
In dieser Lektion lernen Sie das kartesische Koordinatensystem kennen, das mit dem 6-Achsen-Roboterarm verwendet wird.
Am Ende dieser Lektion verwenden Sie Ihr Verständnis des kartesischen Koordinatensystems und seiner Beziehung zum 6-Achsen-Arm, um die Koordinaten von drei CTE-Kachelpositionen zu schätzen.
Kartesisches Koordinatensystem
Um den 6-Achsen-Arm im Weltraum zu bewegen, benötigen wir einen gemeinsamen Bezugsrahmen, damit sich der 6-Achsen-Arm an die gewünschte Stelle bewegen kann. Der 6-Achsen-Arm verwendet das kartesische Koordinatensystem, um zu bestimmen, wo sich das Ende des 6-Achsen-Arms befindet.
X-, Y- und Z-Achsen
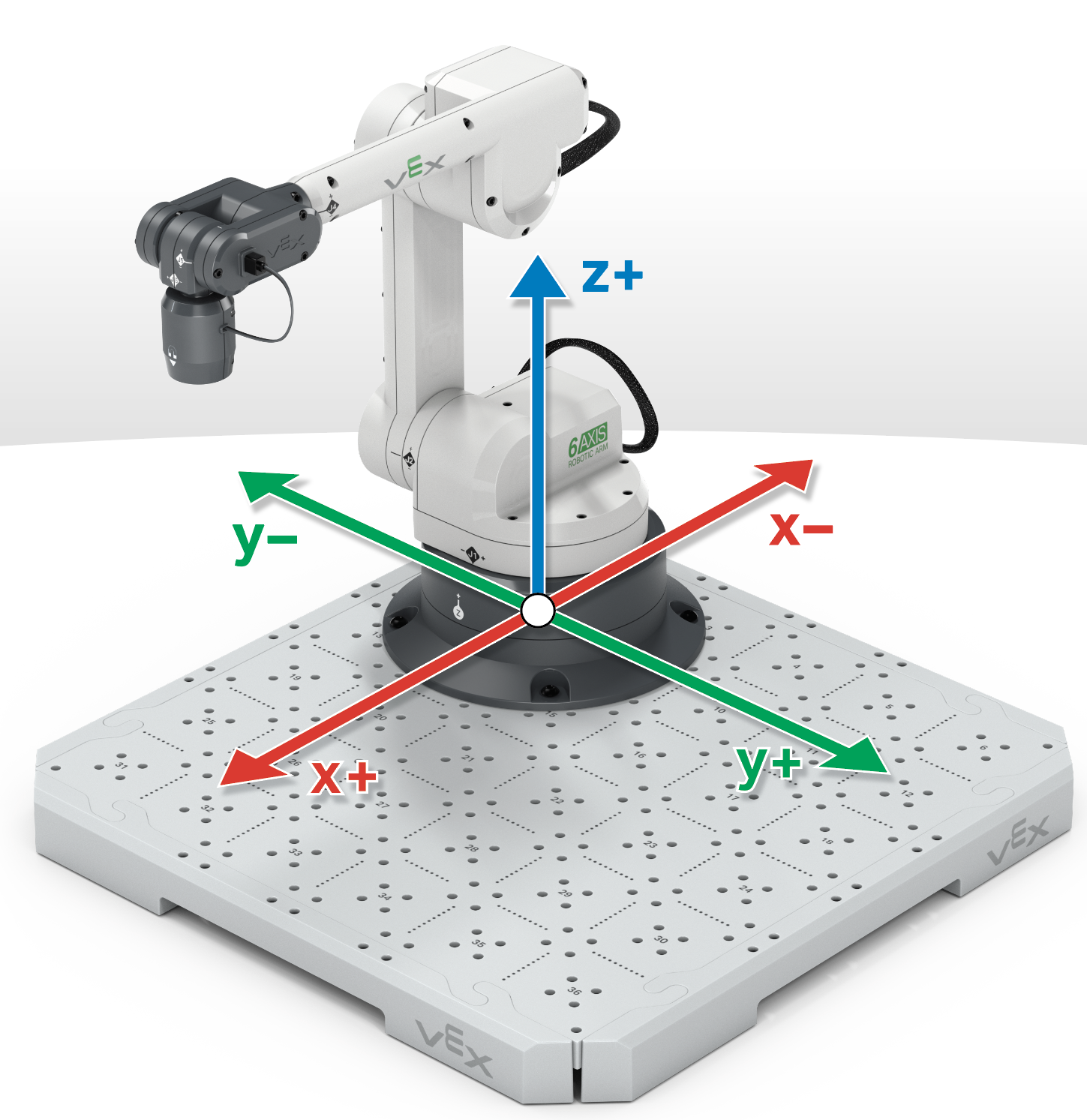
Ein Koordinatensystem ist ein mathematisches Raster von Werten. Es gibt verschiedene Arten von Koordinatensystemen, aber das kartesische Koordinatensystem wird mit dem 6-Achsen-Arm verwendet. Dies wird auch als 3D- (dimensionales) System bezeichnet, da seine drei Dimensionen die x-, y- und z-Achse sind.
