
Lekce 2: Kódovací dopravníky
Dříve jste se dozvěděli o dopravnících a rozdělovačích a o tom, jak umožňují efektivní přepravu materiálů v průmyslovém prostředí. Také jste se dozvěděli, jak fungují dopravníky na CTE Workcell. Nyní jste připraveni začít s kódováním dopravníků pro přepravu disků. V této lekci se naučíte:
- Jak konfigurovat jednotlivé motory dopravníku ve VEXcode.
- Jak vytvořit projekt VEXcode pro přesun disků z jednoho dopravníku na druhý pomocí časových pohybů.
Do konce této lekce vytvoříte projekt pro přepravu disku od vstupního dopravníku, přes transportní dopravník až na výstupní dopravník.
Příprava na kódování dopravníků
Než budete moci kódovat dopravníky na CTE Workcell, je třeba splnit několik důležitých úkolů. Budete muset nakonfigurovat každý jednotlivý motor dopravníku ve VEXcode. Budete také muset upravit sadu bloků, které iniciují řízené zastavení, abyste se ujistili, že jsou zahrnuty všechny motory dopravníku.
Konfigurace jednotlivých motorů ve VEXcode
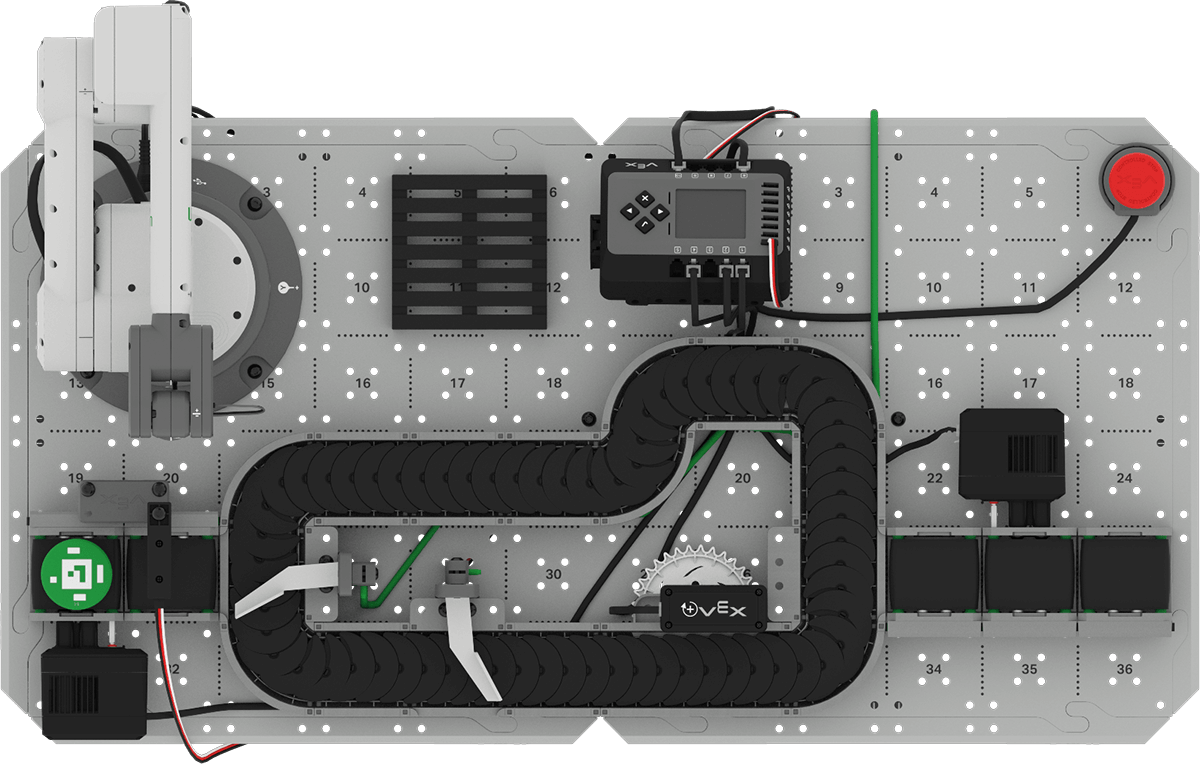
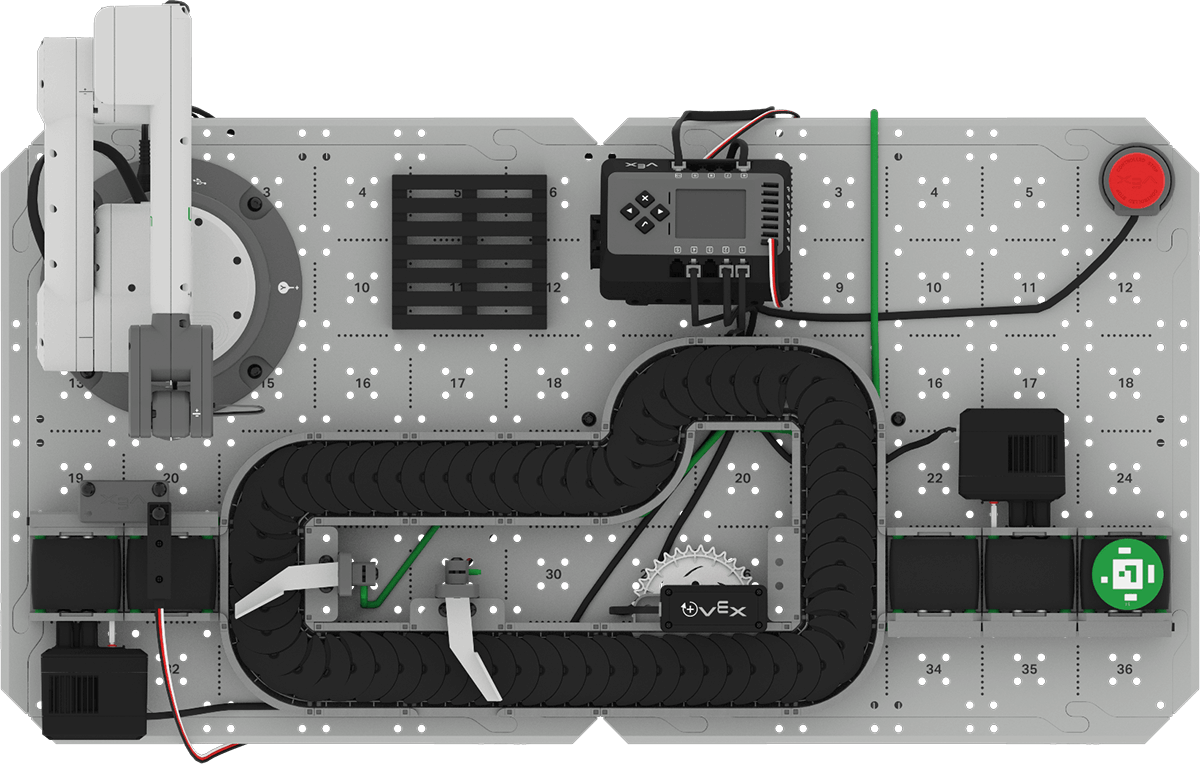
Každý dopravník na CTE Workcell je řízen samostatným motorem. Z tohoto důvodu budete muset před zahájením projektu přidat každý motor do konfigurace ve VEXcode. Dále se budete muset ujistit, že každý motor je správně pojmenován a že je nastaven tak, aby se otáčel ve směru potřebném pro úspěšnou přepravu materiálů.
Konfigurace motoru vstupního dopravníku
Otevřete projekt šablony Brain CTE 6-Axis Arm Base.
Poznámka:Připomenutí, jak otevřít příklady ve VEXcode EXP, naleznete v předchozí lekci.

Přejmenujte projekt na Unit 4 Lesson 2a uložte jej do svého zařízení.

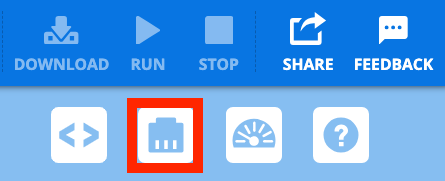
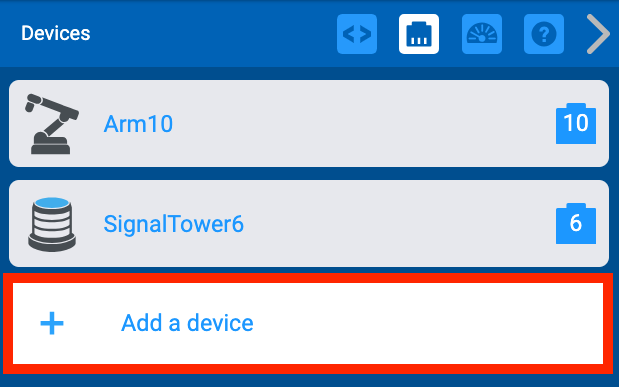
Otevřete okno Zařízení.
Vyberte Přidat zařízení.
