
Bài 3: Hệ tọa độ của cánh tay 6 trục
Trong Bài học này, bạn sẽ tìm hiểu về hệ tọa độ Descartes được sử dụng với Cánh tay robot 6 trục.
Vào cuối Bài học này, bạn sẽ sử dụng hiểu biết của mình về hệ tọa độ Descartes và mối quan hệ của nó với Cánh tay 6 trục để ước tính tọa độ của ba vị trí Ô CTE.
Hệ tọa độ Descartes
Để di chuyển Cánh tay 6 trục trong không gian, chúng ta cần có một khung tham chiếu chung để Cánh tay 6 trục có thể di chuyển đến vị trí mong muốn. Cánh tay 6 trục sử dụng hệ tọa độ Descartes để xác định vị trí cuối của Cánh tay 6 trục.
Trục X, Y và Z
Hệ tọa độ là một lưới giá trị toán học. Có nhiều loại hệ tọa độ khác nhau, nhưng hệ tọa độ Descartes được sử dụng với Cánh tay 6 trục. Đây còn được gọi là hệ thống 3D (có chiều) vì ba chiều của nó là trục x, y và z.
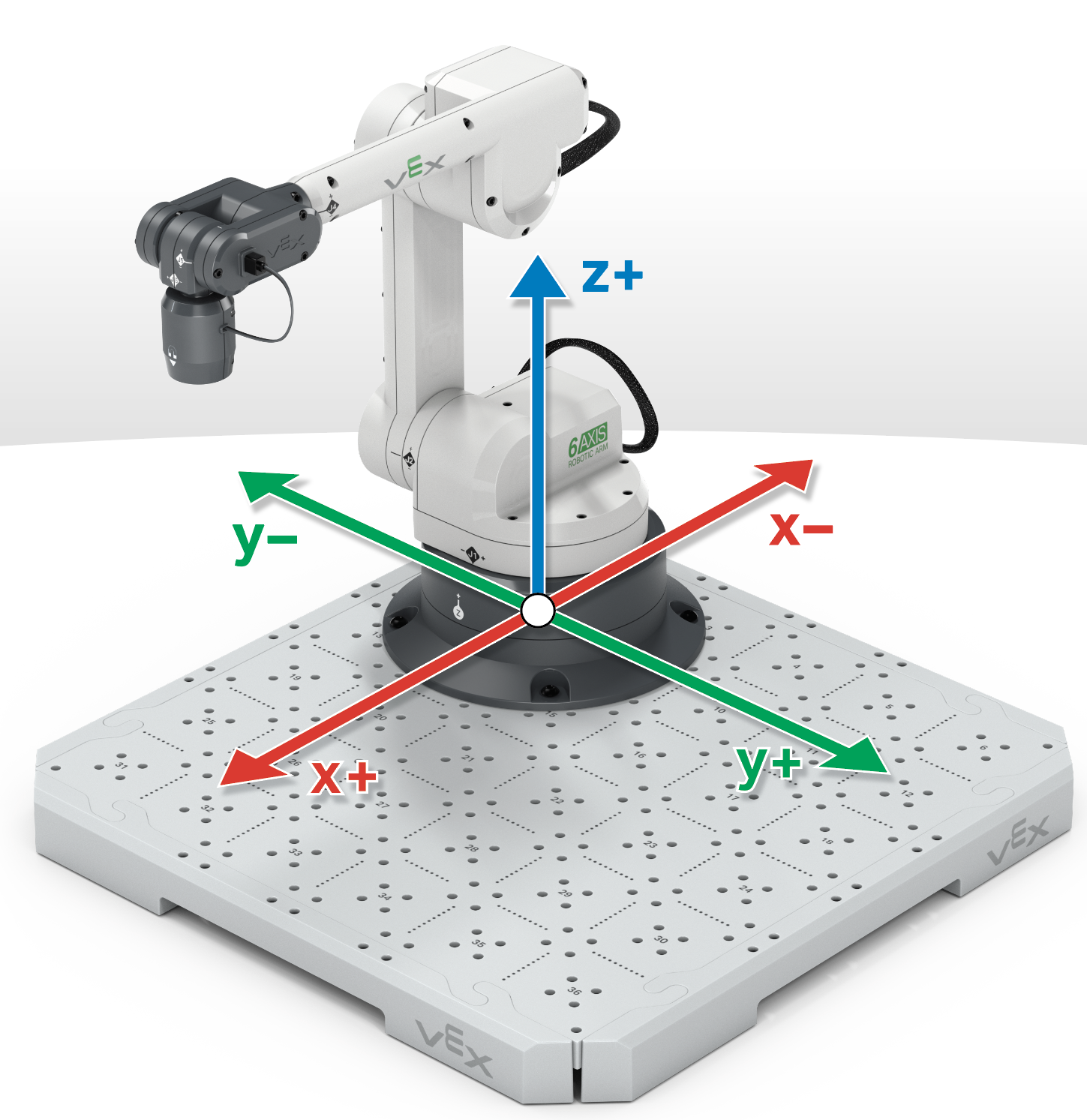
Trục x có thể được thể hiện bằng cách di chuyển Cánh tay 6 trục về phía đế (thu lại) và ra xa đế (mở rộng), như minh họa trong hình ảnh động này.
