
![]() 教师工具箱
-
[永久] 积木
教师工具箱
-
[永久] 积木
这一步讨论了 [永远] 块的重要性。 您应该全班复习这些信息。 您可以使用 Clawbot 和控制器来建模行为,或者如果时间允许,让学生在没有 [Forever] 块的情况下运行程序。
第 1 步:控制器编程
使用 [永远] 块有什么好处?
按照如下所示构建此项目,但不包含 [Forever] 块:
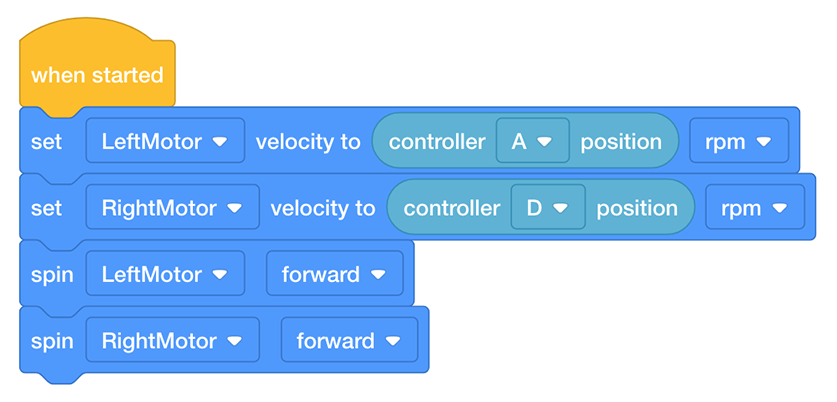
你认为如果运行这个程序会发生什么? 以小组形式讨论。 记录员应该在工程笔记本上写下团队的预测。
![]() 教师工具箱
-
理解区块
教师工具箱
-
理解区块
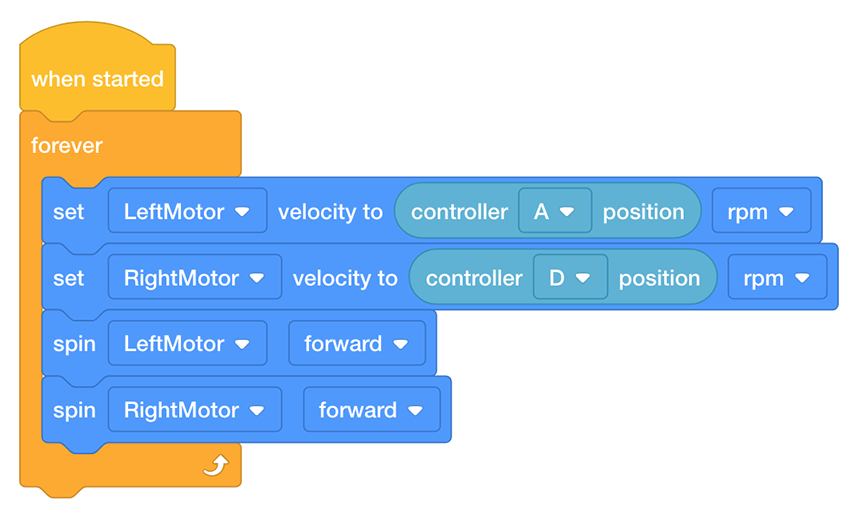
如果没有 [Forever] 循环,则每个电机的速度值会在项目运行时立即设置,并且该值保持不变,直到项目停止。 换句话说,如果您在不移动任一操纵杆的情况下运行该项目,由于操纵杆在其轴上的默认位置为 0,因此即使您移动操纵杆,两个电机的速度也将保持为 0。
同样,假设您将左操纵杆向上移动到其沿 A 轴移动的最远位置并保持在那里。 如果运行上面的项目,左侧电机将全速移动,并且即使您沿 A 轴向下移动操纵杆,也会保持该速度。 这是因为项目一运行,Clawbot 就会从控制器收到初始指令;但是,如果没有循环,该初始值就无法更新。
[永远] 循环告诉 Clawbot 不断更新速度并在项目持续期间运行。 换句话说,在此项目中, [永远] 循环使您能够通过沿 A 或 D 轴移动操纵杆来改变每个电机的速度,并且 Clawbot 将做出相应的响应,直到您停止项目或关闭 Clawbot。

![]() 教师工具箱
-
设置挑战
教师工具箱
-
设置挑战
让学生使用控制器沿着每个“旗帜”的外侧移动 Clawbot 来完成这项回转。 爪机器人的路径必须防止它接触任何旗帜并允许它越过终点线。 旗帜可以是您手边的任何课堂材料/物体(橡皮擦、胶带卷、纸巾盒),并且可以在操作 Clawbot 之前设置到位。
-
如果时间允许,让学生交换角色,让其他人有机会驾驶 Clawbot。 您甚至可以将其转变为组内或组间的竞赛,看看每个车手在绕桩中的速度有多快。
-
有关如何组织 Slalom 课程课堂竞赛的信息, 点击下方。
第三步:机器人回转
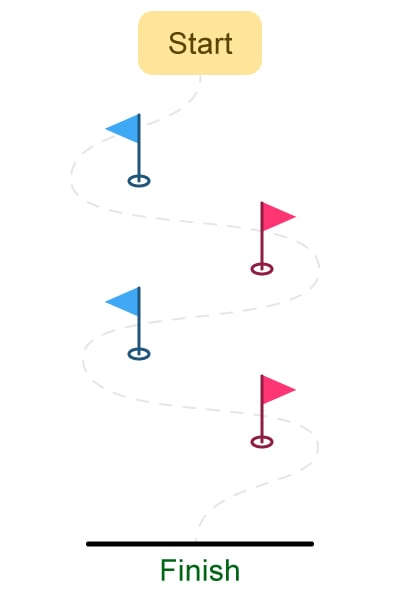
使用控制器沿着每个“旗帜”的外侧移动您的爪机器人。 机器人的路径必须防止它接触任何旗帜,并允许它越过终点线。
-
驾驶员应运行该项目并使用两个操纵杆驱动 Clawbot 前进和后退,以及左转和右转。
-
记录员应记录 Clawbot 完成课程所需的时间。 在工程笔记本中记录时间。
-
您能以多快的速度让 Clawbot 通过回转课程?
![]() 激发讨论
-
反思活动
激发讨论
-
反思活动
问: Clawbot 是否按照您预期的那样对控制器做出响应?
答: 答案各不相同;不过,这个问题的目标是促进认知思维。 学生们首先预测行为,然后进行测试、记录结果并进行反思。
问: 使 Clawbot 沿直线前进或后退的最大挑战是什么?
答: 虽然答案可能有所不同,但常见的回答应该是两个操纵杆必须彼此同步移动,以确保 Clawbot 的电机以相同的方向和相同的速度移动。
问: 如何使用 [永远] 循环使您能够连续使用控制器来移动 Clawbot?
答: 如果没有 [永远] 循环,Clawbot 只会执行一次项目中的块所确定的行为。 [永远] 循环告诉 Clawbot 不断更新速度并在项目持续期间运行。 换句话说, [永远] 循环使您能够使用控制器无限期地移动 Clawbot,或者直到电池耗尽。