
Controllerverkenning - Deel 3
![]() Teacher Toolbox
-
[Forever] Blocks
Teacher Toolbox
-
[Forever] Blocks
Deze stap bespreekt het belang van het [Forever] blok. Je moet de informatie als een klas bekijken. Je kunt het gedrag modelleren met je Clawbot en Controller, of als de tijd het toelaat, de studenten het programma laten uitvoeren zonder het [Forever] -blok.
Stap 1: Controllerprogrammering
Wat zijn de voordelen van het gebruik van een [Forever] -blok?
Bouw dit project zoals hieronder weergegeven zonder het [Forever] -blok:
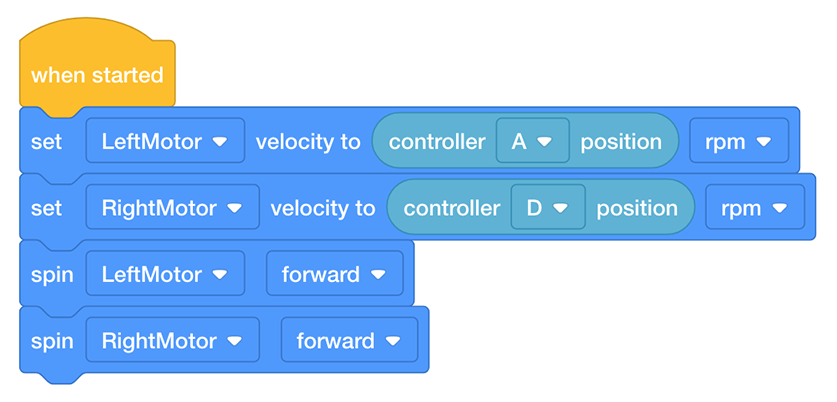
Wat denk je dat er zou gebeuren als dit programma werd uitgevoerd? Bespreek als groep. De recorder moet de voorspelling van het team noteren in het technische notitieblok.
![]() Teacher Toolbox
-
Het blok begrijpen
Teacher Toolbox
-
Het blok begrijpen
Zonder de [Forever] -lus wordt de snelheidswaarde voor elke motor ingesteld zodra het project wordt uitgevoerd, en die waarde blijft constant totdat het project wordt gestopt. Met andere woorden, als u het project uitvoert zonder de joystick te verplaatsen, omdat de standaardpositie van de joystick op de as 0 is, blijft de snelheid van beide motoren op 0, zelfs als u de joystick verplaatst.
Evenzo, laten we zeggen dat je de linker joystick zover omhoog beweegt als hij langs zijn A-as gaat en hem daar vasthoudt. Als u het bovenstaande project uitvoert, zal de linkermotor op volle snelheid bewegen en op die snelheid blijven, zelfs als u de joystick langs de A-as naar beneden beweegt. Dit komt omdat Clawbot zijn initiële instructie van de Controller ontvangt zodra het project wordt uitgevoerd; zonder een Loop kan die initiële waarde echter niet worden bijgewerkt.
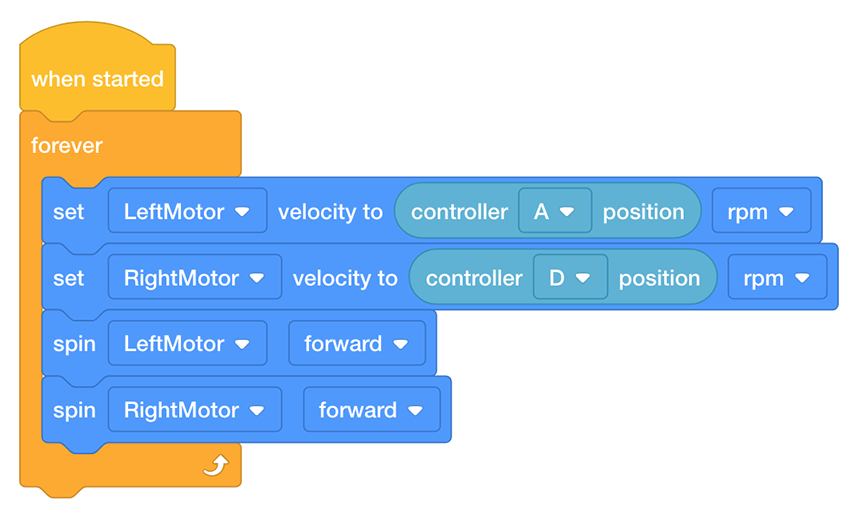
De [Forever] -lus vertelt de Clawbot om de snelheid voortdurend bij te werken en gedurende het project te draaien. Met andere woorden, met de [Forever] -lus kunt u in dit project de snelheid van elke motor wijzigen door de joystick langs de A- of D-as te bewegen, en de Clawbot zal dienovereenkomstig reageren totdat u het project stopt of de Clawbot uitschakelt.