Die x-Achse kann demonstriert werden, indem der 6-Achsen-Arm in Richtung der Basis (eingefahren) und weg von der Basis (ausgefahren) bewegt wird.
Die y-Achse kann demonstriert werden, indem der 6-Achsen-Arm nach links und rechts von der Basis bewegt wird.
Die z-Achse kann demonstriert werden, indem der 6-Achsen-Arm nach unten in Richtung der Kachel bewegt und dann von der Kachel weg nach oben bewegt wird.
Schätzen von Koordinaten
Die (x, y, z) -Koordinate wird durch den Abstand von der (0, 0, 0) -Koordinate, auch Ursprung genannt, zum Ende des 6-Achsen-Arms, dem Tool Center Point (TCP), bestimmt.
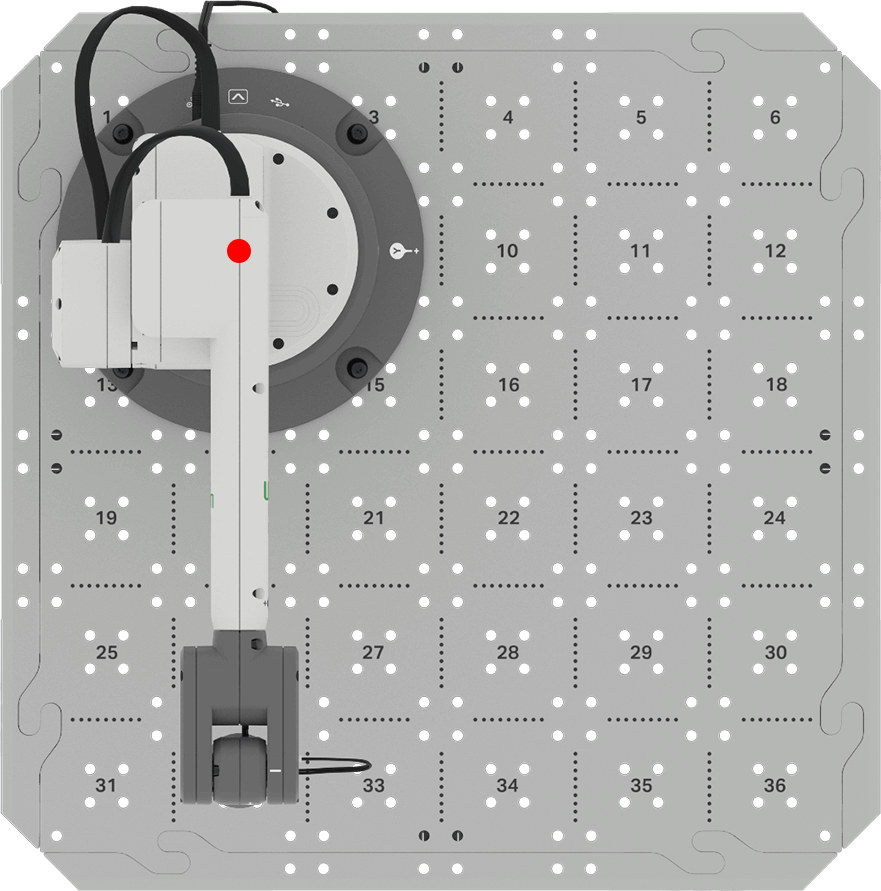
Der Ursprung oder (0, 0, 0) ist der Ort, von dem alle Werte ausgehen. Die (0, 0, 0) am 6-Achsen-Arm befindet sich in der Mitte der Basis.
