
पाठ 3: 6-अक्ष भुजा की निर्देशांक प्रणाली
इस पाठ में, आप 6-अक्ष रोबोटिक आर्म के साथ उपयोग की जाने वाली कार्टेशियन निर्देशांक प्रणाली के बारे में जानेंगे।
इस पाठ के अंत में, आप तीन CTE टाइल स्थानों के निर्देशांक का अनुमान लगाने के लिए कार्टेशियन निर्देशांक प्रणाली और 6-अक्ष भुजा के साथ इसके संबंध की अपनी समझ का उपयोग करेंगे।
कार्तीय निर्देशांक प्रणाली
अंतरिक्ष में 6-अक्ष भुजा को स्थानांतरित करने के लिए, हमें एक सामान्य संदर्भ फ्रेम की आवश्यकता होती है ताकि 6-अक्ष भुजा वांछित स्थान पर जा सके। 6-अक्ष भुजा का अंत कहां स्थित है, यह निर्धारित करने के लिए 6-अक्ष भुजा कार्तीय निर्देशांक प्रणाली का उपयोग करती है।
X, Y, और Z-अक्ष
निर्देशांक प्रणाली मानों का एक गणितीय ग्रिड है। निर्देशांक प्रणालियाँ विभिन्न प्रकार की होती हैं, लेकिन कार्तीय निर्देशांक प्रणाली का प्रयोग 6-अक्ष भुजा के साथ किया जाता है। इसे 3D (आयामी) प्रणाली के रूप में भी जाना जाता है, क्योंकि इसके तीन आयाम x, y और z-अक्ष हैं।
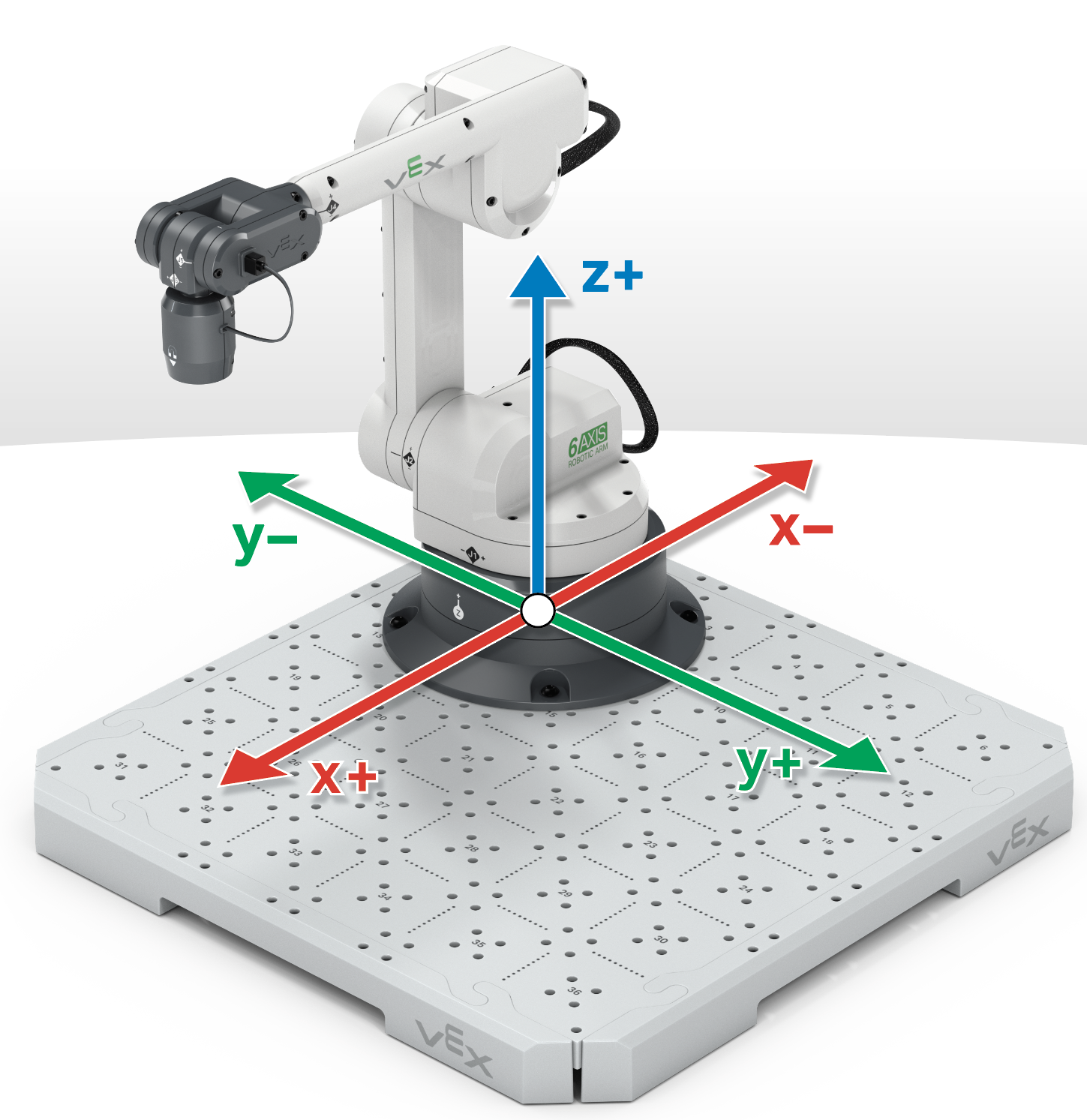
