
![]() Opettajan työkalupakki
-
[Ikuisesti] Blocks
Opettajan työkalupakki
-
[Ikuisesti] Blocks
Tässä vaiheessa käsitellään [Forever] -lohkon tärkeyttä. Sinun tulee tarkistaa tiedot luokassa. Voit mallintaa käyttäytymistä Clawbotilla ja ohjaimella, tai jos aika sallii, anna oppilaiden suorittaa ohjelma ilman [Forever]-lohkoa.
Vaihe 1: Ohjaimen ohjelmointi
Mitä hyötyä on [Forever] -lohkon käytöstä?
Rakenna tämä projekti alla kuvatulla tavalla ilman [Forever] -lohkoa:
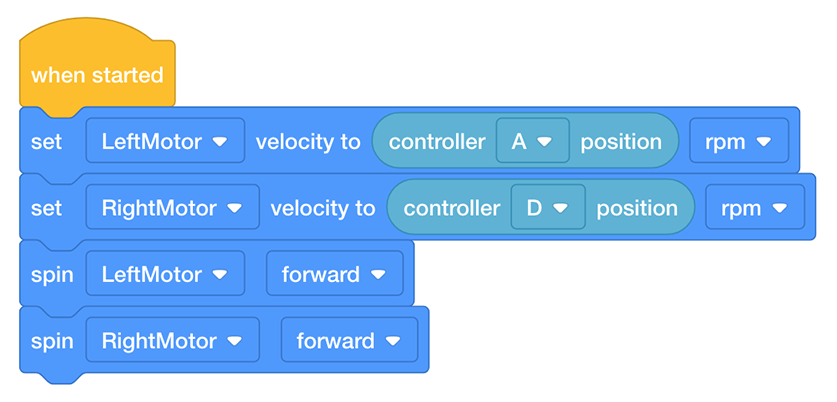
Mitä luulet tapahtuvan, jos tämä ohjelma ajettaisiin? Keskustele ryhmässä. Tallentajan tulee kirjoittaa joukkueen ennustus muistikirjaan.
![]() Opettajan työkalupakki
-
Lohkon ymmärtäminen
Opettajan työkalupakki
-
Lohkon ymmärtäminen
Ilman [Forever]-silmukkaa kunkin moottorin nopeuden arvo asetetaan heti, kun projekti ajetaan, ja tämä arvo pysyy vakiona, kunnes projekti pysäytetään. Toisin sanoen, jos suoritat projektia liikuttamatta kumpaakaan ohjaussauvaa, koska ohjaussauvan oletusasento akselillaan on 0, molempien moottoreiden nopeus pysyy nollassa, vaikka liikutat joystickia.
Samoin oletetaan, että siirrät vasenta ohjaussauvaa ylös niin pitkälle kuin se menee A-akseliaan pitkin ja pidät sitä siellä. Jos suoritat yllä olevan projektin, vasen moottori liikkuu täydellä nopeudella ja pysyy tällä nopeudella, vaikka liikutat ohjaussauvaa alas A-akselia pitkin. Tämä johtuu siitä, että Clawbot saa alustavat ohjeet ohjaimelta heti, kun projekti on suoritettu; Alkuperäistä arvoa ei kuitenkaan voida päivittää ilman silmukkaa.
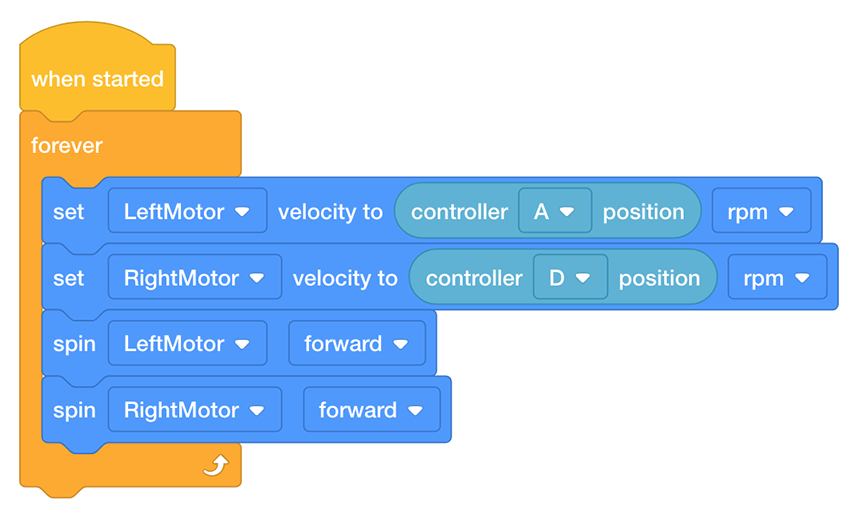
[Forever] -silmukka käskee Clawbotia päivittämään jatkuvasti nopeutta ja ajamaan koko projektin ajan. Toisin sanoen tämän projektin [Forever] -silmukka mahdollistaa jokaisen moottorin nopeuden muuttamisen liikuttamalla joko joystickia A- tai D-akselia pitkin, ja Clawbot reagoi vastaavasti, kunnes pysäytät projektin tai sammutat Clawbot.
