
![]() Tanári eszköztár
-
[Örökké] Blocks
Tanári eszköztár
-
[Örökké] Blocks
Ez a lépés a [Forever] blokk fontosságát tárgyalja. Az információkat osztályként kell átnéznie. Modellezheti a viselkedést a Clawbot és a Controller segítségével, vagy ha ideje engedi, futtassa le a tanulókat a [Forever] blokk nélkül.
1. lépés: Vezérlő programozása
Milyen előnyei vannak a [Forever] blokk használatának?
Építse fel ezt a projektet az alábbiak szerint a [Forever] blokk nélkül:
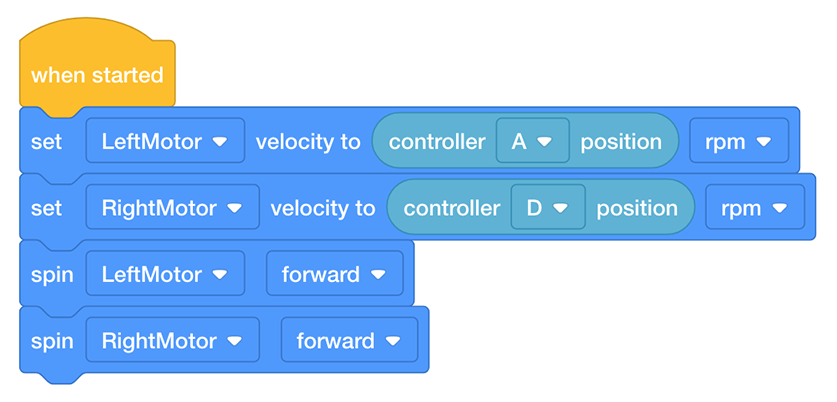
Mit gondol, mi történne, ha ez a program futna? Beszéljétek meg csoportként. A felvevőnek fel kell írnia a csapat előrejelzését a mérnöki jegyzetfüzetbe.
![]() Tanári eszköztár
-
A blokk megértése
Tanári eszköztár
-
A blokk megértése
A [Forever] hurok nélkül a sebesség értéke minden motorhoz azonnal beáll, amint a projekt fut, és ez az érték állandó marad a projekt leállításáig. Más szóval, ha a projektet a Joystick mozgatása nélkül futtatja, mivel a Joystick alapértelmezett pozíciója a tengelyén 0, akkor mindkét motor sebessége 0 marad, még akkor is, ha mozgatja a Joystick-ot.
Hasonlóképpen, tegyük fel, hogy a bal oldali Joystick-et mozgatja felfelé, ameddig az A tengelye mentén halad, és tartsa ott. Ha futtatja a fenti projektet, a bal oldali motor teljes sebességgel fog mozogni, és akkor is ezen a sebességen marad, ha a joystickot lefelé mozgatja az A tengely mentén. Ennek az az oka, hogy a Clawbot azonnal megkapja a kezdeti utasítást a Vezérlőtől, amint a projekt fut; hurok nélkül azonban ez a kezdeti érték nem frissíthető.
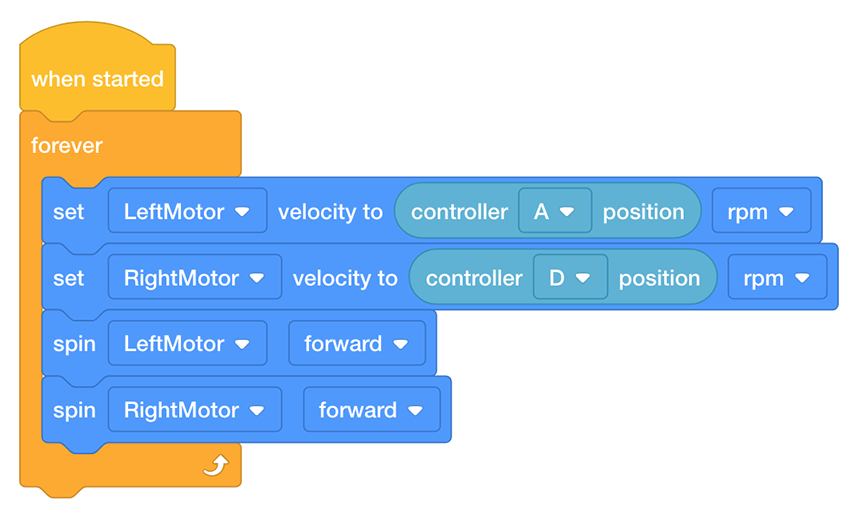
A [Forever] hurok arra utasítja a Clawbotot, hogy folyamatosan frissítse a sebességet, és futtasson a projekt időtartama alatt. Más szavakkal, a [Forever] hurok ebben a projektben lehetővé teszi az egyes motorok sebességének megváltoztatását a Joystick A vagy D tengely mentén történő mozgatásával, és a Clawbot ennek megfelelően reagál, amíg le nem állítja a projektet vagy ki nem kapcsolja. a Clawbot.
