
പാഠം 2: കോഡിംഗ് കൺവെയറുകൾ
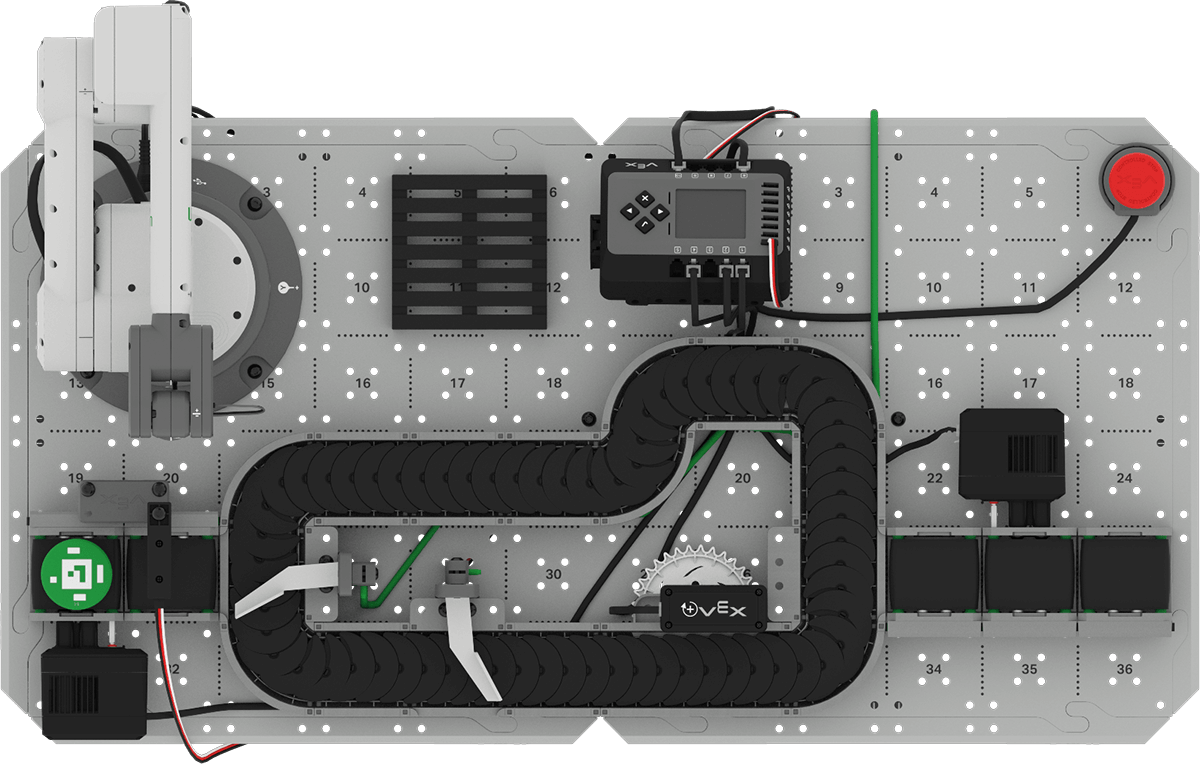
മുമ്പ്, കൺവെയറുകളെക്കുറിച്ചും ഡൈവേർട്ടറുകളെക്കുറിച്ചും, വ്യാവസായിക സാഹചര്യങ്ങളിൽ വസ്തുക്കളുടെ കാര്യക്ഷമമായ ഗതാഗതം അവ എങ്ങനെ സാധ്യമാക്കുന്നുവെന്നും നിങ്ങൾ പഠിച്ചിരുന്നു. CTE വർക്ക്സെല്ലിലെ കൺവെയറുകൾ എങ്ങനെ പ്രവർത്തിക്കുന്നു എന്നതിനെക്കുറിച്ചും നിങ്ങൾ പഠിച്ചു. ഇപ്പോൾ നിങ്ങൾ ഡിസ്കുകൾ കൊണ്ടുപോകുന്നതിനായി കൺവെയറുകൾ കോഡ് ചെയ്യാൻ തയ്യാറാണ്. ഈ പാഠത്തിൽ, നിങ്ങൾ പഠിക്കും:
- VEXcode-ൽ വ്യക്തിഗത കൺവെയർ മോട്ടോറുകൾ എങ്ങനെ ക്രമീകരിക്കാം.
