
In questa lezione, imparerai a conoscere il sistema di coordinate cartesiane utilizzato con il braccio robotico a 6 assi.
Alla fine di questa lezione, utilizzerai la tua comprensione del sistema di coordinate cartesiane e della sua relazione con il braccio a 6 assi per stimare le coordinate di tre posizioni delle piastrelle CTE.
Sistema di coordinate cartesiane
Per spostare il braccio a 6 assi nello spazio, è necessario disporre di un quadro di riferimento comune in modo che il braccio a 6 assi possa spostarsi nella posizione desiderata. Il braccio a 6 assi utilizza il sistema di coordinate cartesiane per determinare dove si trova l'estremità del braccio a 6 assi.
Assi X, Y e Z
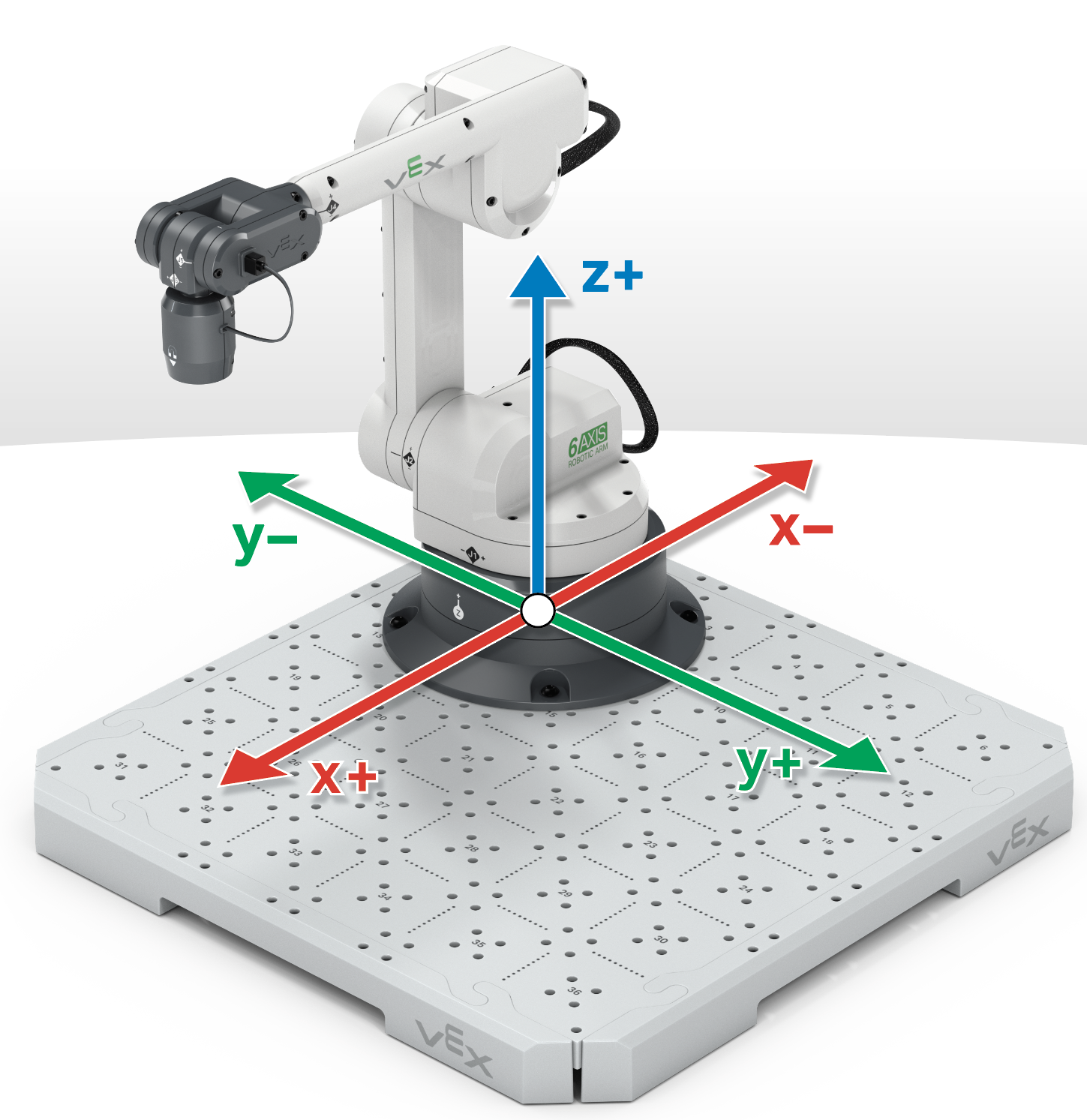
Un sistema di coordinate è una griglia matematica di valori. Esistono diversi tipi di sistemi di coordinate, ma il sistema di coordinate cartesiane viene utilizzato con il braccio a 6 assi. Questo è anche noto come sistema 3D (dimensionale), poiché le sue tre dimensioni sono gli assi x, y e z.