2. lépés: Navigáljon egy szlalompályán

Most, hogy a vezérlő párosítva és a projekt letöltve, készen áll a Clawbot mozgatására a Controller segítségével!
-
Az Építőnek és a Programozónak el kell szednie a tanártól azt a négy tantermi tárgyat, amelyet zászlóként fog használni a szlalomban.
-
Az Építőnek, a Programozónak és a Rögzítőnek együtt kell működnie, hogy beállítsa őket, hogy a sofőr a szlalom diagramnak megfelelően navigálhasson a Clawbot körül.
-
Az illesztőprogramnak le kell töltenie a clawbotController projektet. Ha bármilyen kérdése van egy projekt letöltésével kapcsolatban, tekintse meg a Projekt letöltése és futtatása című oktatóanyagot.
![]() Tanári eszköztár
-
A kihívás beállítása
Tanári eszköztár
-
A kihívás beállítása
A tanulók teljesítsék ezt a szlalomot úgy, hogy a Controller segítségével mozgatják a Clawbotot minden egyes „zászló” külső oldalán. A Clawbot útjának meg kell akadályoznia, hogy bármilyen zászlót érintsen, és lehetővé kell tennie, hogy áthaladjon a célvonalon. A zászlók bármilyen tantermi anyag/tárgy lehet, ami kéznél van (radír, szalagtekercs, papírzsebkendő), és a Clawbot működtetése előtt a helyükre állíthatók.
-
Ha az idő engedi, kérje meg a tanulókat, hogy cseréljenek szerepet, hogy mások is vezessék a Clawbotot. Ezt akár csoporton belüli vagy csoportok közötti versennyé is alakíthatja, ha megnézi, milyen gyorsan tud minden pilóta eligazodni a szlalomban.
-
Ha többet szeretne megtudni arról, hogyan szervezzen osztálytermi versenyt a szlalom pályával, az alábbi gombra.
3. lépés: Robo-Szlalom
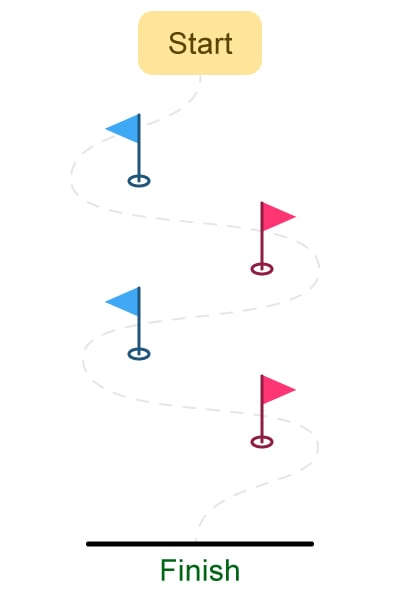
A Controller segítségével mozgassa a Clawbotot minden egyes „zászló” külső oldalán. A robot útjának meg kell akadályoznia, hogy hozzáérjen bármilyen zászlóhoz, és lehetővé kell tennie, hogy áthaladjon a célvonalon.
-
A sofőr futtassa le a projektet, és vezesse a Clawbotot előre és hátra, és mindkét joystick segítségével balra és jobbra forduljon.
-
A rögzítőnek meg kell határoznia, mennyi időbe telik, amíg a Clawbot befejezi a pályát. Dokumentálja az időpontokat a mérnöki jegyzetfüzetbe.
-
Milyen gyorsan tudod elérni a Clawbotot a szlalompályán?
![]() Motiválja a beszélgetést
-
A tevékenység elmélkedése
Motiválja a beszélgetést
-
A tevékenység elmélkedése
K: A Clawbot úgy reagált a vezérlőre, ahogyan azt várta?
A: A válaszok eltérőek lehetnek; ennek a kérdésnek a célja azonban a kognitív gondolkodás elősegítése. A tanulók azzal kezdték, hogy előre jelezték a viselkedést, mielőtt tesztelték őket, dokumentálták eredményeiket és reflektáltak.
K: Mi a legnagyobb kihívás a Clawbot egyenes vonalban történő előre- vagy hátramozgatásában?
A: Bár a válaszok eltérőek lehetnek, a közös válasz az, hogy mindkét Joystick-nek szinkronban kell mozognia egymással annak biztosítására, hogy a Clawbot motorjai ugyanabban az irányban és azonos sebességgel mozogjanak.
K: Hogyan teszi lehetővé a [Forever] hurok használatával, hogy folyamatosan használja a Controllert a Clawbot mozgatására?
A: A [Forever] hurok nélkül a Clawbot csak egyszer hajtaná végre a projekt blokkjai által meghatározott viselkedést. A [Forever] hurok arra utasítja a Clawbotot, hogy folyamatosan frissítse a sebességet, és futtasson a projekt időtartama alatt. Más szavakkal, a [Forever] hurok lehetővé teszi, hogy a Controller segítségével korlátlan ideig mozgassa a Clawbotot, vagy amíg az akkumulátor le nem merül.