
![]() 教師用ツールボックス
-
[Forever] ブロック
教師用ツールボックス
-
[Forever] ブロック
このステップでは、 [Forever] ブロックの重要性について説明します。 クラス全体で情報を確認する必要があります。 クローボットとコントローラーを使用して動作をモデル化することも、時間に余裕があれば、生徒に [Forever] ブロックなしでプログラムを実行させることもできます。
ステップ 1: コントローラーのプログラミング
[Forever] ブロックを使用する利点は何ですか?
[Forever] ブロックなしで、以下のようにこのプロジェクトをビルドします。
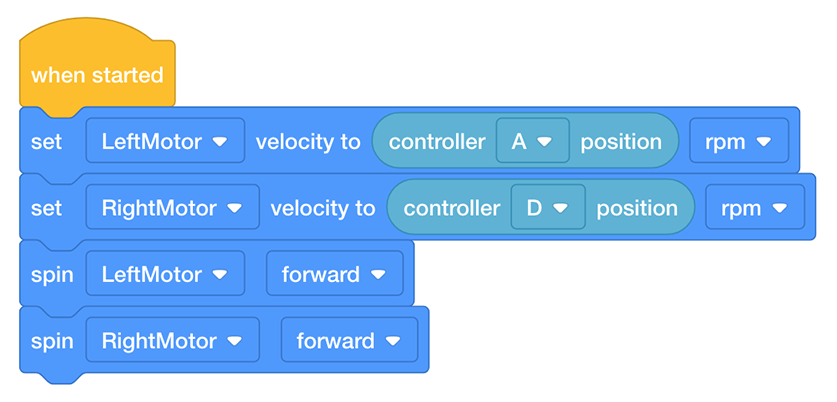
このプログラムが実行されたらどうなると思いますか? グループで話し合います。 記録者はチームの予測をエンジニアリング ノートに書き留める必要があります。
![]() 教師用ツールボックス
-
ブロックを理解する
教師用ツールボックス
-
ブロックを理解する
[Forever] ループがない場合、各モーターの速度の値はプロジェクトの実行後すぐに設定され、プロジェクトが停止されるまでその値は一定のままになります。 つまり、どちらのジョイスティックも動かさずにプロジェクトを実行した場合、ジョイスティックの軸上のデフォルトの位置は 0 であるため、ジョイスティックを動かしても両方のモーターの速度は 0 のままになります。
同様に、左のジョイスティックを A 軸に沿ってできるだけ上に移動し、そこに保持したとします。 上記のプロジェクトを実行すると、左側のモーターが最高速度で動き、ジョイスティックを A 軸に沿って下に動かしてもその速度が維持されます。 これは、Clawbot がプロジェクトが実行されるとすぐにコントローラーから最初の命令を受け取るためです。ただし、ループがないと、その初期値は更新できません。
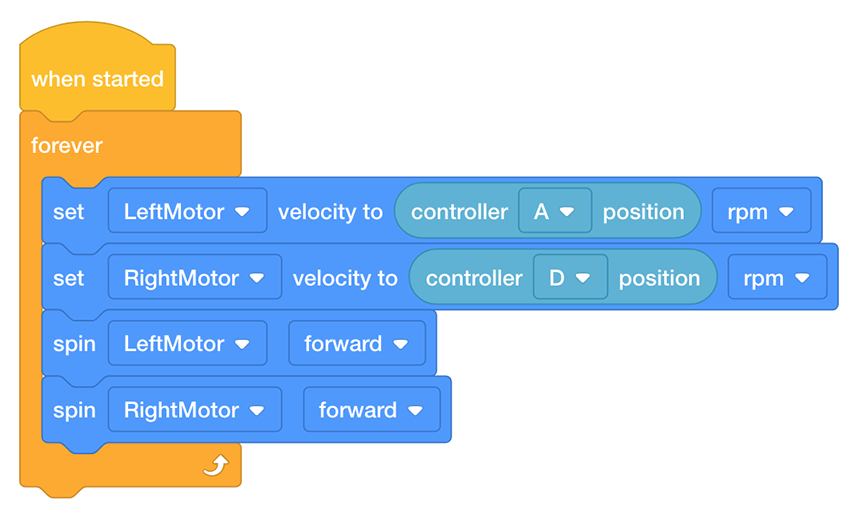
[Forever] ループは、Clawbot に速度を常に更新し、プロジェクトの期間中実行するように指示します。 つまり、このプロジェクトの [Forever] ループでは、ジョイスティックを A 軸または D 軸に沿って動かすことで各モーターの速度を変更でき、プロジェクトを停止するか Clawbot をオフにするまで、Clawbot はそれに応じて反応します。
ステップ 2: スラローム コースをナビゲートする

コントローラーがペアリングされ 、プロジェクトが ダウンロードされたので、コントローラーを使用して Clawbot を動かす準備が整いました。
-
ビルダーとプログラマーは、スラロームで旗として使用する 4 つの教室用アイテムを教師から収集する必要があります。
-
ビルダー、プログラマー、およびレコーダーは、ドライバーがスラローム ダイアグラムに従って Clawbot をナビゲートできるように、それらを適切な位置に設定するために協力する必要があります。
-