- സമയാധിഷ്ഠിത ചലനങ്ങൾ ഉപയോഗിച്ച് ഡിസ്കുകൾ ഒരു കൺവെയറിൽ നിന്ന് മറ്റൊന്നിലേക്ക് നീക്കുന്നതിനുള്ള ഒരു VEXcode പ്രോജക്റ്റ് എങ്ങനെ സൃഷ്ടിക്കാം.
ഈ പാഠം അവസാനിക്കുമ്പോഴേക്കും, എൻട്രി കൺവെയറിൽ നിന്ന് ട്രാൻസ്പോർട്ട് കൺവെയറിലൂടെ എക്സിറ്റ് കൺവെയറിലേക്ക് ഒരു ഡിസ്ക് കൊണ്ടുപോകുന്നതിനുള്ള ഒരു പ്രോജക്റ്റ് നിങ്ങൾ നിർമ്മിക്കും.
കൺവെയറുകൾ കോഡ് ചെയ്യാൻ തയ്യാറെടുക്കുന്നു
CTE വർക്ക്സെല്ലിലെ കൺവെയറുകൾ കോഡ് ചെയ്യുന്നതിന് മുമ്പ്, തയ്യാറാകുന്നതിന് നിങ്ങൾ പൂർത്തിയാക്കേണ്ട ചില പ്രധാന ജോലികൾ ഉണ്ട്. നിങ്ങൾ ഓരോ കൺവെയർ മോട്ടോറും VEXcode-ൽ കോൺഫിഗർ ചെയ്യേണ്ടതുണ്ട്. എല്ലാ കൺവെയർ മോട്ടോറുകളും ഉൾപ്പെടുത്തിയിട്ടുണ്ടെന്ന് ഉറപ്പാക്കാൻ, നിയന്ത്രിത സ്റ്റോപ്പ് ആരംഭിക്കുന്ന ബ്ലോക്കുകളുടെ സ്റ്റാക്ക് നിങ്ങൾ പരിഷ്കരിക്കേണ്ടതുണ്ട്.
VEXcode-ൽ വ്യക്തിഗത മോട്ടോറുകൾ ക്രമീകരിക്കുന്നു
സിടിഇ വർക്ക്സെല്ലിലെ ഓരോ കൺവെയറും ഒരു പ്രത്യേക മോട്ടോർ ഉപയോഗിച്ചാണ് നിയന്ത്രിക്കുന്നത്. ഇക്കാരണത്താൽ, നിങ്ങളുടെ പ്രോജക്റ്റ് ആരംഭിക്കുന്നതിന് മുമ്പ് ഓരോ മോട്ടോറും VEXcode-ലെ കോൺഫിഗറേഷനിലേക്ക് ചേർക്കേണ്ടതുണ്ട്. കൂടാതെ, ഓരോ മോട്ടോറിനും ശരിയായ പേര് നൽകിയിട്ടുണ്ടെന്നും വസ്തുക്കൾ വിജയകരമായി കൊണ്ടുപോകുന്നതിന് ആവശ്യമായ ദിശയിൽ കറങ്ങാൻ അത് സജ്ജീകരിച്ചിട്ടുണ്ടെന്നും നിങ്ങൾ ഉറപ്പാക്കേണ്ടതുണ്ട്.
എൻട്രി കൺവെയർ മോട്ടോർ കോൺഫിഗർ ചെയ്യുന്നു
ബ്രെയിൻ CTE 6-ആക്സിസ് ആം ബേസ് ടെംപ്ലേറ്റ് പ്രോജക്റ്റ് തുറക്കുക.
കുറിപ്പ്:VEXcode EXP-ൽ ഉദാഹരണങ്ങൾ എങ്ങനെ തുറക്കാം എന്നതിനെക്കുറിച്ചുള്ള ഓർമ്മപ്പെടുത്തലിനായി, മുമ്പത്തെ യൂണിറ്റ് കാണുക.
