
![]() Mokytojo įrankių rinkinys
[amžinai
blokai
Mokytojo įrankių rinkinys
[amžinai
blokai
Šiame žingsnyje aptariama [Forever] bloko svarba. Turėtumėte peržiūrėti informaciją kaip klasė. Galite modeliuoti elgesį naudodami „Clawbot“ ir „Controler“ arba, jei laikas leidžia, leiskite mokiniams paleisti programą be [Forever] bloko.
1 veiksmas: valdiklio programavimas
Kokie yra [Forever] bloko naudojimo pranašumai?
Sukurkite šį projektą, kaip parodyta toliau, be [Forever] bloko:
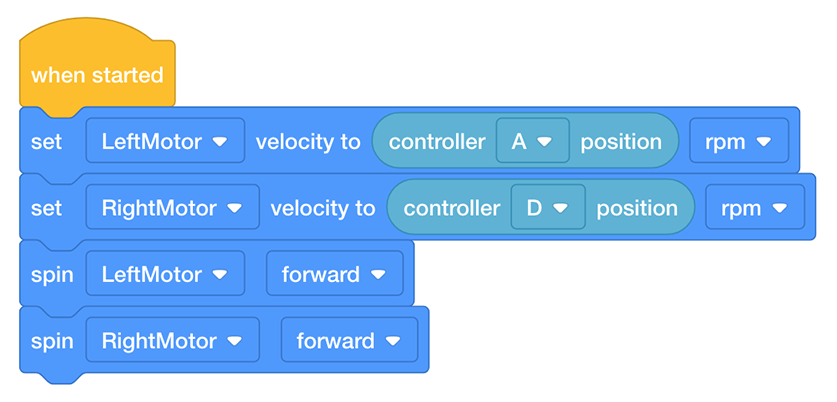
Kaip manote, kas nutiktų, jei ši programa būtų paleista? Aptarkite kaip grupė. Rašytojas turėtų užsirašyti komandos prognozę į inžinerijos sąsiuvinį.
![]() Mokytojo įrankių rinkinys
-
Bloko supratimas
Mokytojo įrankių rinkinys
-
Bloko supratimas
Be [Forever] kilpos, kiekvieno variklio greičio reikšmė nustatoma iškart, kai tik projektas vykdomas, ir ši vertė išlieka pastovi, kol projektas sustabdomas. Kitaip tariant, jei vykdysite projektą nejudindami nė vienos vairasvirtės, nes numatytoji vairasvirtės padėtis ant jos ašies yra 0, abiejų variklių greitis išliks lygus 0, net jei pajudinsite vairasvirtę.
Panašiai, tarkime, perkeliate kairę vairasvirtę aukštyn, kiek ji eis išilgai savo A ašies, ir laikykite ją ten. Jei vykdysite aukščiau pateiktą projektą, kairysis variklis judės visu greičiu ir išliks tokiu greičiu, net jei vairasvirtę perkelsite žemyn išilgai A ašies. Taip yra todėl, kad „Clawbot“ gauna pirminius nurodymus iš Valdytojo, kai tik projektas pradedamas vykdyti; tačiau be ciklo ši pradinė reikšmė negali būti atnaujinta.
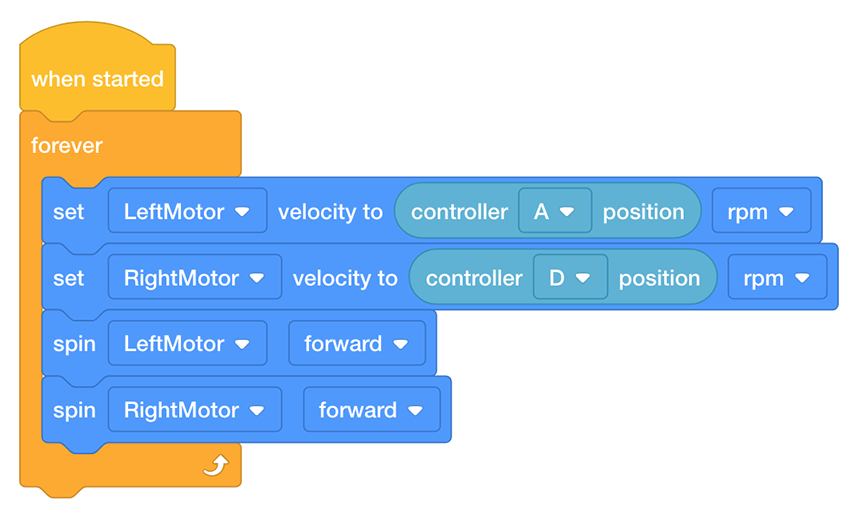
[Forever] kilpa nurodo „Clawbot“ nuolat atnaujinti greitį ir veikti visą projekto laiką. Kitaip tariant, [Forever] kilpa šiame projekte leidžia keisti kiekvieno variklio greitį judinant vairasvirtę išilgai A arba D ašies, o „Clawbot“ atitinkamai reaguos, kol sustabdysite projektą arba išjungsite. „Clawbot“.
