
Esplorazione del controller - Parte 3
![]() Blocchi della cassetta degli attrezzi dell'insegnante
-
[Per sempre]
Blocchi della cassetta degli attrezzi dell'insegnante
-
[Per sempre]
In questo passaggio viene illustrata l'importanza del blocco [Per sempre]. Dovreste rivedere le informazioni come classe. Puoi modellare il comportamento con il tuo Clawbot e il tuo Controller oppure, se il tempo lo consente, chiedere agli studenti di eseguire il programma senza il blocco [Forever].
Fase 1: Programmazione del controller
Quali sono i vantaggi dell'utilizzo di un blocco [Forever]?
Costruisci questo
progetto come mostrato di seguito senza il blocco [Forever] :
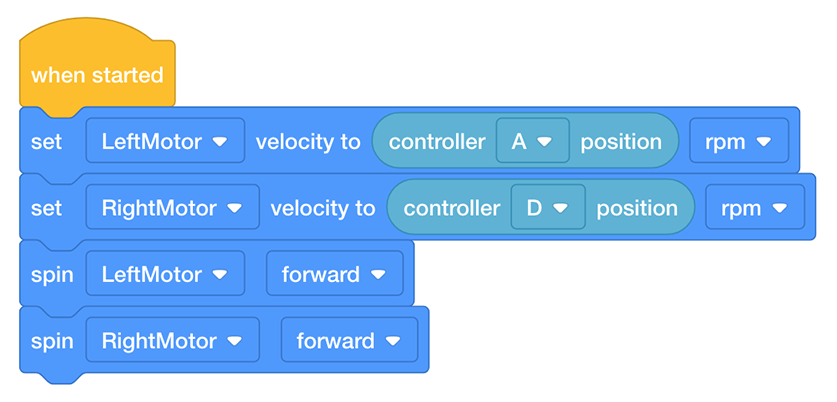
Cosa pensi che accadrebbe se questo programma venisse eseguito? Discutine in gruppo. Il verbalizzatore dovrebbe annotare la previsione della squadra sul quaderno di ingegneria.
![]() Toolbox per l'insegnante
-
Comprendere il blocco
Toolbox per l'insegnante
-
Comprendere il blocco
Senza il ciclo [Forever], il valore della velocità per ciascun motore viene
impostato non appena il progetto viene eseguito e tale valore rimane costante finché il
progetto non viene arrestato. In altre parole, se esegui il progetto senza muovere
nessuno dei due Joystick, poiché la posizione predefinita del Joystick sul suo asse è 0,
la velocità di entrambi i motori rimarrà a 0, anche se muovi il Joystick.
Allo
stesso modo, supponiamo di muovere il Joystick sinistro verso l'alto il più possibile
lungo il suo asse A e di tenerlo in questa posizione. Se esegui il progetto sopra, il
motore sinistro si muoverà alla massima velocità e manterrà tale velocità anche se
sposti il joystick verso il basso lungo l'asse A. Ciò avviene perché Clawbot riceve la
sua istruzione iniziale dal Controller non appena il progetto viene eseguito; tuttavia,
senza un Loop, quel valore iniziale non può essere aggiornato.
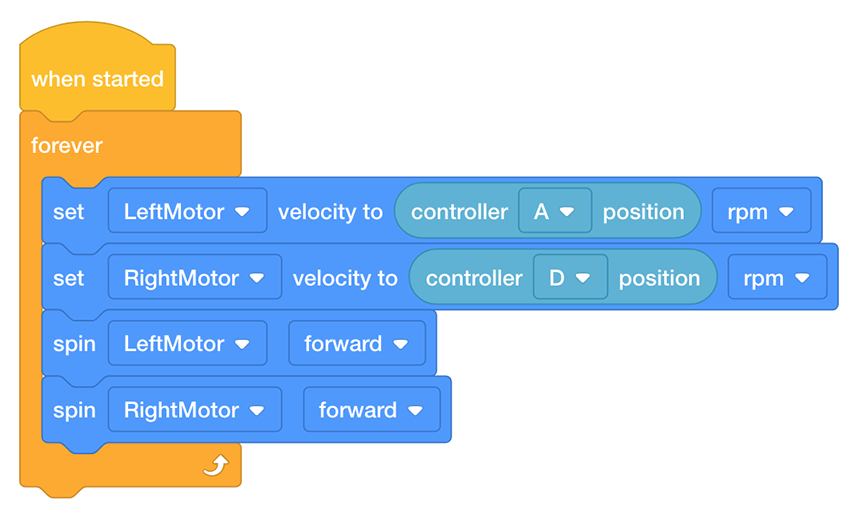
Il
loop [Forever] indica a Clawbot di aggiornare costantemente la velocità e di
funzionare per tutta la durata del progetto. In altre parole, il
ciclo [Forever] , in questo progetto, consente di modificare la velocità di
ciascun motore spostando il joystick lungo l'asse A o D e il Clawbot risponderà di
conseguenza finché non si interrompe il progetto o non si spegne il Clawbot.