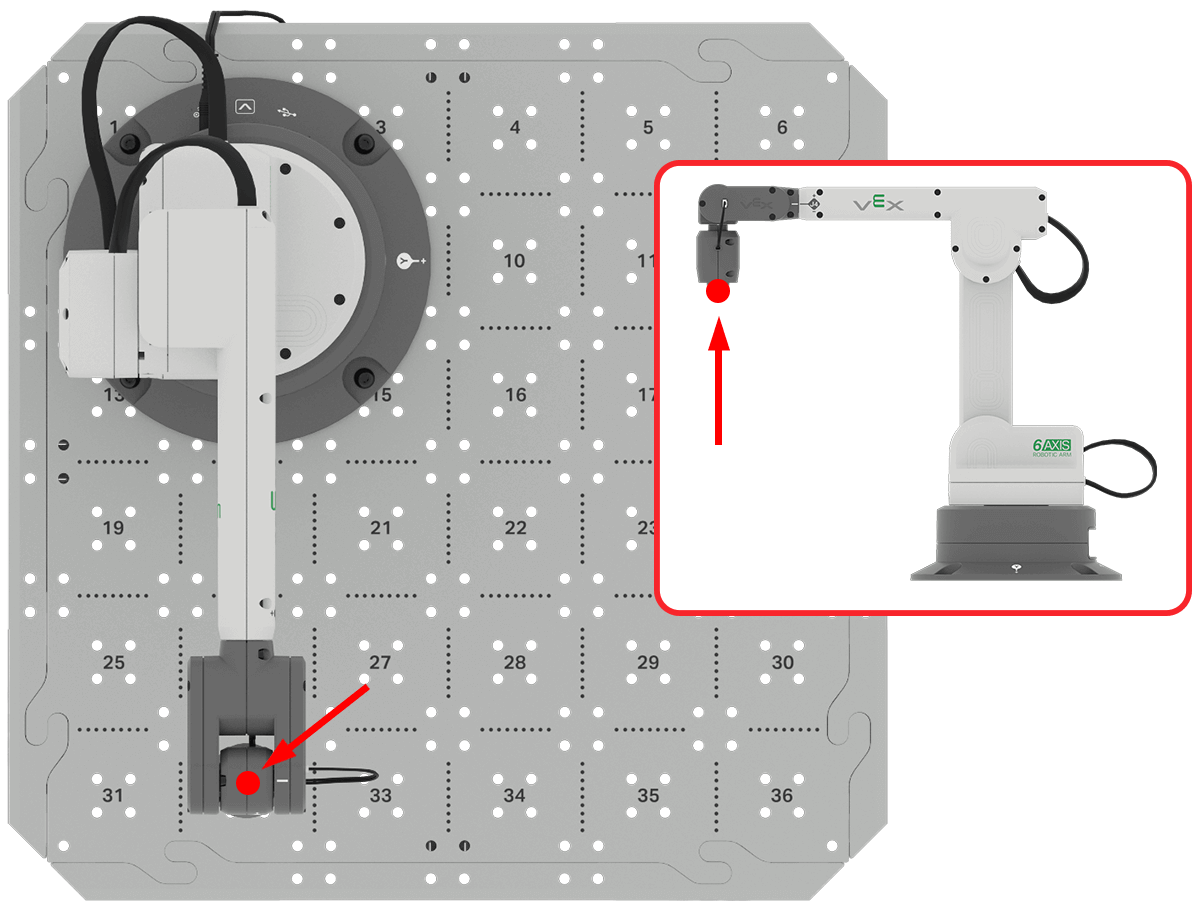
Das Ende des 6-Achsen-Arms wird als Tool Center Point (TCP) bezeichnet.
Für den 6-Achsen-Arm in diesem Bild befindet sich der TCP am Ende des Magnetaufnahmewerkzeugs.
