
Les 3: Het coördinatensysteem van de 6-assige arm
In deze les leert u over het cartesische coördinatensysteem dat wordt gebruikt met de 6-assige robotarm.
Aan het einde van deze les gebruikt u uw kennis van het cartesische coördinatensysteem en de relatie ervan tot de 6-assige arm om de coördinaten van drie CTE-tegellocaties te schatten.
Cartesisch coördinatensysteem
Om de 6-assige arm door de ruimte te kunnen bewegen, hebben we een gemeenschappelijk referentiekader nodig, zodat de 6-assige arm naar de gewenste locatie kan bewegen. De 6-assige arm gebruikt het cartesische coördinatensysteem om te bepalen waar het uiteinde van de 6-assige arm zich bevindt.
X-, Y- en Z-assen
Een coördinatensysteem is een wiskundig raster van waarden. Er bestaan verschillende typen coördinatensystemen, maar bij de 6-assige arm wordt het cartesische coördinatensysteem gebruikt. Dit wordt ook wel een 3D (dimensionaal) systeem genoemd, omdat de drie dimensies de x-, y- en z-as zijn.

De x-as kan worden gedemonstreerd door de 6-assige arm naar de basis toe (ingetrokken) en van de basis af (uitgeschoven) te bewegen, zoals getoond in deze animatie.
De y-as kan worden gedemonstreerd door de 6-assige arm naar links en rechts van de basis te bewegen, zoals getoond in deze animatie.
De z-as kan worden gedemonstreerd door de 6-assige arm naar beneden richting de tegel te bewegen en vervolgens weer omhoog van de tegel af, zoals getoond in deze animatie.
Coördinaten schatten
De (x, y, z)-coördinaat wordt bepaald door de afstand van de (0, 0, 0)-coördinaat, ook wel de oorsprong genoemd, tot het uiteinde van de 6-assige arm, het zogenaamde Tool Center Point (TCP).
De oorsprong of (0, 0, 0) is de locatie waar alle waarden beginnen. De (0, 0, 0) op de 6-assige arm bevindt zich in het midden van de basis.
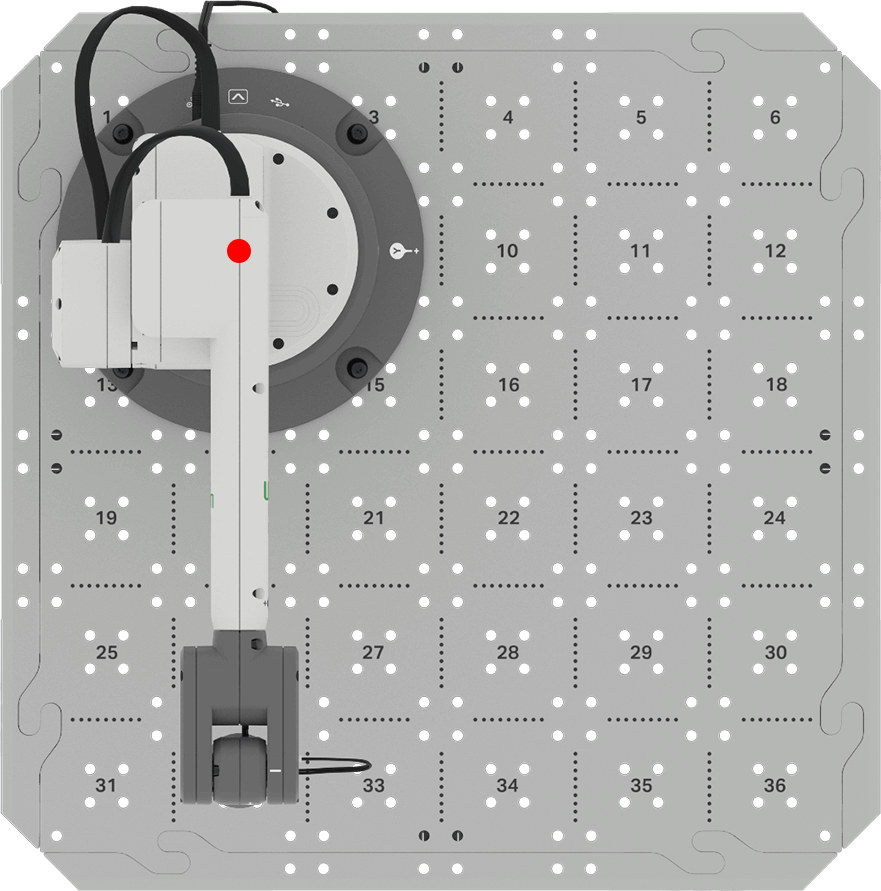
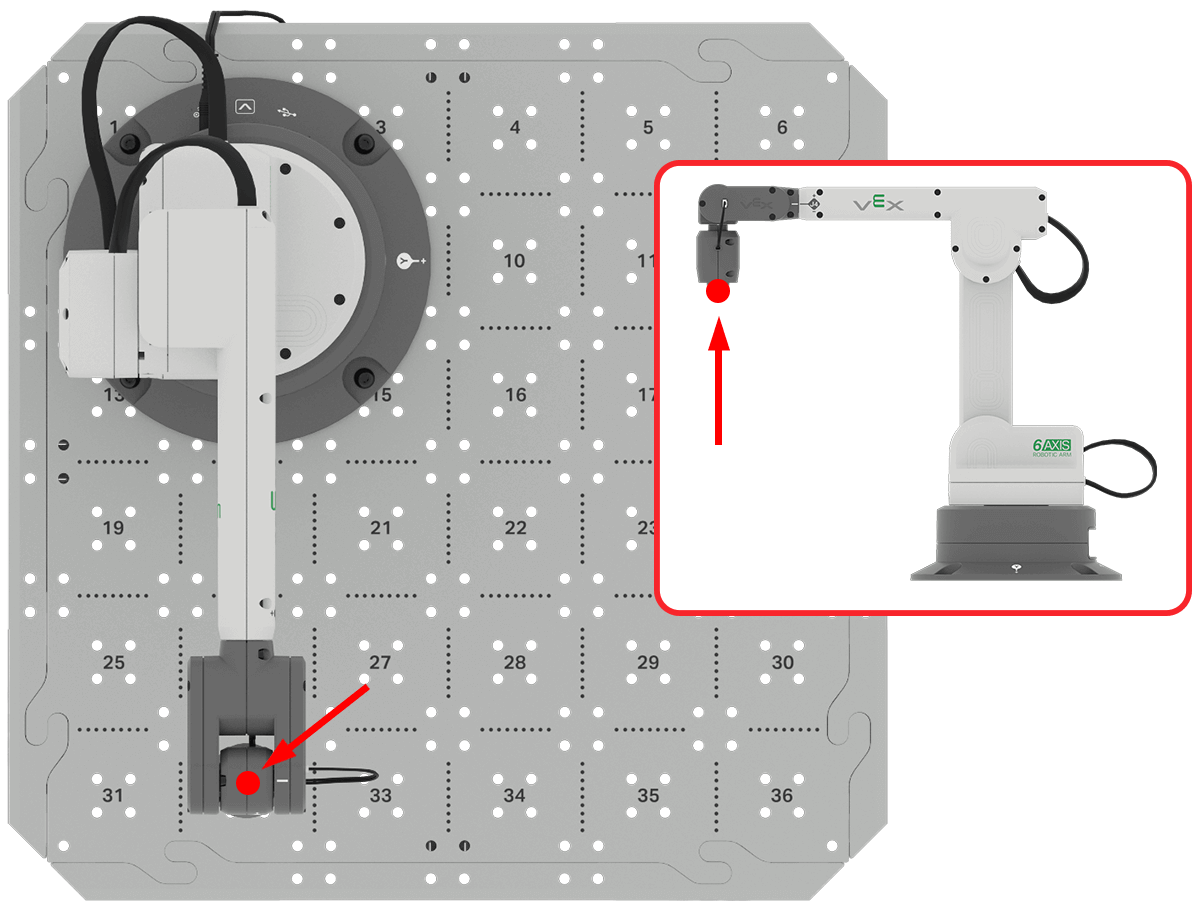
Het uiteinde van de 6-assige arm staat bekend als het Tool Center Point (TCP).