Trục y có thể được thể hiện bằng cách di chuyển Cánh tay 6 trục sang trái và phải của đế, như minh họa trong hình ảnh động này.
Trục z có thể được thể hiện bằng cách di chuyển Cánh tay 6 trục xuống phía Ngói rồi di chuyển lên ra xa Ngói, như thể hiện trong hình ảnh động này.
Ước tính tọa độ
Tọa độ (x, y, z) được xác định bởi khoảng cách từ tọa độ (0, 0, 0), còn gọi là gốc tọa độ, đến điểm cuối của Cánh tay 6 trục, gọi là Điểm trung tâm công cụ (TCP).
Điểm gốc hoặc (0, 0, 0) là vị trí mà tất cả các giá trị bắt đầu từ đó. (0, 0, 0) trên Cánh tay 6 trục nằm ở tâm của đế.
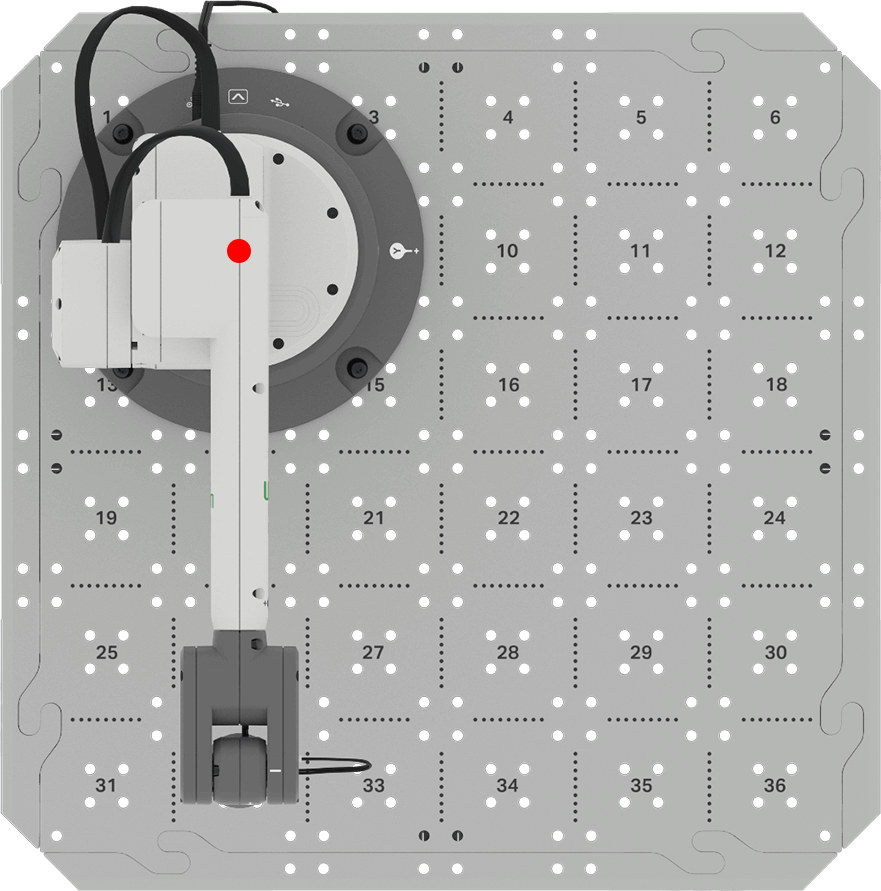
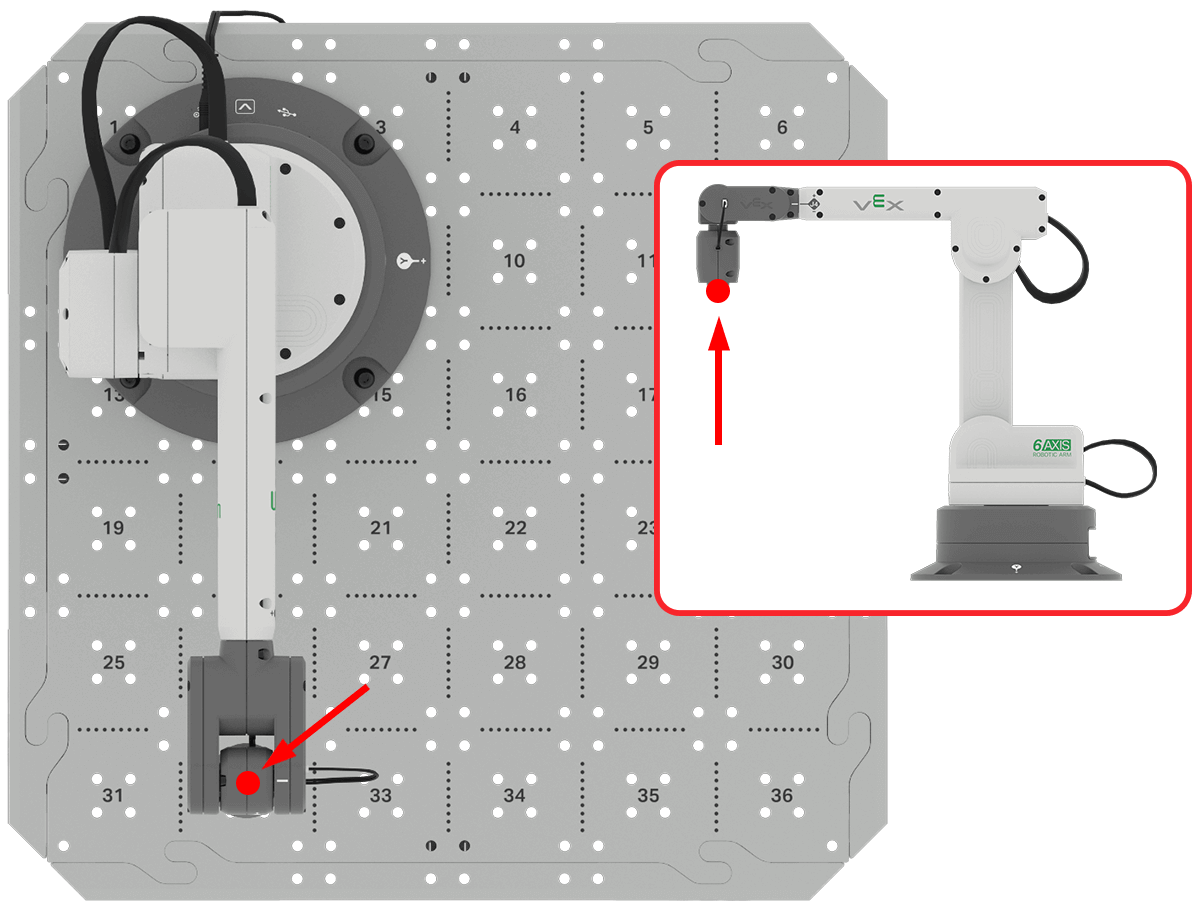
Điểm cuối của cánh tay 6 trục được gọi là Điểm trung tâm dụng cụ (TCP).