L'asse x può essere dimostrato spostando il braccio a 6 assi verso la base (retratto) e lontano dalla base (esteso).
L'asse y può essere dimostrato spostando il braccio a 6 assi a sinistra e a destra della base.
L'asse z può essere dimostrato spostando il braccio a 6 assi verso il basso verso la piastrella e poi verso l'alto lontano dalla piastrella.
Stima delle coordinate
La coordinata (x, y, z) è determinata dalla distanza dalla coordinata (0, 0, 0), chiamata anche origine, alla fine del braccio a 6 assi, chiamato punto centrale utensile (TCP).
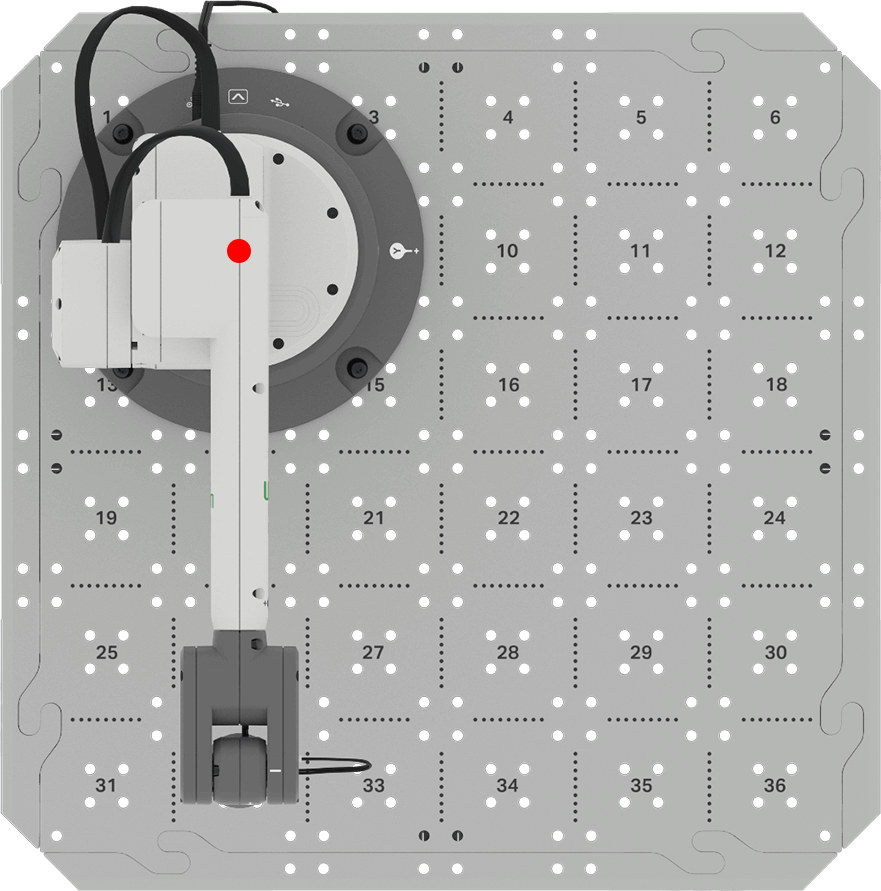
L'origine o (0, 0, 0) è la posizione da cui partono tutti i valori. Il (0, 0, 0) sul braccio a 6 assi si trova al centro della base.