പ്രോജക്റ്റിന്റെ പേര് യൂണിറ്റ് 4 പാഠം 2എന്ന് മാറ്റി നിങ്ങളുടെ ഉപകരണത്തിൽ സേവ് ചെയ്യുക.

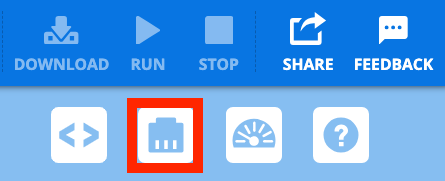
ഉപകരണ വിൻഡോ തുറക്കുക.
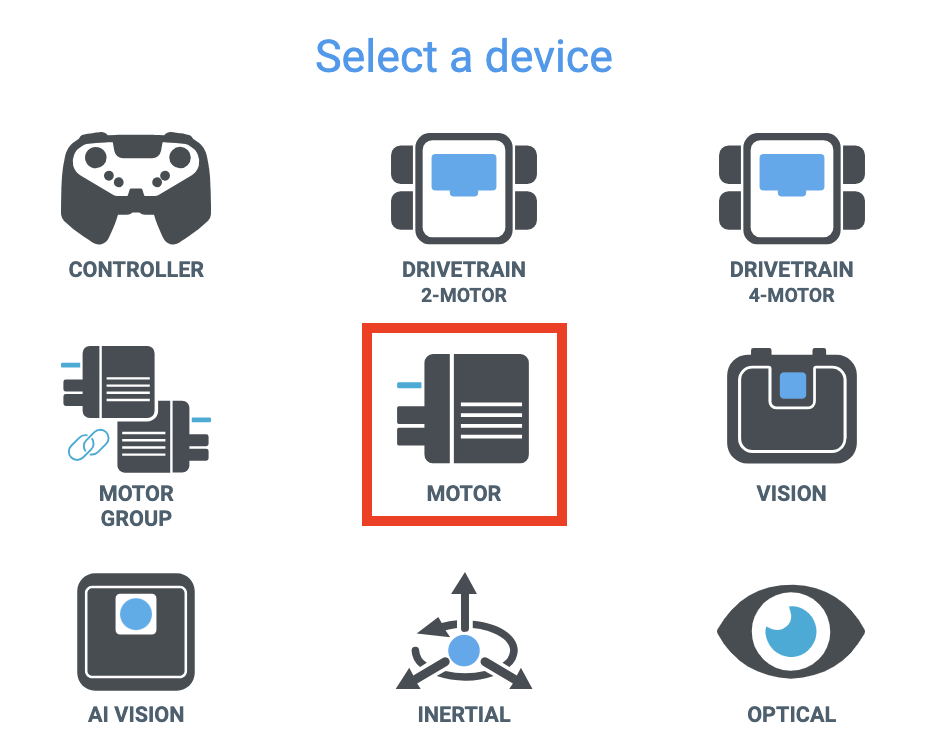
തിരഞ്ഞെടുക്കുക ഒരു ഉപകരണം ചേർക്കുക.