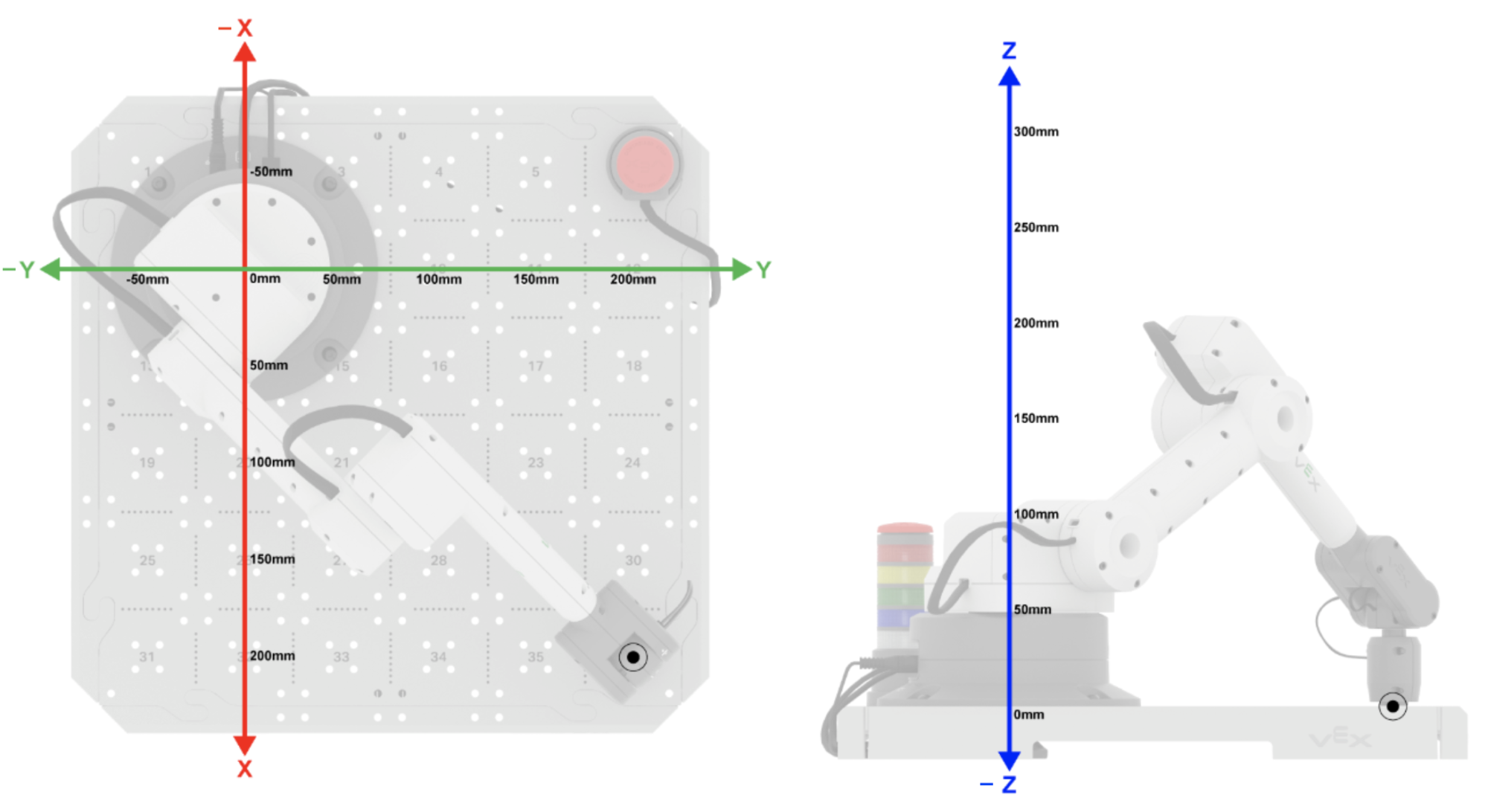
Đối với Cánh tay 6 trục trong hình ảnh này, TCP nằm ở cuối Công cụ thu nam châm.
