
Ders 3: 6 Eksenli Kolun Koordinat Sistemi
Bu Derste, 6 Eksenli Robotik Kolda kullanılan Kartezyen koordinat sistemini öğreneceksiniz.
Bu Dersin sonunda, Kartezyen koordinat sistemi ve 6 Eksenli Kol ile ilişkisine dair anlayışınızı kullanarak üç CTE Döşeme konumunun koordinatlarını tahmin edeceksiniz.
Kartezyen Koordinat Sistemi
6 Eksenli Kolu uzayda hareket ettirebilmek için, 6 Eksenli Kolun istenilen yere hareket edebilmesi için ortak bir referans çerçevesine ihtiyacımız vardır. 6 Eksenli Kol, 6 Eksenli Kolun sonunun nerede olduğunu belirlemek için Kartezyen koordinat sistemini kullanır.
X, Y ve Z Eksenleri
Koordinat sistemi, değerlerin matematiksel bir ızgarasıdır. Koordinat sistemlerinin farklı tipleri vardır ancak 6 Eksenli Kol'da Kartezyen koordinat sistemi kullanılır. Bu sisteme 3D (Boyutsal) sistem de denir, çünkü üç boyutu x, y ve z eksenleridir.

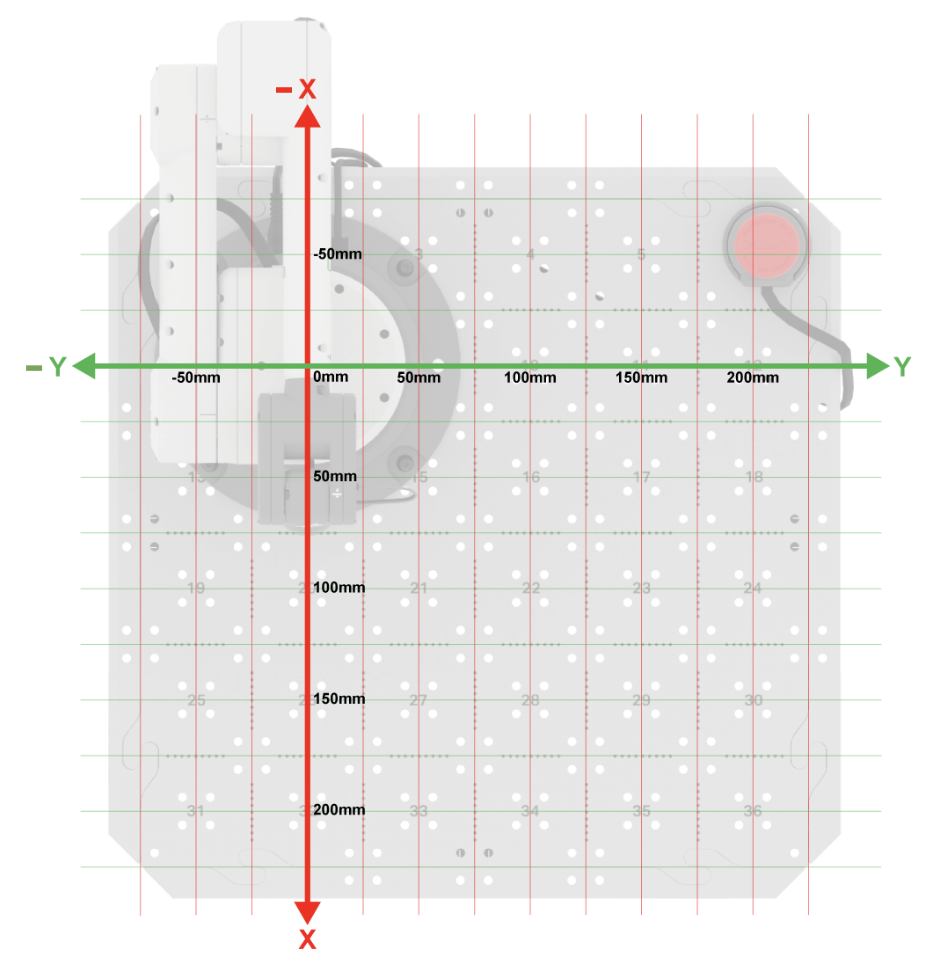
X ekseni, bu animasyonda gösterildiği gibi 6 Eksenli Kolun tabana doğru (geri çekilmiş) ve tabandan uzağa (uzatılmış) hareket ettirilmesiyle gösterilebilir.