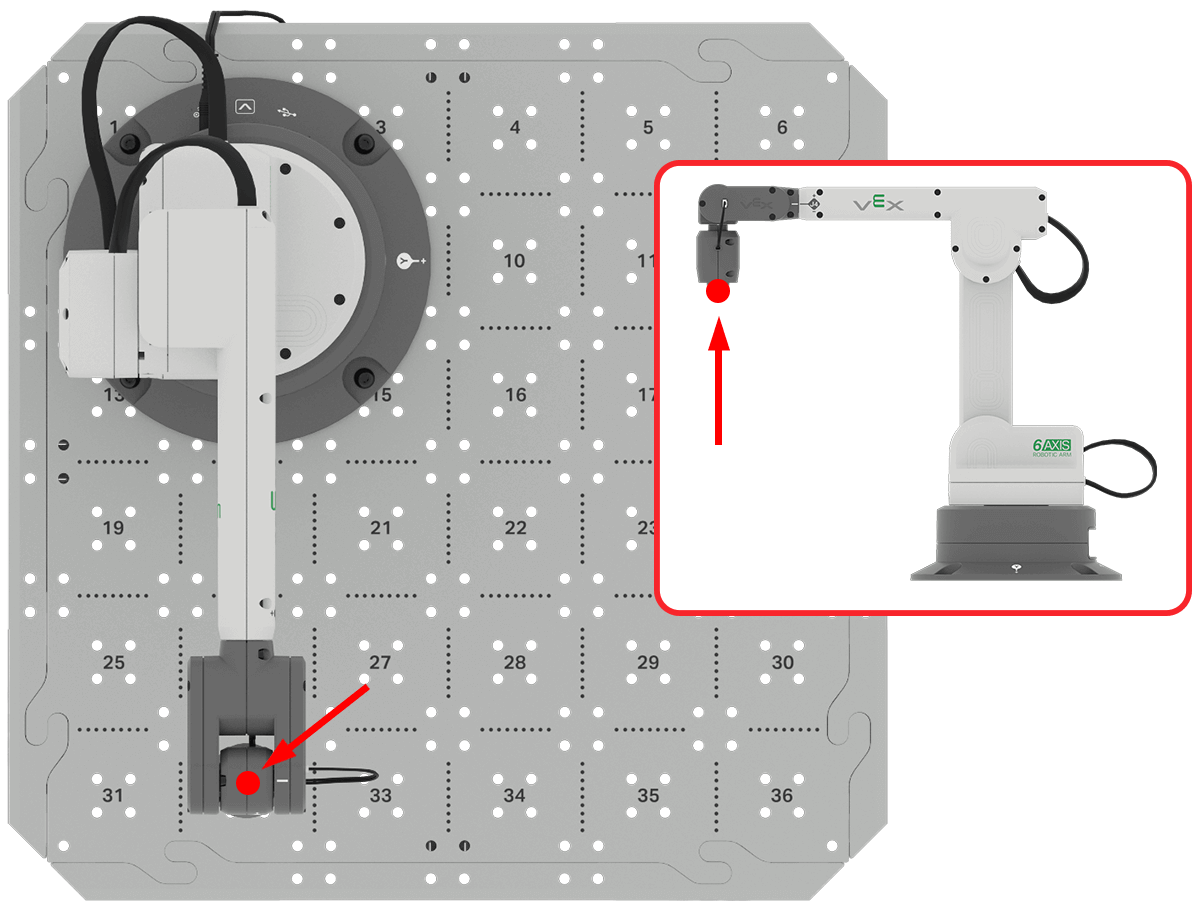
L'estremità del braccio a 6 assi è nota come Tool Center Point (TCP).
Per il braccio a 6 assi in questa immagine, il TCP si trova alla fine dello strumento di prelievo del magnete.