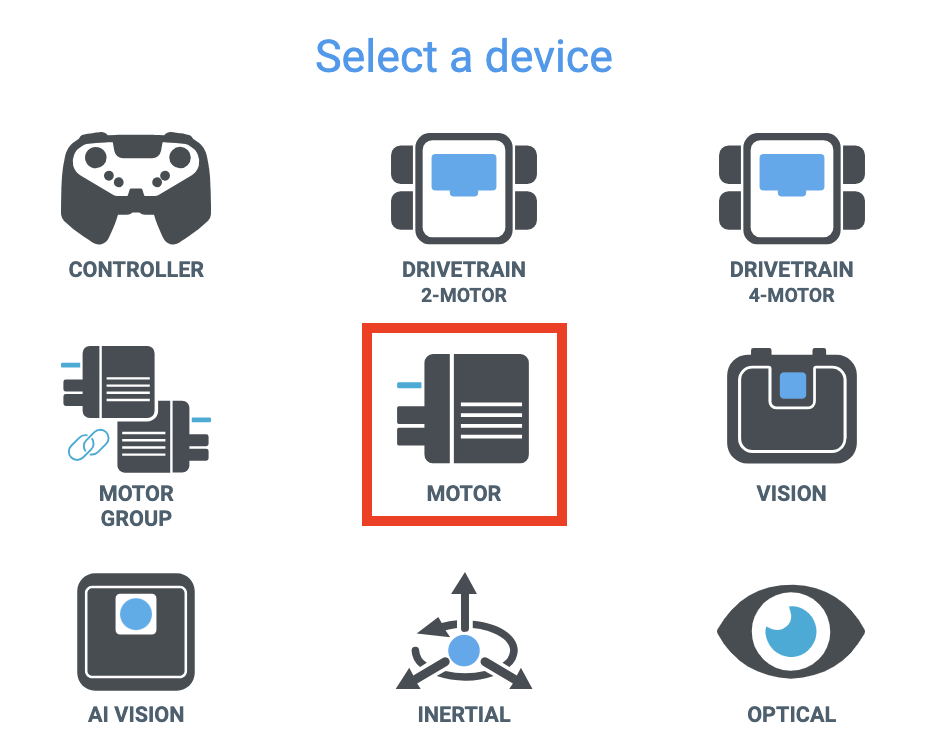
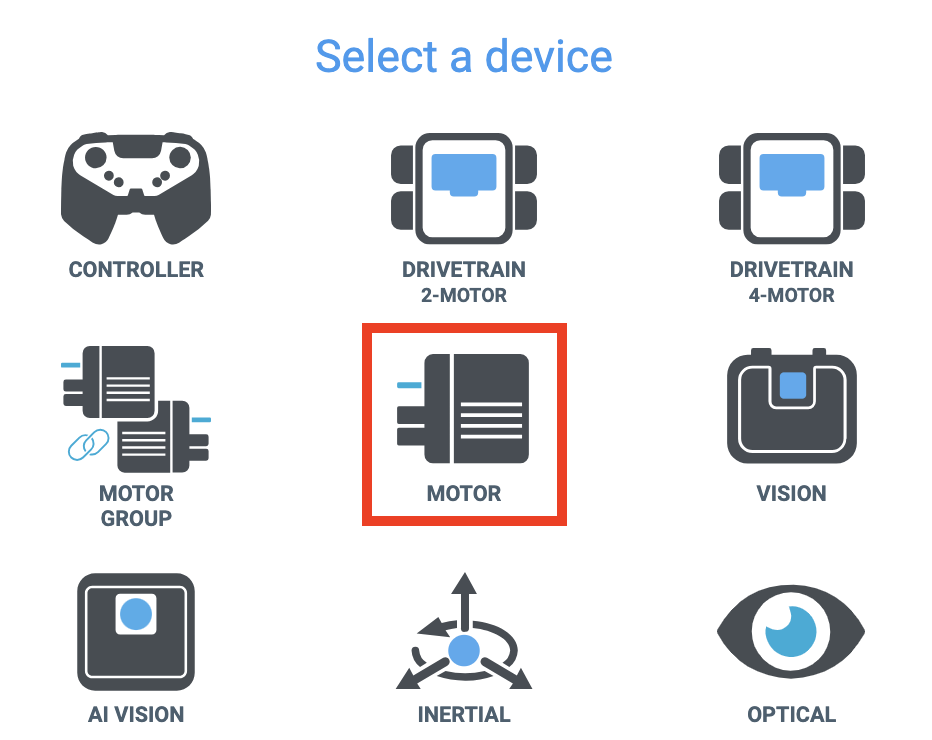
Vyberte Motor ze seznamu zařízení.
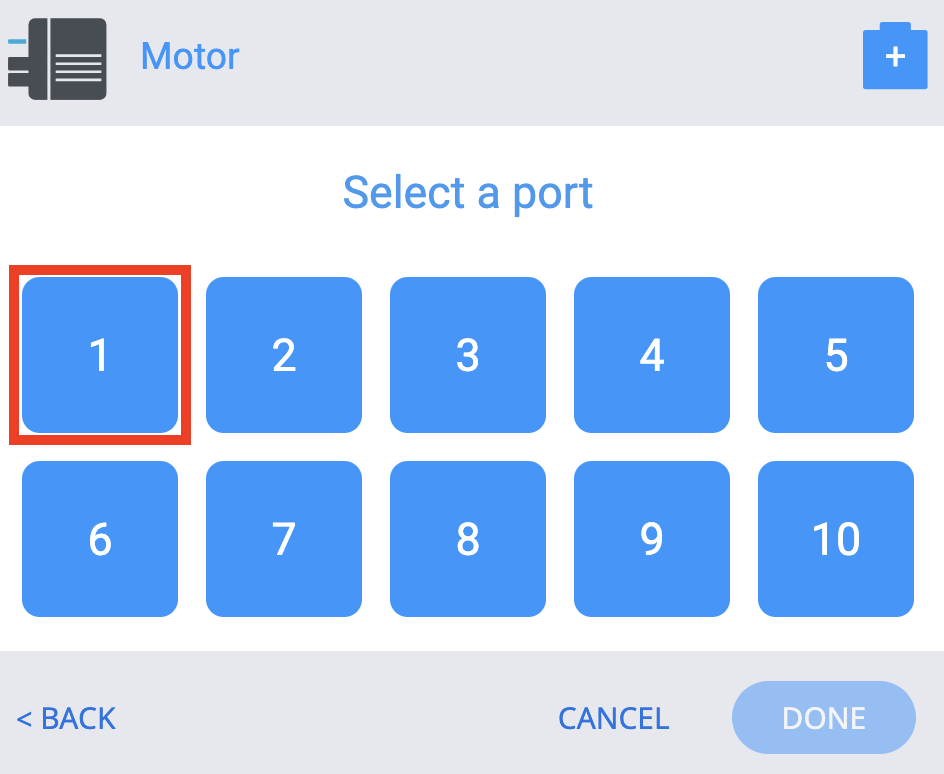
Vyberte port 1 na modulu Brain, který odpovídá portu, ke kterému je připojen motor vstupního dopravníku.
Poznámka:Ujistěte se, že je motor vstupního dopravníku zapojen do portu 1 na řídicí jednotce.
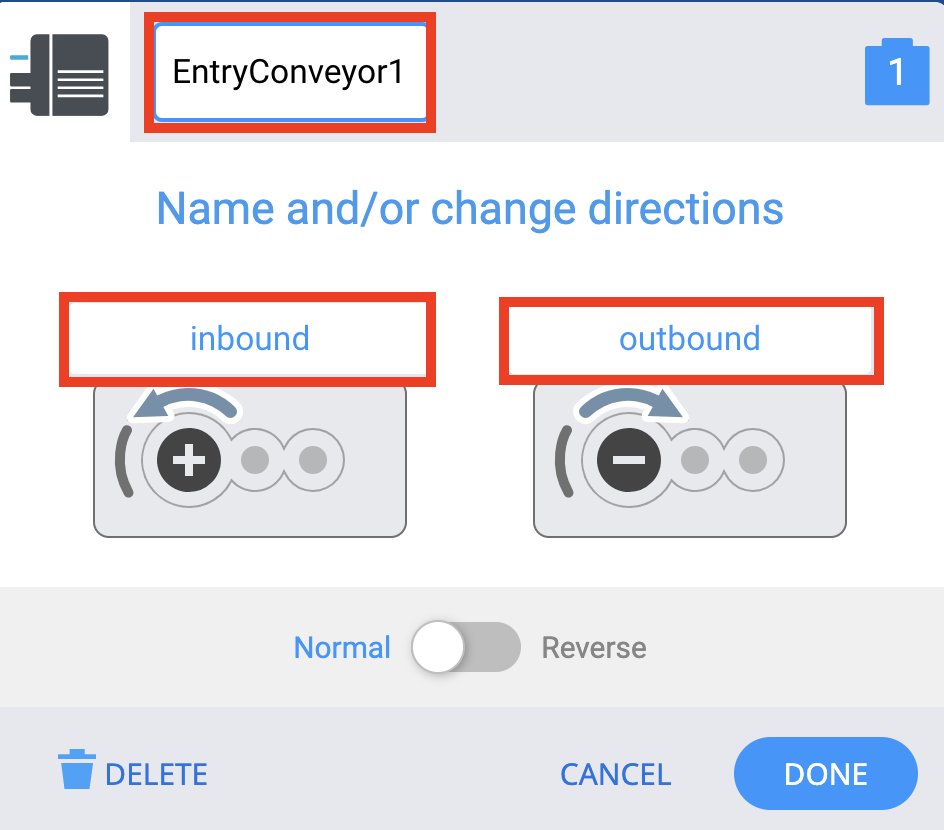
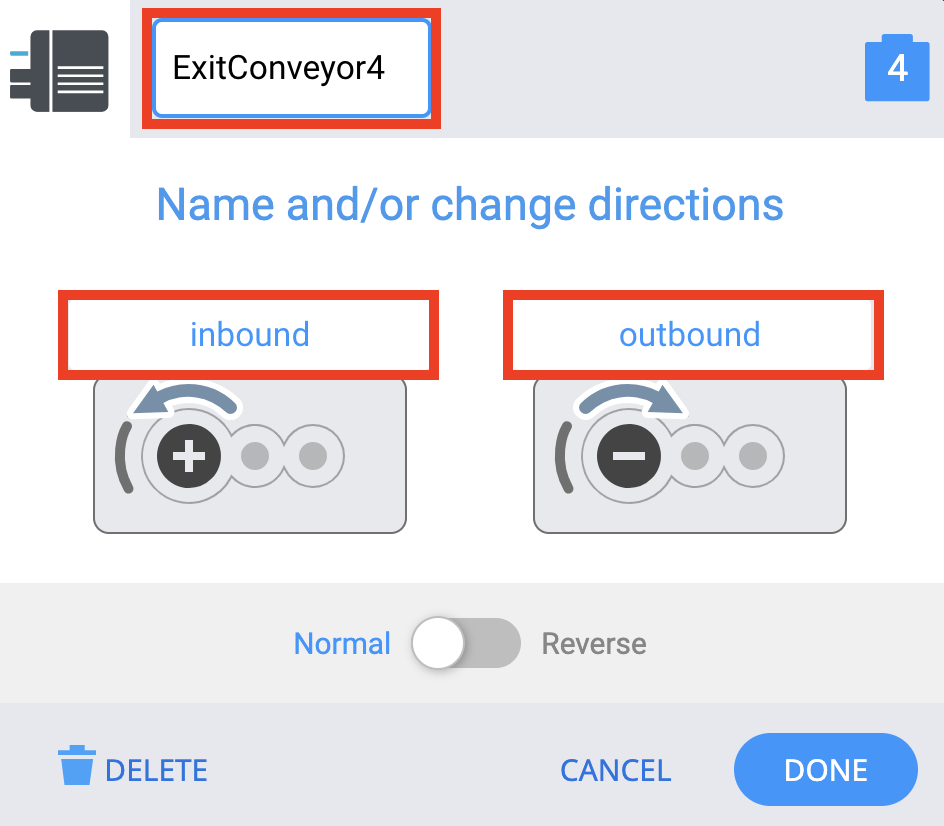
Upravte popisky tak, aby odpovídaly tomuto obrázku.