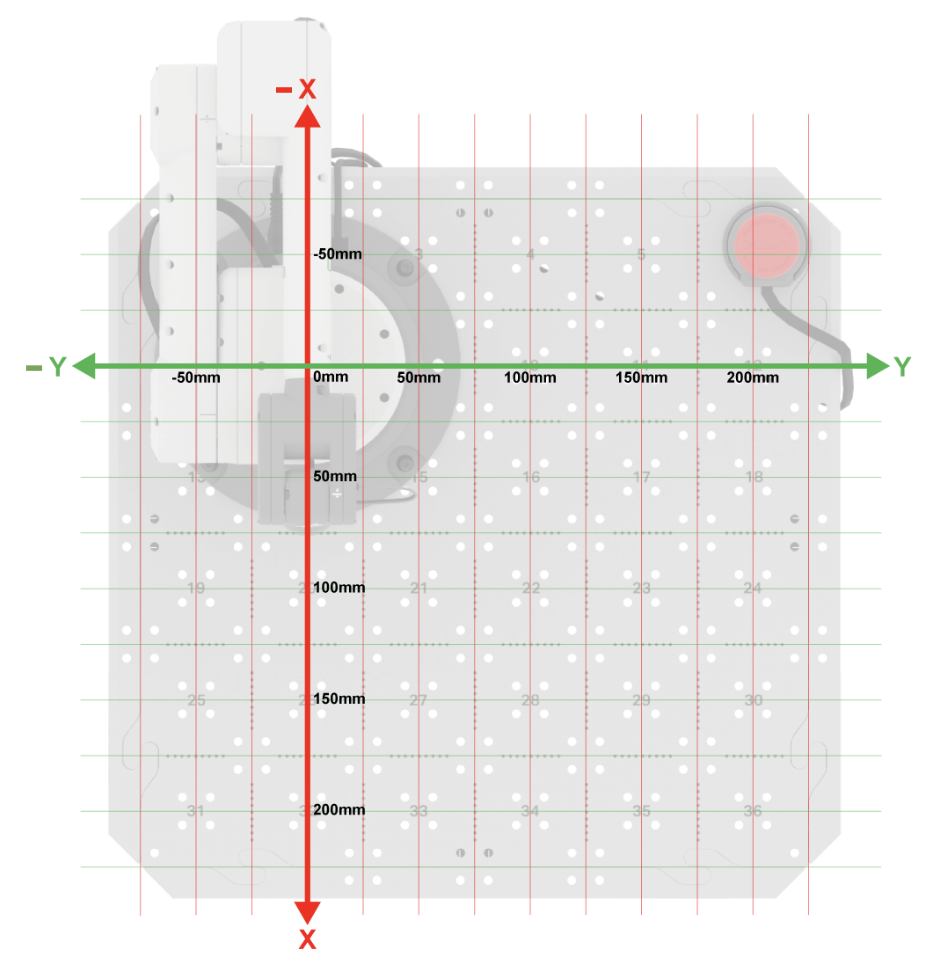
Bạn có thể sử dụng hình ảnh ở đây để xác định tọa độ x, y của Cánh tay 6 trục. Trục z sẽ được hiển thị trong lưới sau.
