
Kontrolör Keşfi - Bölüm 3
![]() Öğretmen Araç Kutusu
-
[Forever] Blokları
Öğretmen Araç Kutusu
-
[Forever] Blokları
Bu adım, [Forever] bloğunun önemini tartışmaktadır. Bilgileri sınıf olarak gözden geçirmelisiniz. Davranışı Clawbot ve Controller ile modelleyebilir veya zaman izin verirse öğrencilerin programı [Forever] bloğu olmadan çalıştırmasını sağlayabilirsiniz.
Adım 1: Kontrolör Programlama
[Forever] bloğu kullanmanın faydaları nelerdir? Bu projeyi [Forever] bloğu olmadan aşağıda gösterildiği gibi
oluşturun:
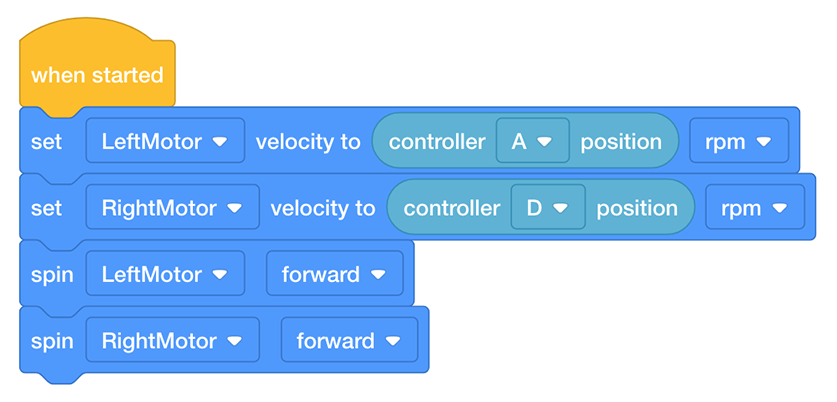
Bu program çalıştırılsaydı sizce ne olurdu? Grup olarak tartışın. Kaydedici, ekibin tahminini mühendislik defterine yazmalıdır.
![]() Öğretmen Araç Kutusu
- Bloğu
Anlama
Öğretmen Araç Kutusu
- Bloğu
Anlama
[Forever] döngüsü olmadan, her motor için hız değeri proje çalıştırılır çalıştırılmaz ayarlanır ve bu değer proje durdurulana kadar sabit kalır. Başka bir deyişle, projeyi iki Joystick'ten birini hareket ettirmeden çalıştırırsanız, Joystick'in ekseni üzerindeki varsayılan konumu 0 olduğu için, Joystick'i hareket ettirseniz bile her iki motorun hızı 0 'da kalacaktır.
Aynı şekilde, sol Joystick'i A ekseni boyunca ilerleyeceği kadar yukarı hareket ettirdiğinizi ve orada tuttuğunuzu varsayalım. Yukarıdaki projeyi çalıştırırsanız, sol motor tam hızda hareket edecek ve Joystick'i A ekseni boyunca aşağı hareket ettirseniz bile bu hızda kalacaktır. Bunun nedeni, Clawbot'un proje çalıştırılır çalıştırılmaz Kontrolörden ilk talimatını almasıdır; ancak, bir Döngü olmadan, bu başlangıç değeri güncellenemez.
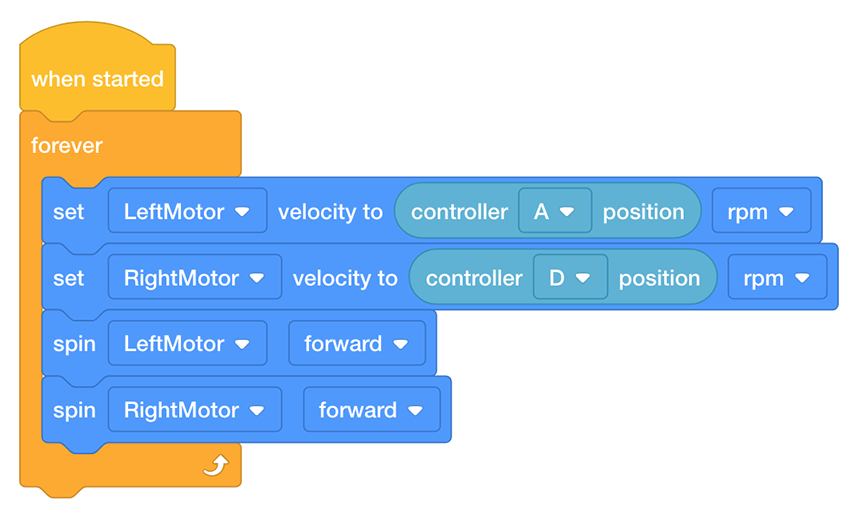
[Forever] döngüsü, Clawbot'a hızı sürekli güncellemesini ve proje süresi boyunca çalışmasını söyler. Başka bir deyişle, bu projedeki [Forever] döngüsü, Joystick'i A veya D ekseni boyunca hareket ettirerek her motorun hızını değiştirmenizi sağlar ve siz projeyi durdurana veya Clawbot'u kapatana kadar Clawbot buna göre yanıt verecektir.
