
모두 합치기
이 단원의 이전 단원에서는 다음 내용을 배웠습니다.
- 로봇 팔이 제조 환경에서 어떻게 사용되는지.
- VEXcode EXP를 시작하는 방법.
- 6축 로봇 팔에 데카르트 좌표계를 사용하는 방법.
- Teach Pendant를 사용하여 타일 위치의 (x, y, z) 좌표를 수집하는 방법.
이 단원에서는 6축 팔을 사용하여 이러한 모든 기술을 하나로 모아 하나의 추가 활동을 완료하게 됩니다.
모두 함께 모으기 활동
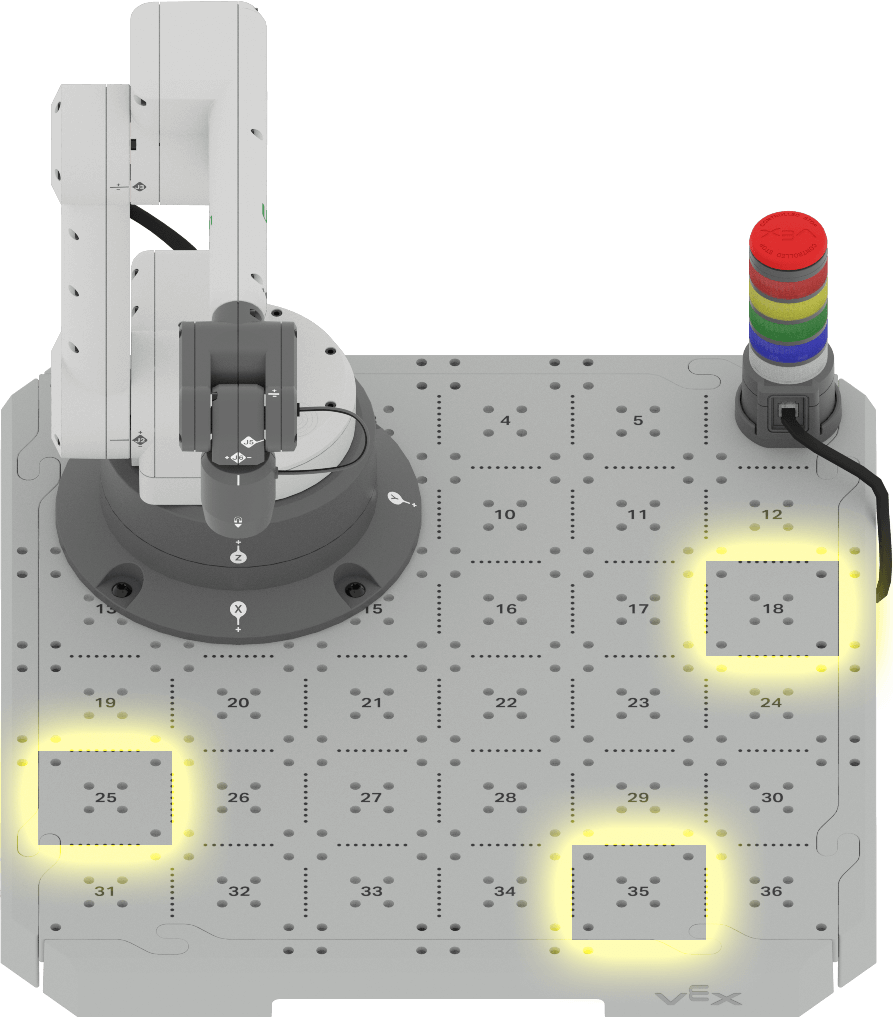
- 다음 타일 위치의 (x, y, z) 좌표를 추정해 보세요. 6축 암이 각 타일 위치에 닿아 있고 z좌표가 0mm라고 가정합니다.
- 타일 위치 18
- 타일 위치 25
- 타일 위치 35
- 이러한 좌표 추정치를 엔지니어링 노트북에 기록하세요. 각 추정치를 어떻게 결정했는지 설명하세요.
- 6축 암을 수동으로 이동하고 1단계의 동일한 타일 위치의 (x, y, z) 좌표를 엔지니어링 노트북에 기록합니다. 6축 암을 각 위치로 옮기기 전에 6축 암이 연결되었고 수동 이동이 활성화되어 있는지 확인하세요.
- 수집한 좌표를 엔지니어링 노트북에 있는 추정치와 비교해보세요. 귀하의 추정은 얼마나 정확했습니까?
마무리 반성
이제 Teach Pendant를 사용하여 여러 타일 위치의 (x, y, z) 좌표를 수집했으므로 이 단원에서 배우고 수행한 내용을 되돌아볼 시간입니다.
엔지니어링 노트에 다음 개념 각각에 대해 초보자, 견습생, 전문가로 평가해 보세요. 각 개념에 대해 해당 평가를 내린 이유를 간략하게 설명해 주세요.
- 산업용 로봇이 무엇인지, 그리고 일상생활에서 어디에서 찾아볼 수 있는지 알아봅니다.
- VEX코드 EXP가 있는 장치에 6축 암을 연결합니다.
- 6축 암의 TCP에서 원점까지의 거리를 기준으로 타일 위치의 (x, y, z) 좌표를 추정합니다.
- 수동 이동을 사용하여 (x, y, z) 좌표를 수집합니다.
이 표를 사용하여 자신이 어느 범주에 속하는지 판단해 보세요.
| 전문가 | 저는 그 개념을 완전히 이해했고 다른 사람에게도 가르칠 수 있을 것 같습니다. |
| 도제 | 나는 활동을 완료하기에 충분히 개념을 이해했다고 느낀다. |
| 초심자 | 저는 개념을 이해하지 못하고 활동을 완료하는 방법도 모릅니다. |
그런 다음, 이 단원을 위해 선생님과 함께 만든 학습 목표를 되돌아보세요. 당신은 배우려고 했던 것을 다 배웠나요? 왜 그럴까? 아니면 왜 그렇지 않을까? 가장 성공적이었던 것은 무엇입니까? 왜? 앞으로 어떻게 진전을 이룰 수 있다고 생각하시나요?
그룹의 각 구성원은 엔지니어링 노트에 자기성찰 내용을 작성해야 합니다. 그룹에 있는 모든 사람이 자기성찰을 마치면 선생님께 체크인하고 토론을 위한 준비가 되었다고 알려주세요.
대화 브리핑
이제 단원의 활동을 마쳤으니, 단원 전체에서 배운 내용과 진행 상황을 돌아볼 차례입니다. 이 대화에서 여러분과 선생님은 단원 시작 시에 공동으로 만든 학습 목표에 대한 진행 상황과 아래의 토론 대화 평가 기준에 따른 자체 평가, 그리고 그룹과 협력하여 작업한 경험에 대해 논의합니다. 토론 중에 평가를 뒷받침하고 질문에 답하기 위해 엔지니어링 노트북에 있는 메모와 성찰 내용에서 얻은 증거를 활용하게 됩니다.
엔지니어링 노트북에 있는 반성과 메모를 활용하여 여기에 링크된 Debrief Conversation Rubric에 따라 자신을 평가하세요(Google Doc / .docx / .pdf). 각 주제에 대해 전문가, 견습생, 초보자로 평가해 보세요.
자기평가에서 무엇을 기대해야 하는지에 대해 자세히 알고 싶으면 강사에게 문의하세요.

모든 단원으로 돌아가려면 < 으로 돌아가기를 선택하세요.