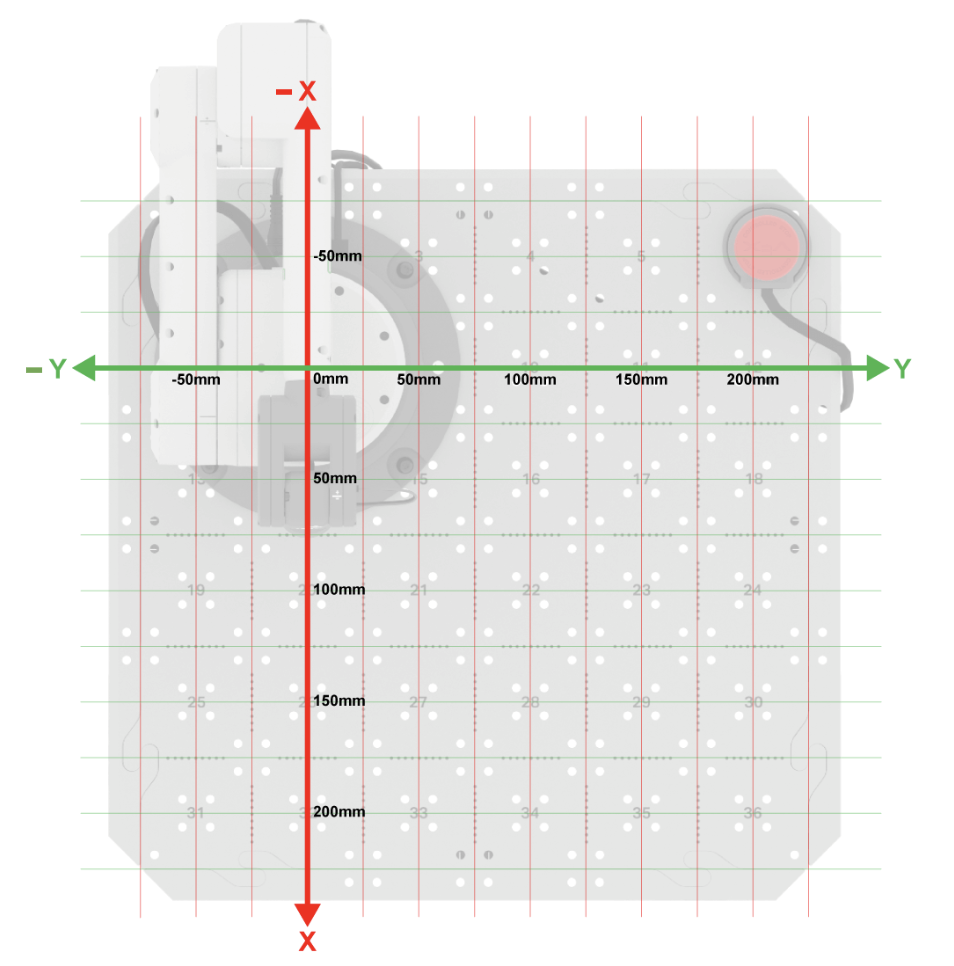
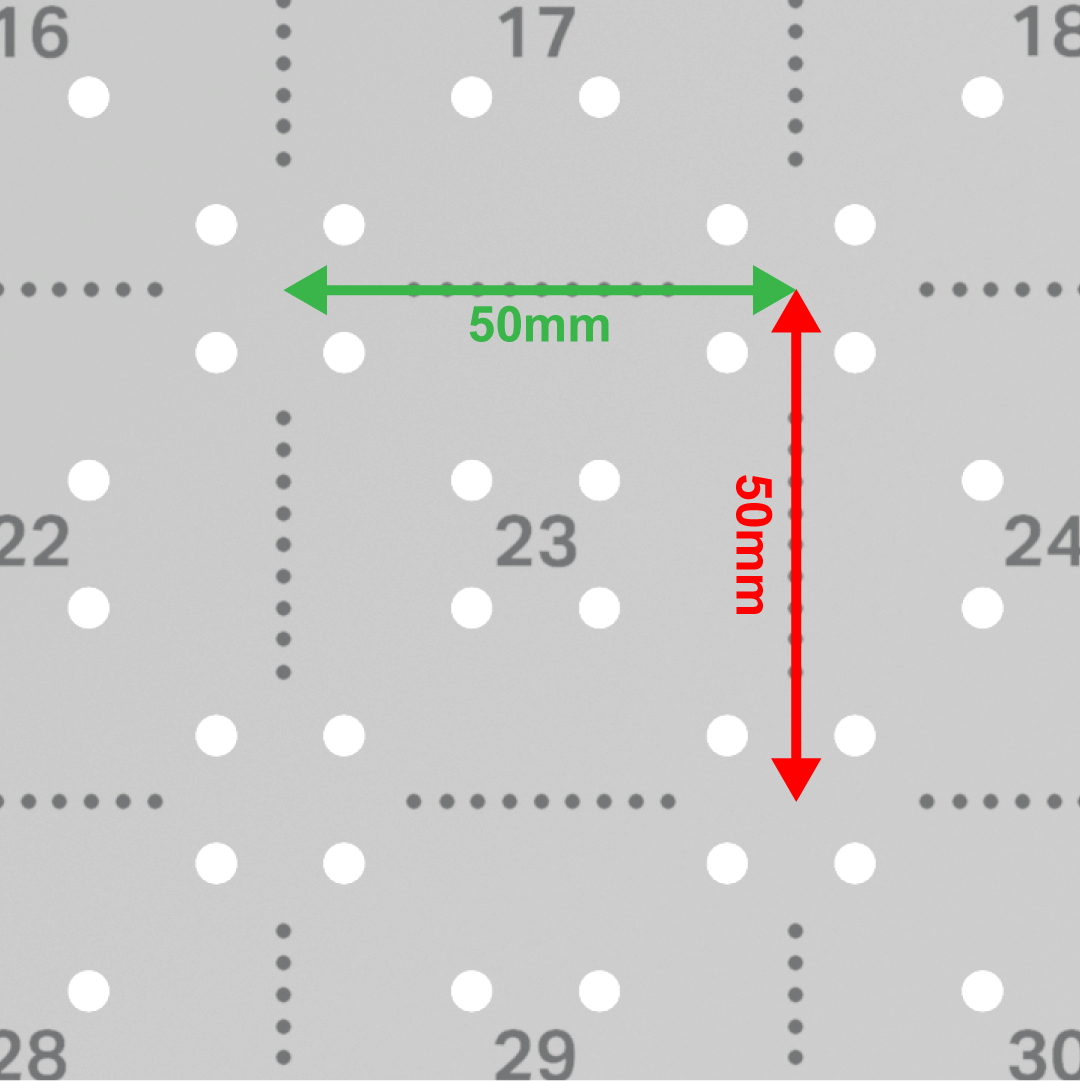
Kích thước của mỗi ô vuông riêng lẻ trên Gạch là 50mm x 50mm.
