
การสำรวจคอนโทรลเลอร์ - ตอนที่ 3
![]() กล่องเครื่องมือสำหรับครู
-
[ตลอดไป] บล็อก
กล่องเครื่องมือสำหรับครู
-
[ตลอดไป] บล็อก
ขั้นตอนนี้จะกล่าวถึงความสำคัญของบล็อก [ตลอดไป] คุณควรตรวจสอบข้อมูลเป็นชั้นเรียน คุณสามารถสร้างแบบจำลองพฤติกรรมด้วย Clawbot และตัวควบคุมของคุณ หรือหากมีเวลา ให้ให้ผู้เรียนรันโปรแกรมโดยไม่ต้องมีบล็อก [ตลอดไป]
ขั้นตอนที่ 1: การเขียนโปรแกรมคอนโทรลเลอร์
ประโยชน์ของการใช้บล็อก [Forever]
มีอะไรบ้าง?
สร้างโปรเจ็กต์นี้ตามที่แสดงด้านล่างโดยไม่ต้องใช้บล็อก [Forever] :
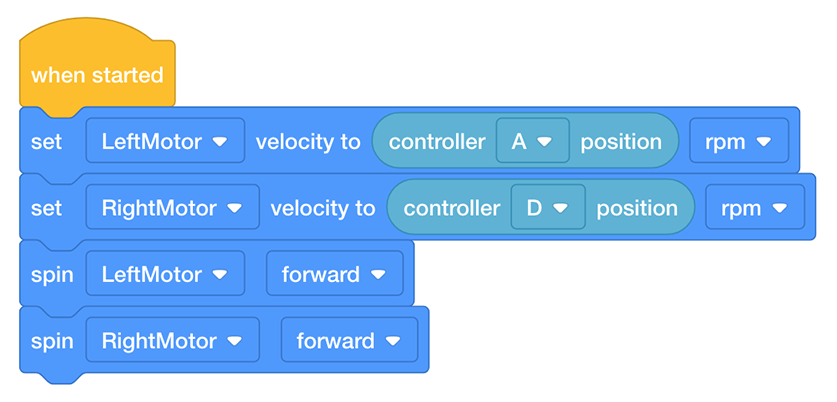
คุณคิดว่าจะเกิดอะไรขึ้นถ้าโปรแกรมนี้ถูกเรียกใช้? หารือกันเป็นกลุ่ม ผู้บันทึกควรเขียนคำทำนายของทีมลงในสมุดบันทึกวิศวกรรม
![]() กล่องเครื่องมือสำหรับครู
-
ทำความเข้าใจบล็อค
กล่องเครื่องมือสำหรับครู
-
ทำความเข้าใจบล็อค
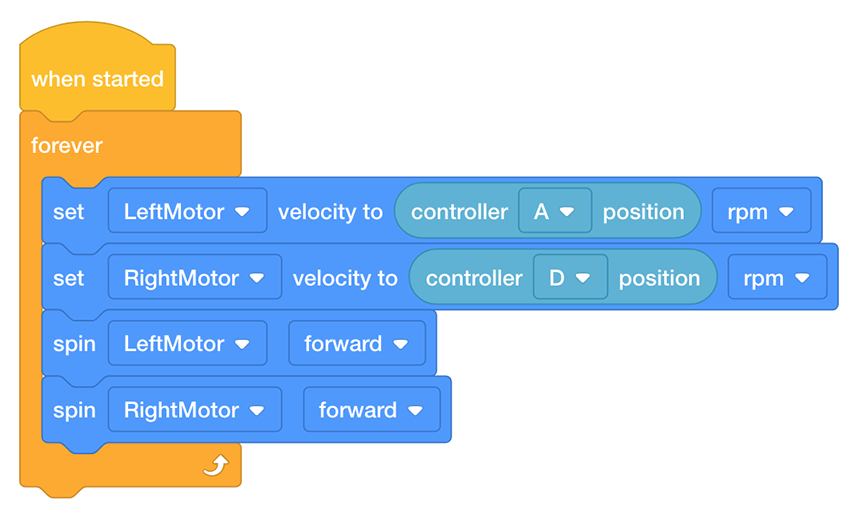
หากไม่มีลูป [ตลอดไป] ค่าความเร็วของมอเตอร์แต่ละตัวจะถูกตั้งค่าทันทีที่โครงการทำงาน
และค่าดังกล่าวจะคงที่จนกว่าโครงการจะหยุด กล่าวอีกนัยหนึ่ง
หากคุณรันโปรเจ็กต์โดยไม่ขยับจอยสติ๊กใดๆ เนื่องจากตำแหน่งเริ่มต้นบนแกนของจอยสติ๊กคือ 0
ความเร็วของมอเตอร์ทั้งสองจะยังคงอยู่ที่ 0
แม้ว่าคุณจะขยับจอยสติ๊กก็ตาม
เช่นเดียวกัน
สมมติว่าคุณขยับจอยสติ๊กซ้ายขึ้นจนสุดตามแกน A และค้างไว้ที่นั่น หากคุณรันโปรเจ็กต์ข้างต้น
มอเตอร์ด้านซ้ายจะเคลื่อนที่ด้วยความเร็วเต็มที่และจะคงความเร็วเท่าเดิมแม้ว่าคุณจะเลื่อนจอยสติ๊กลงมาตามแกน
A ก็ตาม เนื่องจาก Clawbot จะได้รับคำสั่งเริ่มต้นจาก Controller ทันทีที่รันโครงการ
อย่างไรก็ตาม หากไม่มี Loop
ค่าเริ่มต้นนั้นจะไม่สามารถอัปเดตได้
ลูป [ตลอดไป] จะสั่งให้ Clawbot
