
ในบทเรียนนี้ท่านจะได้เรียนรู้เกี่ยวกับระบบพิกัดคาร์ทีเซียนที่ใช้กับแขนกลหุ่นยนต์ 6 แกน
ในตอนท้ายของบทเรียนนี้คุณจะใช้ความเข้าใจของคุณเกี่ยวกับระบบพิกัดคาร์ทีเซียนและความสัมพันธ์กับแขน 6 แกนเพื่อประมาณพิกัดของตำแหน่ง CTE Tile สามตำแหน่ง
ระบบพิกัดคาร์ทีเซียน
ในการเคลื่อนแขน 6 แกนในอวกาศเราต้องมีกรอบการอ้างอิงร่วมกันเพื่อให้แขน 6 แกนสามารถเคลื่อนไปยังตำแหน่งที่ต้องการได้ แขน 6 แกนใช้ระบบพิกัดคาร์ทีเซียนเพื่อกำหนดตำแหน่งปลายของแขน 6 แกน
แกน X, Y และ Z
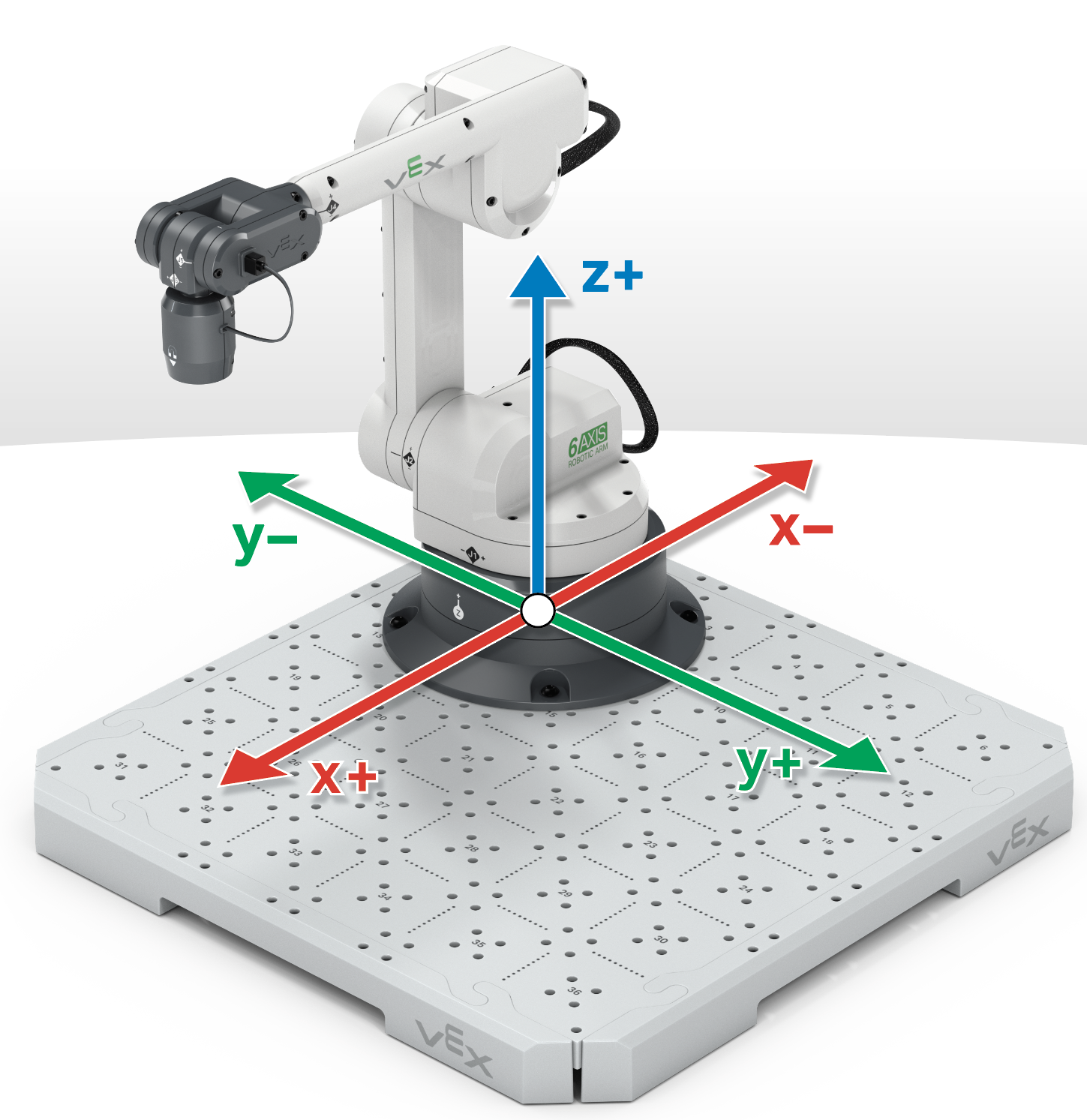
ระบบพิกัดคือกริดทางคณิตศาสตร์ของค่า ระบบพิกัดมีหลายประเภทแต่ระบบพิกัดคาร์ทีเซียนใช้กับแขน 6 แกน นี่เป็นที่รู้จักกันในชื่อระบบ 3D (มิติ) เนื่องจากสามมิติของมันคือแกน x, y และ z
