
পাঠ ৩: ৬-অক্ষ বাহুর স্থানাঙ্ক ব্যবস্থা
এই পাঠে, আপনি 6-অক্ষ রোবোটিক আর্মের সাথে ব্যবহৃত কার্টেসিয়ান স্থানাঙ্ক ব্যবস্থা সম্পর্কে শিখবেন।
এই পাঠের শেষে, আপনি কার্টেসিয়ান স্থানাঙ্ক ব্যবস্থা এবং 6-অক্ষ বাহুর সাথে এর সম্পর্ক সম্পর্কে আপনার বোধগম্যতা ব্যবহার করে তিনটি CTE টাইল অবস্থানের স্থানাঙ্ক অনুমান করবেন।

কার্টেসিয়ান স্থানাঙ্ক ব্যবস্থা
৬-অক্ষ বাহুকে মহাকাশে স্থানান্তরিত করার জন্য, আমাদের একটি সাধারণ রেফারেন্স ফ্রেম থাকা প্রয়োজন যাতে ৬-অক্ষ বাহুটি পছন্দসই স্থানে যেতে পারে। ৬-অক্ষ বাহুর শেষ প্রান্তটি কোথায় অবস্থিত তা নির্ধারণ করার জন্য ৬-অক্ষ বাহুর কার্টেসিয়ান স্থানাঙ্ক ব্যবস্থা ব্যবহার করা হয়।
X, Y, এবং Z-অক্ষ
একটি স্থানাঙ্ক ব্যবস্থা হল মানগুলির একটি গাণিতিক গ্রিড। বিভিন্ন ধরণের স্থানাঙ্ক ব্যবস্থা রয়েছে, তবে কার্টেসিয়ান স্থানাঙ্ক ব্যবস্থা 6-অক্ষ বাহুর সাথে ব্যবহৃত হয়। এটি একটি 3D (মাত্রিক) সিস্টেম নামেও পরিচিত, কারণ এর তিনটি মাত্রা হল x, y এবং z-অক্ষ।