2. Adım: Slalom Kursunda Gezinme

Artık Denetleyici eşleştirildiğine ve proje indirildiğine göre, Denetleyiciyi kullanarak Clawbot'unuzu taşımaya hazırsınız!
- Yapımcı ve Programcı, slalomunuzda bayrak olarak kullanacağınız dört sınıf öğesini öğretmenden toplamalıdır.
- Slalom diyagramına göre İnşaatçı, Programcı ve Kaydedici, Sürücünün Clawbot'ta gezinmesi için bunları yerleştirmek üzere işbirliği yapmalıdır.
- Sürücü, clawbotController projesini indirmelidir. Bir projenin nasıl indirileceği hakkında herhangi bir sorunuz varsa, Proje İndirme ve Çalıştırma eğitimine göz atın.
![]() Öğretmen Araç Kutusu
- Yarışmayı
Ayarlama
Öğretmen Araç Kutusu
- Yarışmayı
Ayarlama
Clawbot'u her "bayrağın" dışında hareket ettirmek için Denetleyiciyi kullanarak öğrencilerin bu slalomu tamamlamasını sağlayın. Clawbot'un yolu herhangi bir bayrağa dokunmasını engellemeli ve bitiş çizgisini geçmesine izin vermelidir. Bayraklar, elinizdeki herhangi bir sınıf materyali/nesnesi olabilir (silgi, bant rulosu, kağıt mendil kutusu) ve Clawbot'u çalıştırmadan önce yerleştirilebilir.
- Zaman izin verirse, öğrencilere Clawbot'u kullanma fırsatı vermek için rollerini değiştirmelerini sağlayın. Bunu, her sürücünün slalomda ne kadar hızlı gidebileceğini görerek gruplar içinde veya gruplar arasında bir yarışmaya bile dönüştürebilirsiniz.
-
Slalom kursu ile bir sınıf yarışmasının nasıl düzenleneceği hakkında bilgi için aşağıya tıklayın.
Adım 3: Robo - Slalom
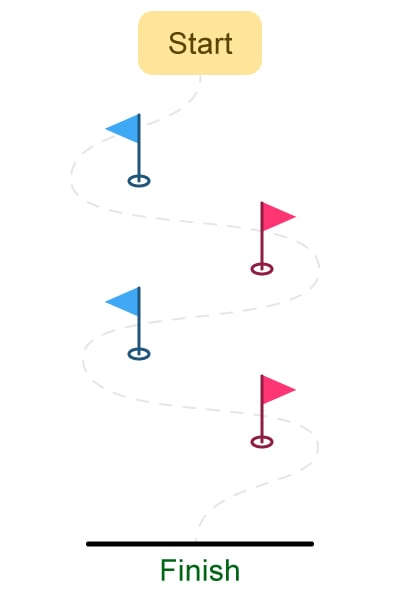
Clawbot'unu her "bayrağın" dışında hareket ettirmek için Denetleyiciyi kullan. Robotun yolu herhangi bir bayrağa dokunmasını engellemeli ve bitiş çizgisini geçmesine izin vermelidir.
- Sürücü, projeyi yürütmeli ve Clawbot'u ileri ve geri sürmeli ve her iki Joystick'i kullanarak sola ve sağa dönmelidir.
- Kaydedici, Clawbot'un kursu tamamlamasının ne kadar sürdüğünü zamanlamalıdır. Zamanları mühendislik defterine kaydedin.
- Clawbot'u Slalom kursundan ne kadar hızlı geçirebilirsin?
![]() Motive Edici Tartışma
- Etkinlik
Üzerine Düşünme
Motive Edici Tartışma
- Etkinlik
Üzerine Düşünme
S: Clawbot, Kontrolöre beklediğiniz gibi yanıt verdi mi?
Y: Cevaplar değişecektir; ancak, bu sorunun amacı bilişsel düşünmeyi teşvik etmektir. Öğrenciler davranışlarını test etmeden önce tahmin ederek, sonuçlarını belgeleyerek ve düşünerek başlamışlardır.
S: Clawbot'u düz bir çizgide ileri veya geri hareket ettirmedeki en büyük zorluk nedir?
C: Cevaplar değişebilse de, Clawbot'un motorlarının aynı yönde ve aynı hızda hareket etmesini sağlamak için her iki Joystick'in de birbiriyle senkronize hareket etmesi gerektiği ortak bir yanıt olmalıdır.
S: [Forever] döngüsünü kullanmak, Clawbot'u hareket ettirmek için Denetleyiciyi sürekli olarak kullanmanızı nasıl sağlar?
C: [Forever] döngüsü olmadan, Clawbot yalnızca projedeki bloklar tarafından belirlenen davranışları bir kez gerçekleştirir. [Forever] döngüsü, Clawbot'a hızı sürekli güncellemesini ve proje süresi boyunca çalışmasını söyler. Başka bir deyişle, [Forever] döngüsü, Clawbot'u süresiz olarak veya pil bitene kadar hareket ettirmek için Denetleyiciyi kullanmanızı sağlar.