แกน x สามารถแสดงให้เห็นได้โดยการเคลื่อนแขน 6 แกนไปยังฐาน (หดกลับ) และห่างจากฐาน (ยืดออก)
แกน y สามารถแสดงให้เห็นได้โดยการเลื่อนแขน 6 แกนไปทางซ้ายและขวาของฐาน
แกน z สามารถแสดงให้เห็นได้โดยการเคลื่อนแขน 6 แกนลงไปทางกระเบื้องจากนั้นขึ้นไปจากกระเบื้อง
การประมาณพิกัด
พิกัด (x, y, z) ถูกกำหนดหาโดยระยะห่างจากพิกัด (0, 0, 0) หรือที่เรียกว่าจุดกำเนิดไปยังจุดสิ้นสุดของแขน 6 แกนที่เรียกว่า Tool Center Point (TCP)
จุดกำเนิดหรือ (0, 0, 0) คือตำแหน่งที่ค่าทั้งหมดเริ่มต้น (0, 0, 0) บนแขน 6 แกนตั้งอยู่ที่ศูนย์กลางของฐาน
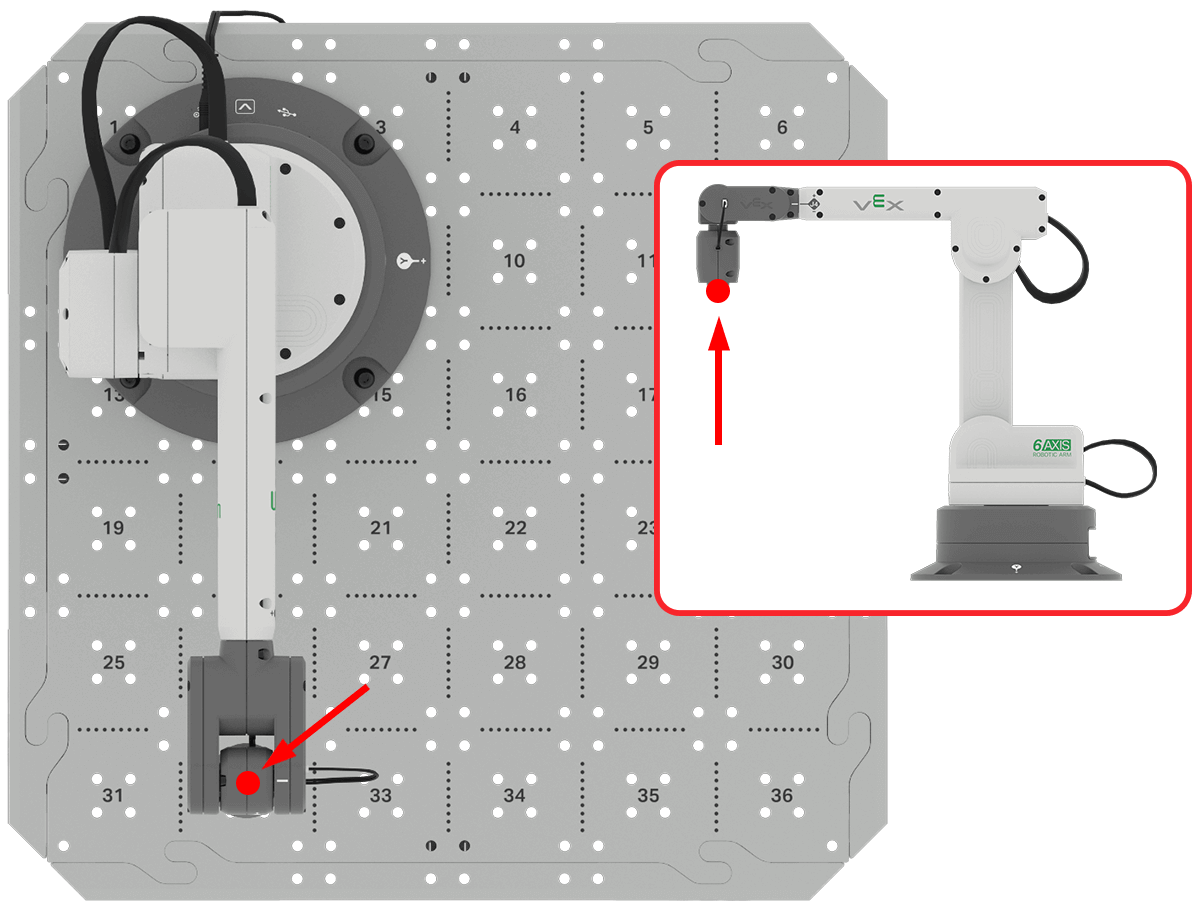
ปลายของแขน 6 แกนเป็นที่รู้จักกันในชื่อ Tool Center Point (TCP)
สำหรับแขน 6 แกนในภาพนี้ TCP จะอยู่ที่ส่วนท้ายของเครื่องมือรับแม่เหล็ก
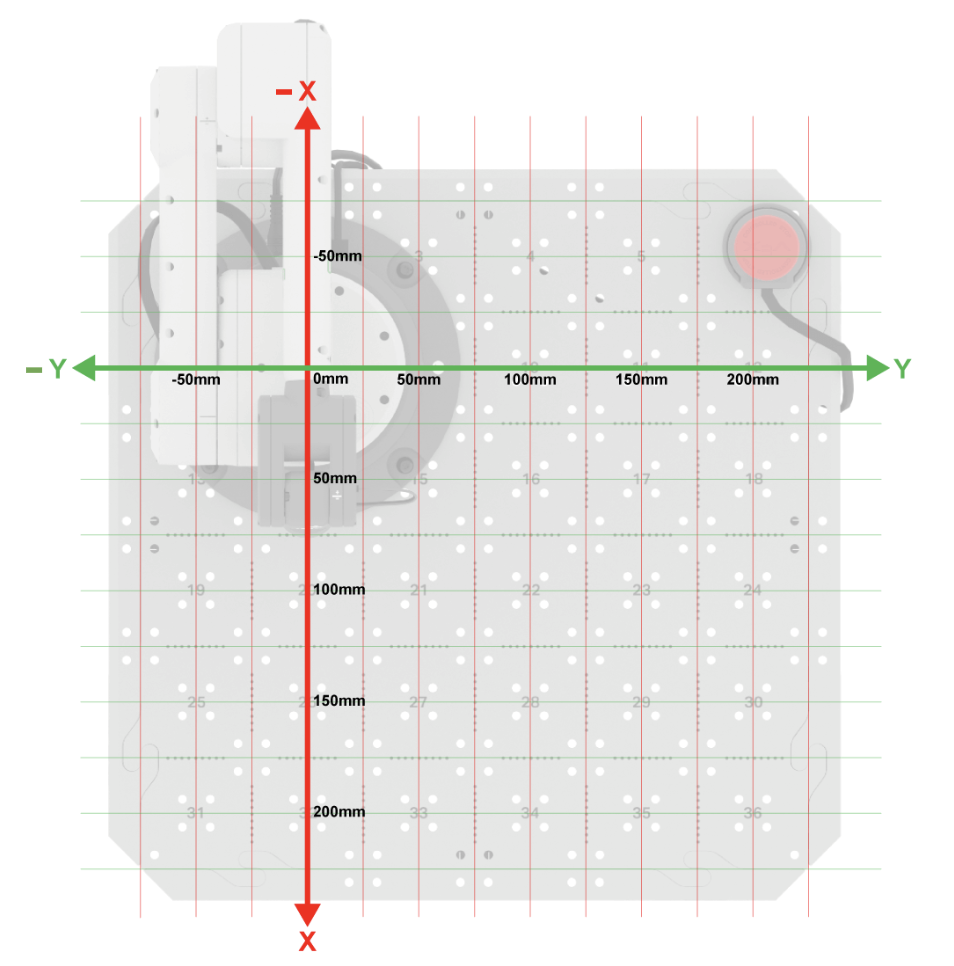