- Motor by měl být přejmenován tak, aby byl jasně identifikovatelný jako motor vstupního dopravníku. Číslo v názvu označuje port, do kterého je připojen.
- Směry motoru by měly být také přejmenovány na příchozí a odchozí, protože výchozí označení vpřed a vzaddostatečně nepopisují pohyb dopravníků.
Příchozí znamená, že vstupní dopravník se otáčí směrem k transportnímu dopravníku. Odchozíznamená, že vstupní dopravník se odtáčí směrem od transportního dopravníku.
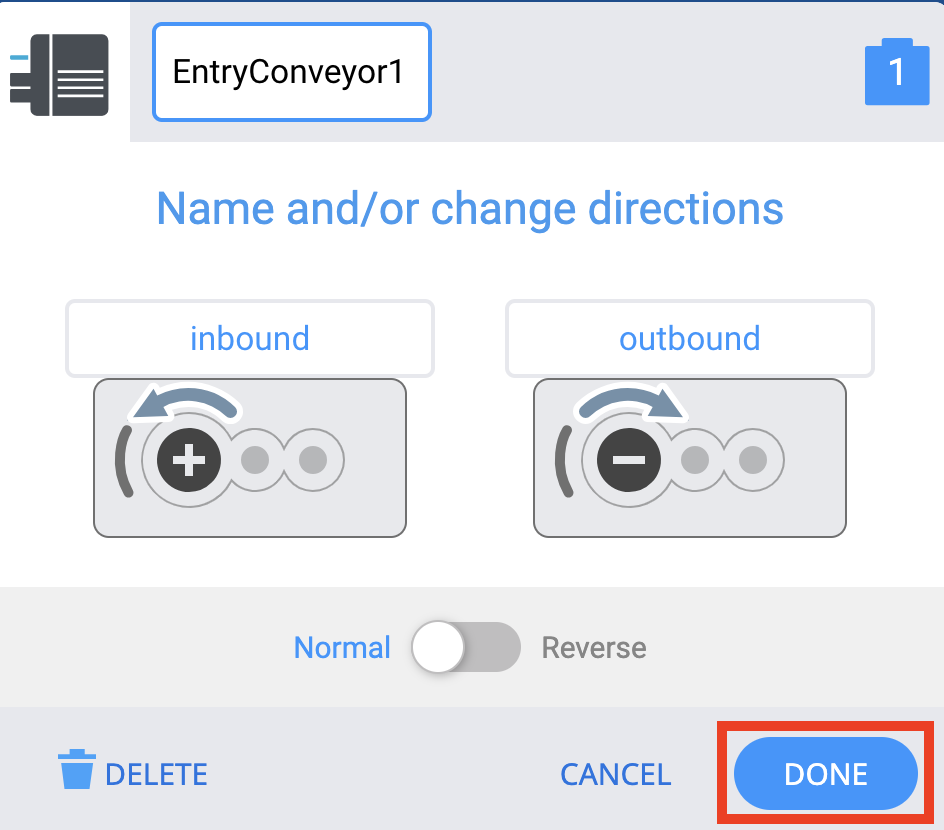
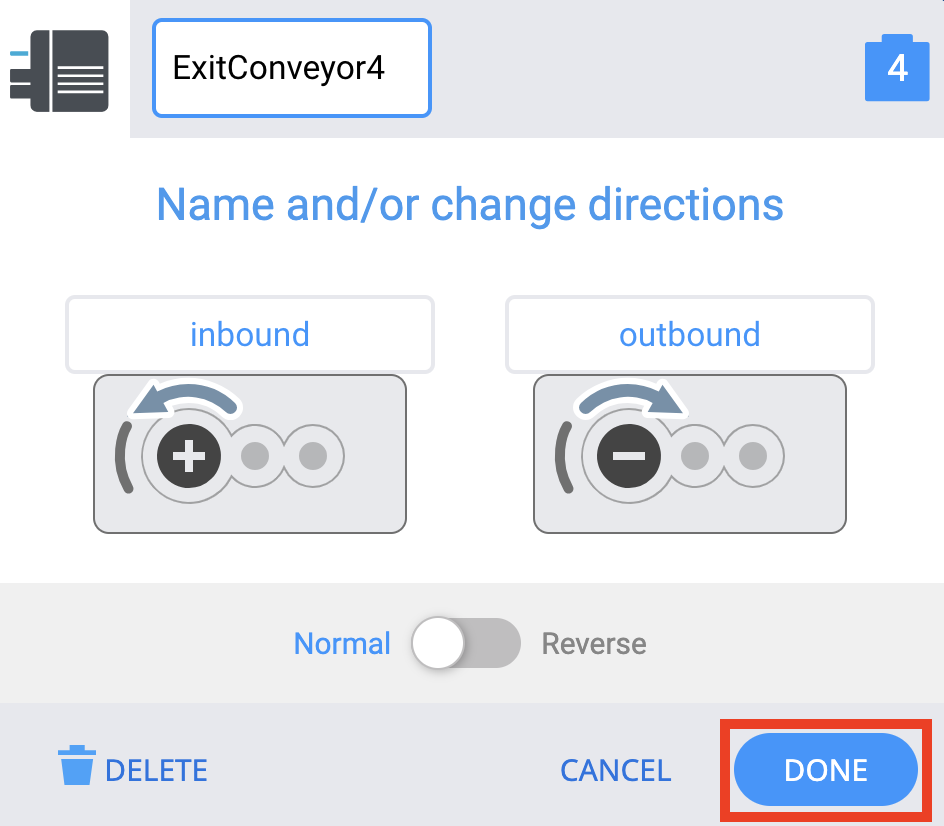
Vybrat Hotovo
Konfigurace motoru výstupního dopravníku
Motor výstupního dopravníku lze konfigurovat stejným způsobem jako motor vstupního dopravníku.
V okně Zařízení vyberte ze seznamu zařízení Motor.