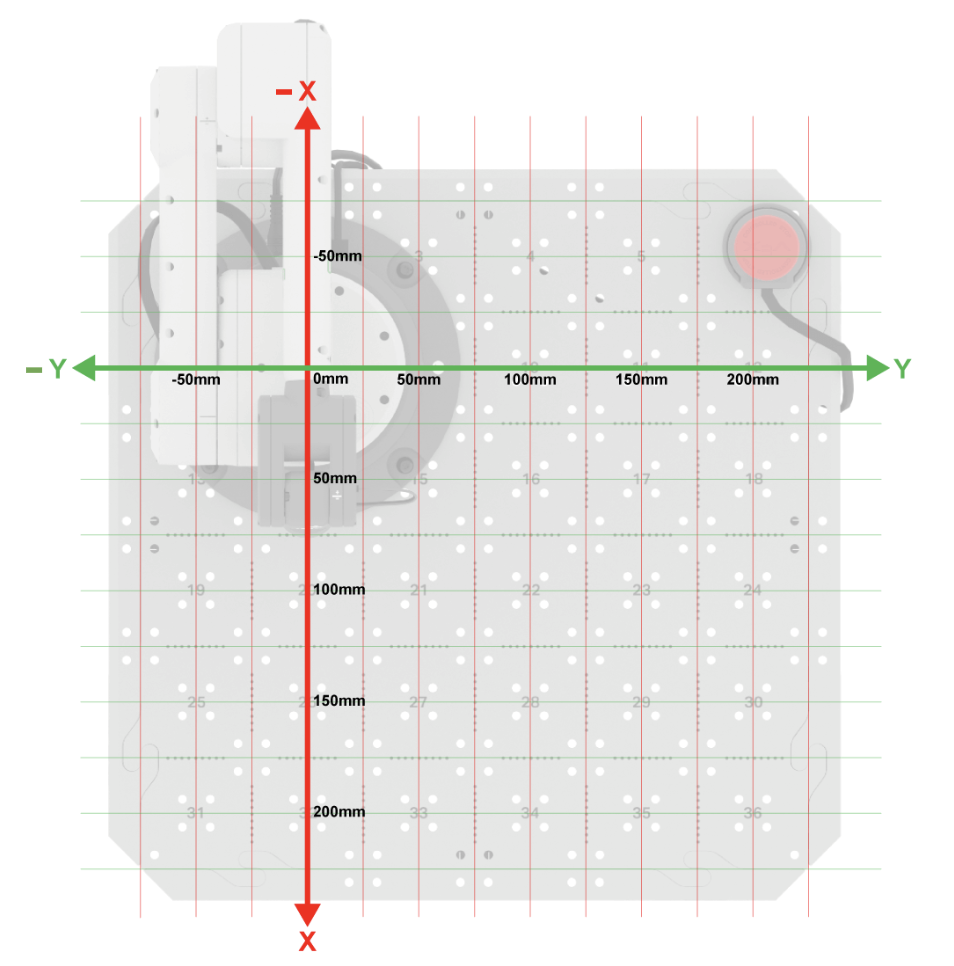
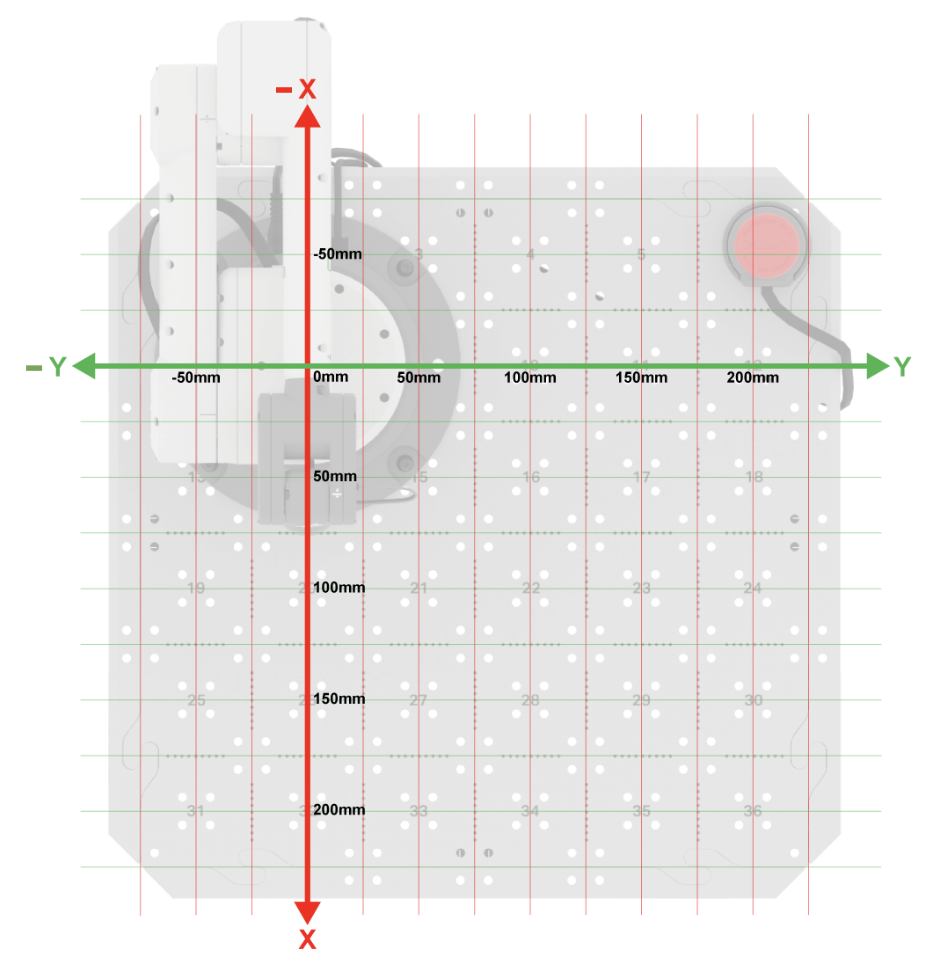
Sie können das Bild hier verwenden, um die x-, y-Koordinaten des 6-Achsen-Arms zu bestimmen. Die z-Achse wird in einem folgenden Raster angezeigt.