Fase 2: navigare in un percorso di slalom

Ora che il controller è associato e il progetto è scaricato, sei pronto a muovere il tuo Clawbot utilizzando il controller!
- Il Costruttore e il Programmatore devono raccogliere dall'insegnante i quattro oggetti che userete come bandiere nello slalom.
- Il costruttore, il programmatore e il registratore devono collaborare per impostarli in modo che il conducente possa guidare il Clawbot, secondo lo schema dello slalom.
- Il driver dovrebbe scaricare il progetto clawbotController. In caso di domande su come scaricare un progetto, consultare il tutorial Scaricare ed eseguire un progetto.
![]() Toolbox per l'insegnante
-
Impostazione della sfida
Toolbox per l'insegnante
-
Impostazione della sfida
Chiedi agli studenti di completare questo slalom utilizzando il controller per muovere il Clawbot lungo la parte esterna di ogni "bandiera". Il percorso del Clawbot deve impedirgli di toccare nessuna bandiera e consentirgli di tagliare il traguardo. Le bandierine possono essere costituite da qualsiasi materiale/oggetto scolastico che hai a portata di mano (una gomma, un rotolo di nastro adesivo, una scatola di fazzoletti) e possono essere posizionate prima di azionare il Clawbot.
- Se il tempo lo consente, fate invertire i ruoli tra gli studenti per dare ad altri l'opportunità di guidare il Clawbot. Si potrebbe anche trasformare il tutto in una competizione all'interno dei gruppi o tra gruppi, osservando la velocità con cui ogni pilota riesce a completare lo slalom.
-
Per informazioni su come organizzare una gara in classe con il percorso Slalom, qui sotto.
Fase 3: Robo-Slalom
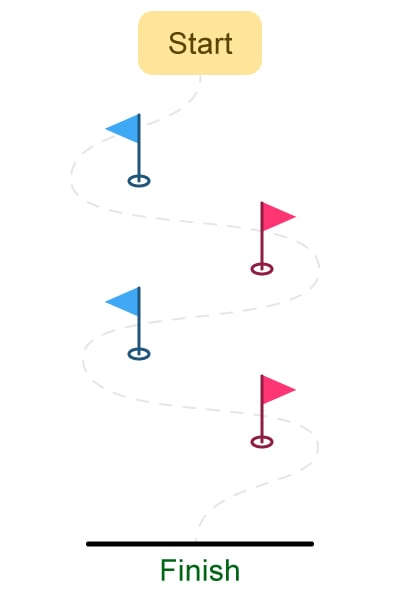
Utilizza il controller per muovere il tuo Clawbot lungo la parte esterna di ogni "bandiera". Il percorso del robot deve impedirgli di toccare nessuna bandierina e consentirgli di tagliare il traguardo.
- Il conducente deve eseguire il progetto e guidare il Clawbot in avanti e indietro, nonché girare a sinistra e a destra utilizzando entrambi i joystick.
- Il registratore dovrebbe cronometrare il tempo impiegato dal Clawbot per completare il percorso. Documentare i tempi nel quaderno di progettazione.
- Quanto velocemente riesci a far attraversare a Clawbot il percorso Slalom?
![]() Motivare la discussione
-
Riflettere sull'attività
Motivare la discussione
-
Riflettere sull'attività
D: Il Clawbot ha risposto al Controller come ti aspettavi?
R: Le risposte possono variare; tuttavia, l'obiettivo di questa
domanda è promuovere il pensiero cognitivo. Gli studenti hanno iniziato prevedendo i
comportamenti prima di testarli, documentando i risultati e riflettendo.
D: Qual è la sfida più grande nel muovere il Clawbot in avanti o
indietro in linea retta?
R: Sebbene le risposte possano variare, una risposta comune
dovrebbe essere che entrambi i joystick devono muoversi in sincronia tra loro per
garantire che i motori del Clawbot si muovano nella stessa direzione e alla stessa
velocità.
D: In che modo l'utilizzo del ciclo [Forever] consente di
utilizzare continuamente il Controller per spostare il Clawbot?
R: Senza il ciclo [Forever] , il Clawbot eseguirebbe i
comportamenti determinati dai blocchi nel progetto solo una volta. Il
ciclo [Forever] indica al Clawbot di aggiornare costantemente la velocità e di
funzionare per tutta la durata del progetto. In altre parole, il ciclo [Per
sempre] ti consente di utilizzare il controller per muovere il Clawbot
indefinitamente, o finché la batteria non si esaurisce.