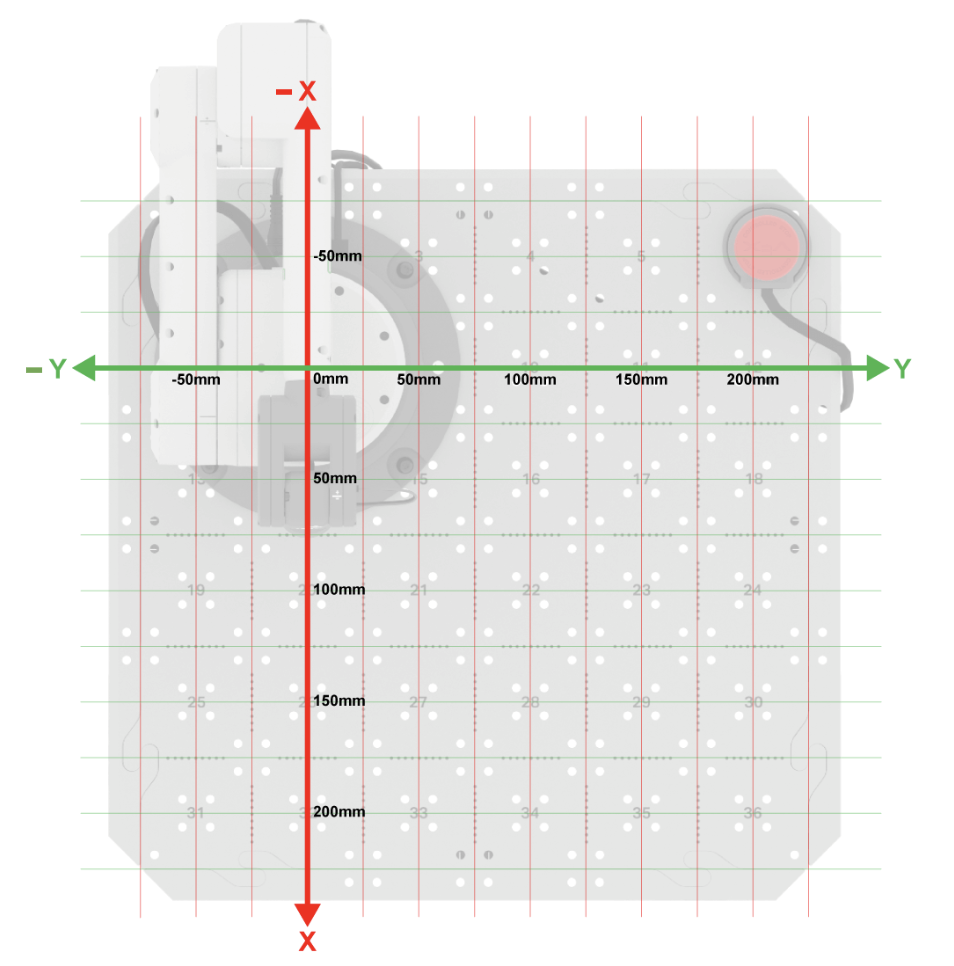
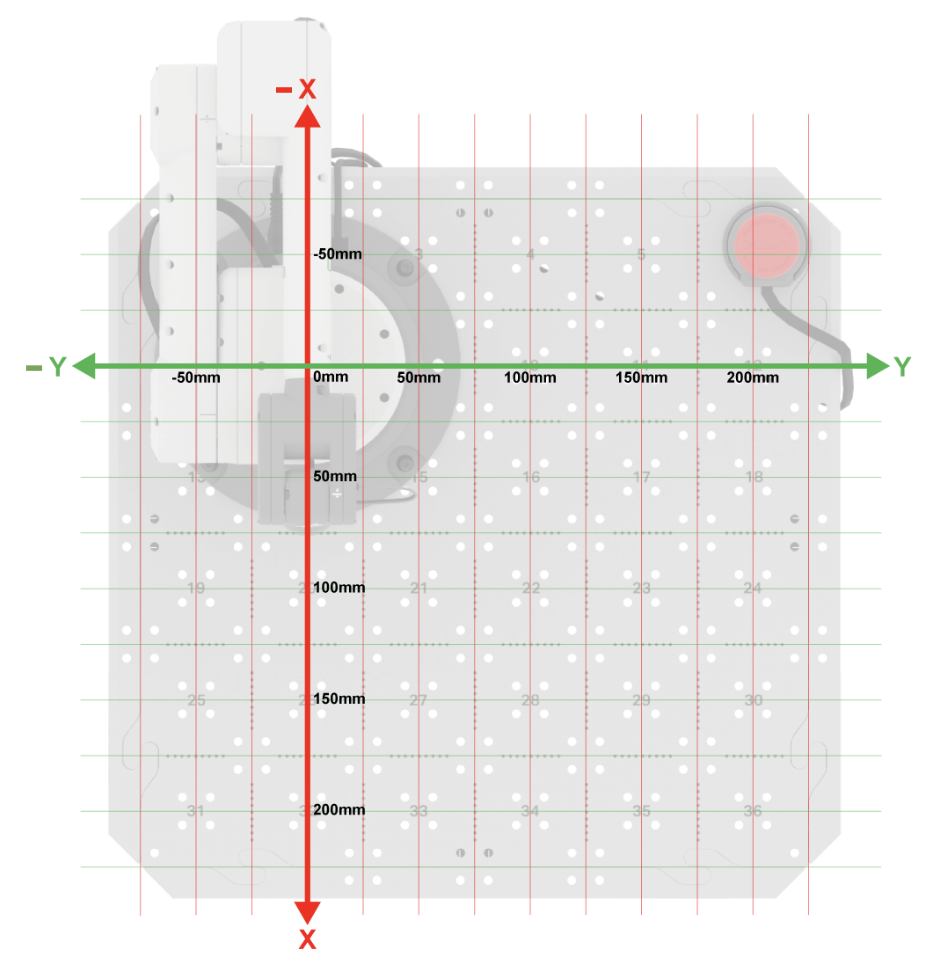
È possibile utilizzare l'immagine qui per aiutare a determinare le coordinate x, y del braccio a 6 assi. L'asse z verrà mostrato in una griglia seguente.