ドライバーは、clawbotController プロジェクトをダウンロードする必要があります。 プロジェクトのダウンロード方法について質問がある場合は、「プロジェクトのダウンロードと実行」チュートリアルを参照してください。
![]() 教師ツールボックス
-
チャレンジの設定
教師ツールボックス
-
チャレンジの設定
生徒たちに、コントローラを使用してクローボットを各「旗」の外側に沿って移動させ、このスラロームを完了させます。 Clawbot のパスは、フラッグに触れることを防ぎ、ゴールラインを通過できるようにする必要があります。 フラグは、手元にある教室の資料/オブジェクト (消しゴム、テープのロール、ティッシュの箱) であれば何でもよく、Clawbot を操作する前に所定の位置に設定できます。
-
時間が許せば、生徒に役割を交代してもらい、他の生徒に Clawbot を操作する機会を与えます。 各ドライバーがどれだけ速くスラロームを操縦できるかを確認することで、これをグループ内またはグループ間の競争に変えることもできます。
-
スラロームコースを使った教室競技会の開催方法については、以下をクリックして 。
ステップ3: ロボスラローム
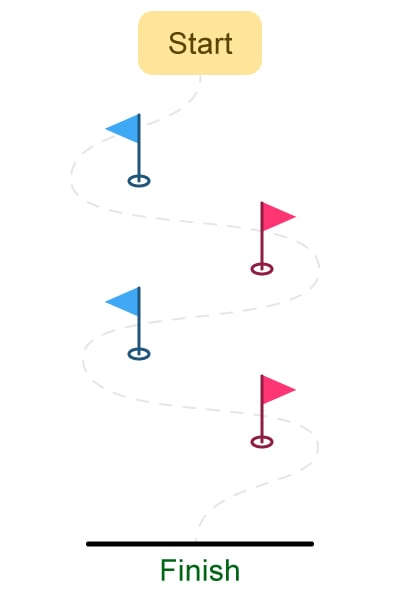
コントローラーを使用して、Clawbot を各「旗」の外側に沿って移動します。 ロボットの経路は、旗に触れることを防ぎ、ゴールラインを通過できるようにする必要があります。
-
ドライバーはプロジェクトを実行し、両方のジョイスティックを使用して Clawbot を前進および後進し、左右に回転させる必要があります。
-
Recorder は、Clawbot がコースを完了するまでにかかる時間を測定する必要があります。 エンジニアリングノートに時間を記録します。
-
スラローム コースで Clawbot をどのくらい速く通過できるでしょうか?
![]() ディスカッションを促す
-
活動を振り返る
ディスカッションを促す
-
活動を振り返る
質問: クローボットはコントローラーに対して期待通りに反応しましたか?
回答: 回答はさまざまですが、この質問の目的は認知的思考を促進することです。 学生たちは、行動をテストする前に行動を予測し、その結果を文書化し、振り返ることから始めました。
質問: クローボットを直線的に前進または後進させる上での最大の課題は何ですか?
回答: 答えはさまざまですが、一般的な答えは、クローボットのモーターが同じ方向と同じ速度で動くようにするには、両方のジョイスティックが互いに同期して動く必要があるということです。
質問: [Forever] を使用すると、コントローラーを継続的に使用してクローボットを移動できるようになりますか?
回答: [Forever] がない場合、クローボットはプロジェクト内のブロックによって決定された動作を 1 回だけ実行します。 [Forever] ループは、Clawbot に速度を常に更新し、プロジェクトの期間中実行するように指示します。 つまり、 [永遠] ループにより、コントローラーを使用してクローボットを無期限に、またはバッテリーが切れるまで移動できるようになります。