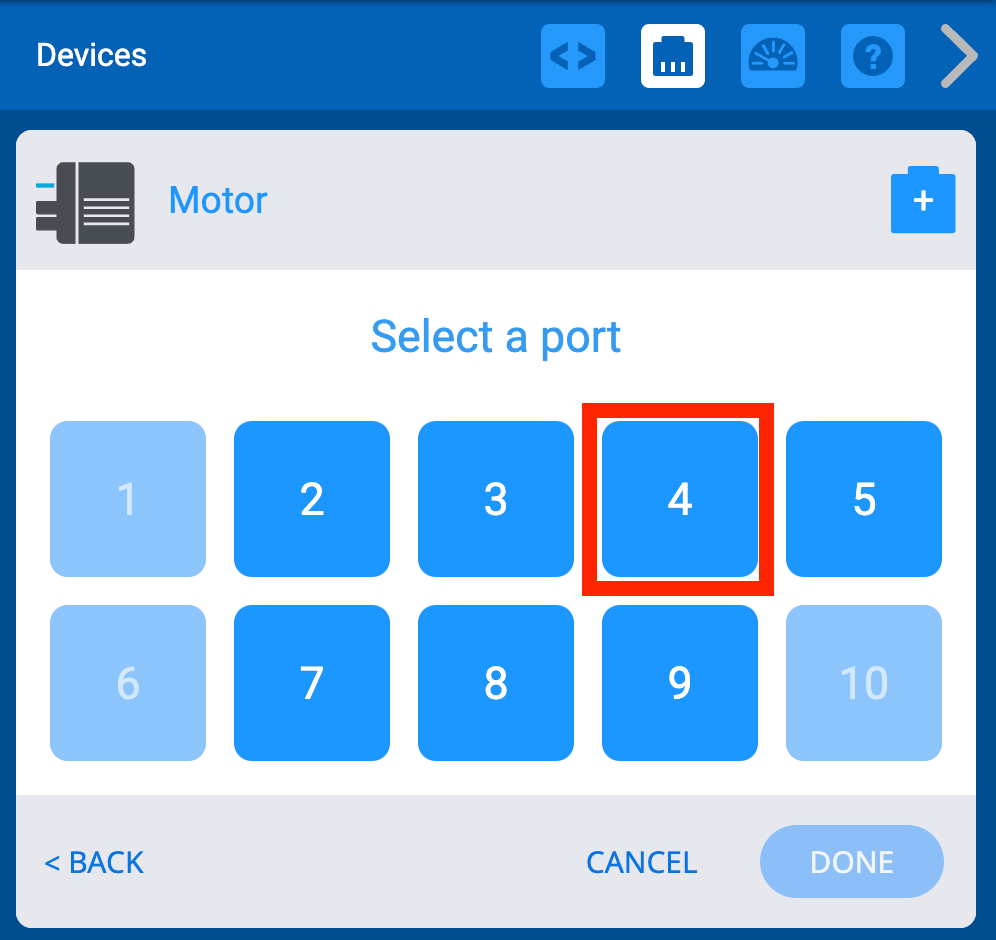
Vyberte port 4 tak, aby odpovídal portu, ke kterému je připojen motor výstupního dopravníku.
Poznámka:Ujistěte se, že je motor výstupního dopravníku zapojen do portu 4 na jednotce Brain.
Upravte popisky tak, aby odpovídaly těm na obrázku.
- Motor by měl být přejmenován tak, aby byl jasně identifikovatelný jako motor výstupního dopravníku. Číslo v názvu označuje port, do kterého je připojen.
- Směry motoru by měly být také přejmenovány napříchozíaodchozí,, jak jste to udělali dříve u vstupního dopravníku.
Příchozíznamená, že výstupní dopravník se otáčísměrem kpřepravnímu dopravníku. Odchozíznamená, že výstupní dopravník se odtáčísměrem od transportního dopravníku.
Vyberte Hotovo.
Konfigurace motoru dopravního dopravníku
Nakonec budete muset nakonfigurovat motor dopravního dopravníku. Kromě toho budete muset obrátit směr otáčení motoru, aby se dopravník pohyboval požadovaným směrem.
V okně Zařízení vyberte ze seznamu Zařízení Motor.
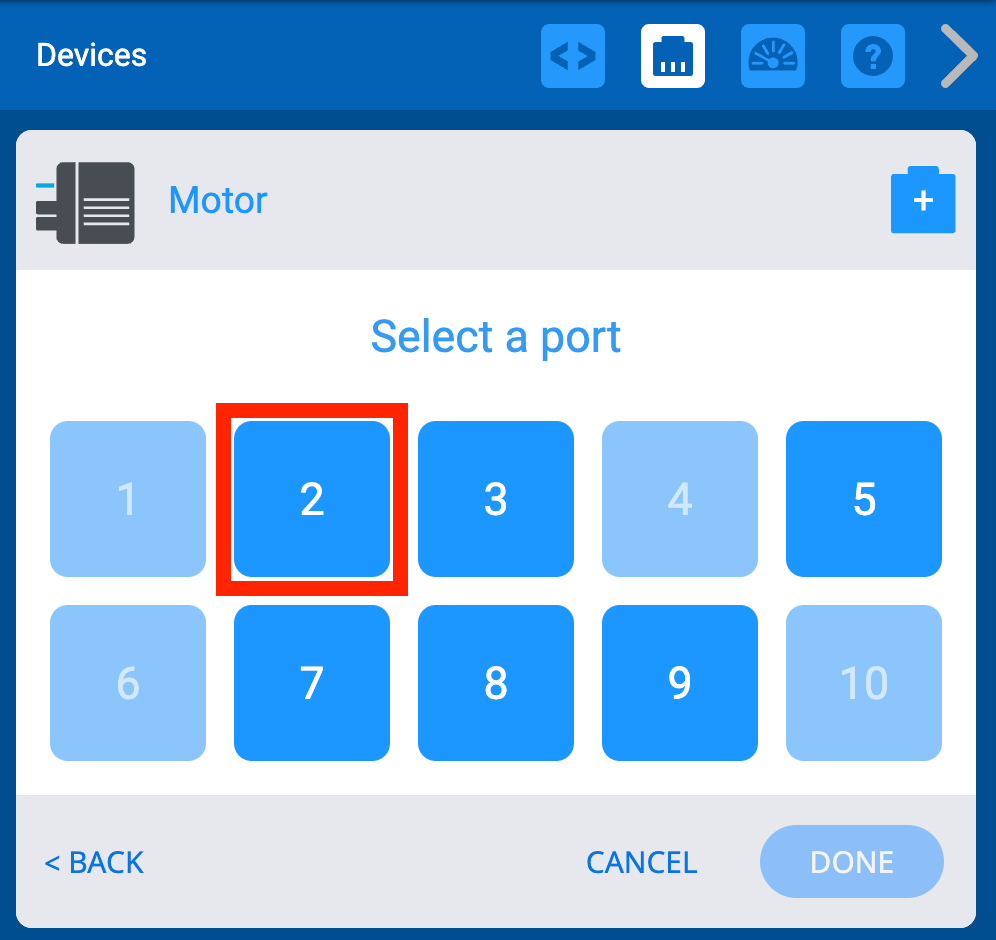
Vyberte port 2 tak, aby odpovídal portu, ke kterému je připojen motor dopravníku.
Poznámka:Ujistěte se, že je motor dopravníku zapojen do portu 2 na jednotce Brain.
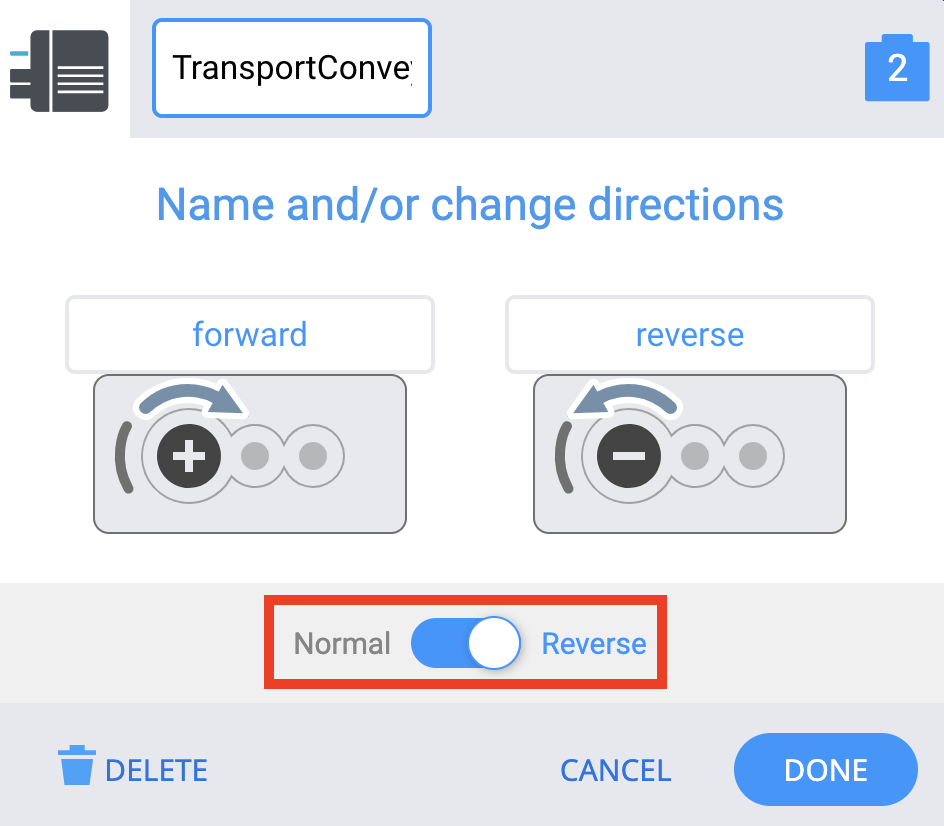
Přejmenujte motor na TransportConveyor2.1
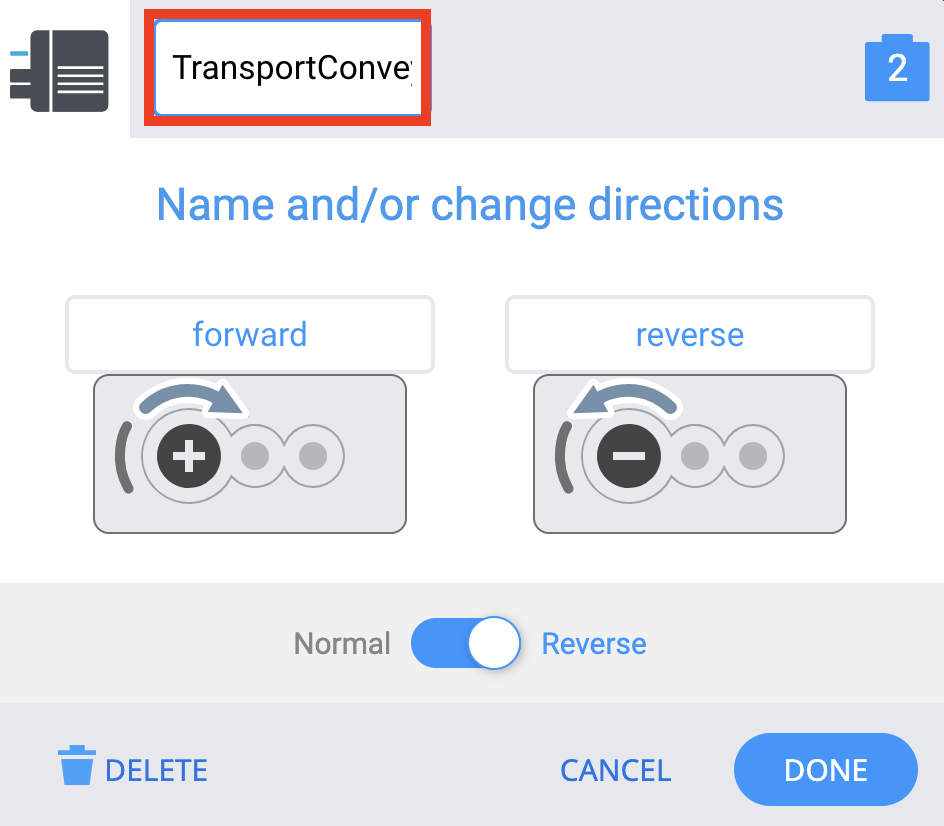
Aby dopravník mohl přesouvat materiály správným směrem, je nutné stisknout přepínač pro změnu směru otáčení motoru z Normální na Zpětný chod.