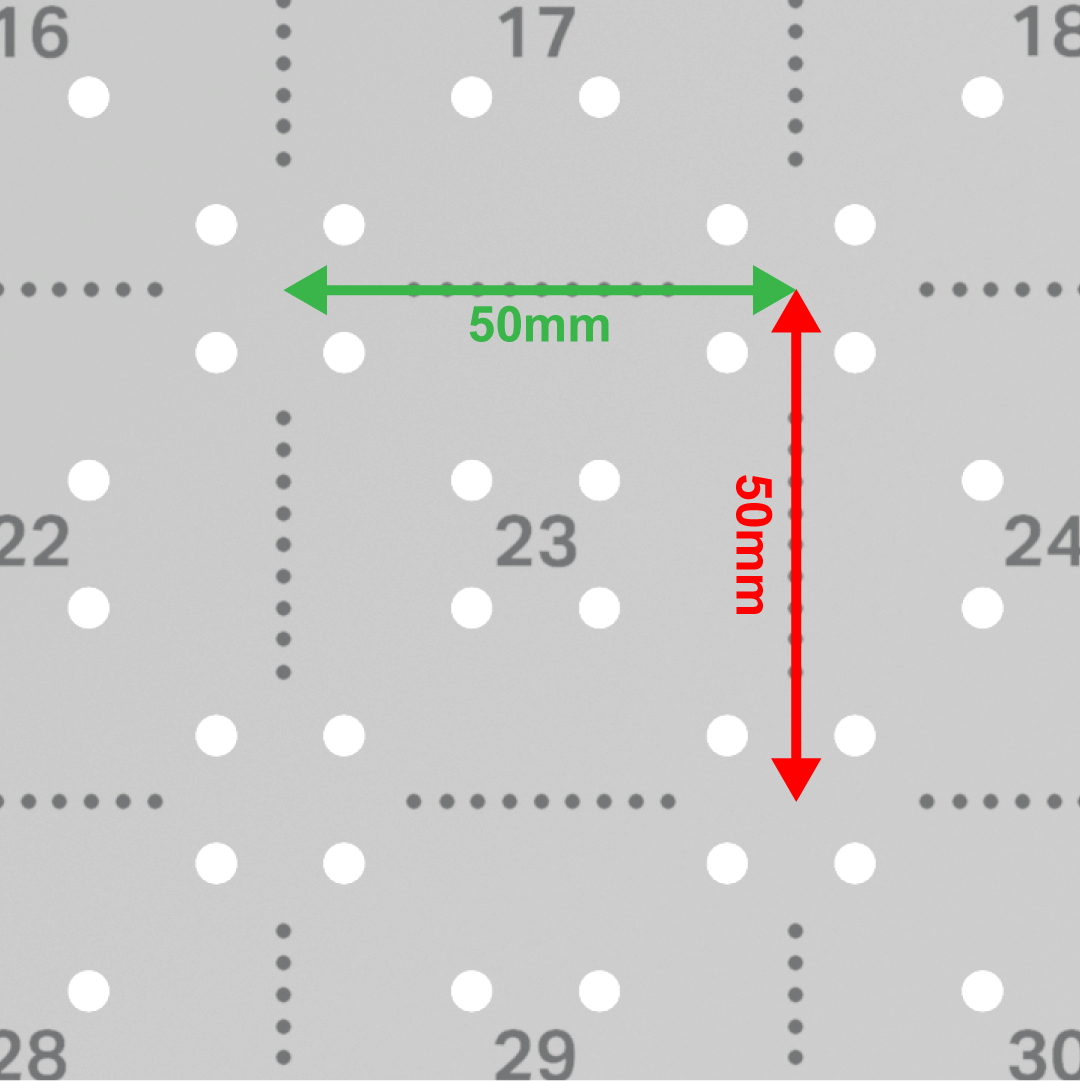
Die Größe jedes der einzelnen Quadrate auf der Kachel beträgt 50 mm mal 50 mm.