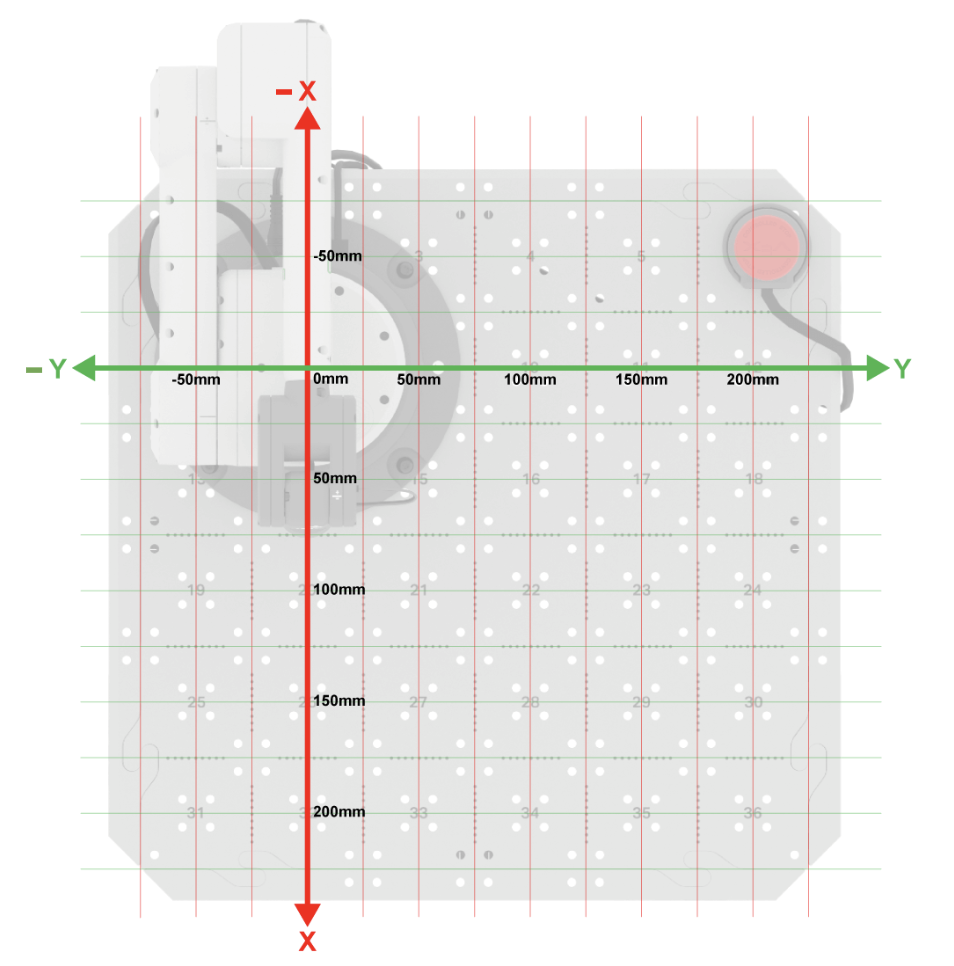
Y ekseni, bu animasyonda gösterildiği gibi, 6 Eksenli Kolu tabanın soluna ve sağına hareket ettirerek gösterilebilir.