Voor de 6-assige arm in deze afbeelding bevindt het TCP zich aan het uiteinde van de magneetopnametool.
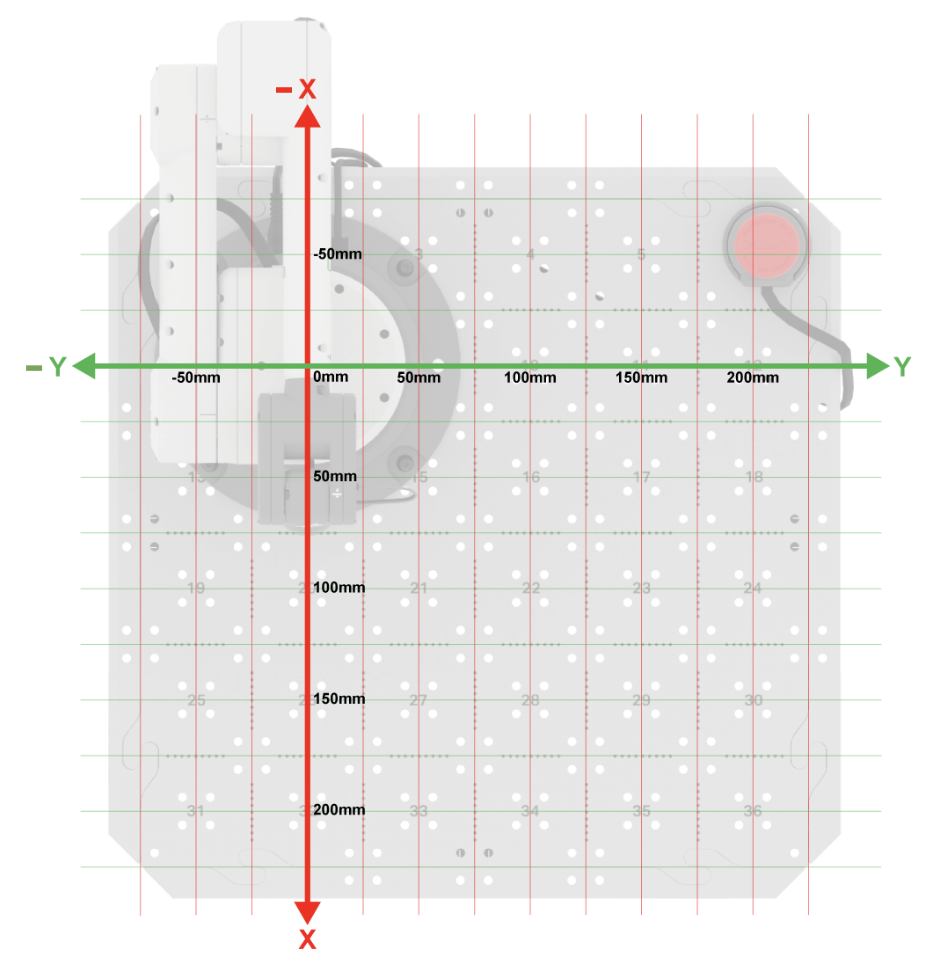
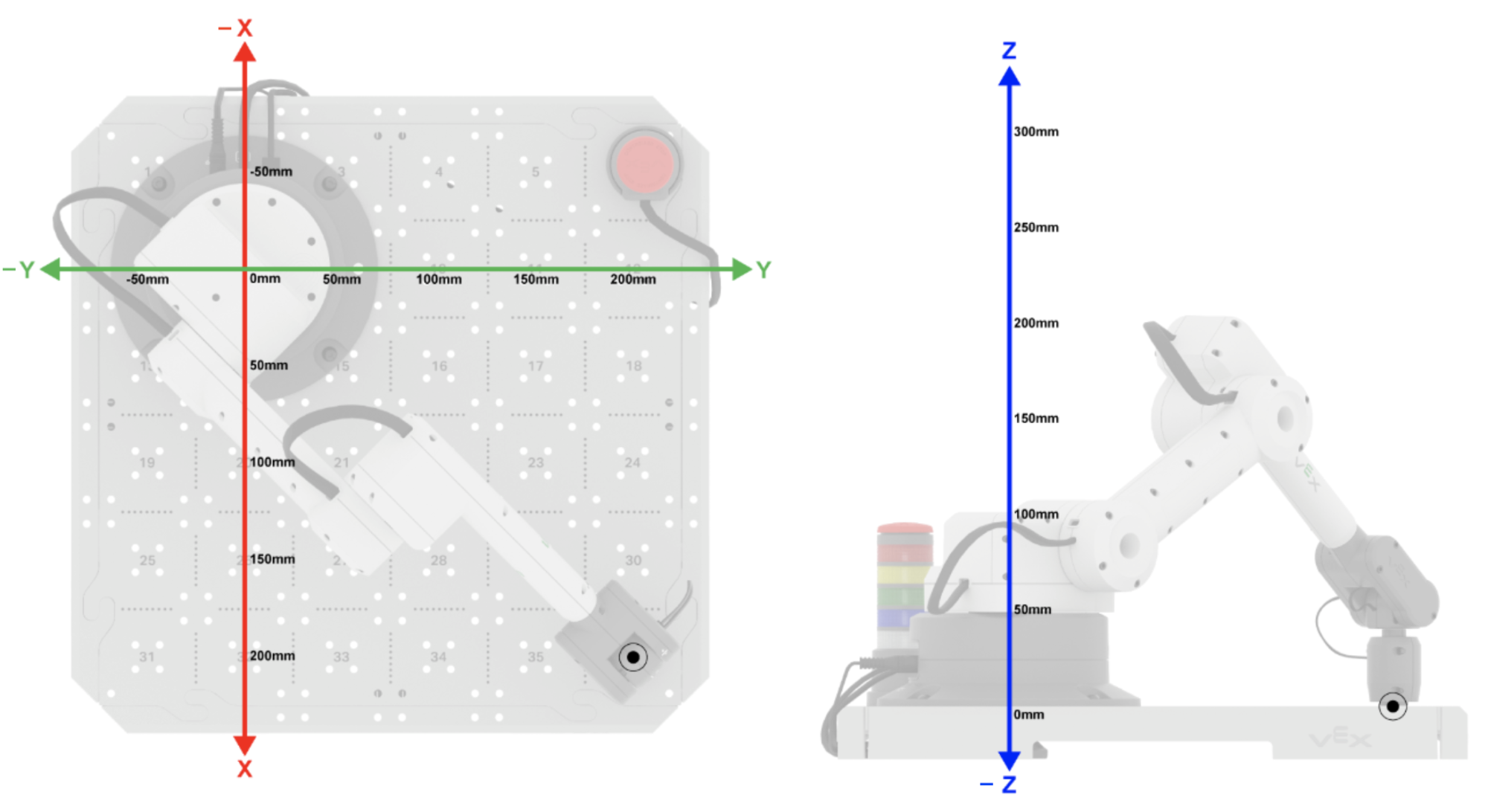
U kunt de afbeelding hier gebruiken om de x- en y-coördinaten van de 6-assige arm te bepalen. De z-as wordt in het volgende raster weergegeven.
De afmetingen van elk afzonderlijk vierkant op de tegel zijn 50 mm bij 50 mm.