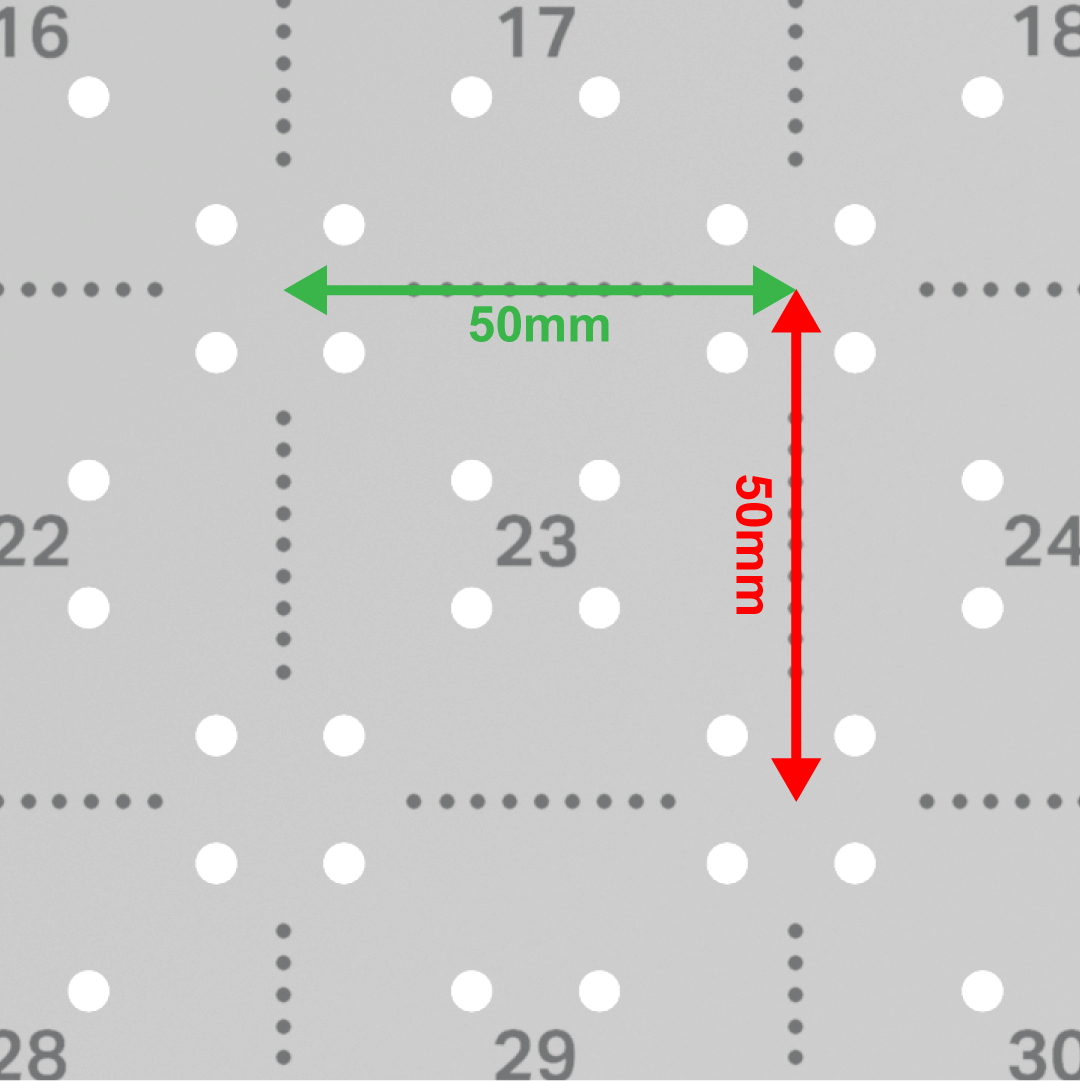
La misura di ciascuno dei singoli quadrati sulla piastrella è di 50 mm per 50 mm.