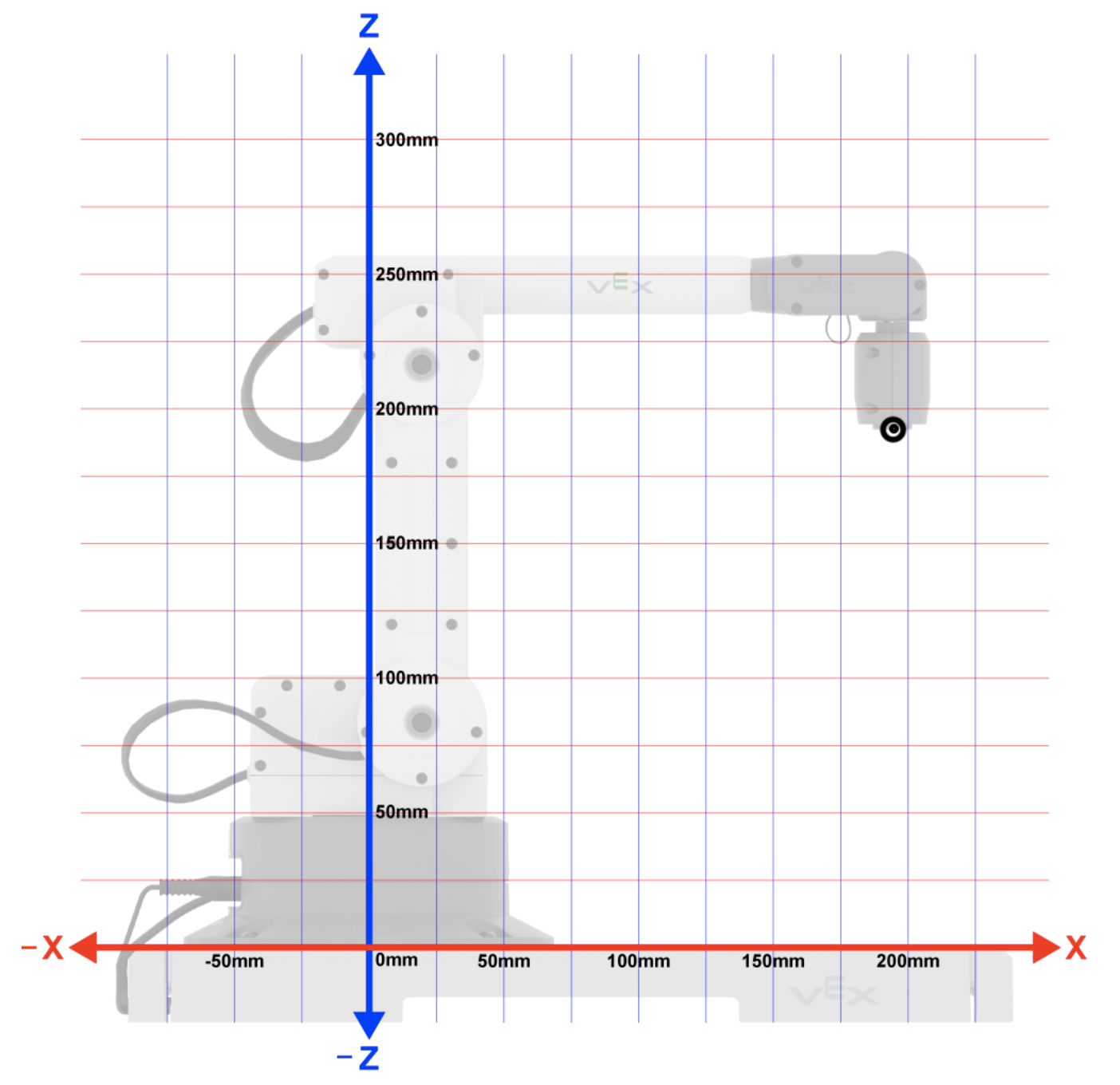
Có thể thu thập giá trị trục z bằng cách xác định khoảng cách từ Tile đến TCP.
Trong ví dụ này, giá trị z của TCP có thể được ước tính chỉ dưới 200mm khi sử dụng lưới tọa độ.
Tọa độ (x, y, z) được xác định bởi khoảng cách (tính bằng milimét) từ gốc đến TCP dọc theo cả ba trục.
