
Exploration du contrôleur - Partie 3
![]() Boîte à outils de l'enseignant
- Blocs
[Forever]
Boîte à outils de l'enseignant
- Blocs
[Forever]
Cette étape traite de l'importance du bloc [Forever]. Vous devriez examiner les informations en tant que classe. Vous pouvez modéliser le comportement avec votre Clawbot et votre contrôleur, ou si le temps le permet, demandez aux élèves d'exécuter le programme sans le bloc [Forever].
Étape 1 : Programmation du contrôleur
Quels sont les avantages d'utiliser un bloc [Forever] ?
Construisez ce projet
comme indiqué ci-dessous sans le bloc [Forever] :
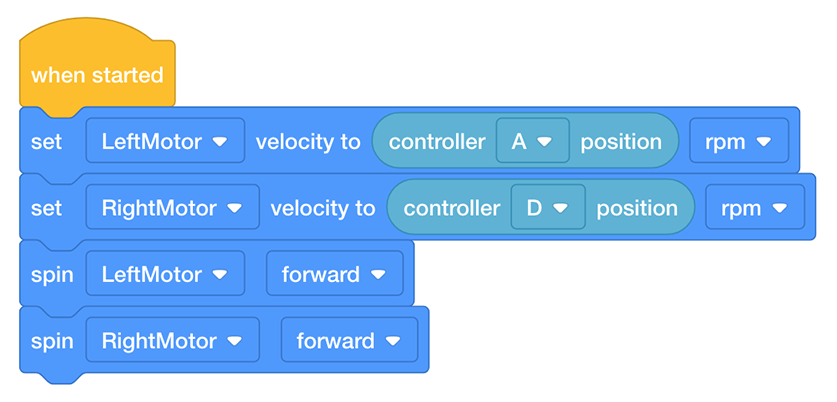
Selon vous, que se passerait-il si ce programme était exécuté ? Discutez-en en groupe. L'enregistreur doit noter la prédiction de l'équipe dans le cahier d'ingénierie.
![]() Boîte à outils de l'enseignant
-
Comprendre le bloc
Boîte à outils de l'enseignant
-
Comprendre le bloc
Sans la boucle [Forever], la valeur de la vitesse pour chaque moteur est définie dès
que le projet est exécuté, et cette valeur reste constante jusqu'à l'arrêt du projet. En
d'autres termes, si vous exécutez le projet sans déplacer l'un ou l'autre joystick, car
la position par défaut du joystick sur son axe est 0, la vitesse des deux moteurs
restera à 0, même si vous déplacez le joystick.
De même, supposons que vous
déplaciez le joystick gauche vers le haut aussi loin qu'il ira le long de son axe A et
que vous le mainteniez là. Si vous exécutez le projet ci-dessus, le moteur gauche se
déplacera à pleine vitesse et restera à cette vitesse même si vous déplacez le joystick
vers le bas le long de l'axe A. En effet, Clawbot reçoit ses instructions initiales du
contrôleur dès que le projet est exécuté ; cependant, sans boucle, cette valeur initiale
ne peut pas être mise à jour.
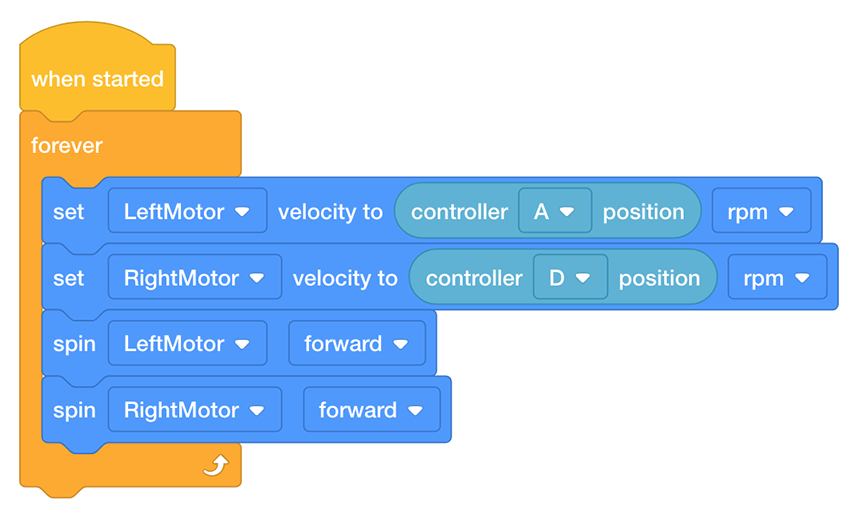
La boucle [Forever] indique au Clawbot de
mettre à jour constamment la vitesse et de fonctionner pendant toute la durée du projet.
En d'autres termes, la boucle [Forever], dans ce projet, vous permet de
modifier la vitesse de chaque moteur en déplaçant le joystick le long de l'axe A ou D,
et le Clawbot répondra en conséquence jusqu'à ce que vous arrêtiez le projet ou
éteigniez le Clawbot.
