
Pelajaran 3: Sistem Koordinat Lengan 6-Sumbu
Dalam Pelajaran ini, Anda akan mempelajari tentang sistem koordinat Cartesian yang digunakan dengan Lengan Robot 6-Sumbu.
Di akhir Pelajaran ini, Anda akan menggunakan pemahaman Anda tentang sistem koordinat Cartesian dan hubungannya dengan Lengan 6-Sumbu untuk memperkirakan koordinat tiga lokasi Ubin CTE.

Sistem Koordinat Kartesius
Untuk menggerakkan Lengan 6-Sumbu di ruang angkasa, kita perlu memiliki kerangka acuan umum sehingga Lengan 6-Sumbu dapat bergerak ke lokasi yang diinginkan. Lengan 6-Sumbu menggunakan sistem koordinat Kartesius untuk menentukan di mana ujung Lengan 6-Sumbu berada.
Sumbu X, Y, dan Z
Sistem koordinat adalah jaringan nilai matematika. Ada berbagai jenis sistem koordinat, tetapi sistem koordinat Cartesian digunakan dengan Lengan 6-Sumbu. Ini juga dikenal sebagai sistem 3D (Dimensi), karena tiga dimensinya adalah sumbu x, y, dan z.

Sumbu x dapat ditunjukkan dengan menggerakkan Lengan 6-Sumbu ke arah alas (ditarik) dan menjauhi alas (dipanjangkan), seperti yang ditunjukkan dalam animasi ini.
Sumbu y dapat ditunjukkan dengan menggerakkan Lengan 6-Sumbu ke kiri dan kanan alas, seperti yang ditunjukkan dalam animasi ini.
Sumbu z dapat ditunjukkan dengan menggerakkan Lengan 6-Sumbu ke bawah menuju Ubin lalu ke atas menjauhi Ubin, seperti yang ditunjukkan dalam animasi ini.
Memperkirakan Koordinat
Koordinat (x, y, z) ditentukan oleh jarak dari koordinat (0, 0, 0), yang juga disebut titik asal, hingga ujung Lengan 6-Sumbu, yang disebut Titik Pusat Alat (TCP).
Titik asal atau (0, 0, 0) adalah lokasi di mana semua nilai dimulai. (0, 0, 0) pada Lengan 6-Sumbu terletak di tengah alas.

Ujung Lengan 6-Sumbu dikenal sebagai Titik Pusat Perkakas (TCP).
Untuk Lengan 6-Sumbu dalam gambar ini, TCP berada di ujung Alat Pengambilan Magnet.