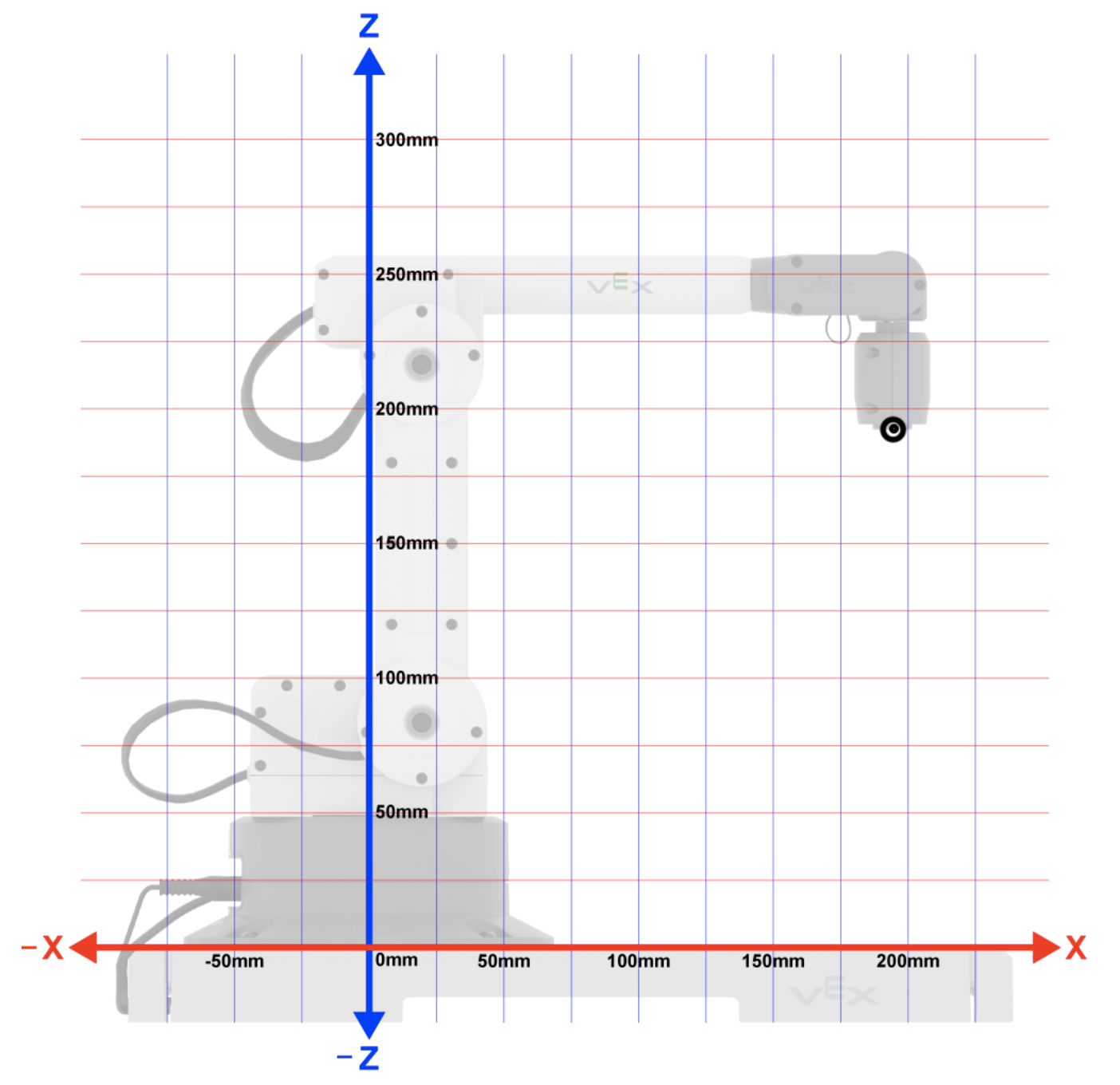
Z ekseni, bu animasyonda gösterildiği gibi, 6 Eksenli Kolu Karoya doğru aşağıya doğru, sonra da Karodan uzağa doğru yukarı doğru hareket ettirerek gösterilebilir.
Koordinat Tahmini
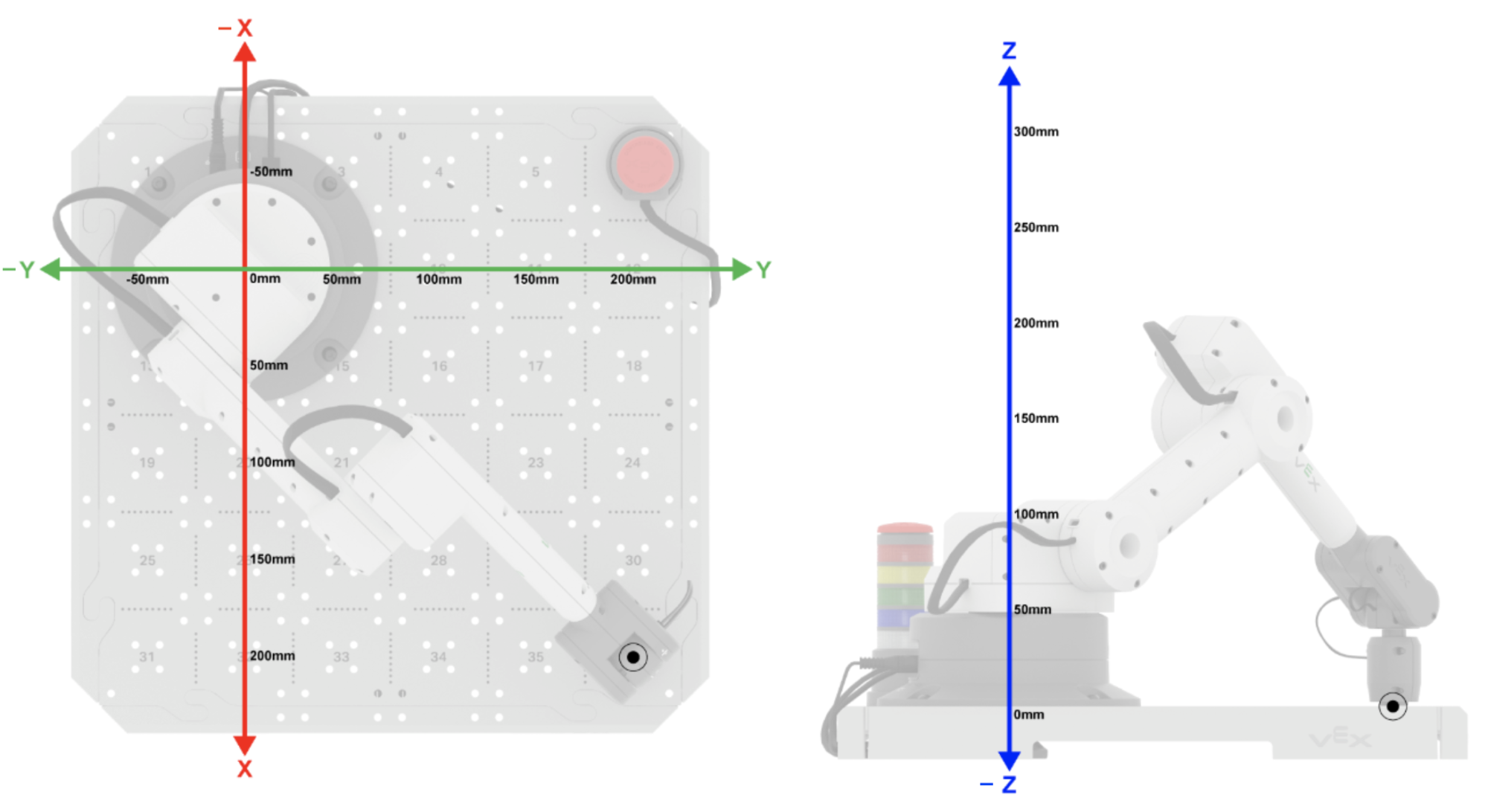
(x, y, z) koordinatı, orijin olarak da adlandırılan (0, 0, 0) koordinatından, Takım Merkez Noktası (TCP) adı verilen 6 Eksenli Kolun ucuna kadar olan mesafeyle belirlenir.
Başlangıç noktası veya (0, 0, 0) tüm değerlerin başladığı konumdur. 6 Eksenli Kol üzerindeki (0, 0, 0) noktası tabanın merkezinde yer almaktadır.

6 Eksenli Kolun ucu Takım Merkez Noktası (TCP) olarak bilinir.
Bu görüntüdeki 6 Eksenli Kol için TCP, Mıknatıs Alma Aracının sonundadır.

6 Eksenli Kolun x, y koordinatlarını belirlemenize yardımcı olması için buradaki görseli kullanabilirsiniz. Z ekseni aşağıdaki tabloda gösterilecektir.