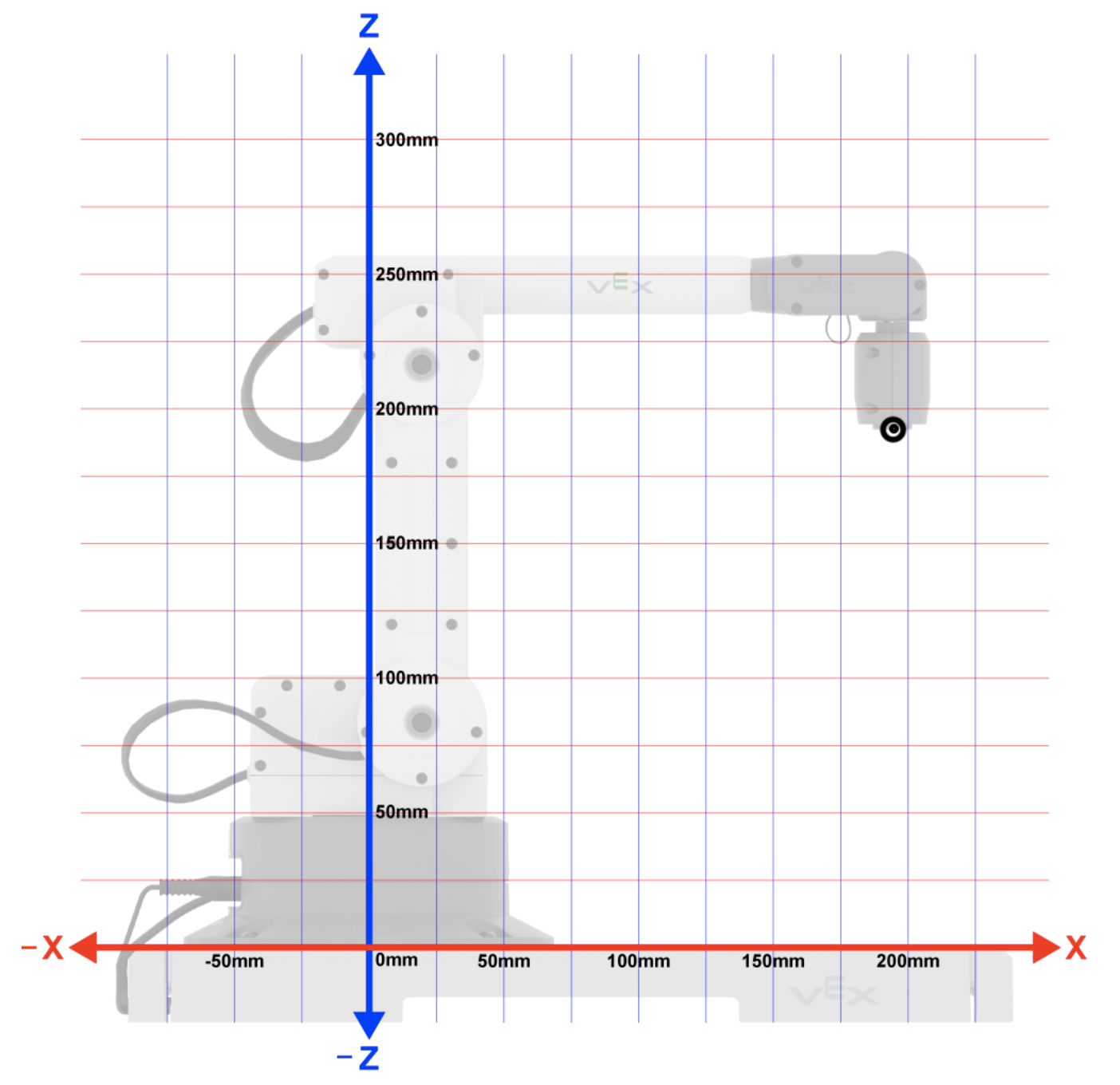
Das Sammeln des z-Achsenwerts kann durch Bestimmen des Abstands von der Kachel zum TCP erfolgen.