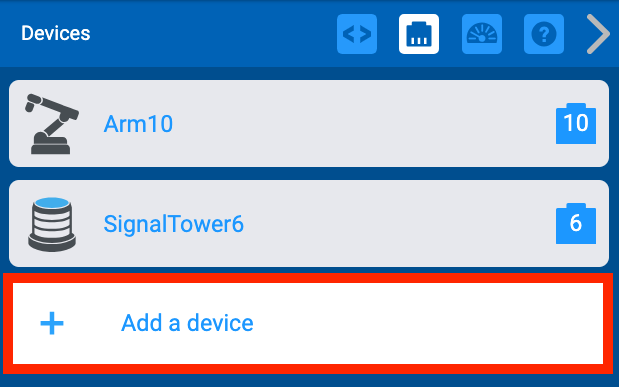
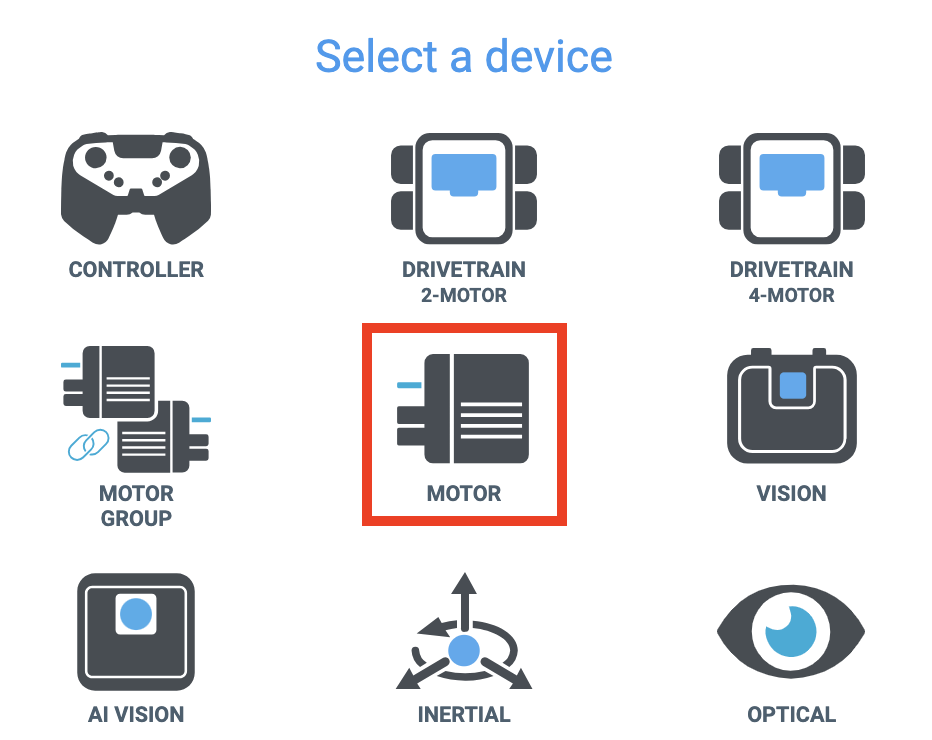
ഉപകരണങ്ങളുടെ പട്ടികയിൽ നിന്ന് മോട്ടോർ തിരഞ്ഞെടുക്കുക.
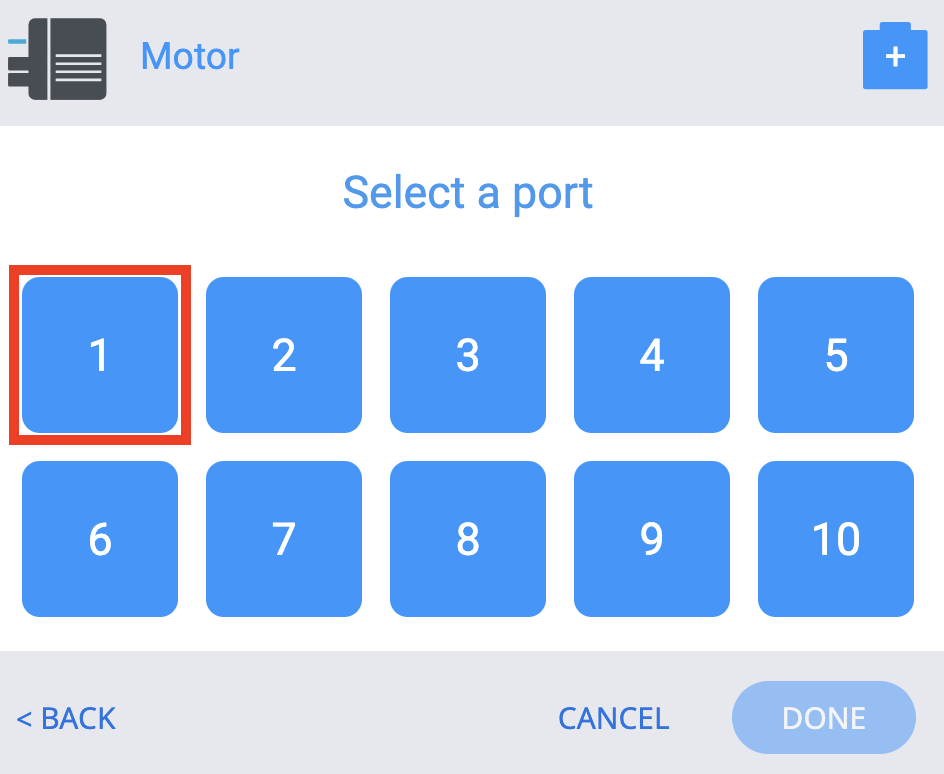
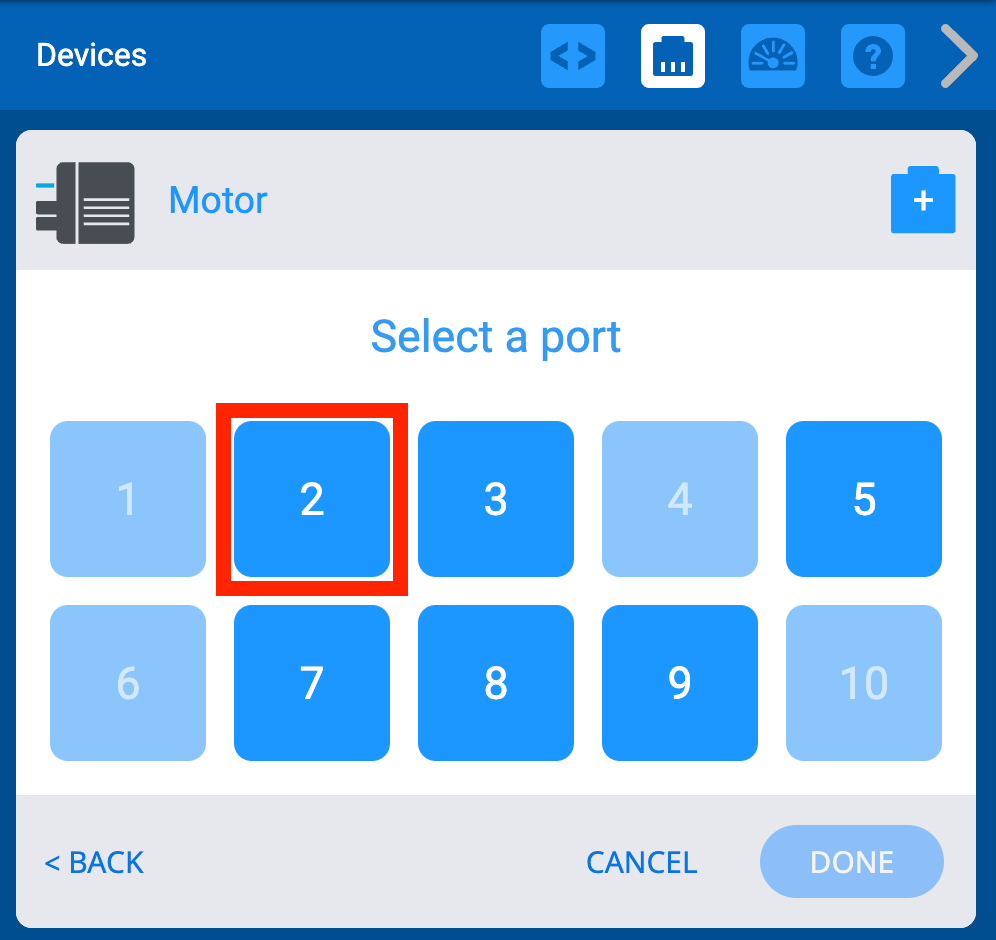
എൻട്രി കൺവെയർ മോട്ടോർ പ്ലഗ് ചെയ്തിരിക്കുന്ന പോർട്ടുമായി പൊരുത്തപ്പെടുന്നതിന് ബ്രെയിനിലെ പോർട്ട് 1 തിരഞ്ഞെടുക്കുക.
കുറിപ്പ്:എൻട്രി കൺവെയർ മോട്ടോർ ബ്രെയിനിലെ പോർട്ട് 1-ൽ പ്ലഗ് ചെയ്തിട്ടുണ്ടെന്ന് ഉറപ്പാക്കുക.