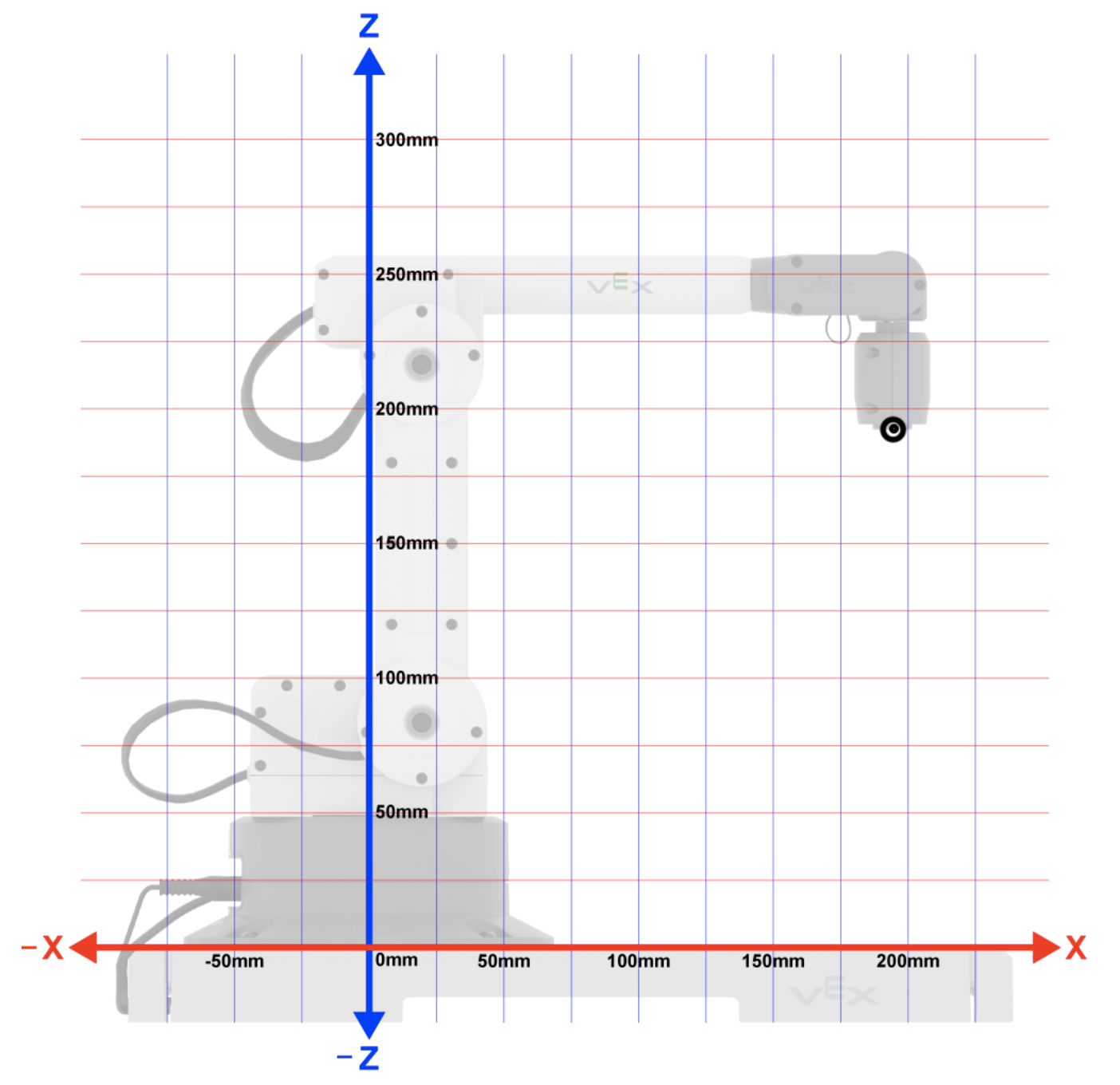
La raccolta del valore dell'asse z può essere effettuata determinando la distanza dalla Piastrella al TCP.