এই অ্যানিমেশনে দেখানো হয়েছে, 6-অক্ষ বাহুটিকে বেসের দিকে (প্রত্যাহার করা) এবং বেস থেকে দূরে (বর্ধিত) সরিয়ে x-অক্ষটি প্রদর্শন করা যেতে পারে।
এই অ্যানিমেশনে দেখানো হয়েছে, 6-অক্ষ বাহুটিকে বেসের বাম এবং ডানে সরানোর মাধ্যমে y-অক্ষটি প্রদর্শন করা যেতে পারে।
এই অ্যানিমেশনে দেখানো হয়েছে, 6-অক্ষের বাহুটিকে টাইলের দিকে নীচে এবং তারপর টাইলের থেকে উপরে সরিয়ে z-অক্ষটি প্রদর্শন করা যেতে পারে।
স্থানাঙ্ক অনুমান করা
(x, y, z) স্থানাঙ্কটি (0, 0, 0) স্থানাঙ্ক, যাকে উৎপত্তিও বলা হয়, থেকে 6-অক্ষ বাহুর শেষ প্রান্ত, যাকে টুল সেন্টার পয়েন্ট (TCP) বলা হয়, দূরত্ব দ্বারা নির্ধারিত হয়।
উৎপত্তিস্থল অথবা (0, 0, 0) হলো সেই অবস্থান যেখান থেকে সকল মান শুরু হয়। ৬-অক্ষ বাহুর (০, ০, ০) বেসের কেন্দ্রে অবস্থিত।
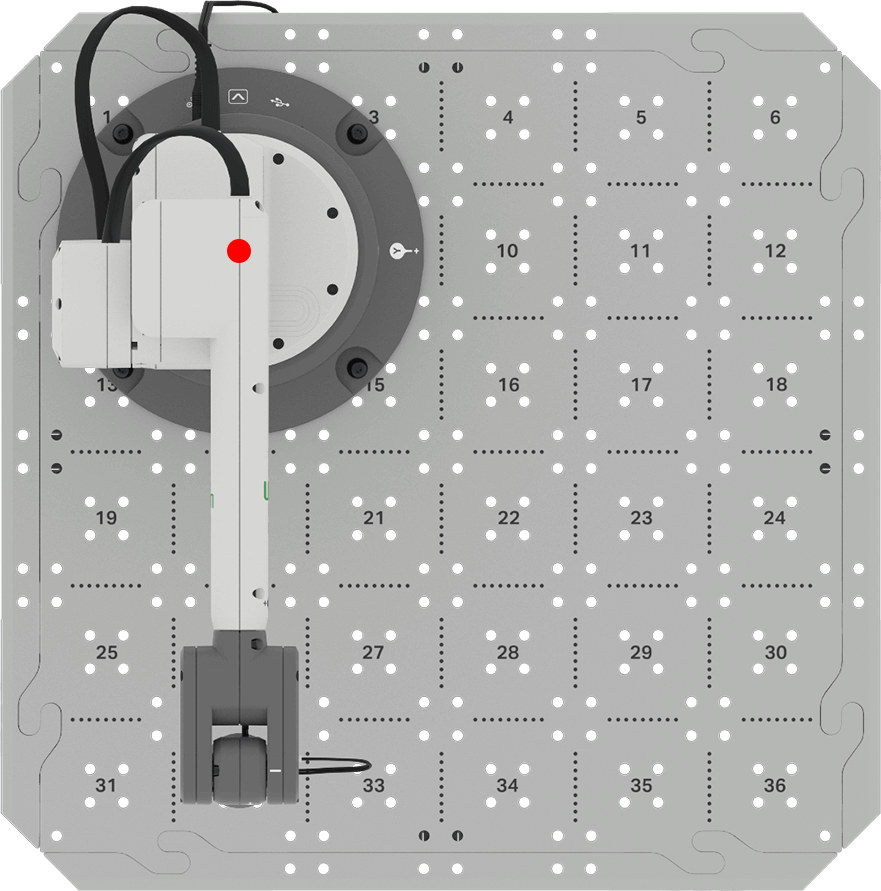
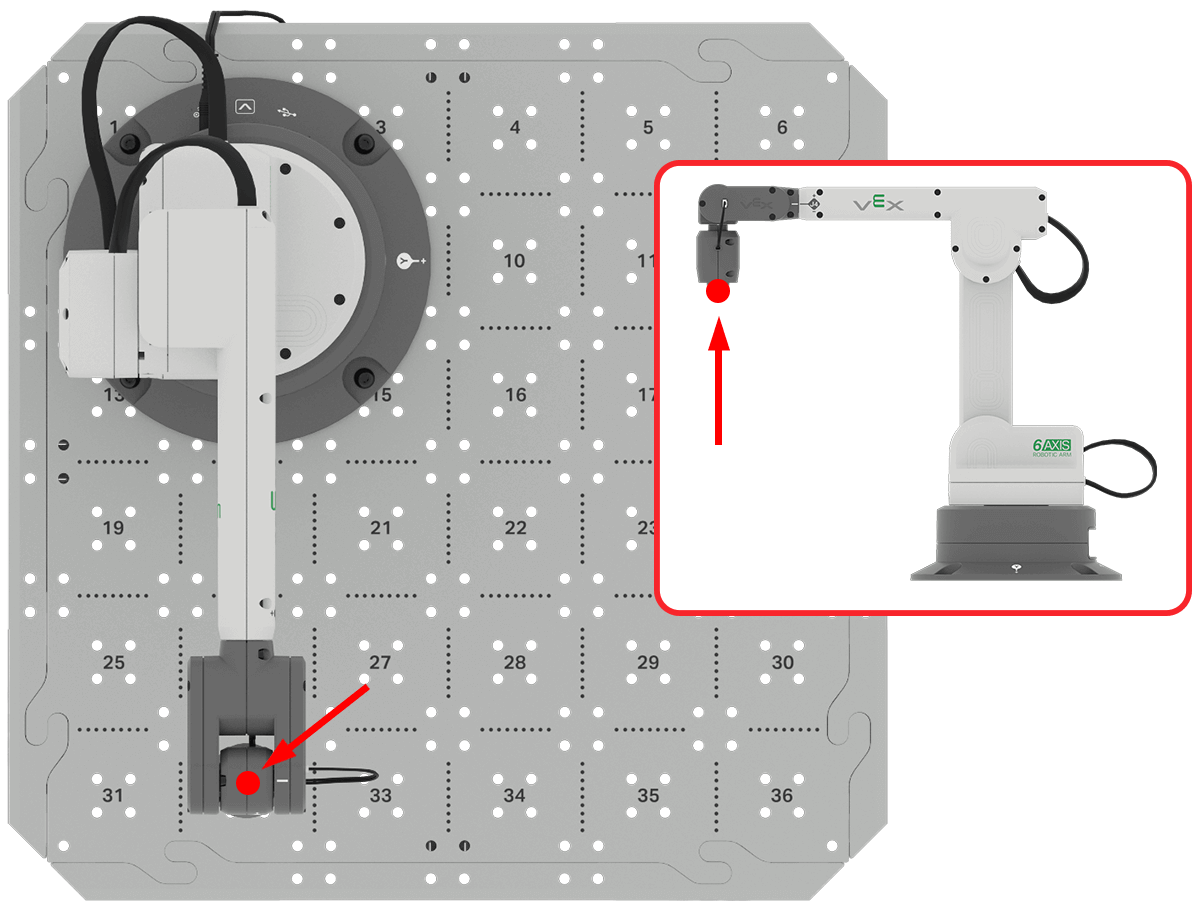
৬-অক্ষ বাহুর শেষ প্রান্তটি টুল সেন্টার পয়েন্ট (TCP) নামে পরিচিত।