In diesem Beispiel kann der z-Wert des TCP mithilfe des Koordinatenrasters auf knapp 200 mm geschätzt werden.
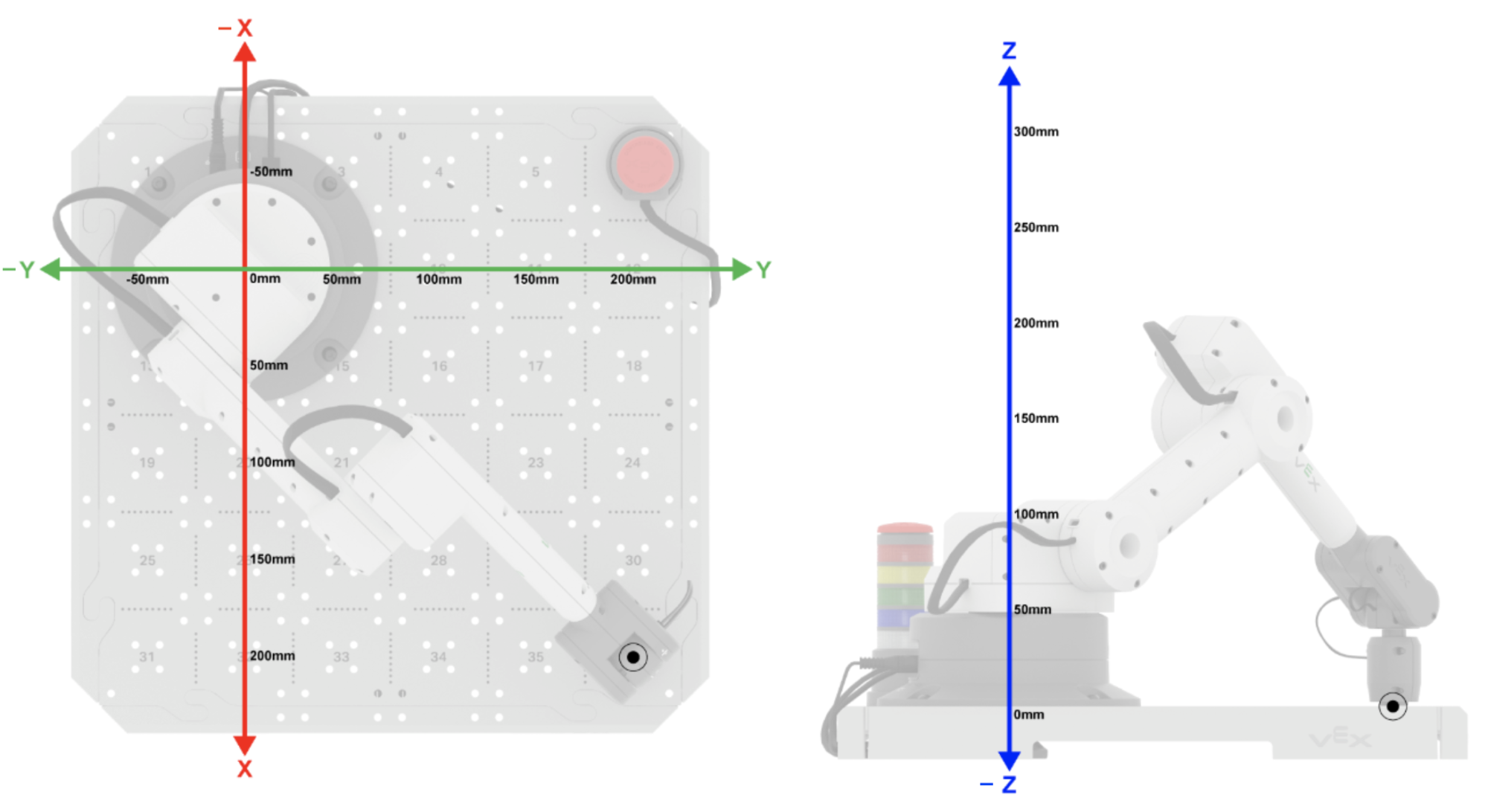
Die (x, y, z) -Koordinate wird durch den Abstand (in Millimetern) vom Ursprung zum TCP entlang aller drei Achsen bestimmt.