อัปเดตความเร็วอย่างต่อเนื่องและรันตลอดระยะเวลาของโครงการ กล่าวอีกนัยหนึ่ง
ลูป [ตลอดไป] ในโปรเจ็กต์นี้ช่วยให้คุณสามารถเปลี่ยนความเร็วของมอเตอร์แต่ละตัวได้โดยการเลื่อนจอยสติ๊กไปตามแกน
A หรือ D และ Clawbot จะตอบสนองตามนั้นจนกว่าคุณจะหยุดโปรเจ็กต์หรือปิด Clawbot
ขั้นตอนที่ 2: นำทางเส้นทางสลาลอม

ตอนนี้ตัวควบคุม จับคู่กับ แล้ว และโครงการดาวน์โหลด แล้ว คุณก็พร้อมที่จะเคลื่อนย้าย Clawbot ของคุณโดยใช้ตัวควบคุมแล้ว!
- ผู้สร้างและโปรแกรมเมอร์ควรรวบรวมอุปกรณ์ห้องเรียนทั้งสี่ชิ้นที่คุณจะใช้เป็นธงในการสลาลอมของคุณจากครู
- ผู้สร้าง โปรแกรมเมอร์ และผู้บันทึกจะต้องทำงานร่วมกันเพื่อจัดเตรียมให้พร้อมสำหรับไดรเวอร์เพื่อนำทาง Clawbot ตามแผนผังสลาลอม
- ไดรเวอร์ควรดาวน์โหลดโครงการ clawbotController หากมีคำถามเกี่ยวกับวิธีการดาวน์โหลดโครงการ โปรดดูบทช่วยสอนการดาวน์โหลดและเรียกใช้โครงการ
![]() กล่องเครื่องมือสำหรับครู
-
การตั้งค่าความท้าทาย
กล่องเครื่องมือสำหรับครู
-
การตั้งค่าความท้าทาย
ให้เด็กนักเรียนทำสลาลอมนี้ให้เสร็จโดยใช้ตัวควบคุมเพื่อเคลื่อนย้าย Clawbot ไปตามด้านนอกของ "ธง" แต่ละอัน เส้นทางของ Clawbot จะต้องป้องกันไม่ให้มันสัมผัสธงใดๆ และต้องให้มันข้ามเส้นชัยได้ คุณสามารถนำธงมาใช้กับห้องเรียนหรืออุปกรณ์ใดๆ ก็ได้ที่คุณมีอยู่ในมือ (ยางลบ ม้วนเทป กล่องทิชชู่) และสามารถตั้งให้เข้าที่ก่อนจะใช้งาน Clawbot ได้
- หากมีเวลา ให้ให้เด็กๆ สลับบทบาทกันเพื่อให้คนอื่นมีโอกาสขับ Clawbot คุณสามารถเปลี่ยนสิ่งนี้ให้เป็นการแข่งขันภายในกลุ่มหรือระหว่างกลุ่มได้ โดยดูว่าแต่ละคนสามารถขับสลาลอมได้เร็วแค่ไหน
-
หากต้องการข้อมูลเกี่ยวกับวิธีจัดการแข่งขันในห้องเรียนด้วยหลักสูตรสลาลอม คลิกด้านล่าง
Google Doc / .docx / .pdf
