
Exploração do Controlador - Parte 3
![]() Caixa de ferramentas do professor
-
[Para sempre] Blocos
Caixa de ferramentas do professor
-
[Para sempre] Blocos
Esta etapa discute a importância do bloco [Para Sempre]. Deve rever as informações em classe. Pode modelar o comportamento com o seu Clawbot e Controller ou, se o tempo permitir, fazer com que os alunos executem o programa sem o bloco [Forever].
Passo 1: Programação do Controlador
Quais são os benefícios de utilizar um bloco [Para sempre]?
Construa este projeto
como se mostra abaixo sem o bloco [Para sempre] :
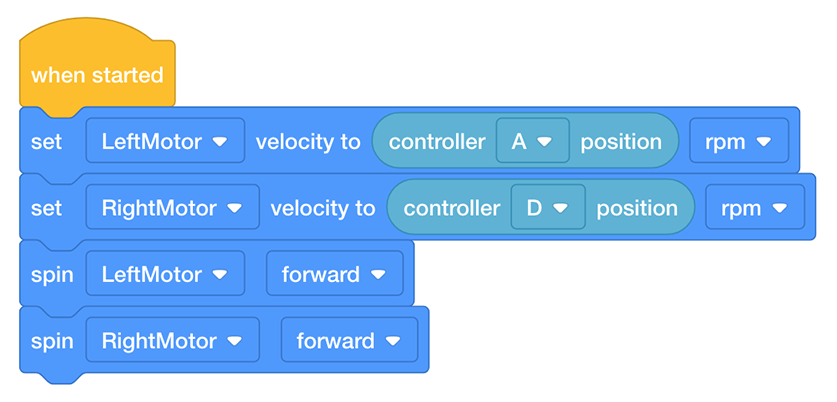
O que acha que aconteceria se este programa fosse executado? Discuta em grupo. O Registador deverá anotar a previsão da equipa no caderno de engenharia.
![]() Caixa de ferramentas do professor
-
Compreender o bloco
Caixa de ferramentas do professor
-
Compreender o bloco
Sem o ciclo [Para sempre], o valor da velocidade para cada motor é definido assim
que o projeto é executado e este valor permanece constante até que o projeto seja
interrompido. Por outras palavras, se executar o projeto sem mover nenhum dos Joysticks,
uma vez que a posição padrão do Joystick no seu eixo é 0, a velocidade de ambos os
motores permanecerá em 0, mesmo que mova o Joystick.
Da mesma forma, digamos que
move o Joystick esquerdo para cima o máximo possível ao longo do eixo A e o mantém nessa
posição. Se executar o projeto acima, o motor esquerdo move-se a toda a velocidade e
permanece a essa velocidade mesmo que mova o joystick para baixo ao longo do eixo A.
Isto acontece porque o Clawbot recebe as suas instruções iniciais do Controlador assim
que o projeto é executado; no entanto, sem um Loop, este valor inicial não pode ser
atualizado.
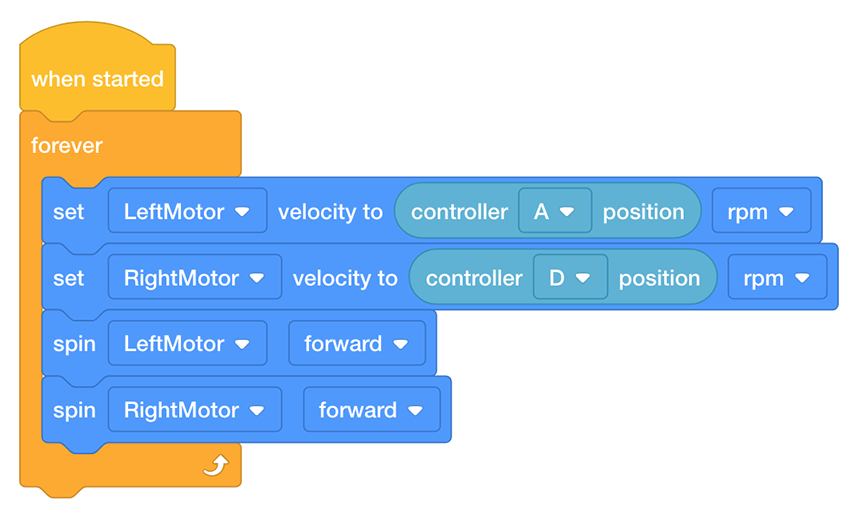
O ciclo [Para sempre] indica ao Clawbot para atualizar
constantemente a velocidade e executar durante o projeto. Por outras palavras, o
loop [Forever] , neste projeto, permite alterar a velocidade de cada motor
movendo o Joystick ao longo do eixo A ou D, e o Clawbot responderá em conformidade até
que pare o projeto ou desligue o Garrabot. .