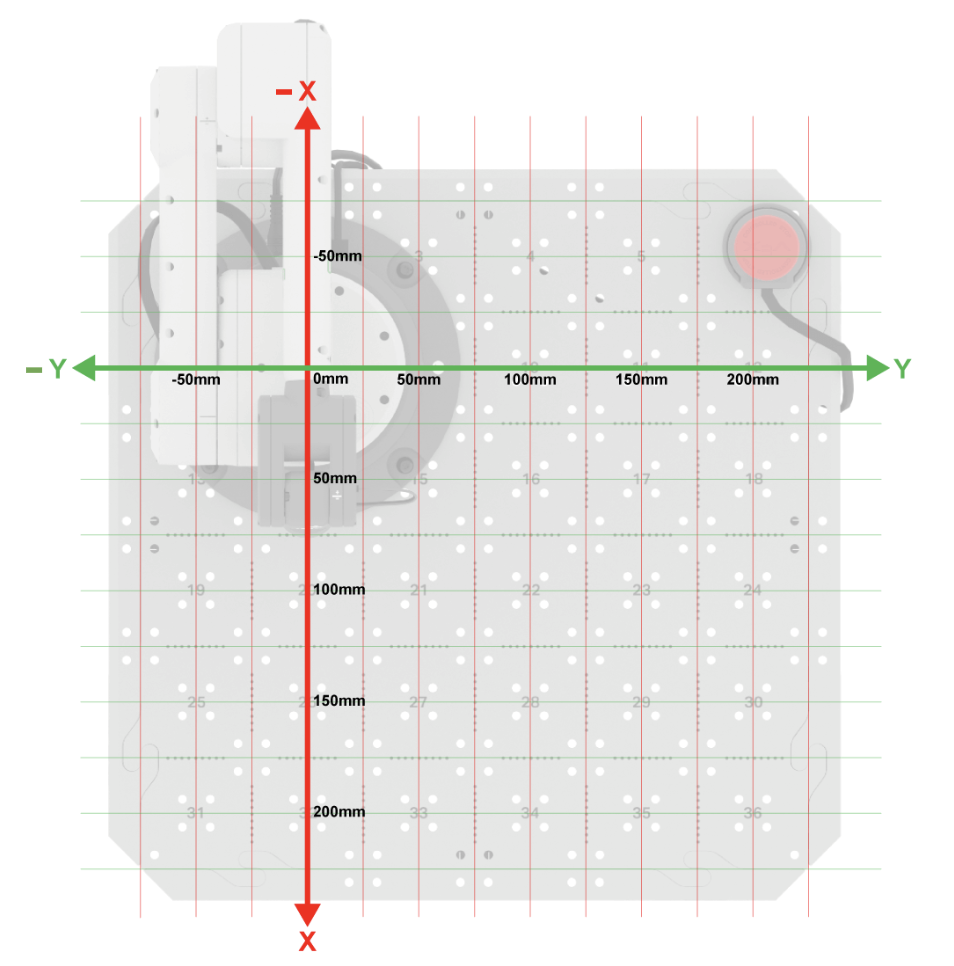
De z-aswaarde kan worden verzameld door de afstand van de Tile tot de TCP te bepalen.
In dit voorbeeld kan de z-waarde van de TCP met behulp van het coördinatenraster worden geschat op iets minder dan 200 mm.