In questo esempio, il valore z del TCP può essere stimato a poco meno di 200 mm utilizzando la griglia di coordinate.
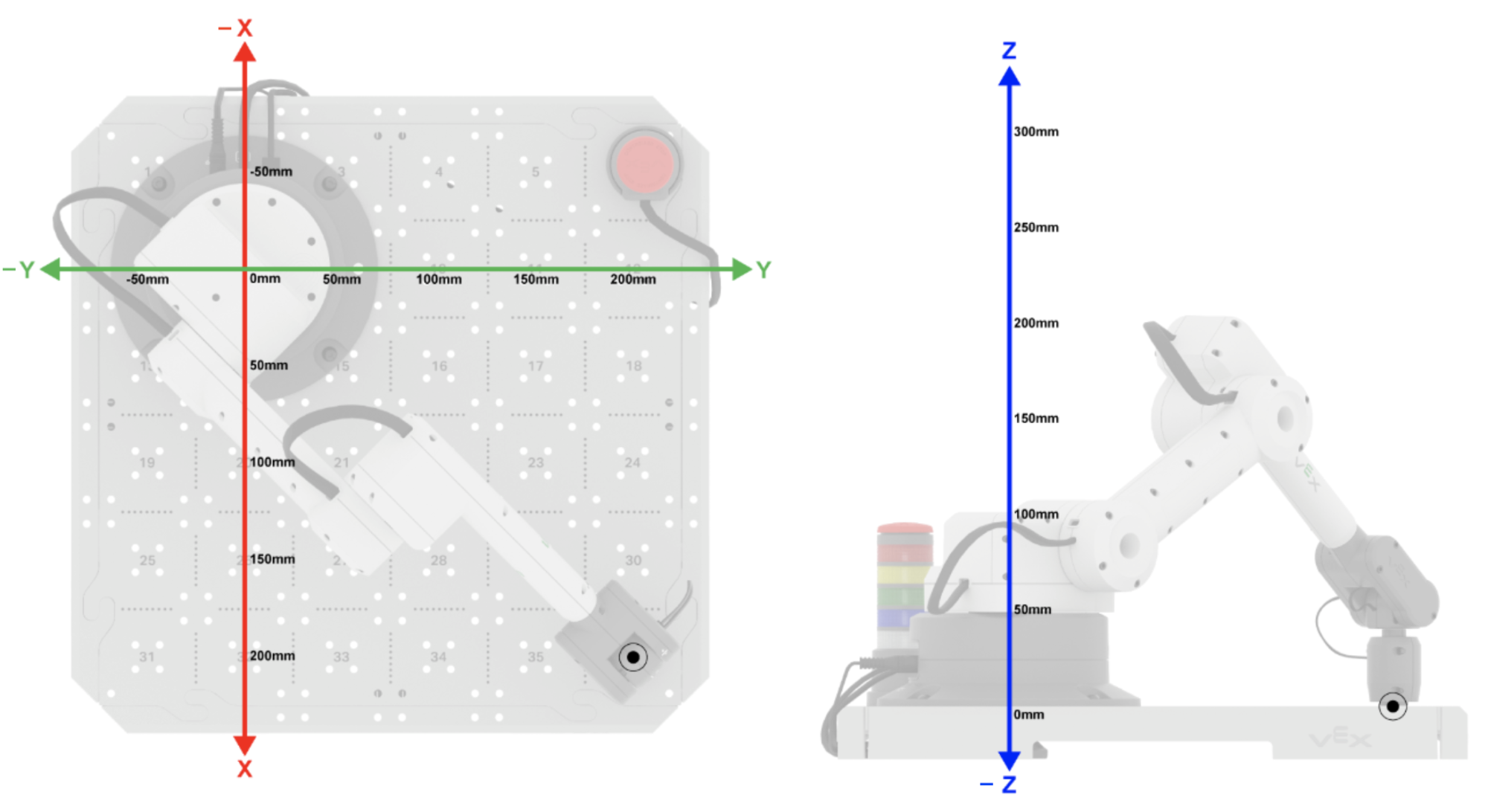
La coordinata (x, y, z) è determinata dalla distanza (in millimetri) dall'origine al TCP lungo tutti e tre gli assi.