Směr motoru dopravního dopravníku
Při konfiguraci motoru dopravníku jste museli obrátit jeho směr otáčení. Je to proto, že motor bude ve výchozím nastavení otáčet dopravníkem ve směru hodinových ručiček. Výchozí směr otáčení motoru můžete určit na základě jeho označení.
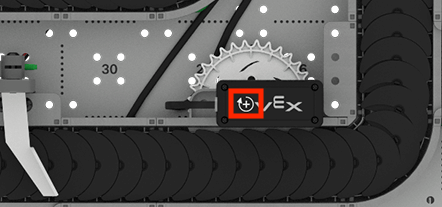
Na horní straně každého motoru je ikona označující, který směr je kladný. V případě dopravníku šipka ukazuje ve směru hodinových ručiček. To znamená, že ve výchozím nastavení se jakýkoli disk umístěný na transportním dopravníku bude otáčet od vstupního dopravníku k prvnímu odkláněči. Reverzací motoru v konfiguraci zajistíte, že směr vpředodpovídá tomu, co je považováno za správnou dráhu podél dopravníku.
Úprava řízeného zastavení
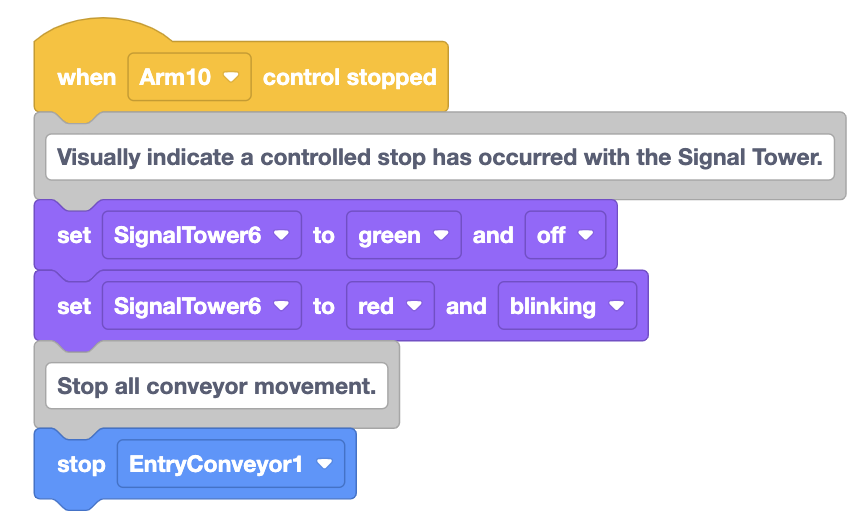
Nyní, když jste nakonfigurovali všechny motory dopravníku, je třeba aktualizovat řízené zastavení. Když je spuštěno řízené zastavení, měly by se všechny motory zastavit, abyste si byli jisti, že se s pracovní základnou CTE Workcell lze bezpečně pohybovat. Do blokuWhen controlled stoppřidáte bloky, které zastaví tyto motory dopravníku.
Vytvořte komentář který popisuje chování dopravníku potřebné během řízeného zastavení.

Přidejte blokComment do existující hromádky bloků.
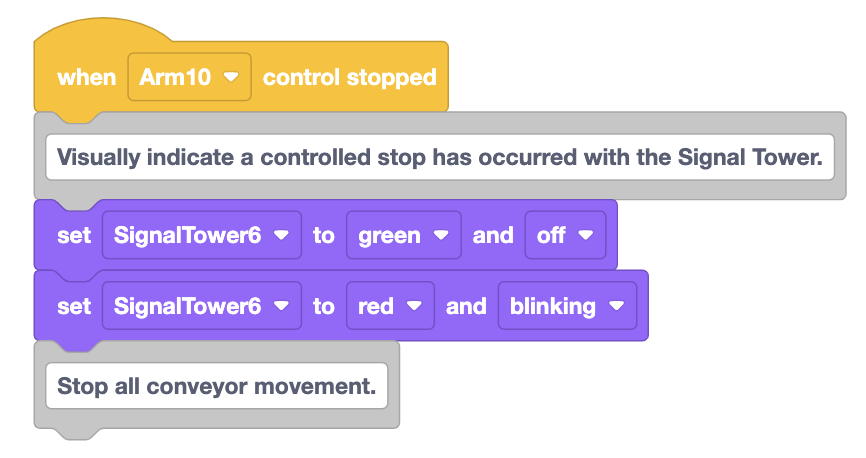
Vytáhněte blok Stop motor pro zastavení vstupního dopravníku a připojte jej ke stohu bloků.
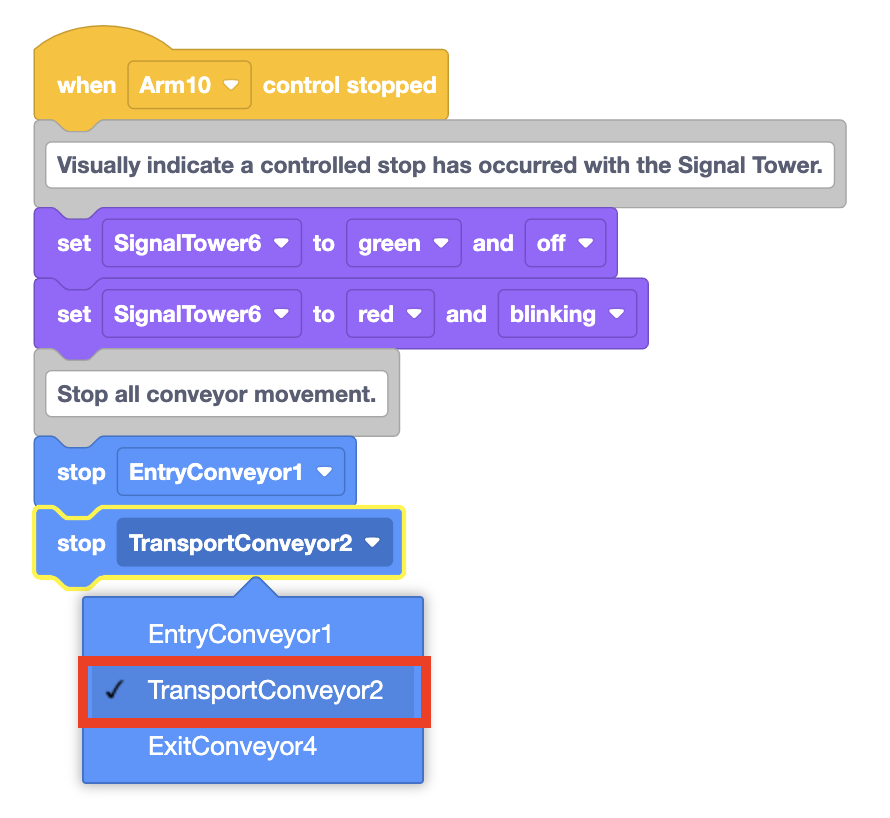
Vytáhněte další blok Zastav motor a připevněte ho ke spodní části stohu bloků.
Kliknutím na šipku otevřete rozbalovací nabídku a výběrem možnosti „TransportConveyor2“ nastavte parametr pro řízené zastavení dopravního dopravníku.