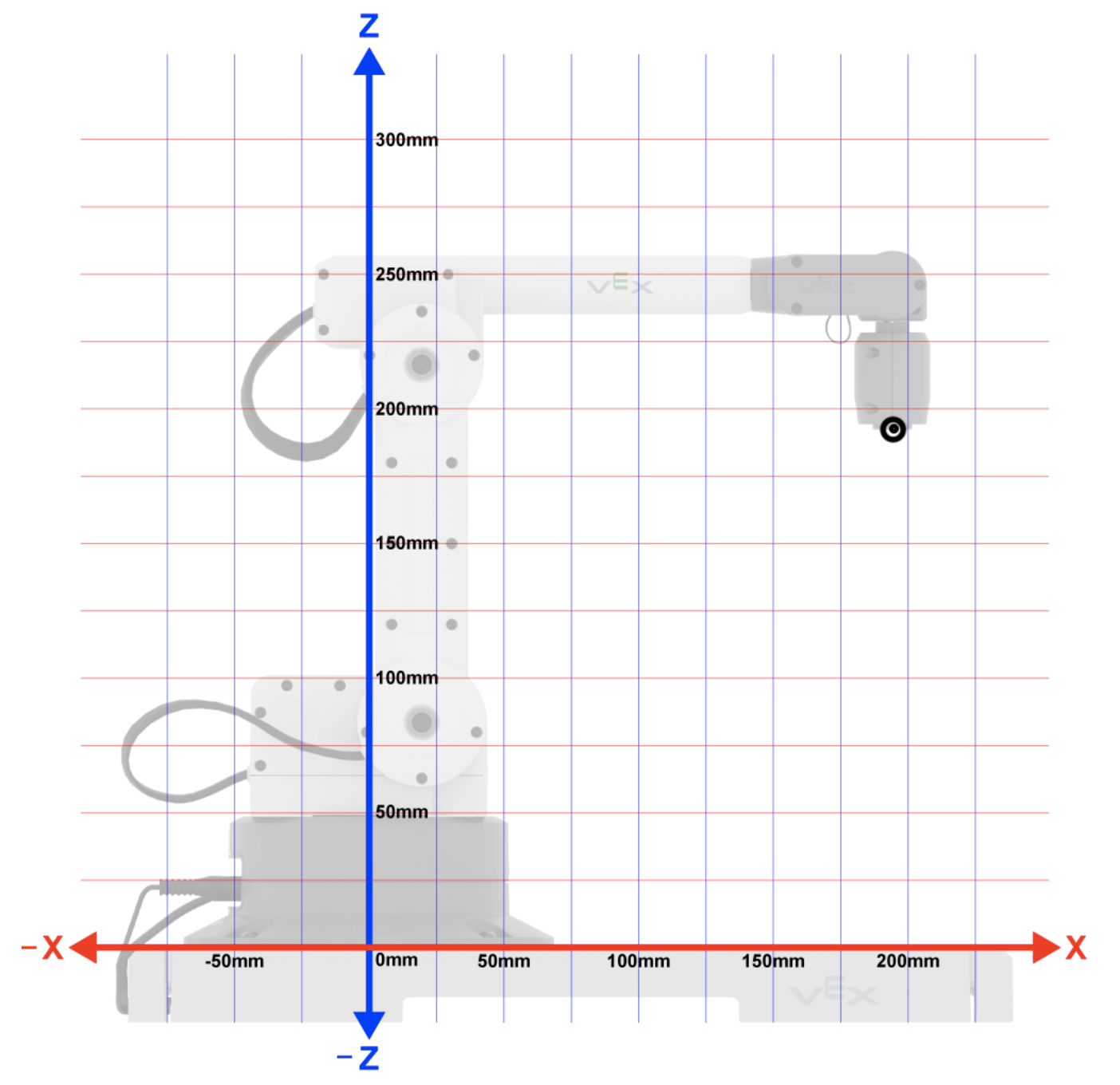
De (x, y, z)-coördinaat wordt bepaald door de afstand (in millimeters) van de oorsprong tot het TCP langs alle drie de assen.
In dit voorbeeld zou de (x, y, z)-coördinaat (200, 200, 0) zijn omdat de TCP zich op 200 mm van de oorsprong in de x-as bevindt, op 200 mm van de oorsprong in de y-as en op 0 mm van de oorsprong in de z-as.
Activiteit
Eerder in deze les hebben we het cartesische coördinatensysteem besproken en hoe je coördinaten kunt bepalen op basis van de afstand van de oorsprong tot het TCP. In deze activiteit ga je de coördinaten van drie Tile-locaties bepalen.