In questo esempio, la coordinata (x, y, z) sarebbe (200, 200, 0) perché il TCP è 200 mm dall'origine nell'asse x, 200 mm dall'origine nell'asse y e 0 mm dall'origine nell'asse z.
Attività
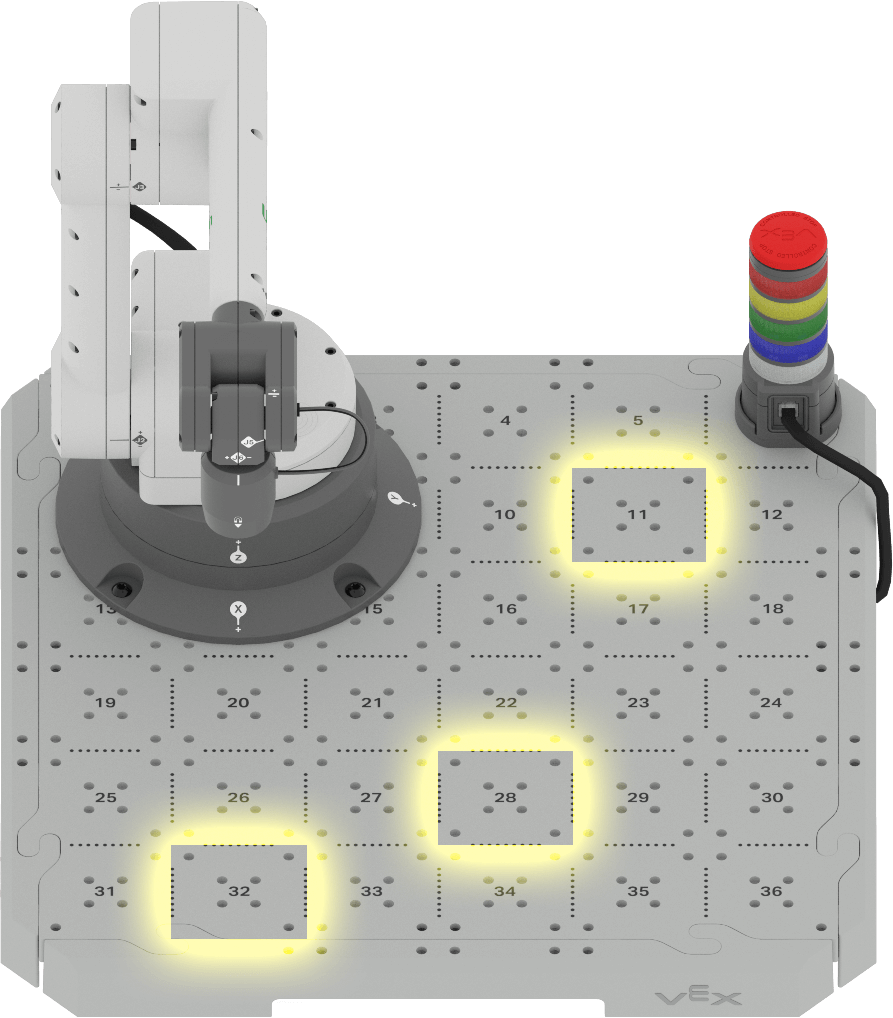
In precedenza, in questa lezione, abbiamo discusso il sistema di coordinate cartesiane e come determinare le coordinate in base alla distanza dall'origine al TCP. In questa attività, determinerai le coordinate di tre posizioni delle tessere.
- Stima le coordinate (x, y, z) delle seguenti posizioni delle tessere. Si supponga
che il braccio a 6 assi tocchi ciascuna posizione delle piastrelle e che la coordinata z
sia 0 mm.
- Posizione piastrelle 11
- Posizione piastrelle 32
- Posizione piastrelle 28
- Registra queste coordinate nel tuo quaderno di ingegneria. Spiega come hai determinato ogni coordinata.
Verifica la tua comprensione
Prima di iniziare la lezione successiva, assicurati di comprendere i concetti trattati in questa lezione rispondendo alle domande nel documento seguente nel tuo quaderno di ingegneria.
Domande sulla comprensione > (Google Doc / .docx / .pdf)
Selezionare Avanti > per imparare a raccogliere le coordinate utilizzando i movimenti manuali.