
استكشاف المراقب - الجزء 3
![]() صندوق أدوات المعلم
- كتل
[إلى الأبد]
صندوق أدوات المعلم
- كتل
[إلى الأبد]
تناقش هذه الخطوة أهمية كتلة [Forever]. يجب عليك مراجعة المعلومات كصف. يمكنك نمذجة السلوك باستخدام Clawbot و Controller، أو إذا سمح الوقت، اطلب من الطلاب تشغيل البرنامج دون حظر [Forever].
الخطوة 1: برمجة وحدة التحكم
ما هي فوائد استخدام كتلة [Forever ]؟
قم ببناء هذا المشروع كما هو موضح أدناه
دون كتلة [Forever]:
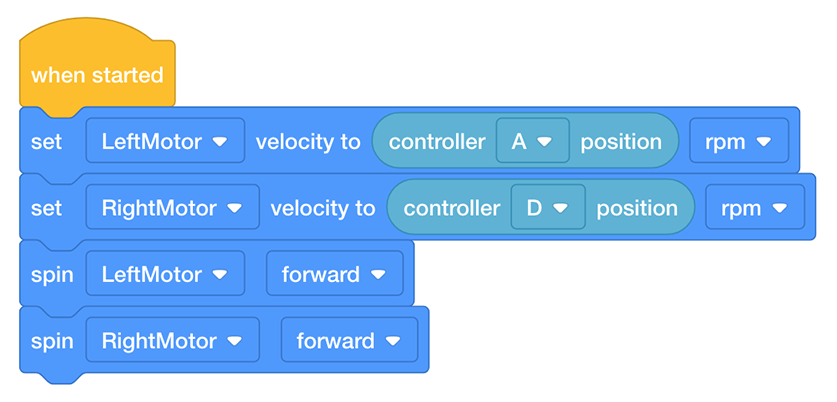
ماذا تعتقد أنه سيحدث إذا تم تشغيل هذا البرنامج ؟ ناقشوا كمجموعة. يجب على المسجل كتابة تنبؤات الفريق في دفتر الملاحظات الهندسي.
![]() صندوق أدوات المعلم
-
فهم الكتلة
صندوق أدوات المعلم
-
فهم الكتلة
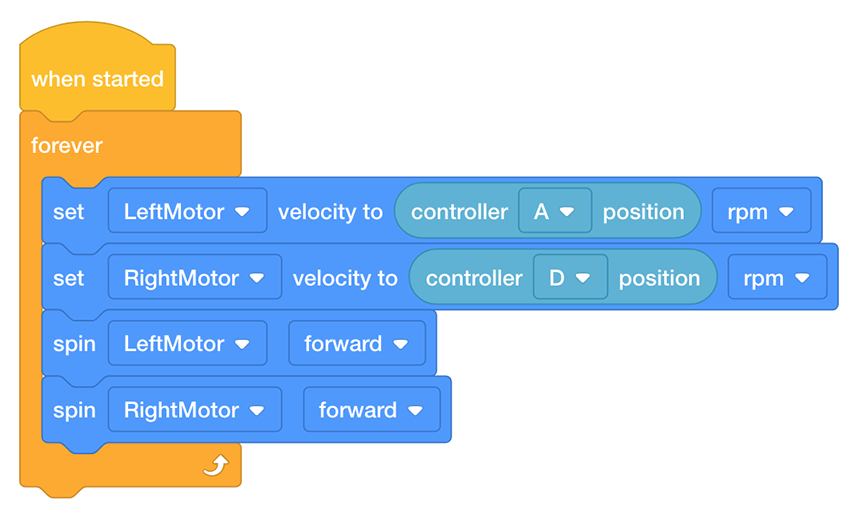
بدون حلقة [إلى الأبد]، يتم تعيين قيمة السرعة لكل محرك بمجرد تشغيل المشروع، وتبقى هذه
القيمة ثابتة حتى يتم إيقاف المشروع. بمعنى آخر، إذا قمت بتشغيل المشروع دون تحريك أي من
عصا التحكم، لأن الموضع الافتراضي لعصا التحكم على محوره هو 0، فستظل سرعة كلا المحركين عند
0، حتى إذا قمت بتحريك عصا التحكم.
وبالمثل، لنفترض أنك تحرك عصا التحكم اليسرى
لأعلى بقدر ما ستذهب على طول المحور A وتحملها هناك. إذا قمت بتشغيل المشروع أعلاه، فسيتحرك
المحرك الأيسر بأقصى سرعة وسيظل بهذه السرعة حتى إذا قمت بتحريك عصا التحكم لأسفل على طول
المحور A. وذلك لأن Clawbot يتلقى تعليماته الأولية من وحدة التحكم بمجرد تشغيل المشروع ؛
ومع ذلك، بدون حلقة، لا يمكن تحديث القيمة الأولية. تخبر
حلقة [Forever]
Clawbot بتحديث السرعة باستمرار وتشغيلها طوال مدة المشروع. بمعنى آخر،
تمكنك حلقة [Forever]، في هذا المشروع، من تغيير سرعة كل محرك عن طريق تحريك عصا
التحكم على طول المحور A أو D، وسوف يستجيب Clawbot وفقًا لذلك حتى تقوم بإيقاف المشروع أو
إيقاف تشغيل Clawbot.