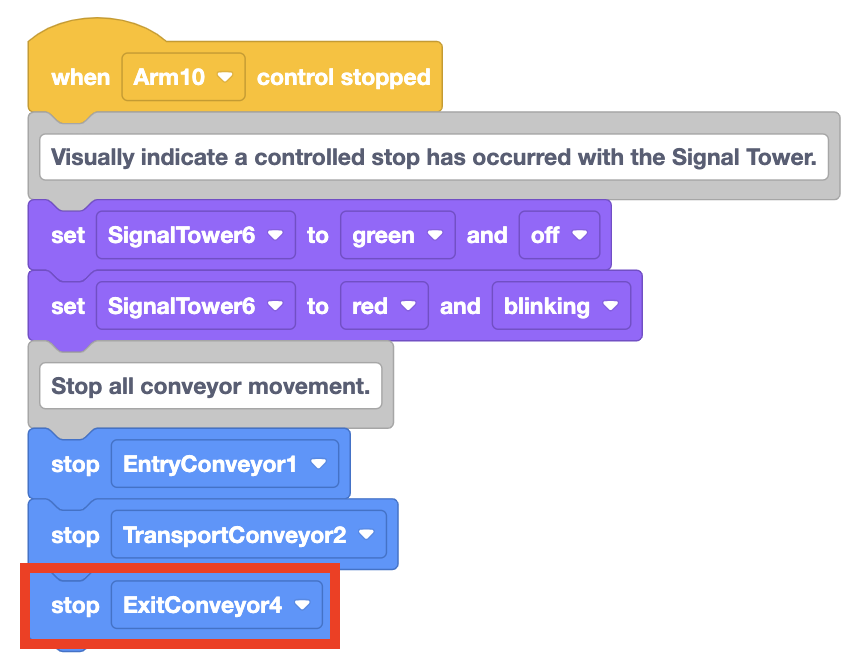
Přidejte do zásobníku třetí blok Stop motor. Změňte parametr na 'ExitConveyor4'.
Vytvoření projektu pro přepravu disku pomocí dopravníků
Nyní, když jste nakonfigurovali motory dopravníku a upravili řízené zastavení, můžete začít s tvorbou projektu pro přepravu disku pomocí dopravníků. Začnete vytvářet projekt pro cestu disku od vstupního dopravníku, podél transportního dopravníku k výstupnímu dopravníku. Aby toho bylo možné dosáhnout, musí být pohyb disku po dopravnících pečlivě koordinován. Jedním ze způsobů, jak dosáhnout této koordinace, je vytvořit projekt s využitím pohybů založených na čase, jak je znázorněno ve videu níže.
Pohyby založené na čase
Použitím kombinace bloků Wait, Spina Stop motor můžete vytvořit projekt, kde každý dopravník spouští a zastavuje ve správný čas, aby přenesl disk z jednoho dopravníku na druhý. Tento způsob kódování dopravníků se označuje jako používání pohybů založených na čase.
Budování projektu
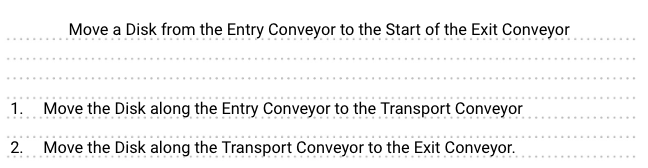
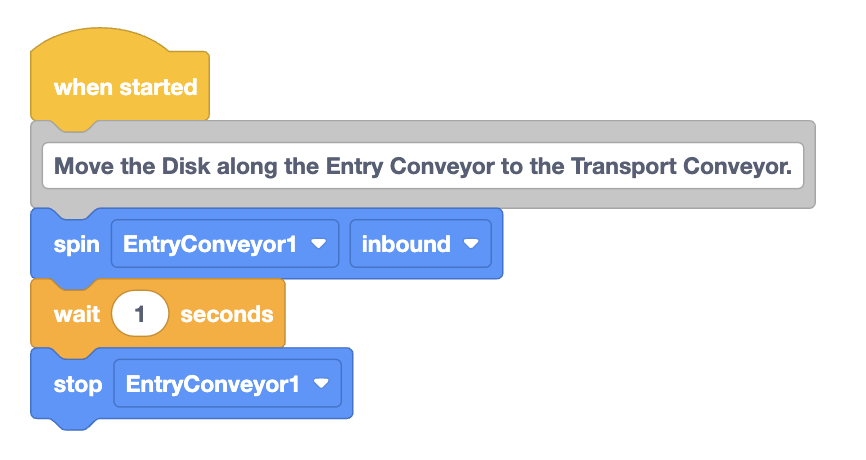
Zaznamenejte si do svého technického sešitu kroky plánování potřebné k přesunu disku, jako jsou ty znázorněné na obrázku.
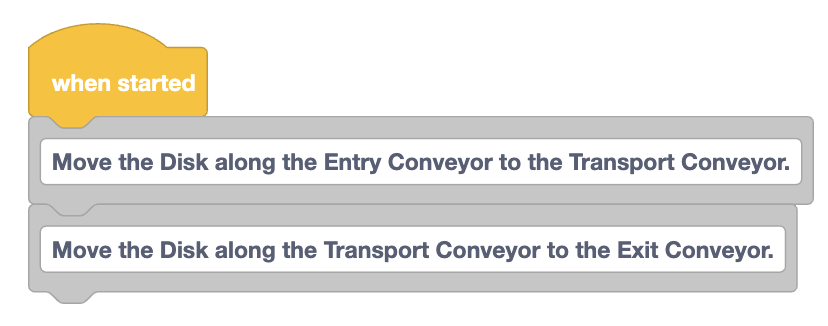
Pro každý krok plánu vytvořte bloky Komentář a připojte je k bloku Kdy začalo .
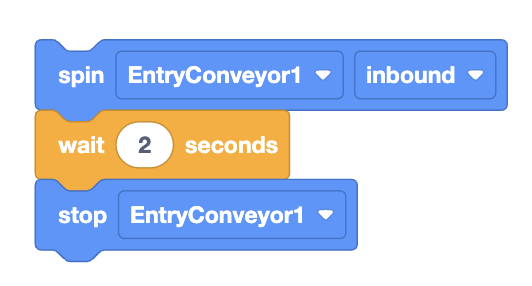
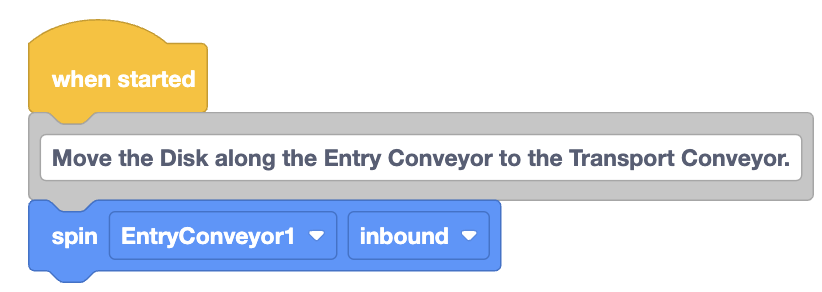
Připojte blok Spinpod první Komentář.
Disk se spouští na vstupním dopravníku a ve směru transportního dopravníku, takže parametry mohou zůstat nastaveny na „VstupníDopravník1“ a „příchozí“.
BlokSpinbude motor točit donekonečna, dokud nedostane pokyn k jeho zastavení.
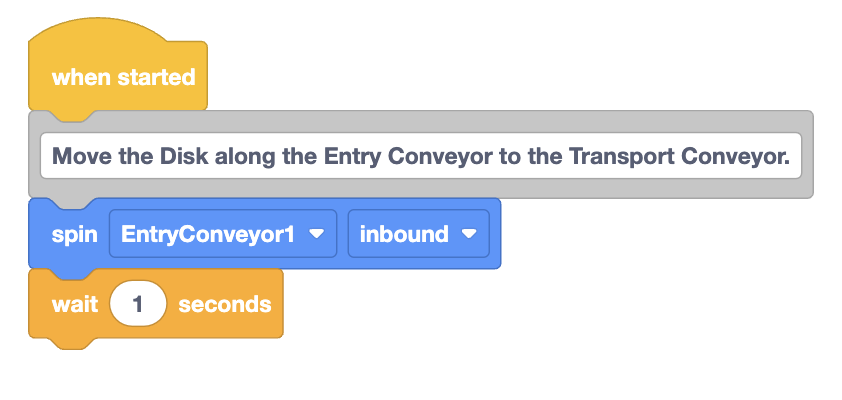
Dále připojte blok Wait.
Připevněte blok Stop motorna spodní část stohu bloků. Ujistěte se, že je parametr nastaven na hodnotu 'EntryConveyor1'.
Vytvořte předpověď, co si myslíte, že se stane po spuštění projektu. Zaznamenejte si to do svého technického sešitu.
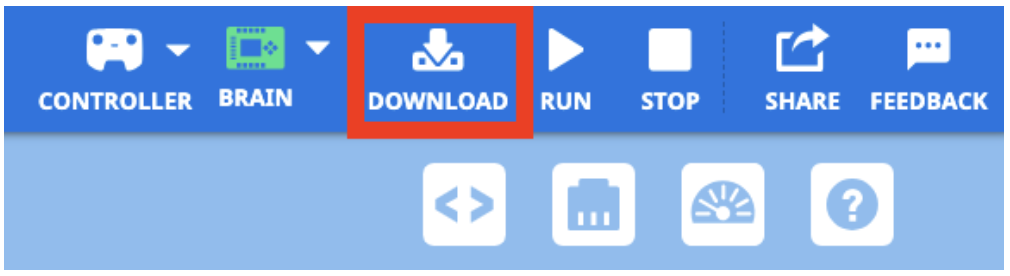
Ujistěte se, že je Brain připojen k VEXcode a stáhněte si projekt do Brainu.