এই ছবিতে 6-অক্ষ বাহুর জন্য, TCP ম্যাগনেট পিকআপ টুলের শেষে রয়েছে।
৬-অক্ষ বাহুর x, y-স্থানাঙ্ক নির্ধারণে সাহায্য করার জন্য আপনি এখানে চিত্রটি ব্যবহার করতে পারেন। z-অক্ষটি নিম্নলিখিত গ্রিডে দেখানো হবে।

টাইলের প্রতিটি পৃথক বর্গক্ষেত্রের পরিমাপ ৫০ মিমি বাই ৫০ মিমি।

টাইল থেকে TCP এর দূরত্ব নির্ধারণ করে z-অক্ষের মান সংগ্রহ করা যেতে পারে।
এই উদাহরণে, স্থানাঙ্ক গ্রিড ব্যবহার করে TCP-এর z-মান 200mm-এর সামান্য কম অনুমান করা যেতে পারে।

(x, y, z) স্থানাঙ্কটি তিনটি অক্ষ বরাবর উৎপত্তিস্থল থেকে TCP পর্যন্ত দূরত্ব (মিলিমিটারে) দ্বারা নির্ধারিত হয়।
এই উদাহরণে, (x, y, z) স্থানাঙ্ক হবে (200, 200, 0) কারণ TCP x-অক্ষের উৎপত্তিস্থল থেকে 200 মিমি, y-অক্ষের উৎপত্তিস্থল থেকে 200 মিমি এবং z-অক্ষের উৎপত্তিস্থল থেকে 0 মিমি দূরে।

কার্যকলাপ