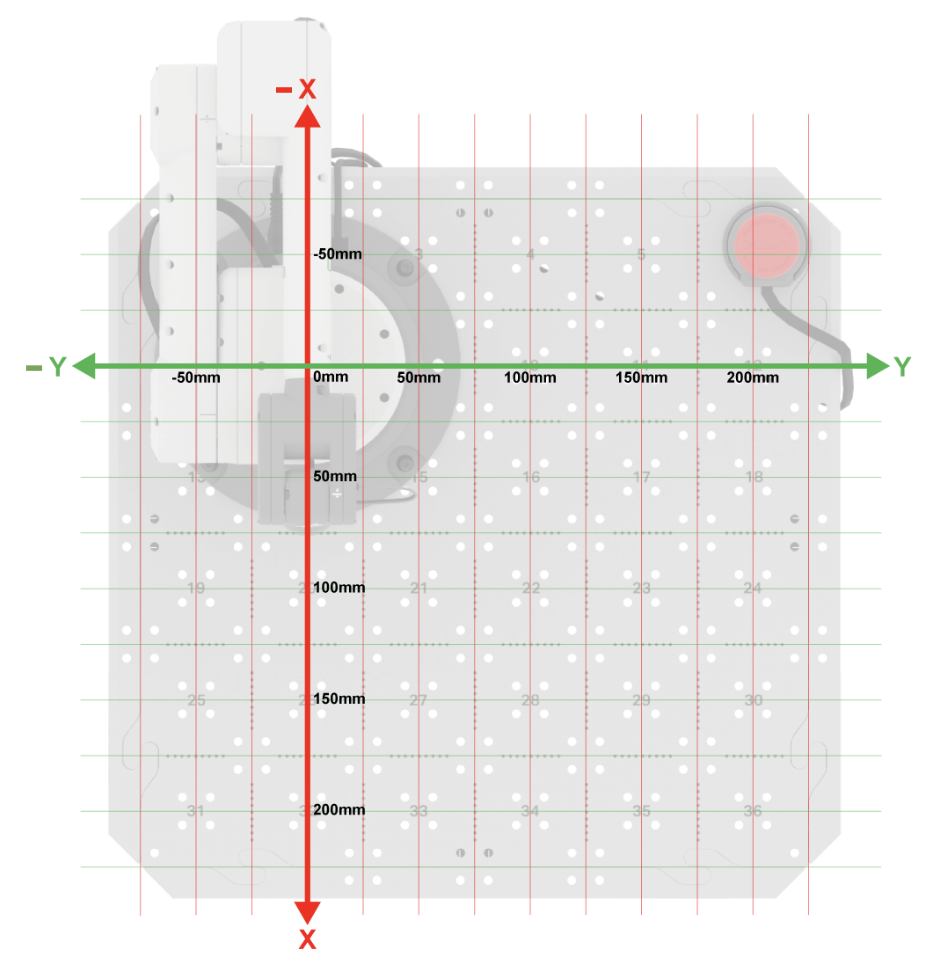
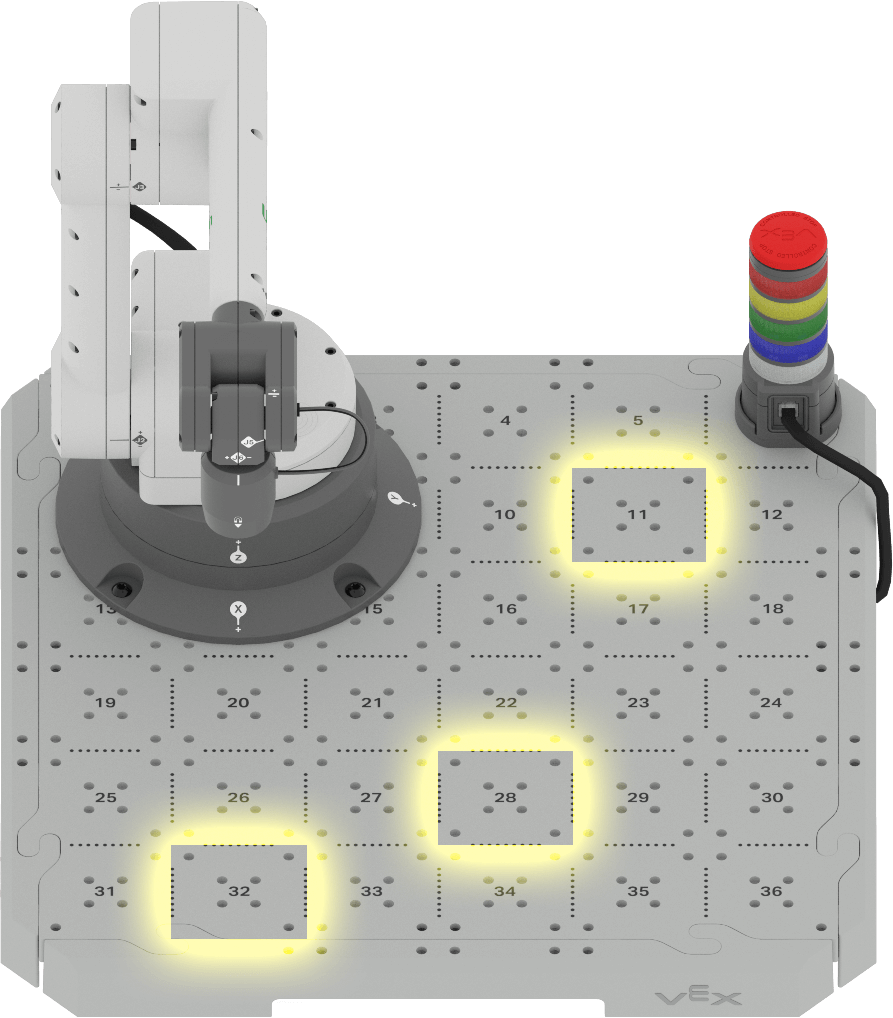
คุณสามารถใช้ภาพที่นี่เพื่อช่วยกำหนดพิกัด x, y ของแขน 6 แกน แกน z จะแสดงในตารางต่อไปนี้
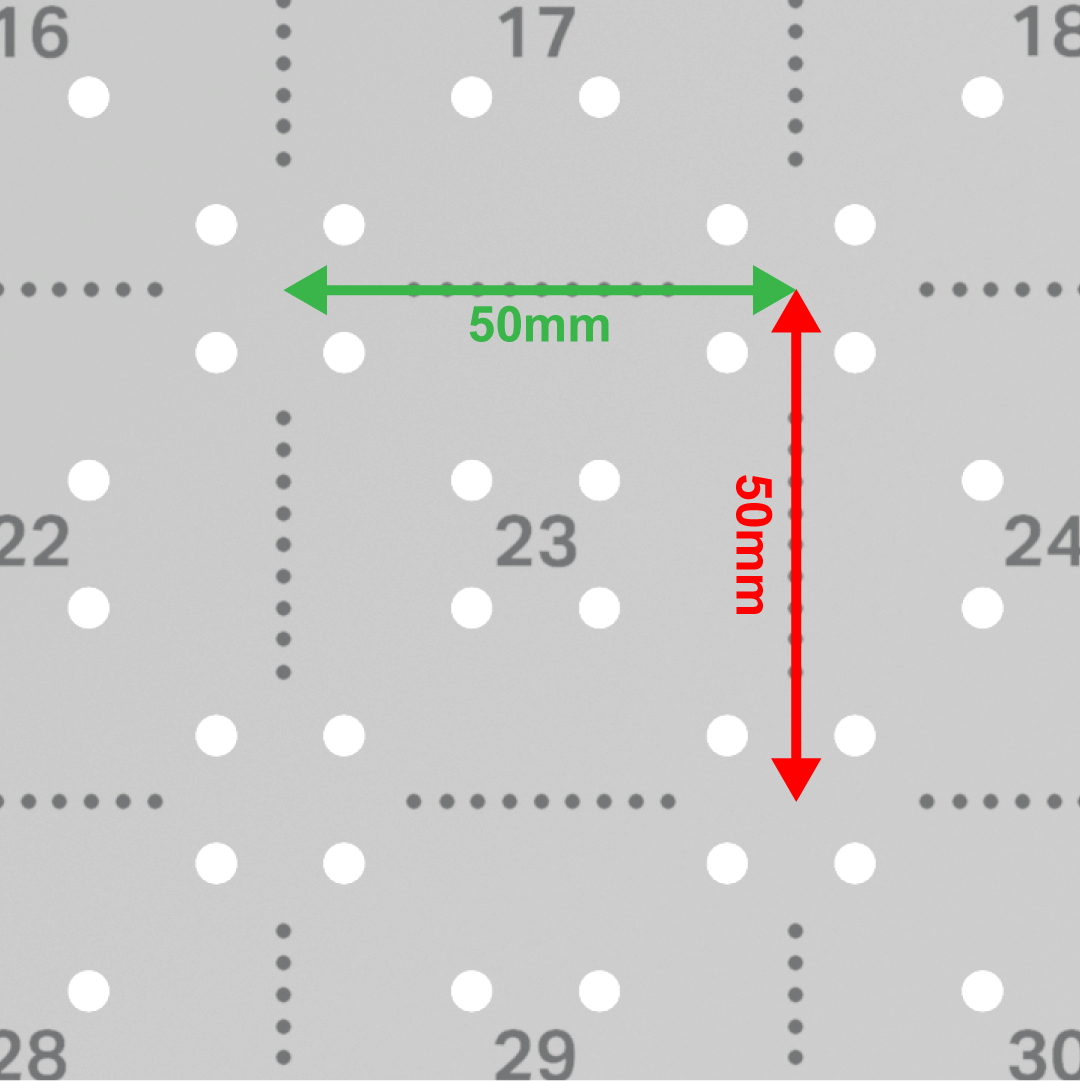
การวัดสี่เหลี่ยมแต่ละอันบนกระเบื้องมีขนาด 50 มม. คูณ 50 มม. The measurement of each of the individual squares on the Tile is 50mm by 50mm.