الخطوة 2: التنقل في دورة التعرج

الآن بعد أن تم إقران وحدة التحكم وتحميل المشروع، أنت على استعداد لنقل Clawbot الخاص بك باستخدام وحدة التحكم!
- يجب على الباني والمبرمج جمع عناصر الفصل الأربعة التي ستستخدمها كأعلام في تعرجك من المعلم.
- يجب أن يتعاون الباني والمبرمج والمسجل لتثبيتها في مكانها حتى يتمكن السائق من التنقل في Clawbot، وفقًا لمخطط التعرج.
- يجب على السائق تنزيل مشروع clawbotController. إذا كانت هناك أي أسئلة حول كيفية تنزيل مشروع، فراجع البرنامج التعليمي Download and Run a Project.
![]() مجموعة أدوات المعلم
-
إعداد التحدي
مجموعة أدوات المعلم
-
إعداد التحدي
اطلب من الطلاب إكمال هذا التعرج باستخدام وحدة التحكم لتحريك Clawbot على طول الجزء الخارجي من كل "علامة". يجب أن يمنع مسار Clawbot من لمس أي علم ويسمح له بعبور خط النهاية. يمكن أن تكون الأعلام أي مادة/كائن في الفصل الدراسي لديك (ممحاة، لفة من الشريط، علبة مناديل) ويمكن وضعها في مكانها قبل تشغيل Clawbot.
- إذا سمح الوقت، اطلب من الطلاب تبديل الأدوار لمنح الآخرين الفرصة لقيادة Clawbot. يمكنك حتى تحويل هذا إلى منافسة داخل المجموعات أو بين المجموعات من خلال معرفة مدى سرعة كل سائق في التنقل في التعرج.
-
للحصول على معلومات حول كيفية تنظيم مسابقة صفية مع دورة التعرج، انقر أدناه.
Google Doc / .docx / .pdf
الخطوة 3: روبو سلالوم
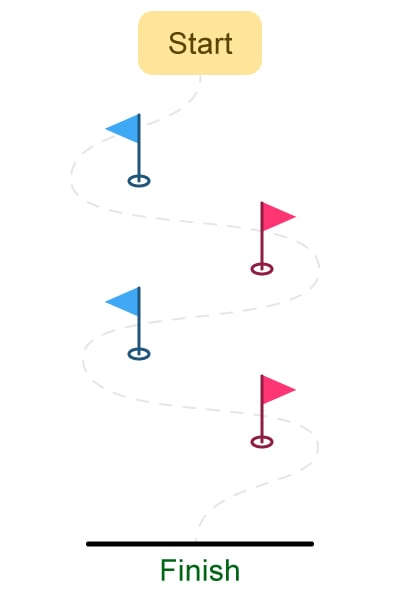
استخدم وحدة التحكم لتحريك Clawbot الخاص بك على طول الجزء الخارجي من كل "علامة". يجب أن يمنع مسار الروبوت من لمس أي علم، ويسمح له بعبور خط النهاية.
- يجب على السائق تشغيل المشروع ودفع Clawbot للأمام والخلف، والانعطاف يسارًا ويمينًا باستخدام كل من عصا التحكم.
- يجب أن يقوم المسجل بتوقيت الوقت الذي يستغرقه Clawbot لإكمال الدورة التدريبية. قم بتوثيق الأوقات في دفتر الملاحظات الهندسي.
- ما مدى السرعة التي يمكنك بها الحصول على Clawbot من خلال دورة Slalom ؟
![]() تحفيز المناقشة
-
التفكير في النشاط
تحفيز المناقشة
-
التفكير في النشاط
س: هل استجاب المخلب للمراقب كما توقعت ؟
ج: ستختلف الإجابات ؛ ومع ذلك، فإن الهدف من هذا السؤال هو تعزيز
التفكير المعرفي. بدأ الطلاب بالتنبؤ بالسلوكيات قبل اختبارها وتوثيق نتائجها والتفكير
فيها.
س: ما هو التحدي الأكبر في تحريك Clawbot للأمام أو للخلف في خط
مستقيم ؟
ج: في حين أن الإجابات قد تختلف، يجب أن تكون الاستجابة الشائعة هي
أن كلا عصا التحكم يجب أن تتحرك بالتزامن مع بعضها البعض للتأكد من أن محركات Clawbot تتحرك
في نفس الاتجاه وبنفس السرعة.
س: كيف يمكّنك استخدام حلقة [Forever] من استخدام وحدة التحكم
باستمرار لتحريك Clawbot ؟
ج: بدون حلقة [إلى الأبد]، لن يؤدي Clawbot السلوكيات التي
تحددها الكتل في المشروع إلا مرة واحدة. تخبر حلقة [Forever] Clawbot بتحديث
السرعة باستمرار وتشغيلها طوال مدة المشروع. بمعنى آخر، تمكنك حلقة [Forever] من
استخدام وحدة التحكم لتحريك Clawbot إلى أجل غير مسمى، أو حتى تموت البطارية.