x-अक्ष को 6-अक्ष भुजा को आधार की ओर (पीछे की ओर) तथा आधार से दूर (विस्तारित) ले जाकर प्रदर्शित किया जा सकता है, जैसा कि इस एनीमेशन में दिखाया गया है।
6-अक्ष भुजा को आधार के बायीं और दायीं ओर ले जाकर y-अक्ष को प्रदर्शित किया जा सकता है, जैसा कि इस एनीमेशन में दिखाया गया है।
z-अक्ष को 6-अक्ष भुजा को टाइल की ओर नीचे और फिर टाइल से दूर ऊपर ले जाकर प्रदर्शित किया जा सकता है, जैसा कि इस एनीमेशन में दिखाया गया है।
निर्देशांक का अनुमान लगाना
(x, y, z) निर्देशांक का निर्धारण (0, 0, 0) निर्देशांक, जिसे मूल बिंदु भी कहा जाता है, से 6-अक्ष भुजा के अंत तक की दूरी से होता है, जिसे टूल सेंटर पॉइंट (TCP) कहा जाता है।
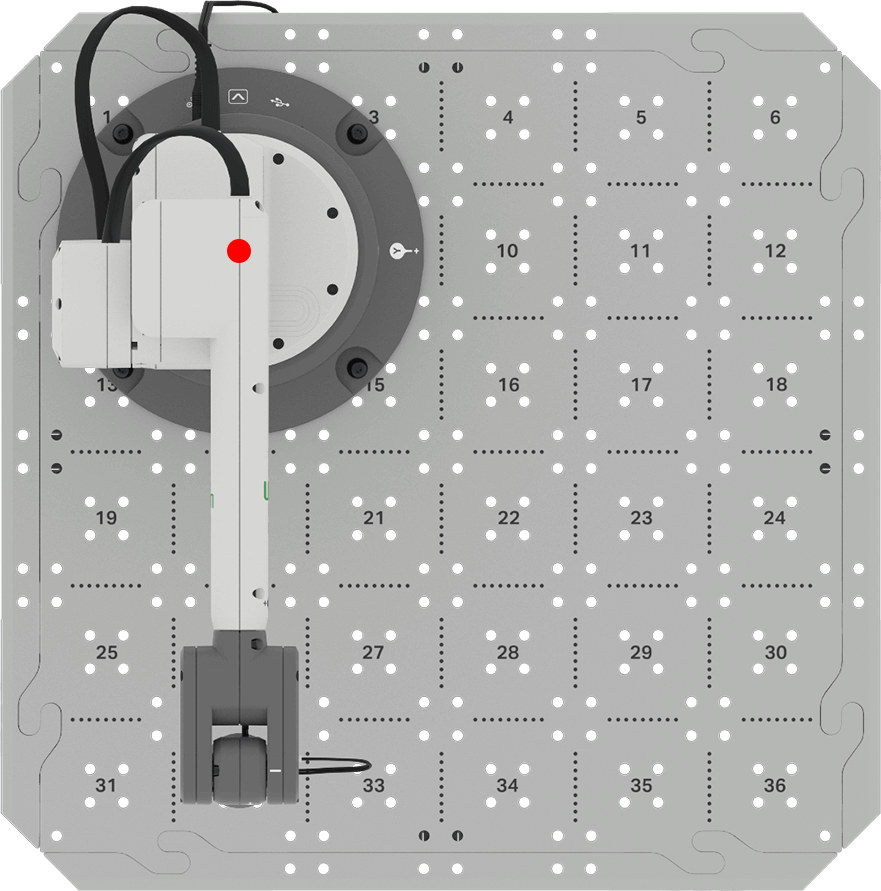
मूल बिंदु या (0, 0, 0) वह स्थान है जहां से सभी मान प्रारंभ होते हैं। 6-अक्ष भुजा पर (0, 0, 0) आधार के केंद्र में स्थित है।
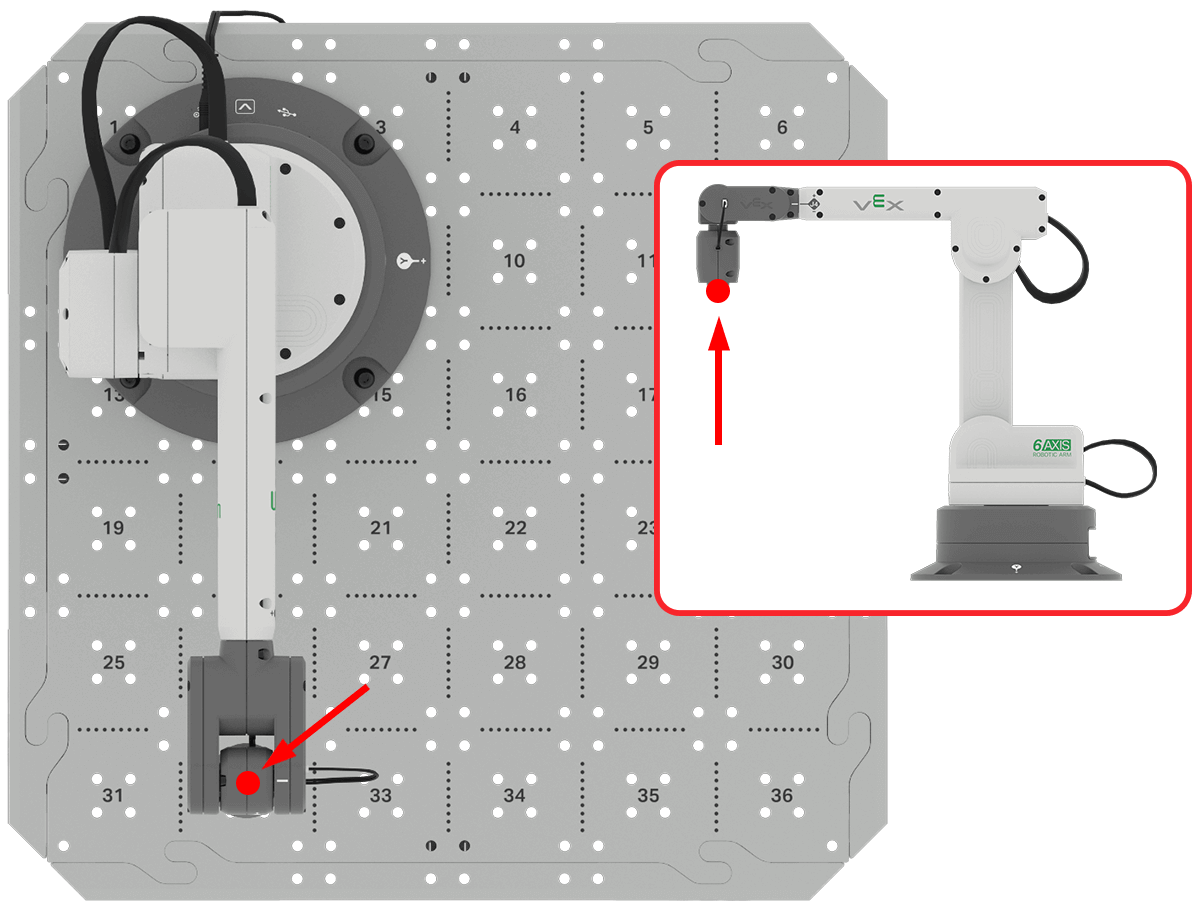
6-अक्ष भुजा के अंत को टूल सेंटर प्वाइंट (टीसीपी) के रूप में जाना जाता है।