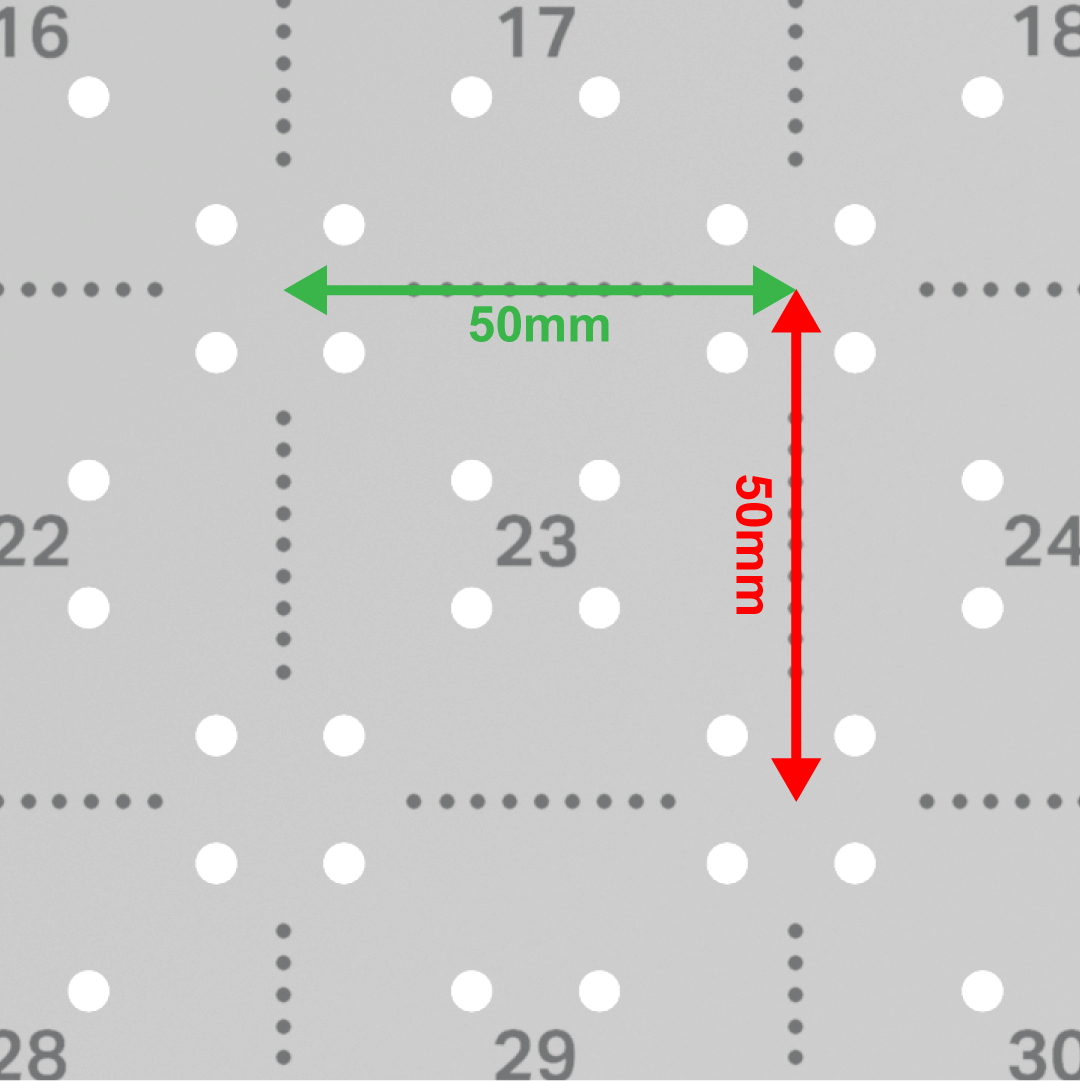
Anda dapat menggunakan gambar di sini untuk membantu menentukan koordinat x, y dari Lengan 6-Sumbu. Sumbu z akan ditunjukkan pada kisi berikut.

Ukuran masing-masing kotak pada Tile adalah 50 mm x 50 mm.
Pengumpulan nilai sumbu z dapat dilakukan dengan menentukan jarak dari Tile ke TCP.
Dalam contoh ini, nilai z TCP dapat diperkirakan berada di bawah 200 mm menggunakan kisi koordinat.

Koordinat (x, y, z) ditentukan oleh jarak (dalam milimeter) dari titik asal ke TCP sepanjang ketiga sumbu.
Dalam contoh ini, koordinat (x, y, z) akan menjadi (200, 200, 0) karena TCP berjarak 200 mm dari titik asal pada sumbu x, 200 mm dari titik asal pada sumbu y, dan 0 mm dari titik asal pada sumbu z.

Aktivitas
Sebelumnya dalam Pelajaran ini, kita membahas sistem koordinat Cartesian dan cara menentukan koordinat berdasarkan jarak dari titik asal ke TCP. Dalam kegiatan ini, Anda akan menentukan koordinat tiga lokasi Ubin.
- Perkirakan koordinat (x, y, z) dari lokasi Ubin berikut. Asumsikan Lengan 6-Sumbu menyentuh setiap lokasi Ubin dan koordinat z adalah 0 mm.
- Lokasi ubin 11
- Lokasi ubin 32
- Lokasi ubin 28
- Catat koordinat ini di buku catatan teknik Anda. Jelaskan bagaimana Anda menentukan setiap koordinat.

Periksa Pemahaman Anda
Sebelum memulai Pelajaran berikutnya, pastikan Anda memahami konsep yang dibahas dalam Pelajaran ini dengan menjawab pertanyaan dalam dokumen di bawah ini di buku catatan teknik Anda.
Pertanyaan Periksa Pemahaman Anda > (Google Doc / .docx / .pdf)
Pilih Berikutnya > untuk mempelajari cara mengumpulkan koordinat menggunakan gerakan manual.