
![]() 教師工具箱
-
[永遠] 積木
教師工具箱
-
[永遠] 積木
這一步討論了 [Forever] 塊的重要性。 您應該全班複習這些資訊。 您可以使用 Clawbot 和控制器對行為進行建模,或者如果時間允許,請讓學生在沒有 [Forever] 區塊的情況下執行程式。
第 1 步:控制器編程
使用 [Forever] 塊有什麼好處?
如下所示建構此項目,不使用 [Forever] 塊:
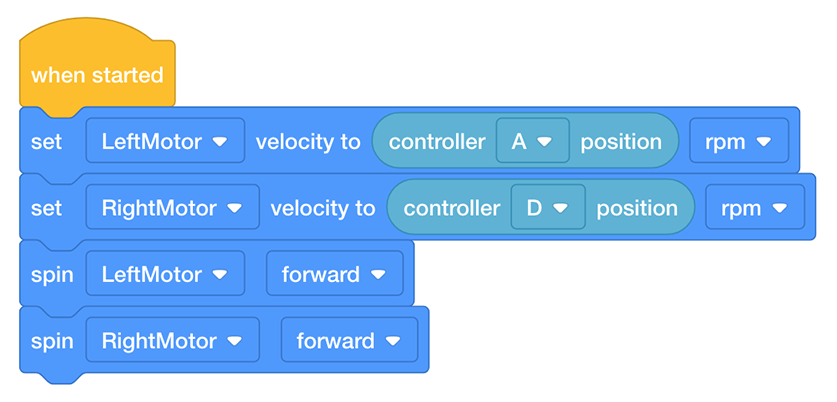
你認為如果運行這個程式會發生什麼? 以小組形式討論。 記錄員應該在工程筆記本上寫下團隊的預測。
![]() 教師工具箱
-
理解積木
教師工具箱
-
理解積木
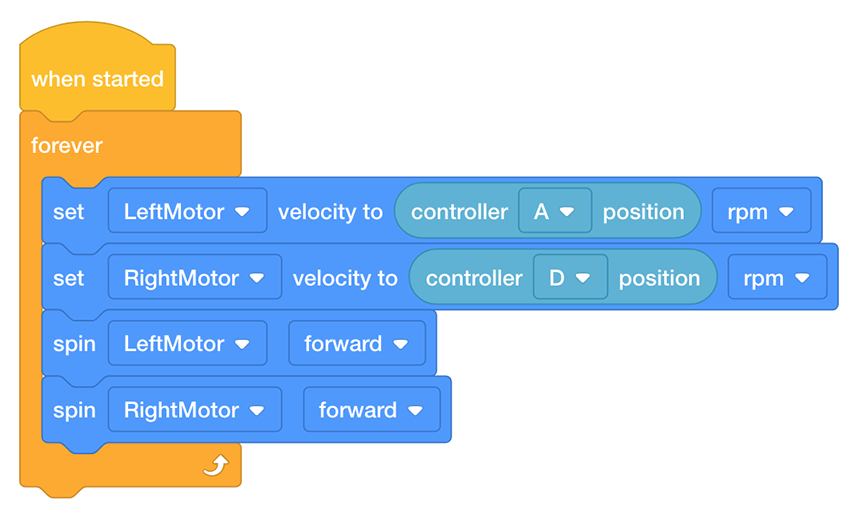
如果沒有 [Forever] 循環,則專案運行後就會設定每個馬達的速度值,並且該值保持恆定,直到專案停止。 換句話說,如果您在不移動任一操縱桿的情況下運行該項目,由於操縱桿在其軸上的預設位置為0,因此即使您移動操縱桿,兩個馬達的速度也將保持為0 。
同樣,假設您將左操縱桿向上移動到其沿 A 軸移動的最遠位置並保持在那裡。 如果運行上面的項目,左側馬達將全速移動,即使您沿著 A 軸向下移動操縱桿,也會保持該速度。 這是因為專案一運行,Clawbot 就會從控制器收到初始指令;但是,如果沒有循環,該初始值就無法更新。
[Forever] 循環告訴 Clawbot 不斷更新速度並在專案期間運行。 換句話說,在這個專案中, [Forever] 循環使您能夠透過沿著 A 或 D 軸移動操縱桿來改變每個馬達的速度,並且 Clawbot 將做出相應的響應,直到您停止專案或關閉利爪機器人。
第 2 步:完成迴轉路線

現在 控制器已配對 且專案已下載 ,您已準備好使用控制器移動 Clawbot!
-
搭建者和程式設計師應該從老師那裡收集四個課堂物品,這些物品將用作迴轉比賽中的旗幟。
-
根據激流迴旋圖,建造者、程式設計師和記錄者應協作將它們設定到位,以便駕駛員能夠導航 Clawbot。
-
驅動程式應下載clawbotController專案。 如果對如何下載專案有任何疑問,請查看下載並執行專案教學。
第三步:機器人迴轉
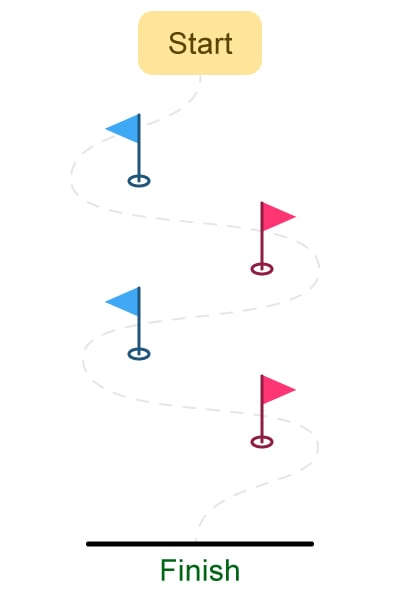
使用控制器沿著每個“旗幟”的外側移動您的爪機器人。 機器人的路徑必須防止它接觸任何旗幟,並允許它越過終點線。
-
駕駛員應運行該項目並使用兩個操縱桿驅動 Clawbot 前進和後退,以及左轉和右轉。
-
記錄員應記錄 Clawbot 完成課程所需的時間。 在工程筆記本中記錄時間。
-
您能以多快的速度讓 Clawbot 通過迴轉課程?
![]() 激發討論
-
反思活動
激發討論
-
反思活動
問: Clawbot 是否依照您的預期對控制器作出回應?
A: 答案會有所不同;然而,這個問題的目標是促進認知思考。 學生首先預測行為,然後進行測試、記錄結果並進行反思。
Q: 使 Clawbot 直線前進或後退的最大挑戰是什麼?
A: 雖然答案可能有所不同,但一個常見的答案應該是兩個操縱桿必須彼此同步移動,以確保 Clawbot 的馬達以相同的方向和相同的速度移動。
Q: 使用 [Forever] 循環如何使您能夠連續使用控制器移動 Clawbot?
A: 如果沒有 [Forever] 循環,Clawbot 只會執行專案中的區塊確定的行為一次。 [Forever] 循環告訴 Clawbot 不斷更新速度並在專案期間運行。 換句話說, [永遠] 循環使您能夠使用控制器無限期地移動 Clawbot,或直到電池耗盡。