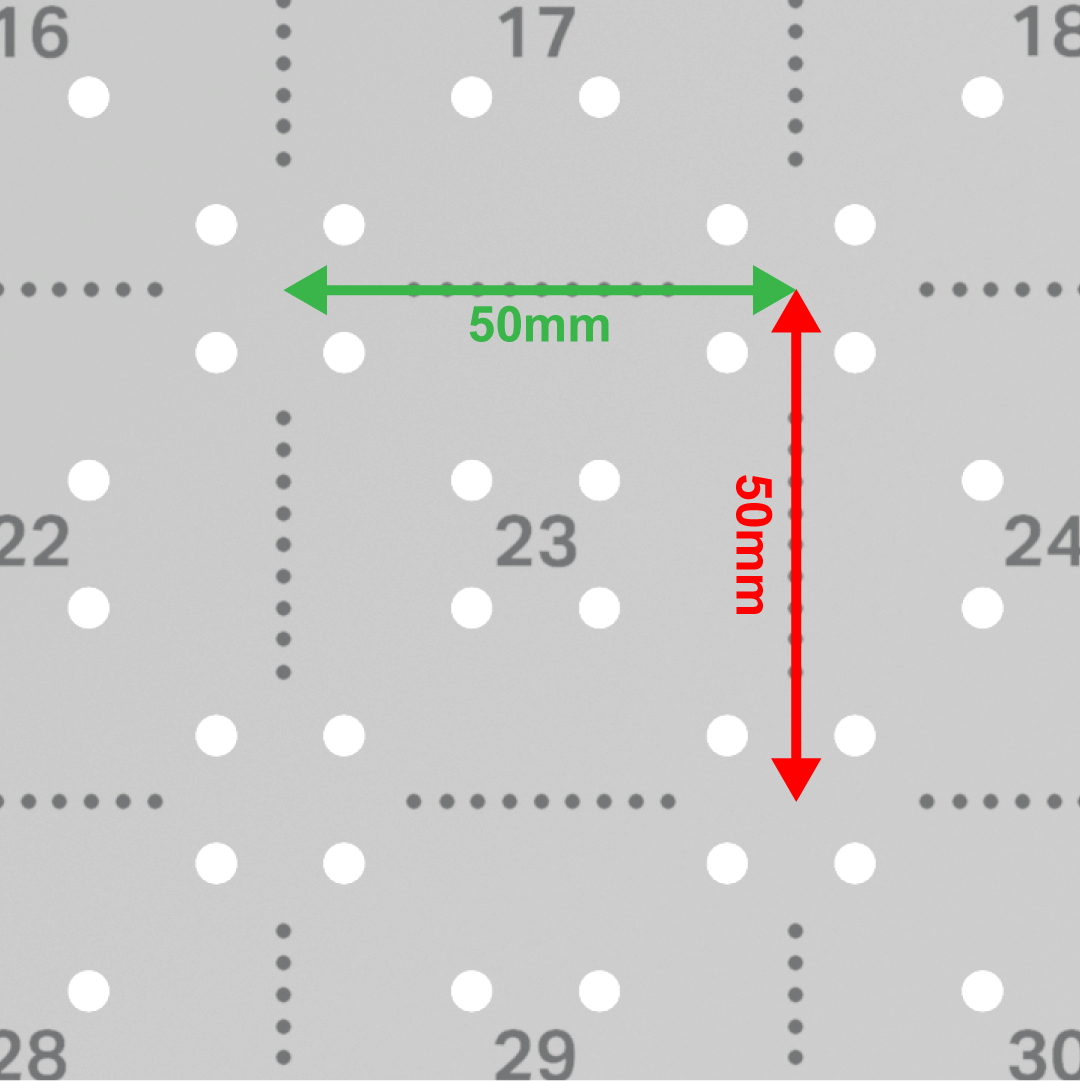
Karo üzerindeki her bir karenin ölçüsü 50mm x 50mm'dir.
Z eksenindeki değerin toplanması, Tile'dan TCP'ye olan mesafenin belirlenmesiyle yapılabilir.
Bu örnekte, TCP'nin z değerinin koordinat ızgarası kullanılarak 200 mm'nin hemen altında olduğu tahmin edilebilir.
(x, y, z) koordinatı, her üç eksen boyunca orijinden TCP'ye olan mesafeye (milimetre cinsinden) göre belirlenir.
Bu örnekte, (x, y, z) koordinatı (200, 200, 0) olur çünkü TCP, x ekseninde orijinden 200 mm, y ekseninde orijinden 200 mm ve z ekseninde orijinden 0 mm uzaklıktadır.
Etkinlik
Daha önceki dersimizde Kartezyen koordinat sistemini ve koordinatların orijinden TCP'ye olan uzaklığa göre nasıl belirleneceğini ele aldık. Bu etkinlikte üç adet Karo lokasyonunun koordinatlarını belirleyeceksiniz.
- Aşağıdaki Döşeme konumlarının (x, y, z) koordinatlarını tahmin edin. 6 Eksenli Kolun her Döşeme konumuna dokunduğunu ve z koordinatının 0 mm olduğunu varsayalım.
- Fayans konumu 11
- Fayans konumu 32
- Fayans konumu 28
- Bu koordinatları mühendislik defterinize kaydedin. Her koordinatı nasıl belirlediğinizi açıklayın.

Anlayışınızı Kontrol Edin
Bir sonraki Derse başlamadan önce, aşağıdaki belgede yer alan soruları mühendislik not defterinize yanıtlayarak bu Derste ele alınan kavramları anladığınızdan emin olun.
Anladığınızı Kontrol Edin soruları > (Google Dokümanı / .docx / .pdf)
Manuel hareketleri kullanarak koordinatların nasıl toplanacağını öğrenmek için Sonraki > seçin.