In diesem Beispiel wäre die (x, y, z) -Koordinate (200, 200, 0), da der TCP 200 mm vom Ursprung in der x-Achse, 200 mm vom Ursprung in der y-Achse und 0 mm vom Ursprung in der z-Achse entfernt ist.
Aktivität
Zuvor haben wir in dieser Lektion das kartesische Koordinatensystem besprochen und wie man Koordinaten basierend auf dem Abstand vom Ursprung zum TCP bestimmt. In dieser Aktivität bestimmen Sie die Koordinaten von drei Kachelpositionen.
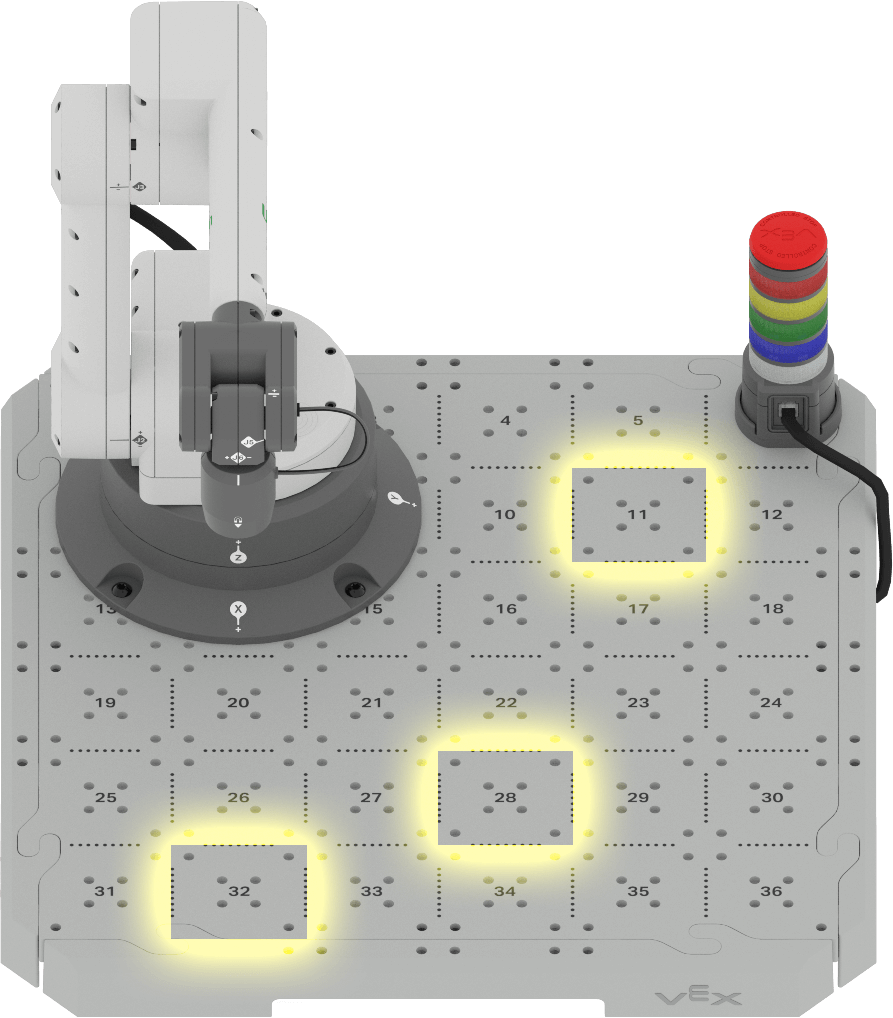
- Schätzen Sie die (x, y, z) -Koordinaten der folgenden Kachelpositionen. Angenommen, der 6-Achsen-Arm berührt jede Kachelposition und die z-Koordinate beträgt 0 mm.
- Kachelposition 11
- Kachelposition 32
- Kachelposition 28
- Notieren Sie diese Koordinaten in Ihrem technischen Notizbuch. Erklären Sie, wie Sie jede Koordinate bestimmt haben.
Überprüfe dein Verständnis
Bevor Sie mit der nächsten Lektion beginnen, stellen Sie sicher, dass Sie die in dieser Lektion behandelten Konzepte verstehen, indem Sie die Fragen im folgenden Dokument in Ihrem technischen Notizbuch beantworten.
Fragen zum Verständnis prüfen > (Google Doc / .docx / .pdf)
Wählen Sie Weiter > , um zu erfahren, wie Koordinaten mit den manuellen Bewegungen erfasst werden.