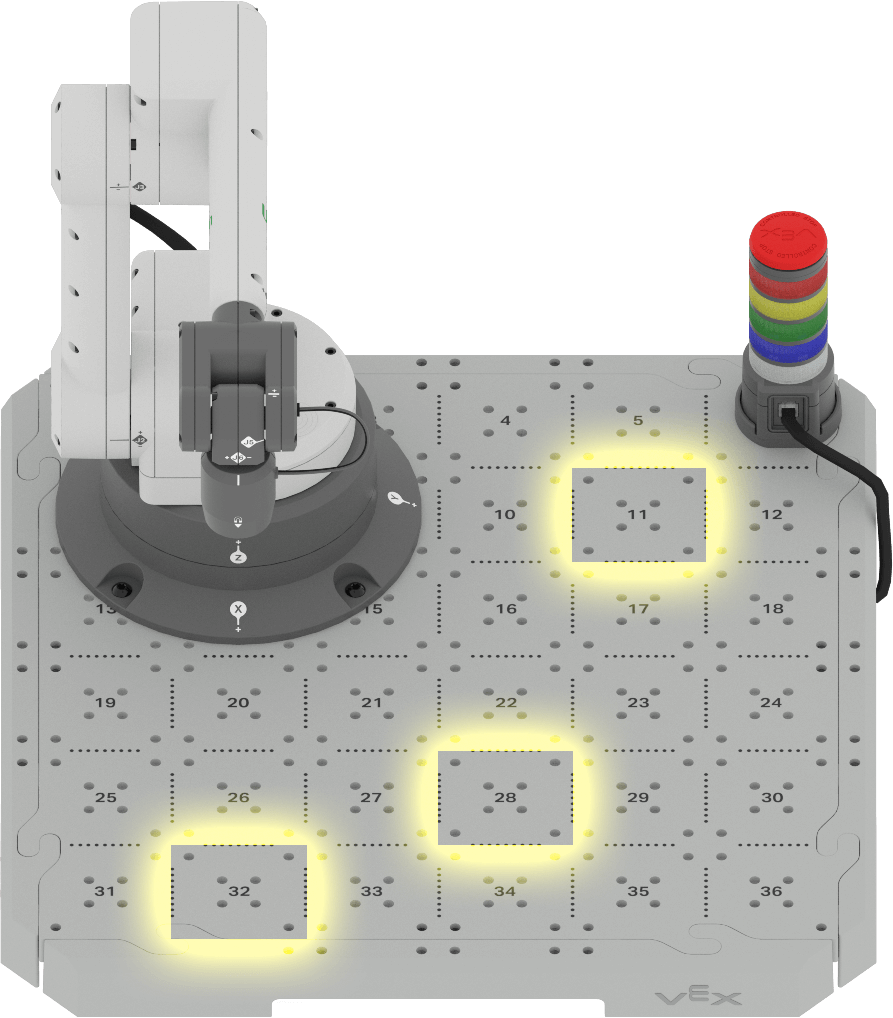
- Schat de (x, y, z)-coördinaten van de volgende tegellocaties. Ga ervan uit dat de 6-assige arm elke tegellocatie raakt en dat de z-coördinaat 0 mm is.
- Tegellocatie 11
- Tegellocatie 32
- Tegellocatie 28
- Noteer deze coördinaten in uw technisch notitieboekje. Leg uit hoe u elke coördinaat hebt bepaald.
Controleer uw begrip
Voordat u met de volgende les begint, moet u ervoor zorgen dat u de concepten die in deze les worden behandeld begrijpt. Dit doet u door de vragen in het onderstaande document in uw technische notitieboekje te beantwoorden.
Controleer uw begrip vragen > (Google Doc / .docx / .pdf)
Selecteer Volgende > om te leren hoe u coördinaten verzamelt met behulp van handmatige bewegingen.