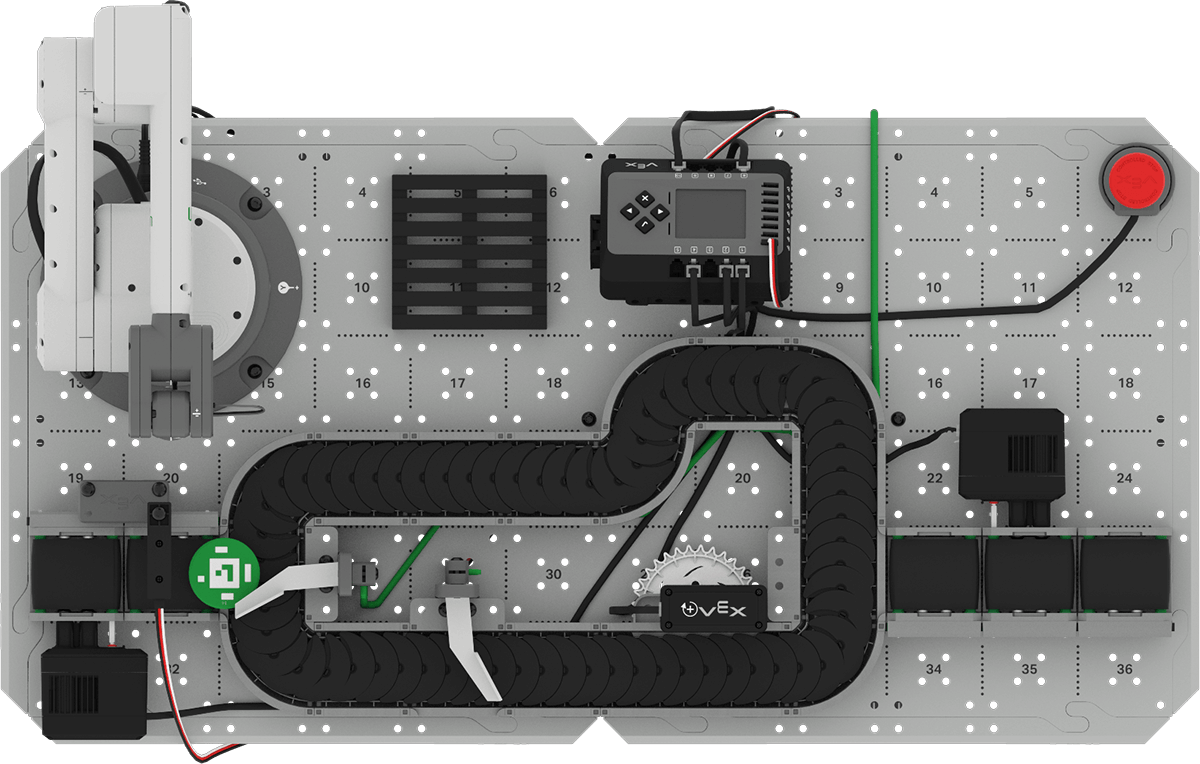
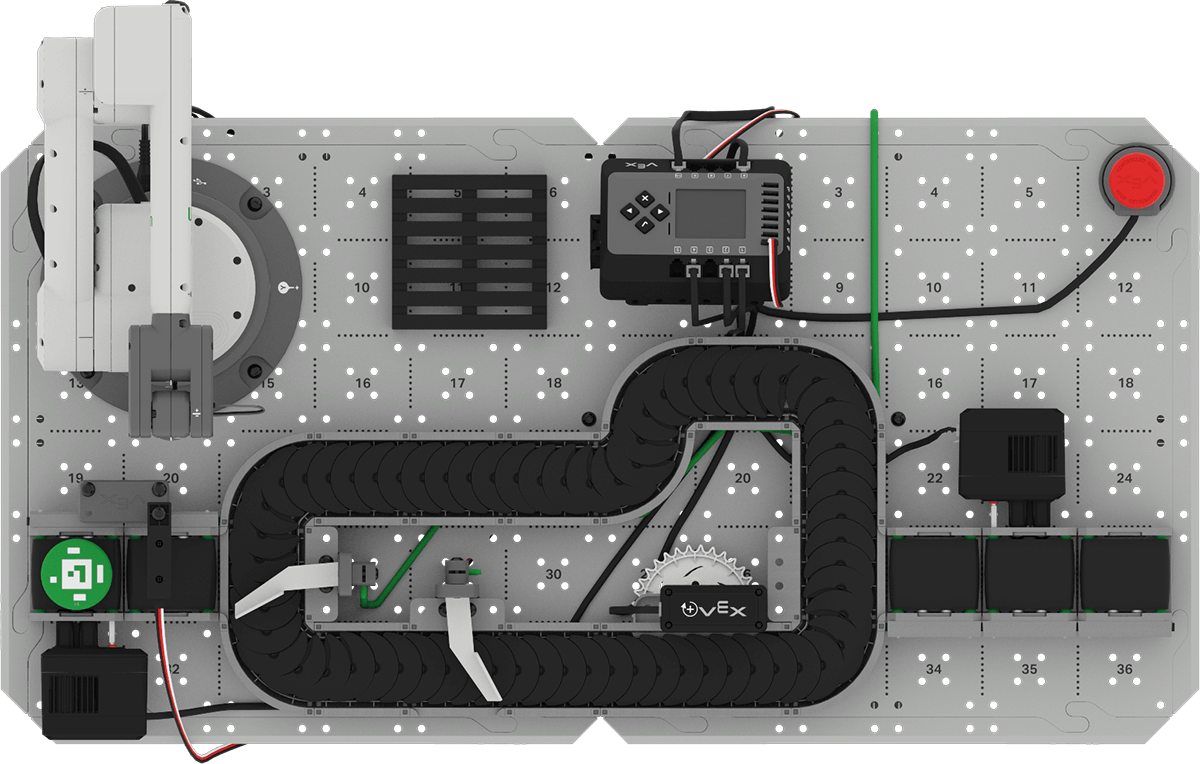
Ujistěte se, že na začátku vstupního dopravníku je umístěn zelený disk, jak je zde znázorněno. Stiskněte tlačítko Check na Brainu pro spuštění projektu a jeho otestování.
Pozorujte chování dopravníku. Dopraví disk na konec vstupního dopravníku? Proč ano nebo proč ne?
Jakmile se dopravník zastaví, stiskněte tlačítko X na Brainu pro zastavení projektu. Svá pozorování si zaznamenejte do technického sešitu.

Načasování dopravníku
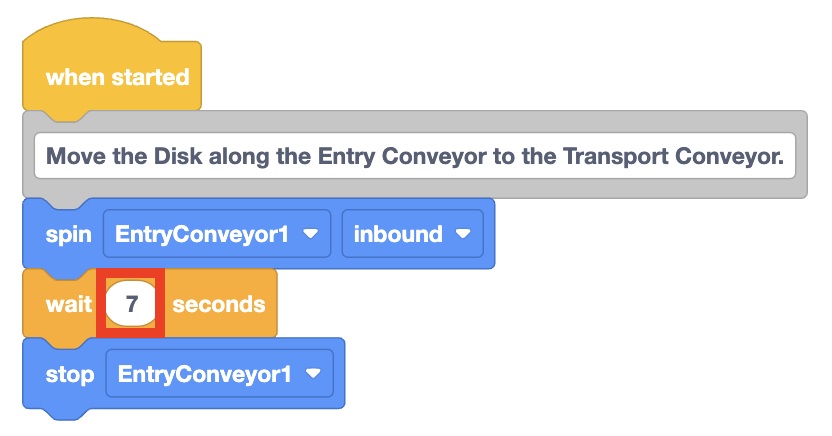
Při spuštění projektu jste si pravděpodobně všimli, že vstupní dopravník neposunul disk úplně k transportnímu dopravníku. Je to proto, že parametr v bloku Wait je nastaven pouze na 1 sekundu. Pro roztočení vstupního dopravníku je potřeba více času, než se spustí blok Stop motor.
Při sestavování a testování projektu s časově řízenými pohyby může být nutné upravit parametr v bloku Wait vícekrát, abyste dosáhli správného načasování.
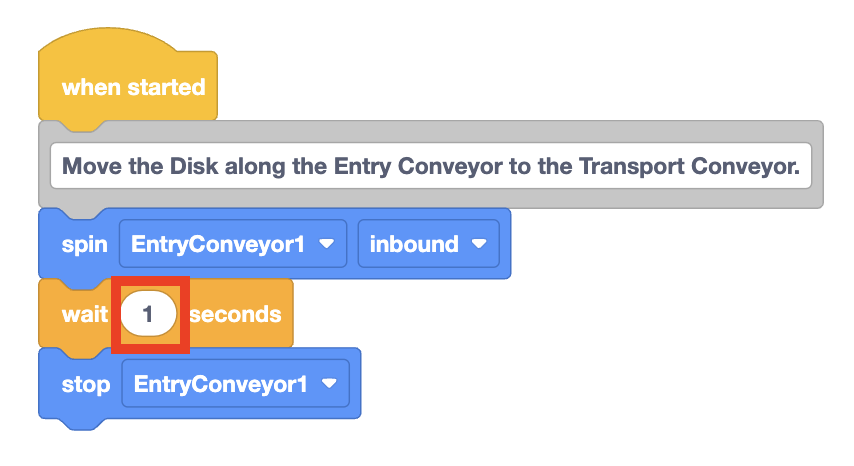
Upravte parametr v bloku Wait na 7 sekund a znovu stáhněte a spusťte projekt pro otestování.
Dopravil vstupní dopravník disk až na konec, kde ho mohl vyzvednout transportní dopravník? Pokud ne, upravte parametr znovu, dokud se to nestane.