Étape 2 : Naviguer dans un cours de slalom
 Les
Les
Maintenant que le contrôleur est jumelé et que le projet est téléchargé, vous êtes prêt à déplacer votre Clawbot à l'aide du contrôleur !
- Le constructeur et le programmeur doivent collecter les quatre objets de classe que vous utiliserez comme drapeaux dans votre slalom auprès de l'enseignant.
- Le constructeur, le programmeur et l'enregistreur doivent collaborer pour les mettre en place afin que le conducteur puisse naviguer dans le Clawbot, selon le diagramme de slalom.
- Le pilote doit télécharger le projet clawbotController. Si vous avez des questions sur la façon de télécharger un projet, consultez le didacticiel Télécharger et exécuter un projet.
![]() Boîte à outils de l'enseignant
-
Mettre en place le défi
Boîte à outils de l'enseignant
-
Mettre en place le défi
Demandez aux élèves de terminer ce slalom en utilisant le contrôleur pour déplacer le Clawbot le long de l'extérieur de chaque « drapeau ». Le chemin du Clawbot doit l'empêcher de toucher un drapeau et lui permettre de franchir la ligne d'arrivée. Les drapeaux peuvent être tout matériel/objet de classe que vous avez à portée de main (gomme, rouleau de ruban adhésif, boîte à mouchoirs) et peuvent être mis en place avant d'utiliser le Clawbot.
- Si le temps le permet, demandez aux élèves de changer de rôle pour donner aux autres la possibilité de conduire le Clawbot. Vous pouvez même transformer cela en une compétition au sein des groupes ou entre les groupes en voyant à quelle vitesse chaque pilote peut naviguer sur le slalom.
-
Pour plus d'informations sur l'organisation d'un concours en classe avec le cours de slalom, cliquez ci-dessous.
Google Doc / .docx / .pdf
Étape 3 : Robo-Slalom
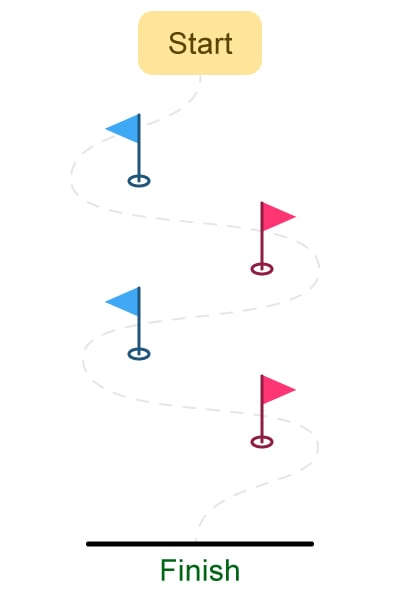
Utilisez le contrôleur pour déplacer votre Clawbot le long de l'extérieur de chaque « drapeau ». La trajectoire du robot doit l'empêcher de toucher un drapeau et lui permettre de franchir la ligne d'arrivée.
- Le conducteur doit exécuter le projet et faire avancer et reculer le Clawbot, puis tourner à gauche et à droite à l'aide des deux joysticks.
- L'enregistreur doit déterminer combien de temps il faut au Clawbot pour terminer le cours. Documenter les heures dans le cahier d'ingénierie.
- À quelle vitesse pouvez-vous faire suivre le cours de slalom à Clawbot ?
![]() Motiver la discussion
-
Réfléchir à l'activité
Motiver la discussion
-
Réfléchir à l'activité
Q : Le Clawbot a-t-il répondu au contrôleur comme vous vous y
attendiez ?
R : Les réponses varieront ; cependant, le but de cette question
est de promouvoir la pensée cognitive. Les élèves ont commencé par prédire les
comportements avant de les tester, de documenter leurs résultats et de réfléchir.
Q : Quel est le plus grand défi pour faire avancer ou reculer le
Clawbot en ligne droite ?
R : Bien que les réponses puissent varier, une réponse commune
devrait être que les deux joysticks doivent se déplacer en synchronisation l'un avec
l'autre pour s'assurer que les moteurs du Clawbot se déplacent dans la même direction et
à la même vitesse.
Q : Comment l'utilisation de la boucle [Forever] vous
permet-elle d'utiliser en permanence le contrôleur pour déplacer le Clawbot ?
R : Sans la boucle [Forever], le Clawbot n'exécuterait
les comportements déterminés par les blocs du projet qu'une seule fois.
La boucle [Forever] indique au Clawbot de mettre à jour constamment la vitesse
et de fonctionner pendant toute la durée du projet. En d'autres termes,
la boucle [Forever] vous permet d'utiliser le contrôleur pour déplacer le
Clawbot indéfiniment, ou jusqu'à ce que la batterie meure.