इस छवि में 6-अक्ष भुजा के लिए, TCP मैग्नेट पिकअप टूल के अंत में है।
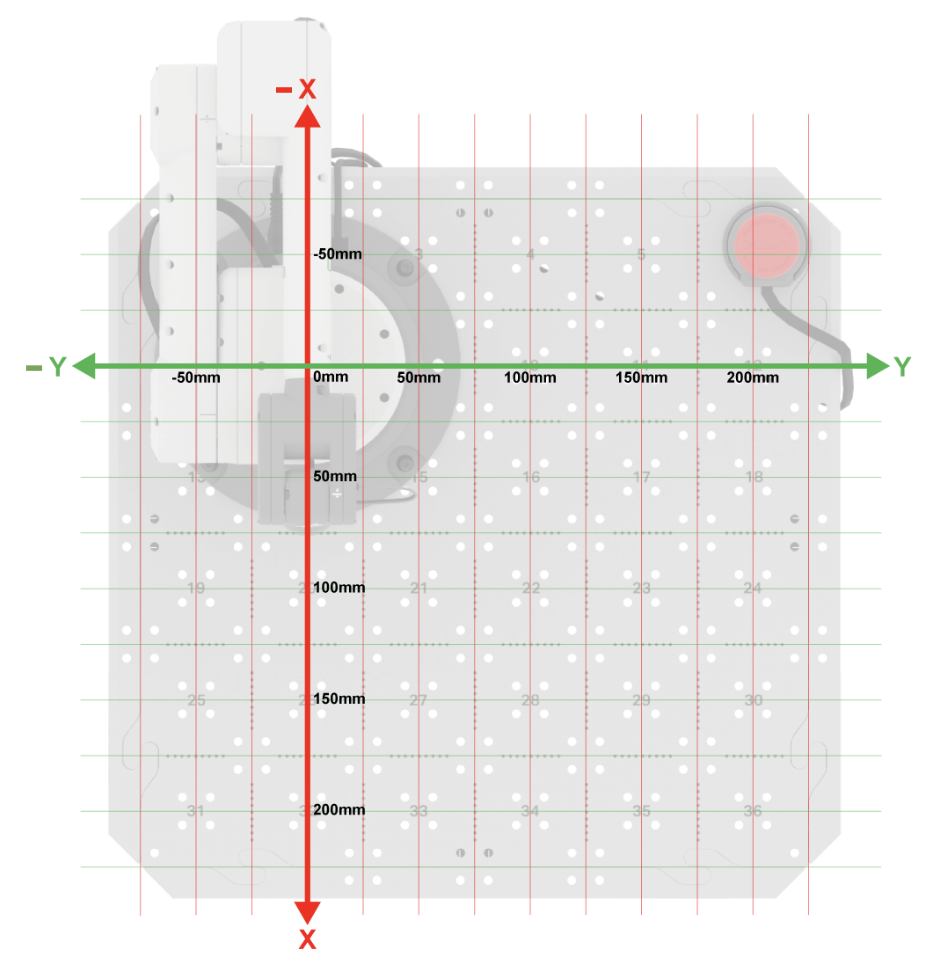
आप 6-अक्ष भुजा के x, y-निर्देशांक निर्धारित करने में सहायता के लिए यहां दी गई छवि का उपयोग कर सकते हैं। Z-अक्ष को निम्नलिखित ग्रिड में दिखाया जाएगा।
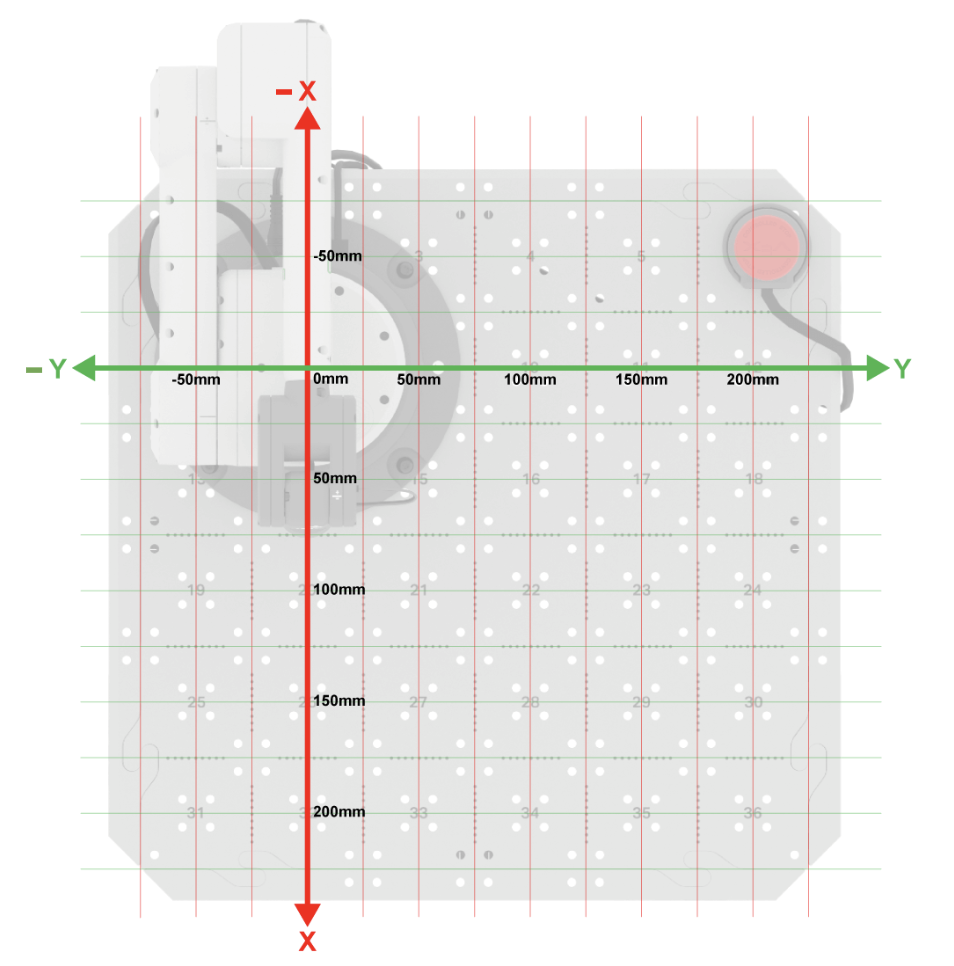
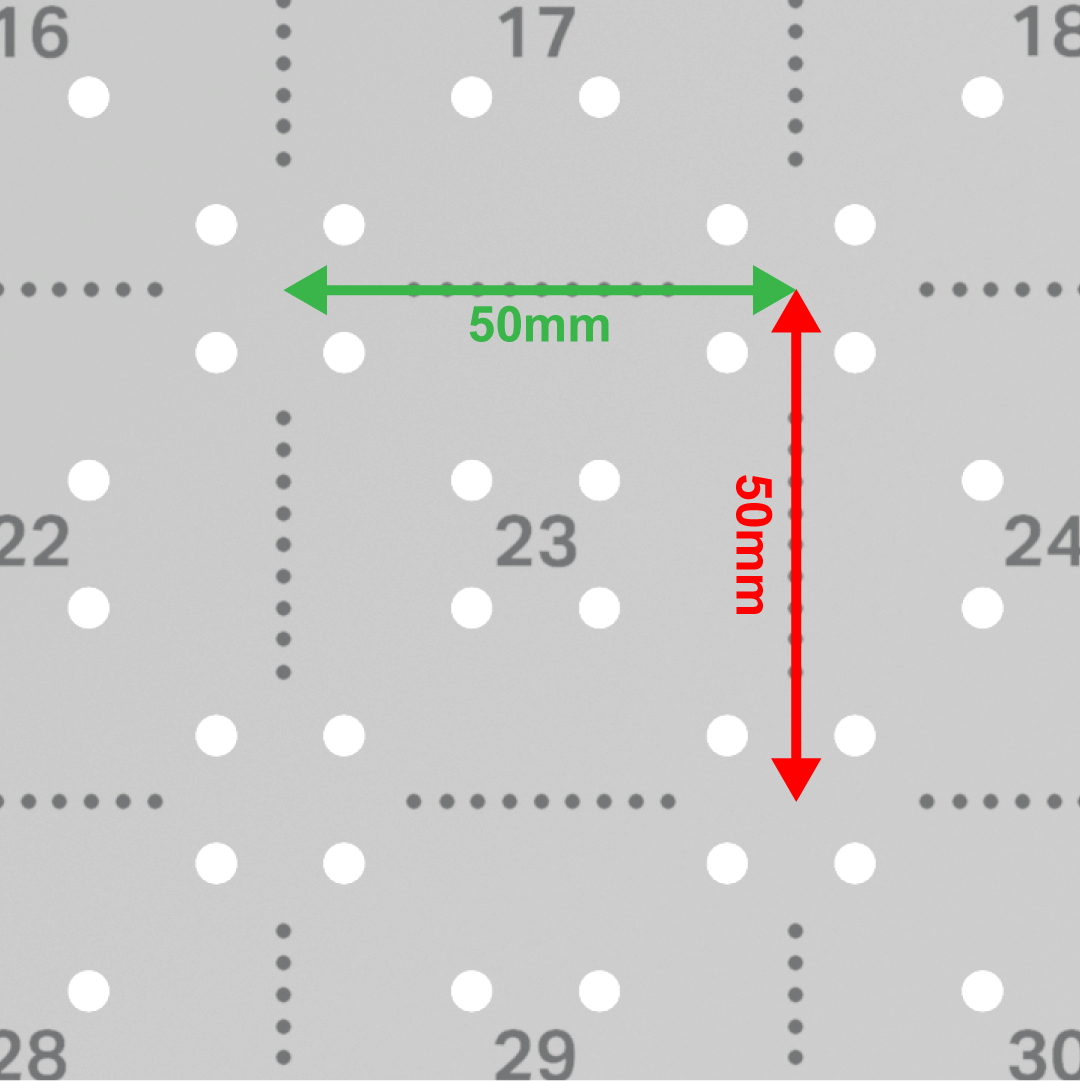
टाइल पर प्रत्येक वर्ग का माप 50 मिमी x 50 मिमी है।
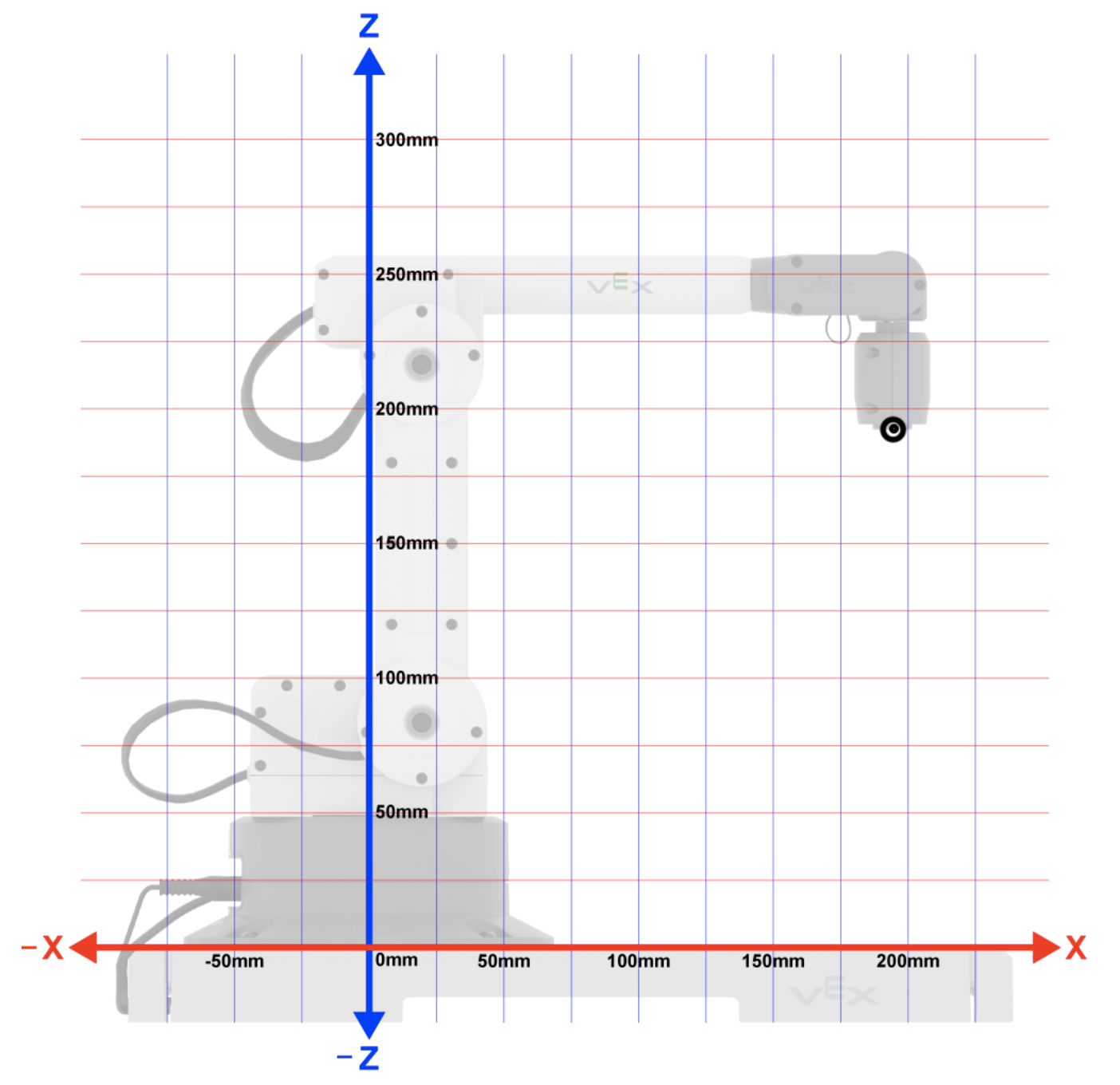
टाइल से TCP तक की दूरी निर्धारित करके z-अक्ष मान एकत्रित किया जा सकता है।