পূর্বে এই পাঠে, আমরা কার্টেসিয়ান স্থানাঙ্ক ব্যবস্থা এবং উৎপত্তিস্থল থেকে TCP-এর দূরত্বের উপর ভিত্তি করে স্থানাঙ্ক কীভাবে নির্ধারণ করতে হয় তা নিয়ে আলোচনা করেছি। এই কার্যকলাপে, আপনি তিনটি টাইল অবস্থানের স্থানাঙ্ক নির্ধারণ করবেন।
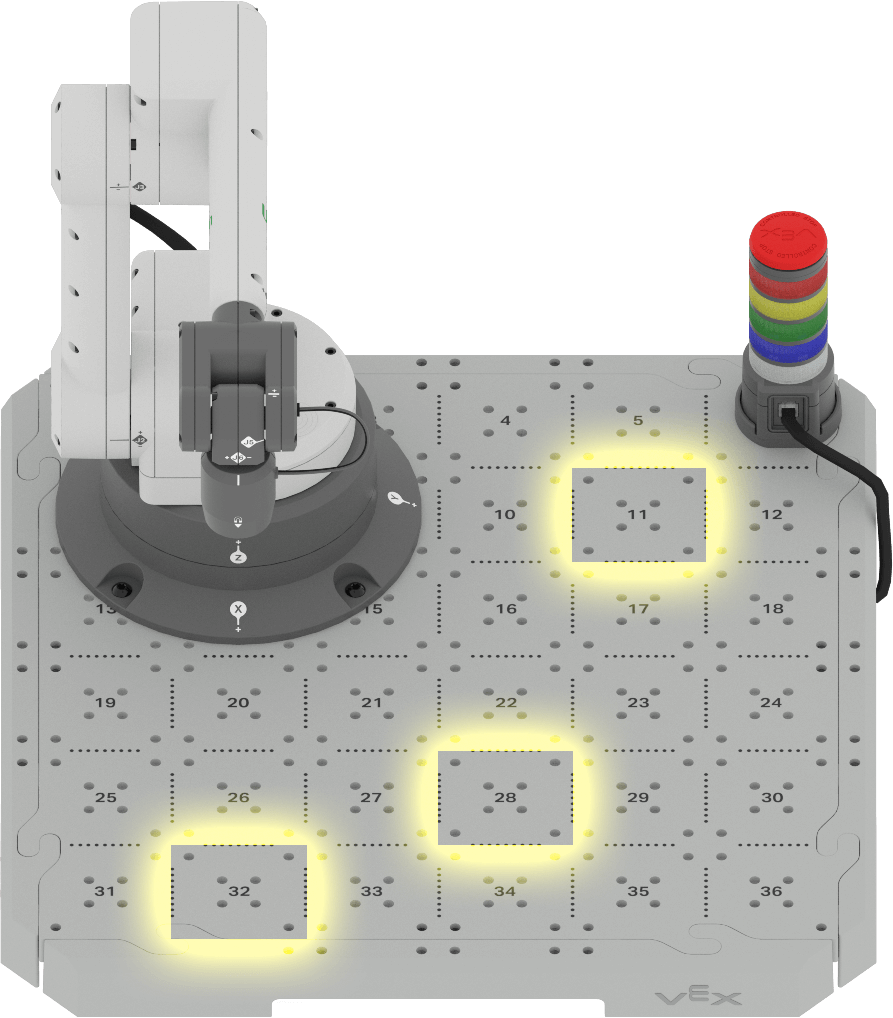
- নিম্নলিখিত টাইল অবস্থানগুলির (x, y, z) স্থানাঙ্ক অনুমান করুন। ধরে নিন যে 6-অক্ষ বাহুটি প্রতিটি টাইল অবস্থান স্পর্শ করছে এবং z-স্থানাঙ্ক 0 মিমি।
- টাইলের অবস্থান ১১
- টাইলের অবস্থান ৩২
- টাইলের অবস্থান ২৮
- এই স্থানাঙ্কগুলি আপনার ইঞ্জিনিয়ারিং নোটবুকে লিপিবদ্ধ করুন। আপনি প্রতিটি স্থানাঙ্ক কীভাবে নির্ধারণ করেছেন তা ব্যাখ্যা করুন।
তোমার বোধগম্যতা পরীক্ষা করো
পরবর্তী পাঠ শুরু করার আগে, আপনার ইঞ্জিনিয়ারিং নোটবুকে নীচের নথিতে থাকা প্রশ্নের উত্তর দিয়ে নিশ্চিত করুন যে আপনি এই পাঠে অন্তর্ভুক্ত ধারণাগুলি বুঝতে পেরেছেন।
আপনার বোঝার প্রশ্নগুলি পরীক্ষা করুন > (Google Doc / .docx / .pdf)
ম্যানুয়াল মুভমেন্ট ব্যবহার করে স্থানাঙ্ক সংগ্রহ করতে শিখতে পরবর্তী > নির্বাচন করুন।