2 veiksmas: naršykite slalomo trasą

Dabar, kai valdiklis yra suporuotas ir projektas atsisiųstas, esate pasirengę perkelti savo Clawbot naudodami valdiklį!
-
Statytojas ir programuotojas turėtų paimti iš mokytojo keturis klasės daiktus, kuriuos naudosite kaip vėliavėles savo slalomo metu.
-
Statytojas, Programuotojas ir Įrašytojas turėtų bendradarbiauti, kad nustatytų juos, kad vairuotojas galėtų naršyti „Clawbot“ pagal slalomo schemą.
-
Vairuotojas turėtų atsisiųsti clawbotController projektą. Jei turite klausimų apie tai, kaip atsisiųsti projektą, peržiūrėkite mokymo programą Atsisiųsti ir vykdyti projektą.
![]() Mokytojo įrankių rinkinys
-
Iššūkio nustatymas
Mokytojo įrankių rinkinys
-
Iššūkio nustatymas
Paprašykite mokinių užbaigti šį slalomą, naudodami valdiklį, kad perkeltumėte „Clawbot“ kiekvienos „vėliavos“ išorėje. „Clawbot“ kelias turi neleisti jam liesti jokios vėliavos ir leisti kirsti finišo liniją. Vėliavos gali būti bet kokia klasėje esanti medžiaga / objektas (trintukas, juostelės rulonas, servetėlių dėžutė) ir jas galima nustatyti prieš naudojant „Clawbot“.
-
Jei laikas leidžia, paprašykite mokinių pakeisti vaidmenis, kad kiti galėtų vairuoti „Clawbot“. Jūs netgi galite tai paversti varžybomis grupėse arba tarp grupių, matydami, kaip greitai kiekvienas vairuotojas gali įveikti slalomą.
-
Norėdami gauti informacijos, kaip organizuoti klasės varžybas su slalomo trasa, žemiau.
3 žingsnis: Robo slalomas
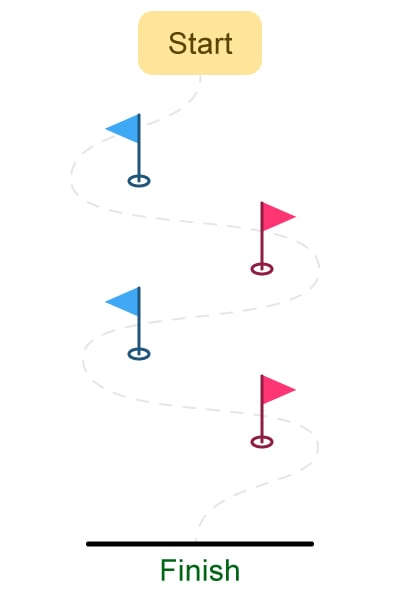
Naudokite valdiklį, kad perkeltumėte savo „Clawbot“ kiekvienos „vėliavos“ išorėje. Roboto kelias turi neleisti jam liesti jokios vėliavos ir leisti kirsti finišo liniją.
-
Vairuotojas turi vykdyti projektą ir vairuoti Clawbot pirmyn ir atbuline eiga bei pasukti į kairę ir į dešinę naudodamas abi vairasvirtes.
-
Įrašytojas turėtų nustatyti, kiek laiko užtrunka Clawbot užbaigti kursą. Įrašykite laikus į inžinerijos sąsiuvinį.
-
Kaip greitai galite gauti Clawbot per slalomo trasą?
![]() Motyvuoti diskusiją
-
Apmąstymas apie veiklą
Motyvuoti diskusiją
-
Apmąstymas apie veiklą
Klausimas: Ar „Clawbot“ reagavo į valdiklį taip, kaip tikėjotės?
A: Atsakymai skirsis; tačiau šio klausimo tikslas – skatinti pažintinį mąstymą. Mokiniai pradėjo numatydami elgesį prieš juos išbandydami, dokumentuodami rezultatus ir apmąstydami.
Klausimas: Koks yra didžiausias iššūkis judant „Clawbot“ tiesia linija pirmyn arba atgal?
A: Nors atsakymai gali skirtis, bendras atsakymas turėtų būti toks, kad abi vairasvirtės turi judėti viena su kita, kad būtų užtikrinta, jog „Clawbot“ varikliai juda ta pačia kryptimi ir tokiu pačiu greičiu.
Klausimas: Kaip naudojant [Forever] kilpą galite nuolat naudoti valdiklį, kad judintumėte „Clawbot“?
A: Be [Forever] kilpos, „Clawbot“ veiksmą, kurį nustato projekto blokai, atliktų tik vieną kartą. [Forever] kilpa nurodo „Clawbot“ nuolat atnaujinti greitį ir veikti visą projekto laiką. Kitaip tariant, [Forever] kilpa leidžia naudoti valdiklį ir perkelti Clawbot neribotą laiką arba tol, kol išsikraus baterija.