इस उदाहरण में, निर्देशांक ग्रिड का उपयोग करके TCP का z-मान 200 मिमी से थोड़ा कम अनुमानित किया जा सकता है।
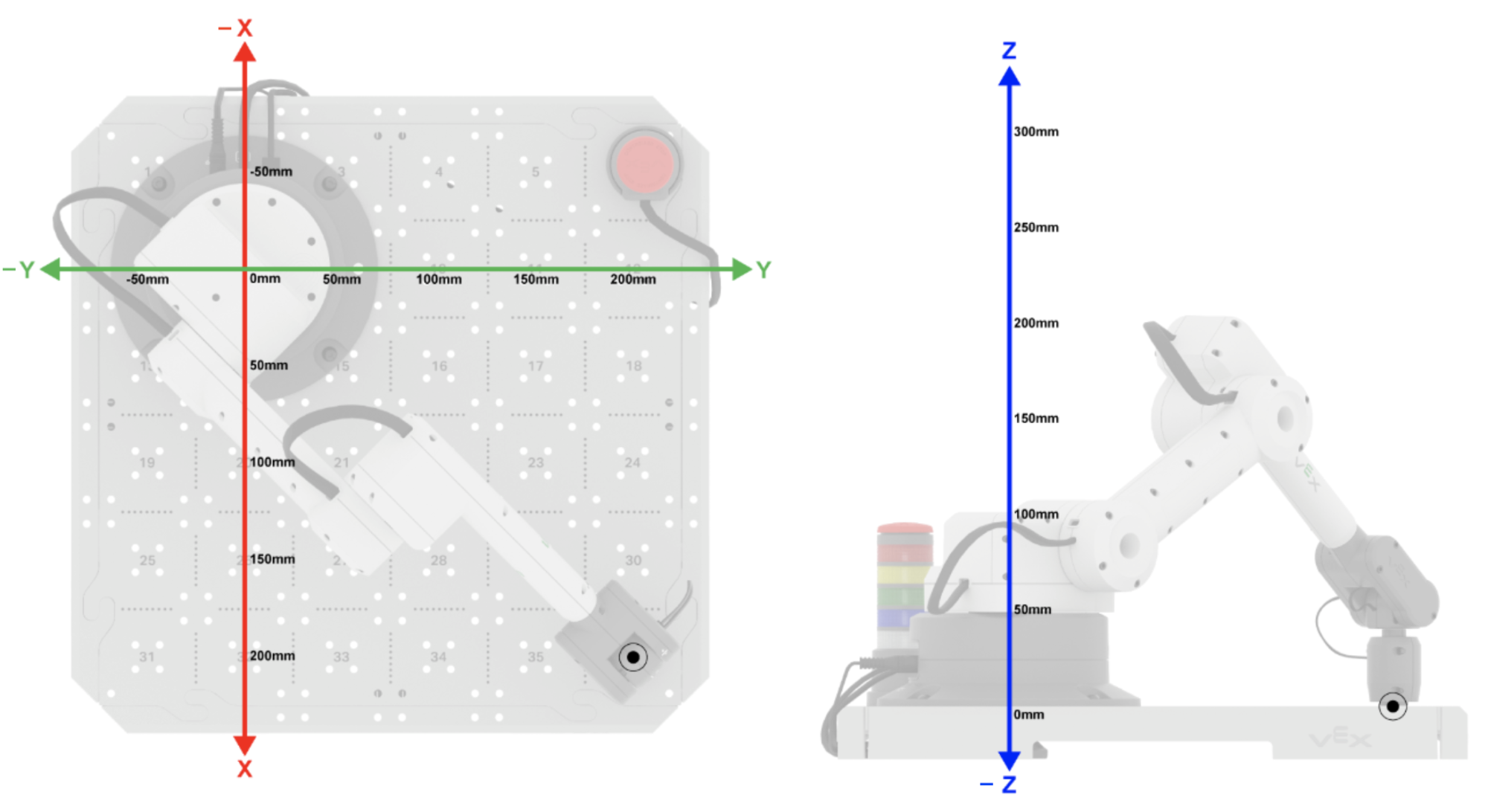
(x, y, z) निर्देशांक का निर्धारण मूल बिंदु से TCP तक तीनों अक्षों के साथ दूरी (मिलीमीटर में) द्वारा किया जाता है।
इस उदाहरण में, (x, y, z) निर्देशांक (200, 200, 0) होगा क्योंकि TCP x-अक्ष में मूल बिंदु से 200 मिमी, y-अक्ष में मूल बिंदु से 200 मिमी, तथा z-अक्ष में मूल बिंदु से 0 मिमी दूर है।
गतिविधि