ขั้นตอนที่ 3: โรโบสลาลอม
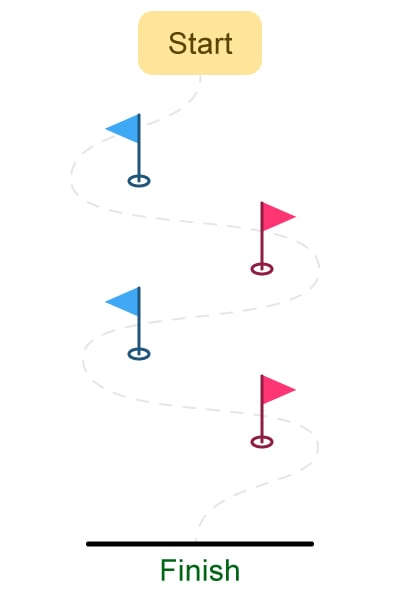
ใช้ตัวควบคุมเพื่อเคลื่อนย้าย Clawbot ของคุณไปตามด้านนอกของ "ธง" แต่ละอัน เส้นทางของหุ่นยนต์จะต้องไม่สัมผัสกับธงใด ๆ และต้องสามารถผ่านเส้นชัยได้
- คนขับจะต้องรันโครงการและขับ Clawbot ไปข้างหน้าและถอยหลัง และเลี้ยวซ้ายและขวาโดยใช้จอยสติ๊กทั้งสองอัน
- ผู้บันทึกควรจับเวลาว่า Clawbot ใช้เวลานานเท่าใดจึงจะจบหลักสูตร บันทึกเวลาไว้ในสมุดบันทึกวิศวกรรม
- คุณสามารถผ่านหลักสูตร Slalom ด้วย Clawbot ได้เร็วแค่ไหน?
![]() กระตุ้นให้เกิดการสนทนา
-
การสะท้อนถึงกิจกรรม
กระตุ้นให้เกิดการสนทนา
-
การสะท้อนถึงกิจกรรม
ถาม: Clawbot ตอบสนองต่อตัวควบคุมตามที่คุณคาดหวังหรือไม่
ตอบ: คำตอบอาจแตกต่างกันไป อย่างไรก็ตาม
เป้าหมายของคำถามนี้คือเพื่อส่งเสริมการคิดเชิงองค์ความรู้
นักเรียนเริ่มต้นด้วยการทำนายพฤติกรรมก่อนที่จะทดสอบ บันทึกผลลัพธ์ และสะท้อนกลับ
ถาม: ความท้าทายที่ยิ่งใหญ่ที่สุดในการเคลื่อน Clawbot
ไปข้างหน้าหรือถอยหลังเป็นเส้นตรงคืออะไร
ตอบ: แม้ว่าคำตอบอาจแตกต่างกันไป
แต่คำตอบทั่วไปควรเป็นว่าจอยสติ๊กทั้งสองอันจะต้องเคลื่อนที่พร้อมกันเพื่อให้แน่ใจว่ามอเตอร์ของ
Clawbot เคลื่อนที่ไปในทิศทางเดียวกันและด้วยความเร็วเท่ากัน
ถาม: การใช้ลูป [ตลอดไป]
ช่วยให้คุณใช้คอนโทรลเลอร์เพื่อเคลื่อนย้าย Clawbot ได้อย่างต่อเนื่องอย่างไร
ตอบ: หากไม่มีลูป [ตลอดไป] Clawbot
จะดำเนินการตามพฤติกรรมที่กำหนดโดยบล็อกในโปรเจ็กต์เพียงครั้งเดียวเท่านั้น
ลูป [ตลอดไป] จะสั่งให้ Clawbot
อัปเดตความเร็วอย่างต่อเนื่องและทำงานตลอดระยะเวลาของโครงการ กล่าวอีกนัยหนึ่ง
ลูป [ตลอดไป] ช่วยให้คุณสามารถใช้ตัวควบคุมเพื่อเคลื่อนย้าย Clawbot
ได้อย่างไม่มีกำหนดเวลาหรือจนกว่าแบตเตอรี่จะหมด