Trong ví dụ này, tọa độ (x, y, z) sẽ là (200, 200, 0) vì TCP cách gốc tọa độ trên trục x 200 mm, cách gốc tọa độ trên trục y 200 mm và cách gốc tọa độ trên trục z 0 mm.
Hoạt động
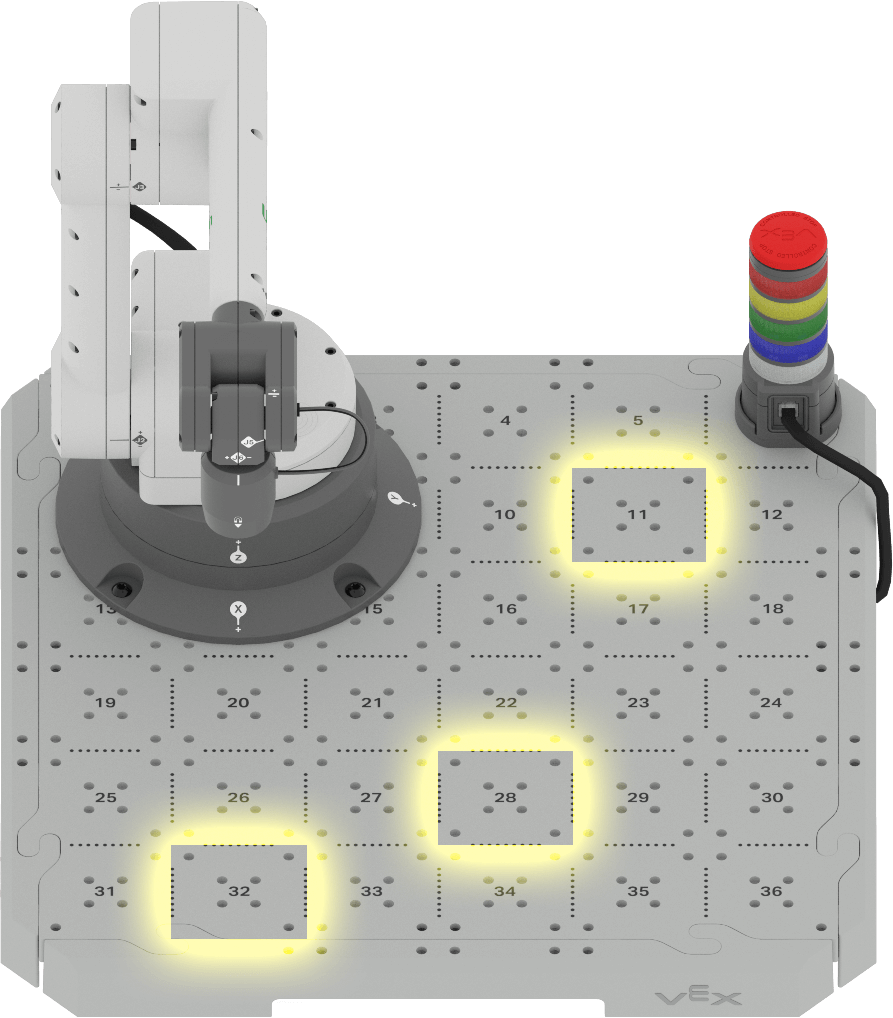
Trước đó trong Bài học này, chúng ta đã thảo luận về hệ tọa độ Descartes và cách xác định tọa độ dựa trên khoảng cách từ gốc đến TCP. Trong hoạt động này, bạn sẽ xác định tọa độ của ba vị trí Ngói.
- Ước tính tọa độ (x, y, z) của các vị trí Ngói sau. Giả sử rằng Cánh tay 6 trục chạm vào từng vị trí của Ô và tọa độ z là 0 mm.
- Vị trí ô 11
- Vị trí ô 32
- Vị trí ô 28
- Ghi lại những tọa độ này vào sổ tay kỹ thuật của bạn. Giải thích cách bạn xác định từng tọa độ.
Kiểm tra sự hiểu biết của bạn
Trước khi bắt đầu Bài học tiếp theo, hãy đảm bảo rằng bạn hiểu các khái niệm được đề cập trong Bài học này bằng cách trả lời các câu hỏi trong tài liệu bên dưới trong sổ tay kỹ thuật của bạn.
Kiểm tra câu hỏi hiểu biết của bạn > (Google Doc / .docx / .pdf)
Chọn Tiếp theo > để tìm hiểu cách thu thập tọa độ bằng cách sử dụng chuyển động thủ công.