
Controller-Erkundung - Teil 3
![]() Lehrer-Toolbox
-
[Für immer] Blöcke
Lehrer-Toolbox
-
[Für immer] Blöcke
In diesem Schritt wird die Bedeutung des Blocks [Für immer] besprochen. Sie sollten die Informationen als Klasse überprüfen. Sie können das Verhalten mit Ihrem Clawbot und Controller modellieren oder, wenn es die Zeit zulässt, die Schüler das Programm ohne den Block [Forever] ausführen lassen.
Schritt 1: Controller-Programmierung
Was sind die Vorteile der Verwendung eines [Forever] -Blocks?
Erstellen Sie
dieses Projekt wie unten gezeigt ohne den [Forever] -Block:
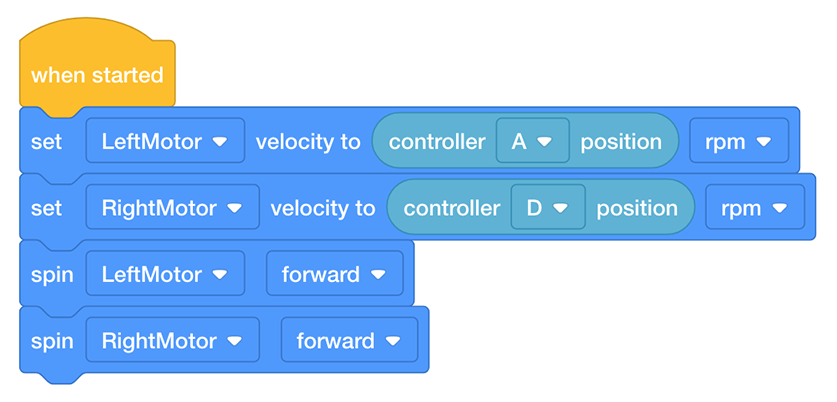
Was würde Ihrer Meinung nach passieren, wenn dieses Programm ausgeführt würde? Diskutieren Sie als Gruppe. Der Recorder sollte die Vorhersage des Teams im technischen Notizbuch notieren.
![]() Lehrer-Toolbox
-
Den Block verstehen
Lehrer-Toolbox
-
Den Block verstehen
Ohne die [Forever] -Schleife wird der Wert der Geschwindigkeit für jeden Motor
festgelegt, sobald das Projekt ausgeführt wird, und dieser Wert bleibt konstant, bis das
Projekt gestoppt wird. Mit anderen Worten, wenn Sie das Projekt ausführen, ohne einen
Joystick zu bewegen, weil die Standardposition des Joysticks auf seiner Achse 0 ist,
bleibt die Geschwindigkeit beider Motoren auf 0, selbst wenn Sie den Joystick
bewegen.
Nehmen wir an, Sie bewegen den linken Joystick so weit nach oben, dass
er entlang seiner A-Achse verläuft, und halten ihn dort. Wenn Sie das obige Projekt
ausführen, bewegt sich der linke Motor mit voller Geschwindigkeit und bleibt bei dieser
Geschwindigkeit, auch wenn Sie den Joystick entlang der A-Achse nach unten bewegen. Dies
liegt daran, dass Clawbot seine erste Anweisung vom Controller erhält, sobald das
Projekt ausgeführt wird. Ohne eine Schleife kann dieser Anfangswert jedoch nicht
aktualisiert werden.
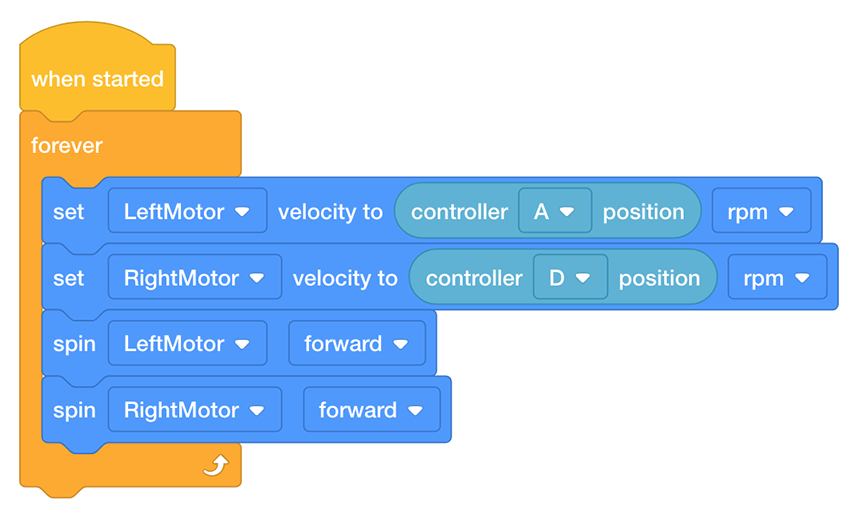
Die [Forever] -Schleife weist den Clawbot an, die
Geschwindigkeit ständig zu aktualisieren und für die Dauer des Projekts auszuführen. Mit
anderen Worten, die [Forever] -Schleife in diesem Projekt ermöglicht es Ihnen,
die Geschwindigkeit jedes Motors zu ändern, indem Sie entweder den Joystick entlang der
A- oder D-Achse bewegen, und der Clawbot reagiert entsprechend, bis Sie das Projekt
stoppen oder den Clawbot ausschalten.