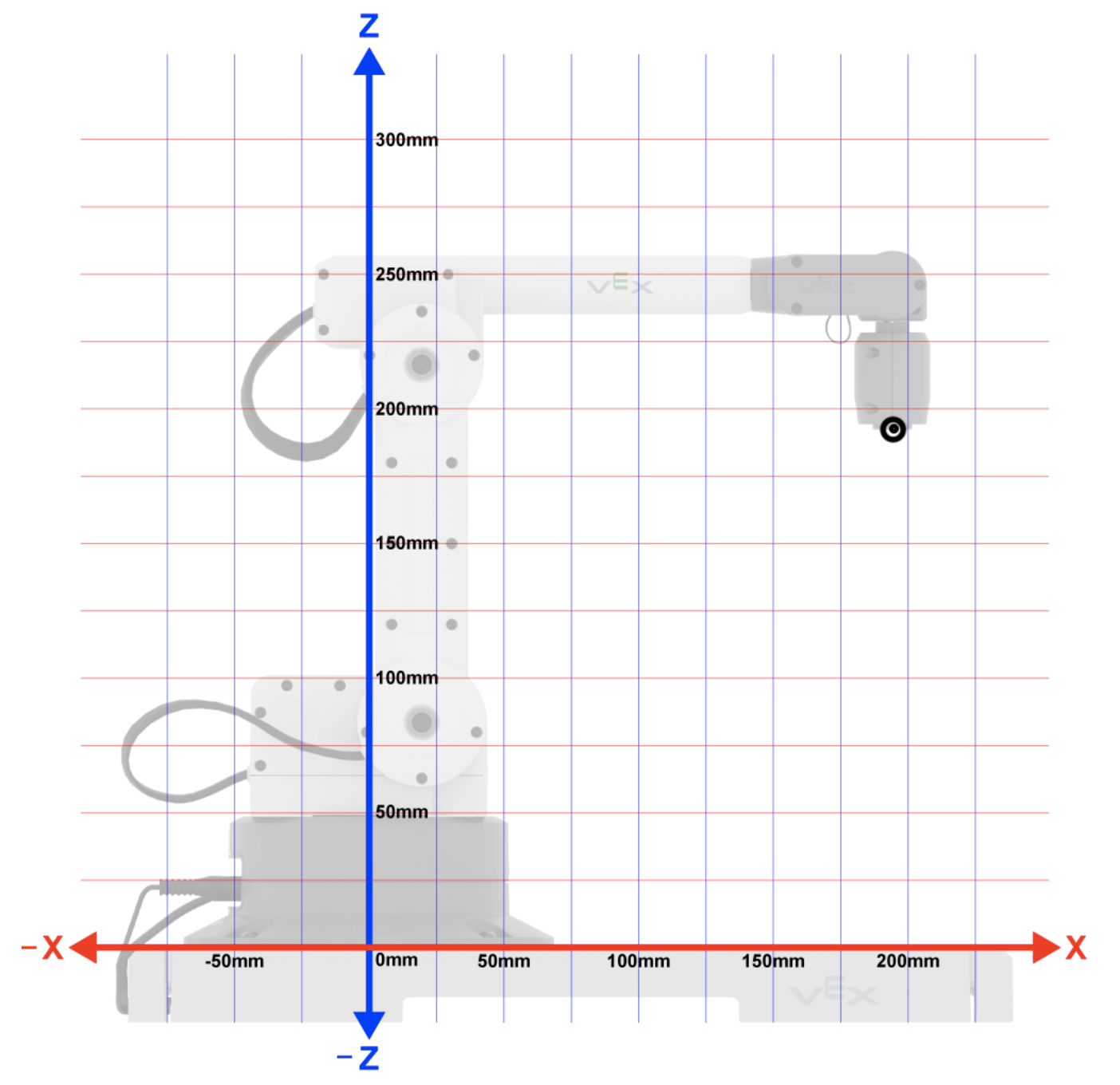
การรวบรวมค่าแกน z สามารถทำได้โดยการกำหนดระยะห่างจากไทล์ไปยัง TCP
ในตัวอย่างนี้ค่า z ของ TCP สามารถประมาณได้ว่าต่ำกว่า 200 มม. โดยใช้กริดพิกัด
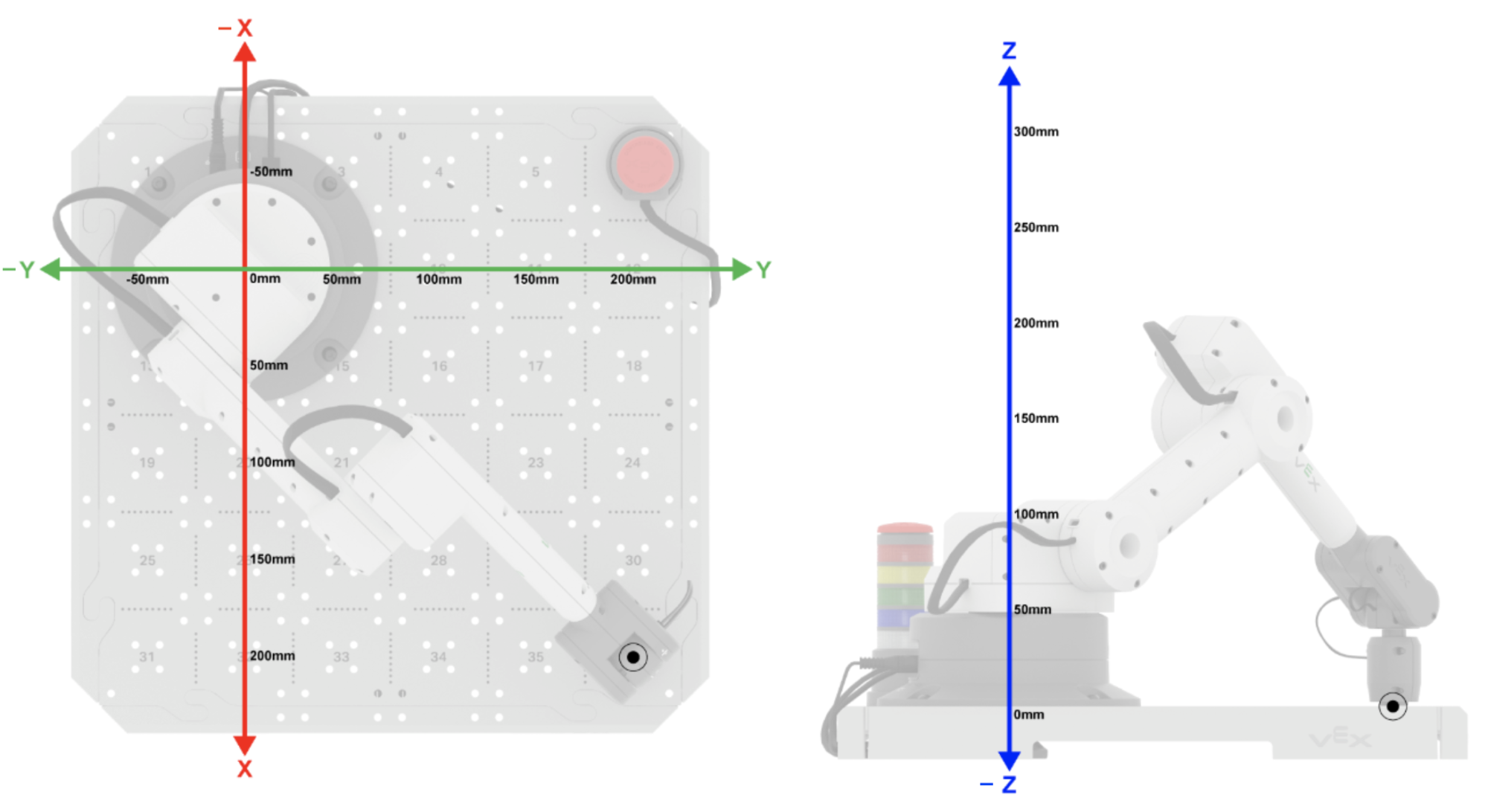
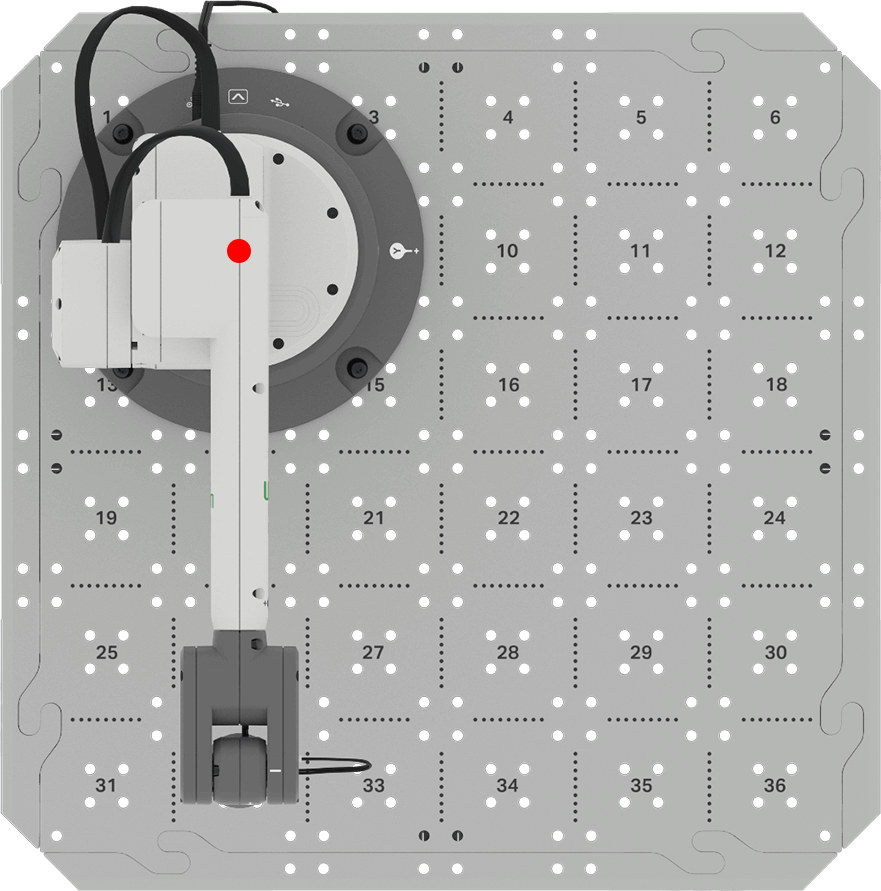
พิกัด (x, y, z) ถูกกำหนดโดยระยะทาง (เป็นมิลลิเมตร) จากจุดเริ่มต้นไปยัง TCP ตลอดทั้งสามแกน
ในตัวอย่างนี้พิกัด (x, y, z) จะเป็น (200, 200, 0) เนื่องจาก TCP