Passo 2: navegar num percurso de slalom

Agora que o Controlador está emparelhado e o projeto foi descarregado, está pronto para mover o seu Clawbot utilizando o Controlador!
- O Construtor e o Programador devem recolher do professor os quatro itens de sala de aula que irá utilizar como bandeiras no seu slalom.
- O Construtor, o Programador e o Registador devem colaborar para os colocar no lugar para que o Condutor navegue no Clawbot, de acordo com o diagrama de slalom.
- O Driver deverá descarregar o projeto ClawbotController. Se houver alguma dúvida sobre como descarregar um projeto, consulte o tutorial Descarregar e executar um projeto.
![]() Caixa de ferramentas do professor
-
Configurar o desafio
Caixa de ferramentas do professor
-
Configurar o desafio
Peça aos alunos que completem este slalom utilizando o Controlador para mover o Clawbot ao longo da parte exterior de cada “bandeira”. O caminho do Clawbot deve evitar que toque em qualquer bandeira e permitir-lhe cruzar a linha de chegada. As bandeiras podem ser qualquer material/objeto de sala de aula que tenha à mão (borracha, rolo de fita adesiva, caixa de lenços de papel) e podem ser colocadas antes de operar o Clawbot.
- Se o tempo permitir, peça aos alunos que troquem de função para dar aos outros a oportunidade de conduzir o Clawbot. Pode até transformar isto numa competição dentro de grupos ou entre grupos, observando a rapidez com que cada piloto consegue navegar no slalom.
-
Para obter informações sobre como organizar uma competição presencial com o curso de Slalom, clique .
Passo 3: Robo-Slalom
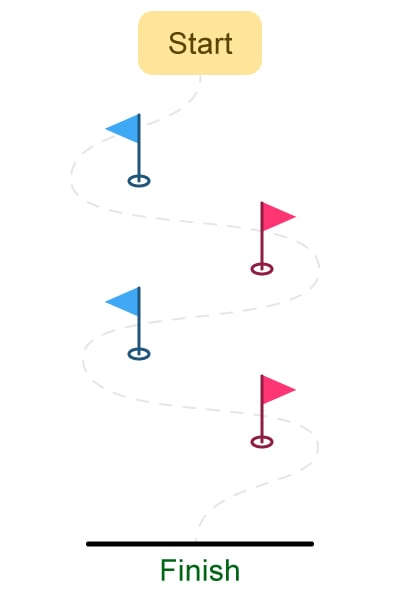
Utiliza o controlador para mover o teu Clawbot ao longo da parte exterior de cada “bandeira”. A trajetória do robô deve evitar que este toque em qualquer bandeira e permitir-lhe cruzar a linha de chegada.
- O Driver deve executar o projeto e conduzir o Clawbot para a frente e para trás, e virar à esquerda e à direita utilizando ambos os Joysticks.
- O Registador deve cronometrar quanto tempo demora o Clawbot a completar o percurso. Documente os tempos no caderno de engenharia.
- Quão rápido consegues fazer o Clawbot passar pelo percurso de Slalom?
![]() Motivar a Discussão
-
Reflectir sobre a Actividade
Motivar a Discussão
-
Reflectir sobre a Actividade
P: O Clawbot respondeu ao Controlador como esperava?
A: As respostas variam; no entanto, o objetivo desta questão é
promover o pensamento cognitivo. Os alunos começaram por prever os comportamentos antes
de os testar, documentando os seus resultados e refletindo.
P: Qual é o maior desafio em mover o Clawbot para a frente ou para
trás em linha reta?
A: Embora as respostas possam variar, uma resposta comum deve ser
que ambos os Joysticks devem mover-se em sincronia um com o outro para garantir que os
motores do Clawbot se movem na mesma direção e à mesma velocidade.
P: Como é que a utilização do ciclo [Para sempre] permite
utilizar continuamente o Controlador para mover o Clawbot?
A: Sem o ciclo [Para sempre] , o Clawbot executaria
apenas uma vez os comportamentos determinados pelos blocos no projeto. O
ciclo [Para sempre] indica ao Clawbot para atualizar constantemente a
velocidade e executar durante o projeto. Por outras palavras, o ciclo [Para
sempre] permite-lhe utilizar o Controlador para mover o Clawbot indefinidamente ou
até que a bateria se esgote.