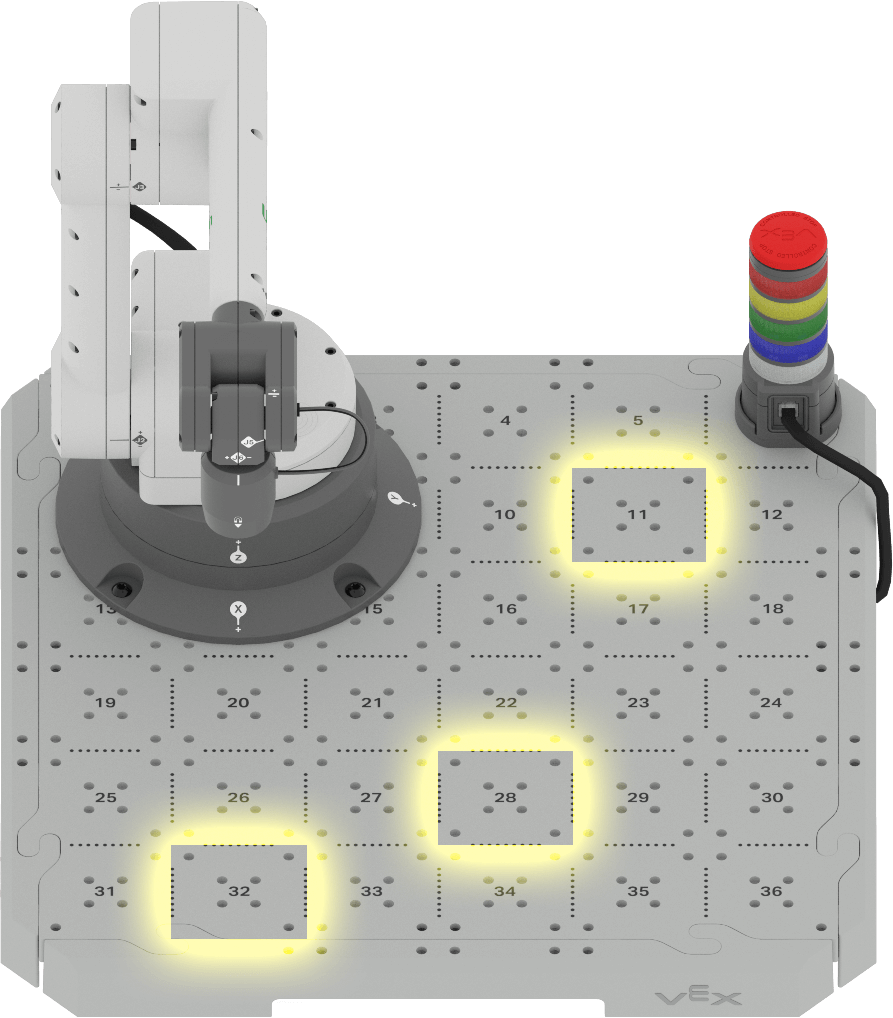
इस पाठ में पहले हमने कार्तीय निर्देशांक प्रणाली तथा मूल बिंदु से टीसीपी तक की दूरी के आधार पर निर्देशांक निर्धारित करने के तरीके पर चर्चा की थी। इस गतिविधि में, आप तीन टाइल स्थानों के निर्देशांक निर्धारित करेंगे।
- निम्नलिखित टाइल स्थानों के (x, y, z) निर्देशांक का अनुमान लगाएं। मान लें कि 6-अक्ष भुजा प्रत्येक टाइल स्थान को स्पर्श कर रही है और z-निर्देशांक 0 मिमी है।
- टाइल स्थान 11
- टाइल स्थान 32
- टाइल स्थान 28
- इन निर्देशांकों को अपनी इंजीनियरिंग नोटबुक में दर्ज करें। बताएं कि आपने प्रत्येक निर्देशांक का निर्धारण कैसे किया।
अपनी समझ की जाँच करें
अगला पाठ शुरू करने से पहले, सुनिश्चित करें कि आप अपनी इंजीनियरिंग नोटबुक में नीचे दिए गए दस्तावेज़ में दिए गए प्रश्नों के उत्तर देकर इस पाठ में शामिल अवधारणाओं को समझते हैं।
अपनी समझ की जाँच करें प्रश्न > (Google Doc / .docx / .pdf)
मैन्युअल मूवमेंट का उपयोग करके निर्देशांक एकत्र करने का तरीका जानने के लिए अगला > का चयन करें।