Poznámka:Počet sekund potřebný v parametru se může lišit. Používejte čísla, která spolehlivě fungují pro vaši základnu CTE Workcell.
Přidejte bloky potřebné k pohybu disku po dopravníku.
Všimněte si, že se jedná o stejné bloky, jaké se používají pro vstupní dopravník, pouze s parametry nastavenými na „TransportConveyor2“ a „forward“.
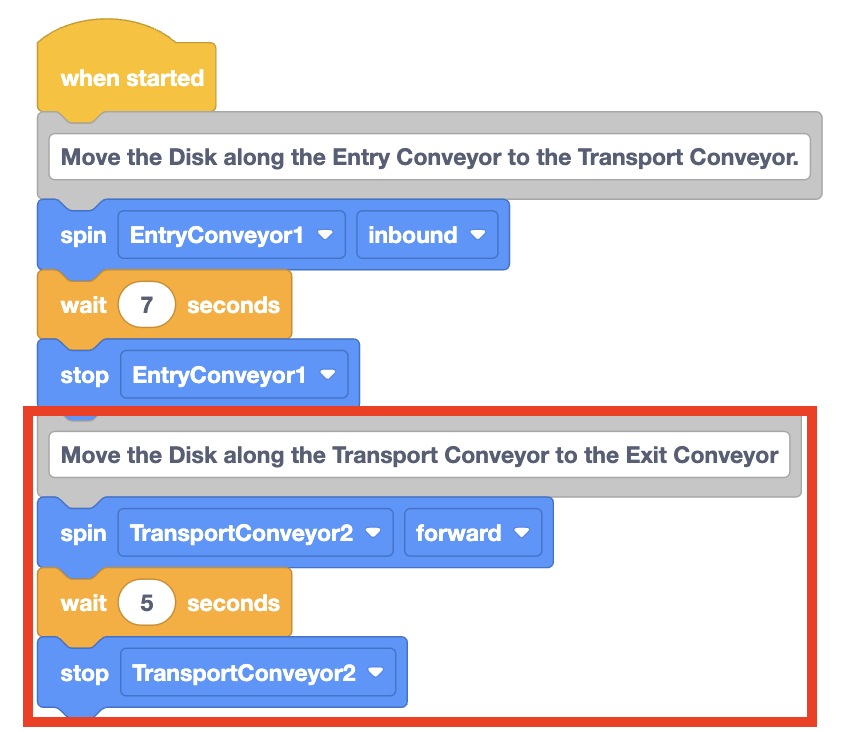
Stáhněte si projekt do Brainu a spusťte ho pro otestování. Pohybuje se disk po celé délce dopravníku a zastavuje se u odklápěcího zařízení? Pokud ne, upravte parametr bloku Waitdokud se tak nestane.
Pro vaši informaci
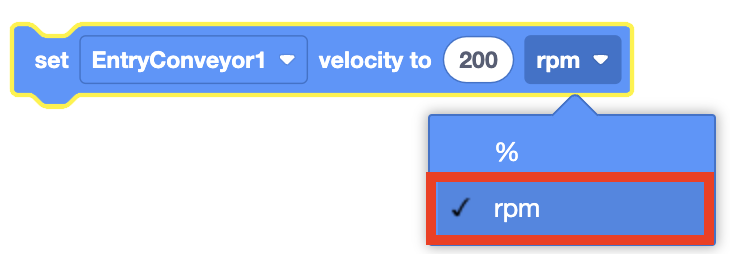
Rychlost, s jakou se objekty pohybují po dopravníku, lze upravit pomocí bloku Set motor velocity . Parametr v bloku lze změnit tak, aby se dopravník otáčel rychleji nebo pomaleji. Výchozí rychlost dopravníku je 50 % a maximální rychlost je 100 %.
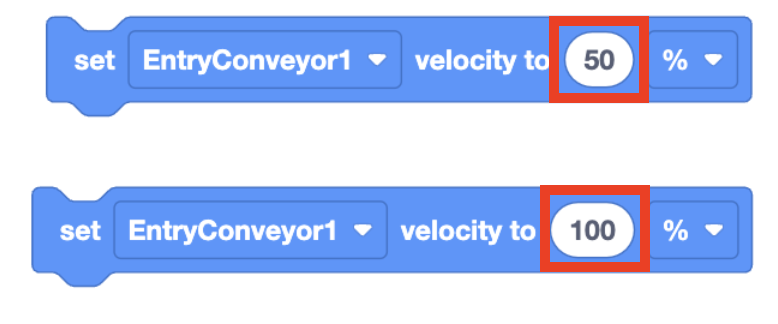
Parametr bloku Nastavení rychlosti motoru lze také nastavit pomocí otáček za minutu (rpm) nebo otáček za minutu.
Aktivita
Nyní, když jste použili časově řízené pohyby k naprogramování dopravníků pro přesun disku ze vstupního dopravníku a podél transportního dopravníku k výstupnímu dopravníku, budete pokračovat ve svém projektu, kterým budete disk přesouvat na konec výstupního dopravníku, aniž by spadl z konce dopravníku.
Příprava:Umístěte disk na začátek vstupního dopravníku, jak je znázorněno níže.
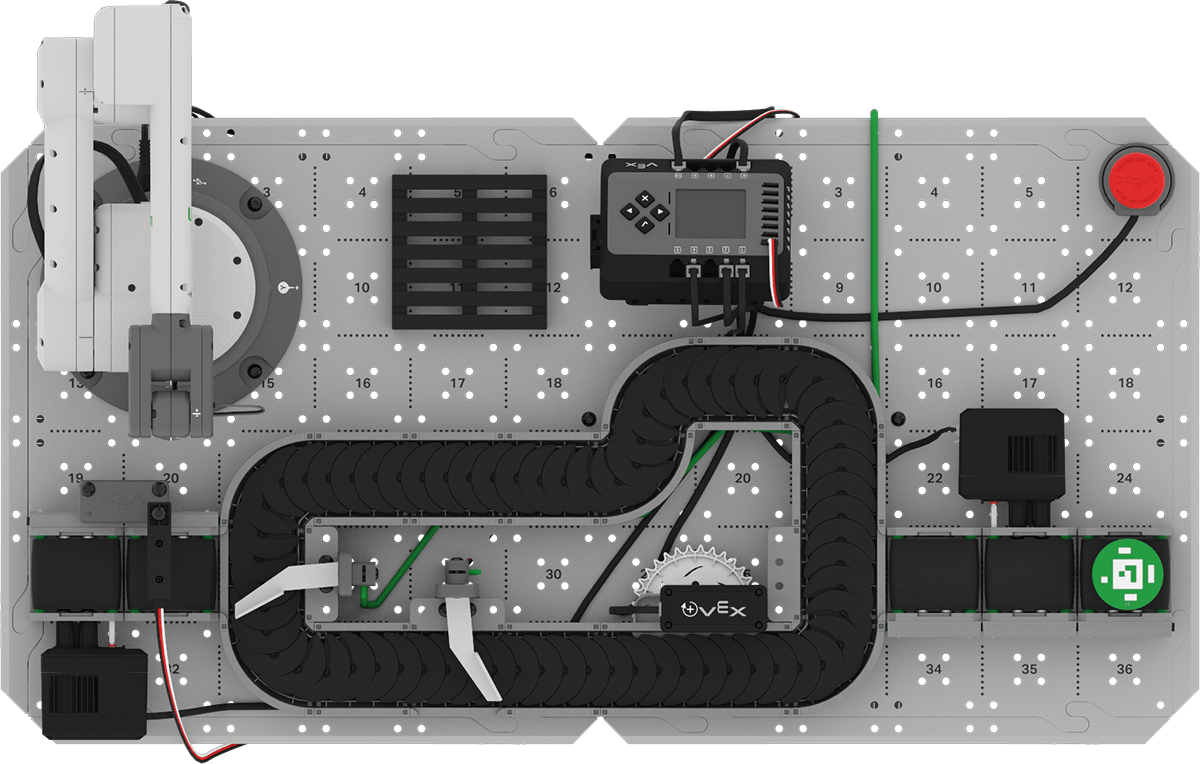
Aktivita: Vytvořte projekt VEXcode, který bude přepravovat disk ze vstupního dopravníku podél transportního dopravníku na konec výstupního dopravníku.
- Naplánujte si, jak budete na svém projektu stavět, abyste disk přesunuli na konec výstupního dopravníku.
- Zdokumentujte svůj plán do svého technického sešitu.
- Přejmenujte svůj projekt Jednotka 4 Lekce 2 Aktivita a uložte si jej do zařízení, než začnete projekt upravovat.
- Upravte projekt ve VEXcode tak, aby odpovídal plánu, na kterém se vaše skupina dohodla.
- Umístěte disk na počáteční bod vstupního dopravníku a spusťte projekt. Posouvají dopravníky disk na konec výstupního dopravníku, aniž by spadl? Po dokončení pohybu dopravníků projekt zastavte a svá pozorování zaznamenejte do svého technického sešitu.
- Pokud disk spadne z konce výstupního dopravníku, upravujte projekt, dokud se disk nedostane na konec dopravníku, aniž by spadnul. Veškeré změny si zaznamenejte do svého technického deníku.
Ověřte si své znalosti
Než přejdete k další lekci, ujistěte se, že rozumíte konceptům v této lekci, a to zodpovězením následujících otázek ve svém technickém sešitě.
Otázky k prověření vašich znalostí > (dokument Google / .docx / .pdf)
Vyberte Další > pro přechod k odrazu střední jednotky.