Vaihe 2: Navigoi pujotteluradalla

Nyt kun -ohjain on yhdistetty ja projekti on ladattu, olet valmis siirtämään Clawbotiasi ohjaimen avulla!
-
Rakentajan ja ohjelmoijan tulee kerätä opettajalta neljä luokkahuonetta, joita käytät lippuina pujottelussasi.
-
Rakentajan, ohjelmoijan ja tallentimen tulee tehdä yhteistyötä asettaakseen ne paikoilleen, jotta kuljettaja voi navigoida Clawbotilla pujottelukaavion mukaisesti.
-
Kuljettajan tulee ladata clawbotController-projekti. Jos sinulla on kysyttävää projektin lataamisesta, tutustu Lataa ja suorita projekti -opetusohjelma.
![]() Opettajan työkalupakki
-
Haasteen asettaminen
Opettajan työkalupakki
-
Haasteen asettaminen
Pyydä oppilaita suorittamaan tämä pujottelu liikuttamalla Clawbotia ohjaimella jokaisen "lipun" ulkopuolella. Clawbotin polun tulee estää sitä koskemasta mihinkään lippuun ja antaa sen ylittää maaliviiva. Liput voivat olla mitä tahansa luokkahuoneessa olevaa materiaalia/esinettä (pyyhekumi, teippirulla, paperirasia) ja ne voidaan asettaa paikoilleen ennen Clawbotin käyttöä.
-
Jos aika sallii, pyydä oppilaita vaihtamaan rooleja antaaksesi muille mahdollisuus ajaa Clawbotia. Voit jopa muuttaa tämän kilpailuksi ryhmien sisällä tai ryhmien välillä katsomalla, kuinka nopeasti kukin kuljettaja pystyy navigoimaan pujottelussa.
-
Lisätietoja luokkahuonekilpailun järjestämisestä Slalom-kurssilla napsauttamalla alla.
Vaihe 3: Robo-pujottelu
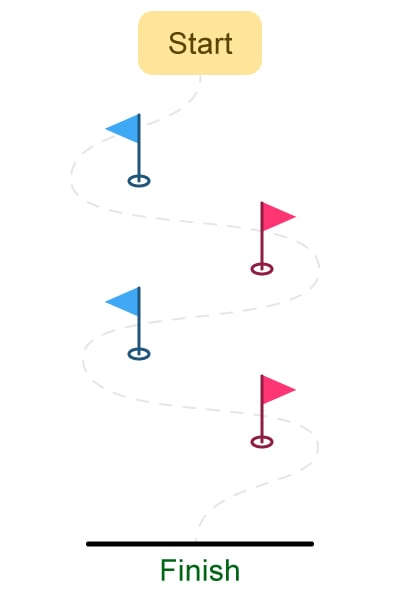
Käytä ohjainta siirtääksesi Clawbotiasi jokaisen "lipun" ulkopuolella. Robotin polun on estettävä sitä koskettamasta lippua ja annettava sen ylittää maaliviiva.
-
Kuljettajan tulee suorittaa projekti ja ajaa Clawbotia eteen- ja taaksepäin sekä kääntyä vasemmalle ja oikealle molemmilla joystickeillä.
-
Tallentimen tulee määrittää, kuinka kauan Clawbotilla kestää kurssin suorittaminen. Kirjaa ajat tekniikan muistikirjaan.
-
Kuinka nopeasti saat Clawbotin pujotteluradan läpi?
![]() Motivoi keskustelua
-
Aktiviteetin pohtiminen
Motivoi keskustelua
-
Aktiviteetin pohtiminen
K: Vastasiko Clawbot ohjaimeen odotetulla tavalla?
A: Vastaukset vaihtelevat; tämän kysymyksen tavoitteena on kuitenkin edistää kognitiivista ajattelua. Oppilaat aloittivat ennustamalla käyttäytymistä ennen niiden testaamista, dokumentoimalla tulokset ja pohtimalla.
K: Mikä on suurin haaste Clawbotin siirtämisessä eteenpäin tai taaksepäin suorassa linjassa?
A: Vaikka vastaukset voivat vaihdella, yhteisen vastauksen tulisi olla, että molempien ohjaussauvojen on liikuttava tahdissa toistensa kanssa varmistaakseen, että Clawbotin moottorit liikkuvat samaan suuntaan ja samalla nopeudella.
K: Miten [Ikuisesti]-silmukan käyttö mahdollistaa ohjaimen jatkuvan käytön Clawbotin liikuttamiseen?
A: Ilman [Forever] -silmukkaa Clawbot suorittaisi projektin lohkojen määrittämän toiminnan vain kerran. [Forever] -silmukka käskee Clawbotia päivittämään jatkuvasti nopeutta ja ajamaan koko projektin ajan. Toisin sanoen [Forever] -silmukan avulla voit käyttää Ohjainta liikuttamaan Clawbotia loputtomiin tai kunnes akku tyhjenee.