
Controller Exploration - Part 3
Step 1: Controller Programming
What are the benefits of using a [Forever] block?
Build this project as shown below without the [Forever] block:
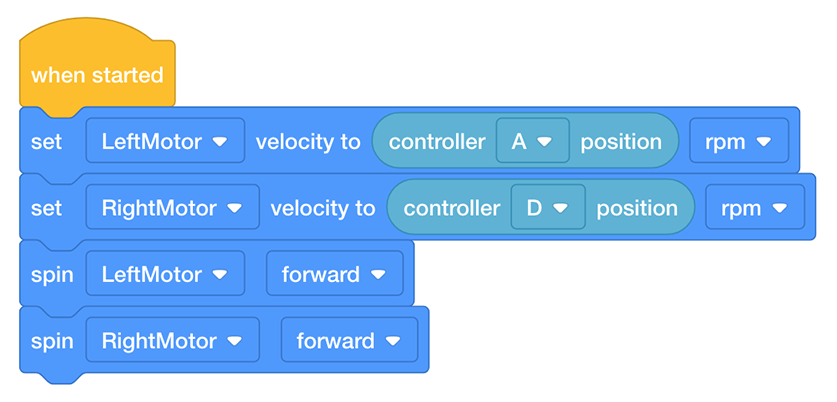
What do you think would happen if this program were run? Discuss as a group. The Recorder should write down the team’s prediction in the engineering notebook.
Step 2: Navigate a Slalom Course

Now that the Controller is paired and the project is downloaded, you are ready to move your Clawbot using the Controller!
- The Builder and the Programmer should collect the four classroom items you will use as flags in your slalom from the teacher.
- The Builder, Programmer, and Recorder should collaborate to set them in place for the Driver to navigate the Clawbot around, according to the slalom diagram.
- The Driver should download the clawbotController project. If there are any questions about how to download a project, check out the Download and Run a Project tutorial.
Step 3: Robo-Slalom
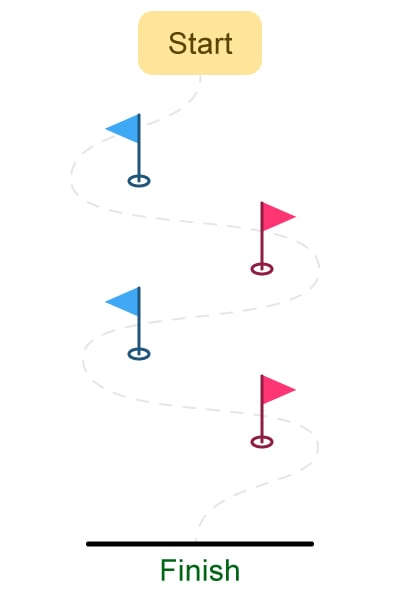
Use the Controller to move your Clawbot along the outside of each “flag.” The robot’s path must prevent it from touching any flag, and allow it to cross the finish line.
- The Driver should run the project and drive the Clawbot forward and reverse, and turn left and right using both Joysticks.
- The Recorder should time how long it takes for the Clawbot to complete the course. Document the times in the engineering notebook.
- How fast can you get Clawbot through the Slalom course?