Stap 2: Navigeer door een slalomcursus

Nu de Controller is gekoppeld en het project is gedownload, bent u klaar om uw Clawbot te verplaatsen met behulp van de Controller!
- De Bouwer en de Programmeur moeten de vier klaslokaalitems verzamelen die je als vlaggen in je slalom zult gebruiken bij de leraar.
- De Bouwer, Programmeur en Recorder moeten samenwerken om ze op hun plaats te zetten zodat de Chauffeur door de Clawbot kan navigeren, volgens het slalomdiagram.
- De chauffeur moet het clawbotController-project downloaden. Als er vragen zijn over het downloaden van een project, bekijk dan de tutorial Download and Run a Project.
![]() Teacher Toolbox
-
De uitdaging opzetten
Teacher Toolbox
-
De uitdaging opzetten
Laat de leerlingen deze slalom voltooien door de controller te gebruiken om de Clawbot langs de buitenkant van elke "vlag" te bewegen. Het pad van de Clawbot moet voorkomen dat hij een vlag raakt en hem de finishlijn laten passeren. Vlaggen kunnen elk materiaal/object in het klaslokaal zijn dat u bij de hand hebt (gum, rol tape, tissuebox) en kunnen op hun plaats worden gezet voordat u de Clawbot bedient.
- Als de tijd het toelaat, laat de leerlingen van rol wisselen om anderen de kans te geven om de Clawbot te besturen. Je zou dit zelfs kunnen omzetten in een wedstrijd binnen groepen of tussen groepen door te zien hoe snel elke coureur op de slalom kan navigeren.
-
Klik hieronder voor informatie over het organiseren van een klassikale wedstrijd met de slalomcursus.
Google Doc / .docx / .pdf
Stap 3: Robo-Slalom

Gebruik de Controller om uw Clawbot langs de buitenkant van elke "vlag" te verplaatsen. Het pad van de robot moet voorkomen dat hij een vlag raakt en hem de finishlijn laten passeren.
- De chauffeur moet het project uitvoeren en de Clawbot vooruit en achteruit rijden en met beide joysticks naar links en rechts draaien.
- De recorder moet tijd geven hoe lang het duurt voordat de klauwbot de cursus heeft voltooid. Noteer de tijden in het engineeringsnotitieblok.
- Hoe snel kun je Clawbot door de Slalom-cursus krijgen?
![]() Motiveer discussie
-
Reflecteren op de activiteit
Motiveer discussie
-
Reflecteren op de activiteit
V: Reageerde de Clawbot op de Controller zoals u verwachtte?
A: Antwoorden zullen variëren; het doel van deze vraag is echter om cognitief denken te bevorderen. Studenten begonnen met het voorspellen van gedrag voordat ze het testten, hun resultaten documenteerden en reflecteerden.
V: Wat is de grootste uitdaging om de Clawbot in een rechte lijn vooruit of achteruit te bewegen?
A: Hoewel de antwoorden kunnen variëren, moet een gemeenschappelijk antwoord zijn dat beide joysticks synchroon met elkaar moeten bewegen om ervoor te zorgen dat de motoren van de Clawbot in dezelfde richting en met dezelfde snelheid bewegen.
V: Hoe stelt het gebruik van de [Forever] -lus u in staat om de Controller continu te gebruiken om de Clawbot te verplaatsen?
A: Zonder de [Forever] -lus zou de Clawbot het gedrag zoals bepaald door de blokken in het project slechts één keer uitvoeren. De [Forever] -lus vertelt de Clawbot om de snelheid voortdurend bij te werken en gedurende het project te draaien. Met andere woorden, met de [Forever] -lus kunt u de Controller gebruiken om de Clawbot voor onbepaalde tijd te verplaatsen, of totdat de batterij leeg is.