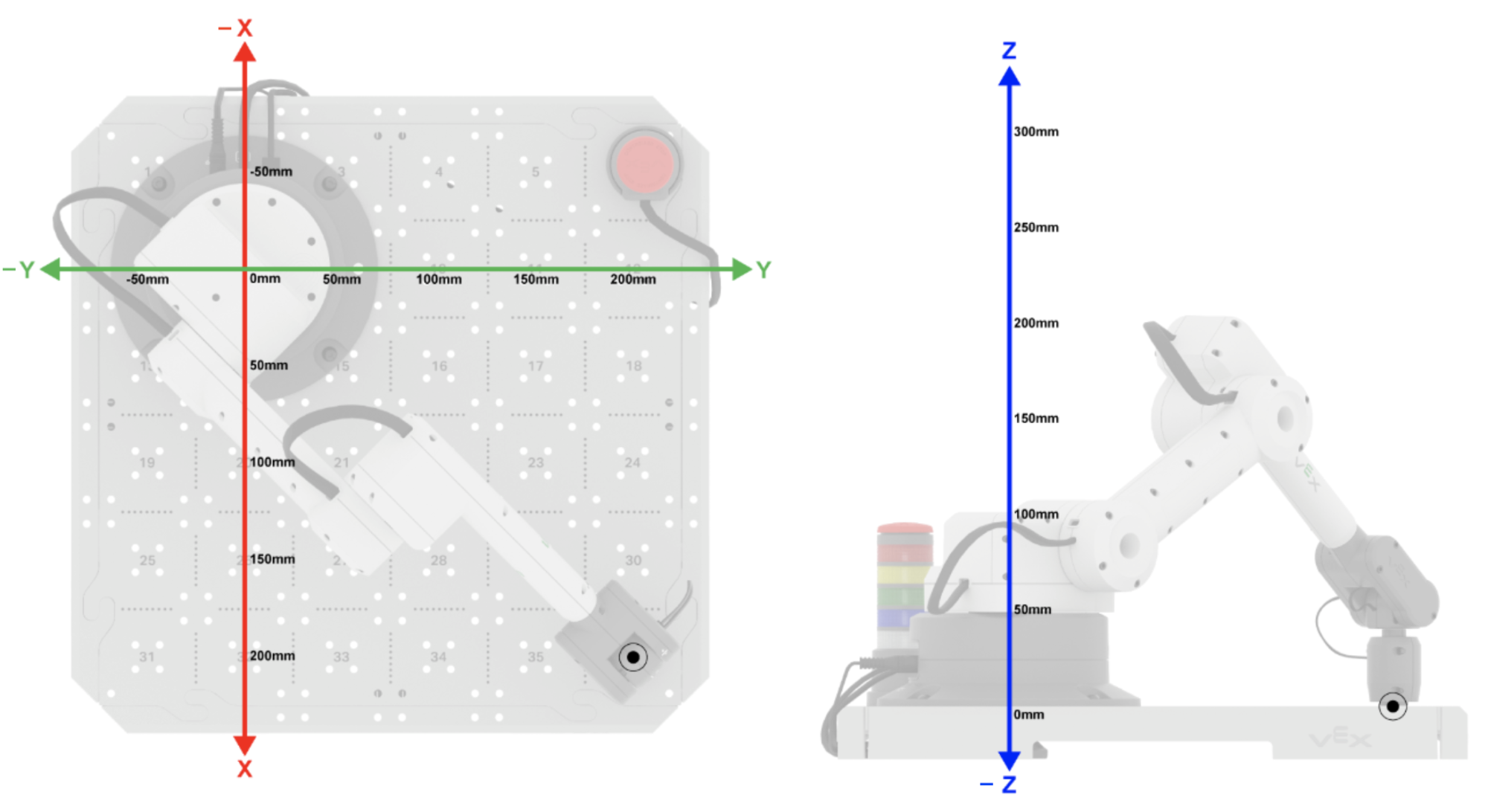
La coordonnée (x, y, z) est déterminée par la distance (en millimètres) entre l'origine et le TCP le long des trois axes.
Dans cet exemple, la coordonnée (x, y, z) serait (200, 200, 0) car le TCP est à 200 mm de l'origine dans l'axe des x, à 200 mm de l'origine dans l'axe des y et à 0 mm de l'origine dans l'axe des z.