อยู่ห่างจากจุดเริ่มต้น 200 มม. ในแกน x, 200 มม. จากจุดเริ่มต้นในแกน y และ 0 มม. จากจุดเริ่มต้นในแกน z
กิจกรรม
ก่อนหน้านี้ในบทเรียนนี้เราได้กล่าวถึงระบบพิกัดคาร์ทีเซียนและวิธีการกำหนดพิกัดตามระยะทางจากต้นทางไปยัง TCP ในกิจกรรมนี้คุณจะกำหนดพิกัดของตำแหน่งไทล์สามตำแหน่ง
- ประมาณ ค่าพิกัด (x, y, z) ของตำแหน่งไทล์ต่อไปนี้ สมมติว่าแกนแขน 6
แกนสัมผัสตำแหน่งกระเบื้องแต่ละตำแหน่งและพิกัด z เป็น 0 มม.
- ตำแหน่งกระเบื้อง 11
- ตำแหน่งกระเบื้อง 32
- ตำแหน่งกระเบื้อง 28
- บันทึกพิกัดเหล่านี้ลงในสมุดบันทึกวิศวกรรมของคุณ อธิบายว่าคุณกำหนดพิกัดแต่ละอันอย่างไร
ตรวจสอบความเข้าใจของคุณ
ก่อนที่จะเริ่มบทเรียนต่อไปตรวจสอบให้แน่ใจว่าคุณเข้าใจแนวคิดที่ครอบคลุมในบทเรียนนี้โดยการตอบคำถามในเอกสารด้านล่างในสมุดบันทึกวิศวกรรมของคุณ
ตรวจสอบคำถามเกี่ยวกับความเข้าใจของ คุณ > (Google Doc/.docx /.pdf)
เลือก ถัดไป > เพื่อเรียนรู้วิธีรวบรวมพิกัดโดยใช้การเคลื่อนไหวด้วยตนเอง