Schritt 2: Durch einen Slalomkurs navigieren

Jetzt, da der Controller gekoppelt ist und das Projekt heruntergeladen wurde, können Sie Ihren Clawbot mit dem Controller verschieben!
- Der Erbauer und der Programmierer sollten die vier Unterrichtsgegenstände, die Sie als Flaggen in Ihrem Slalom verwenden, vom Lehrer abholen.
- Der Builder, der Programmierer und der Recorder sollten zusammenarbeiten, um sie so einzurichten, dass der Fahrer den Clawbot gemäß dem Slalomdiagramm navigieren kann.
- Der Treiber sollte das Projekt clawbotController herunterladen. Wenn Sie Fragen zum Herunterladen eines Projekts haben, lesen Sie das Tutorial zum Herunterladen und Ausführen eines Projekts.
![]() Lehrer-Toolbox
-
Einrichten der Herausforderung
Lehrer-Toolbox
-
Einrichten der Herausforderung
Lassen Sie die Schüler diesen Slalom abschließen, indem Sie den Controller verwenden, um den Greiferbot an der Außenseite jeder „Flagge“ entlang zu bewegen. Der Weg des Greiferbots muss verhindern, dass er eine Flagge berührt, und ihm erlauben, die Ziellinie zu überqueren. Flaggen können jedes Unterrichtsmaterial/Objekt sein, das Sie zur Hand haben (Radiergummi, Klebebandrolle, Tissue-Box) und können vor dem Betrieb des Clawbot angebracht werden.
- Wenn es die Zeit erlaubt, lassen Sie die Schüler die Rollen wechseln, um anderen die Möglichkeit zu geben, den Clawbot zu fahren. Sie könnten dies sogar zu einem Wettbewerb innerhalb von Gruppen oder zwischen Gruppen machen, indem Sie sehen, wie schnell jeder Fahrer im Slalom navigieren kann.
-
Informationen zur Organisation eines Klassenwettbewerbs mit dem Slalomkurs finden Sie unten.
Google Doc / .docx / .pdf
Schritt 3: Robo-Slalom
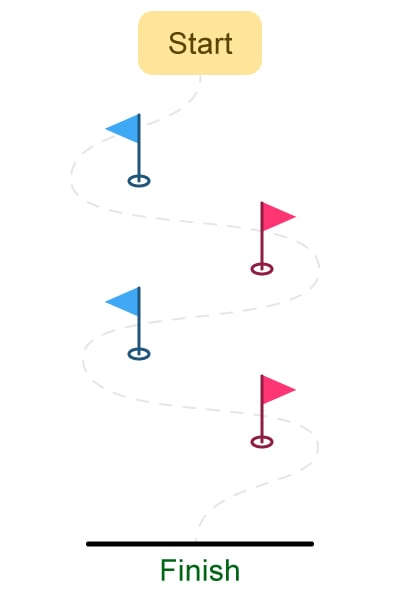
Verwenden Sie den Controller, um Ihren Clawbot an der Außenseite jeder „Flagge“ entlang zu bewegen. Der Weg des Roboters muss verhindern, dass er eine Fahne berührt, und ihm erlauben, die Ziellinie zu überqueren.
- Der Fahrer sollte das Projekt ausführen und den Clawbot vorwärts und rückwärts fahren und mit beiden Joysticks nach links und rechts abbiegen.
- Der Recorder sollte sich die Zeit nehmen, die der Clawbot benötigt, um den Kurs abzuschließen. Dokumentieren Sie die Zeiten im Engineering-Notizbuch.
- Wie schnell kannst du Clawbot durch den Slalomkurs bringen?
![]() Diskussion motivieren
-
Über die Aktivität nachdenken
Diskussion motivieren
-
Über die Aktivität nachdenken
F: Hat der Clawbot so auf den Controller reagiert, wie Sie es
erwartet haben?
A: Die Antworten werden variieren; das Ziel dieser Frage ist
jedoch, das kognitive Denken zu fördern. Die Schüler begannen damit, Verhaltensweisen
vorherzusagen, bevor sie sie testeten, ihre Ergebnisse dokumentierten und reflektierten.
F: Was ist die größte Herausforderung, wenn es darum geht, den
Clawbot in einer geraden Linie vorwärts oder rückwärts zu bewegen?
A: Obwohl die Antworten variieren können, sollte eine gemeinsame
Antwort sein, dass sich beide Joysticks synchron zueinander bewegen müssen, um
sicherzustellen, dass sich die Motoren des Clawbots in die gleiche Richtung und mit der
gleichen Geschwindigkeit bewegen.
F: Wie ermöglicht Ihnen die Verwendung der [Forever]
-Schleife, den Controller kontinuierlich zu verwenden, um den Clawbot zu bewegen?
A: Ohne die [Forever] -Schleife würde der Clawbot die
Verhaltensweisen, die durch die Blöcke im Projekt bestimmt werden, nur einmal ausführen.
Die [Forever] -Schleife weist den Clawbot an, die Geschwindigkeit ständig zu
aktualisieren und für die Dauer des Projekts auszuführen. Mit anderen Worten,
die [Forever] -Schleife ermöglicht es Ihnen, den Controller zu verwenden, um
den Clawbot unbegrenzt zu bewegen oder bis der Akku leer ist.