Activité
Auparavant, dans cette leçon, nous avons discuté du système de coordonnées cartésiennes et de la façon de déterminer les coordonnées en fonction de la distance entre l'origine et le TCP. Dans cette activité, vous déterminerez les coordonnées de trois emplacements de tuiles.
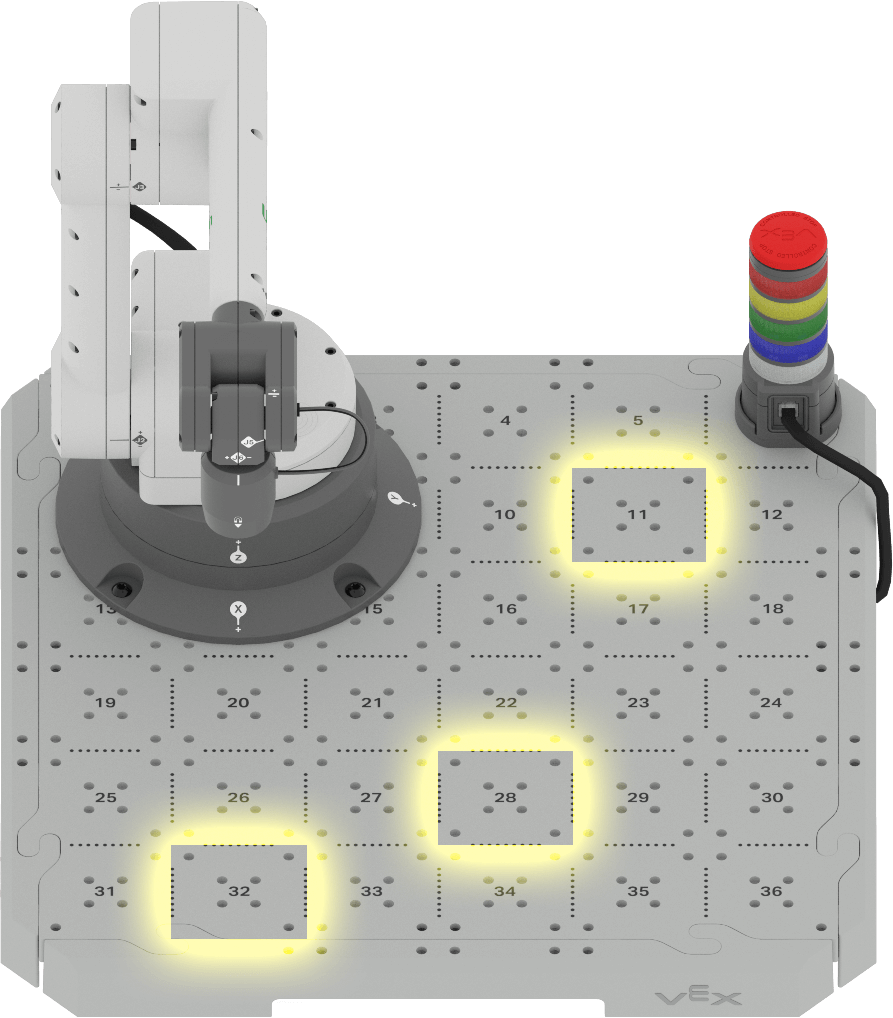
- Estimez les coordonnées (x, y, z) des emplacements de mosaïque suivants. Supposons que le bras à 6 axes touche chaque emplacement de tuile et que la coordonnée z soit 0 mm.
- Emplacement de la tuile 11
- Emplacement de la tuile 32
- Emplacement de la tuile 28
- Enregistrez ces coordonnées dans votre cahier d'ingénierie. Expliquez comment vous avez déterminé chaque coordonnée.
Vérifiez votre compréhension
Avant de commencer la prochaine leçon, assurez-vous de comprendre les concepts abordés dans cette leçon en répondant aux questions du document ci-dessous dans votre cahier d'ingénierie.
Vérifiez votre compréhension des questions > (Google Doc / .docx / .pdf)
Sélectionnez Suivant > pour apprendre à rassembler des coordonnées à l'aide des mouvements manuels.