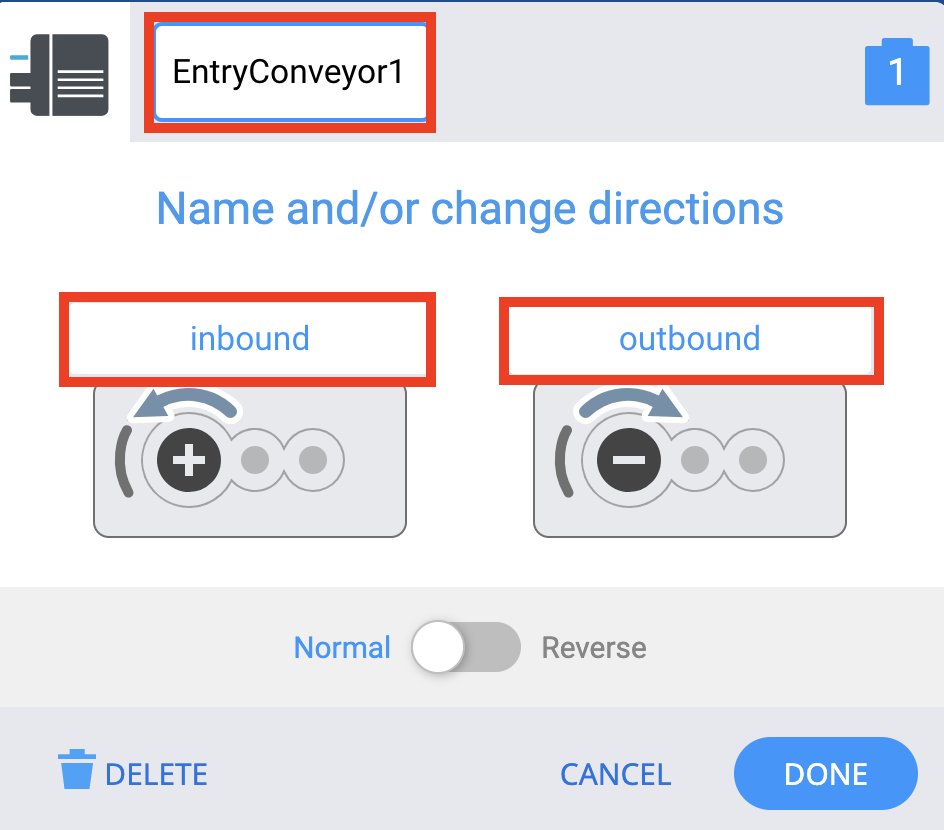
ഈ ചിത്രവുമായി പൊരുത്തപ്പെടുന്നതിന് ലേബലുകൾ എഡിറ്റ് ചെയ്യുക.
- എൻട്രി കൺവെയർ മോട്ടോർ എന്ന് വ്യക്തമായി തിരിച്ചറിയുന്ന തരത്തിൽ മോട്ടോറിന്റെ പേര് മാറ്റണം. പേരിലുള്ള നമ്പർ അത് പ്ലഗിൻ ചെയ്തിരിക്കുന്ന പോർട്ടിനെ സൂചിപ്പിക്കുന്നു.
- ഡിഫോൾട്ട് ഫോർവേഡ് ഉം റിവേഴ്സ്ലേബലുകളും കൺവെയറുകളുടെ ചലനത്തെ വേണ്ടത്ര വിവരിക്കാത്തതിനാൽ, മോട്ടോറിന്റെ ദിശകളെ ഇൻബൗണ്ട് ഉം ഔട്ട്ബൗണ്ട്ആയി പുനർനാമകരണം ചെയ്യണം.
ഇൻബൗണ്ട് എന്നാൽ എൻട്രി കൺവെയർ ട്രാൻസ്പോർട്ട് കൺവെയറിനെ ലേക്ക് കറക്കുന്നു എന്നാണ് അർത്ഥമാക്കുന്നത്. ഔട്ട്ബൗണ്ട്എന്നാൽ എൻട്രി കൺവെയർ ട്രാൻസ്പോർട്ട് കൺവെയറിൽ നിന്ന് അകലെ കറങ്ങുന്നു എന്നാണ് അർത്ഥമാക്കുന്നത്.
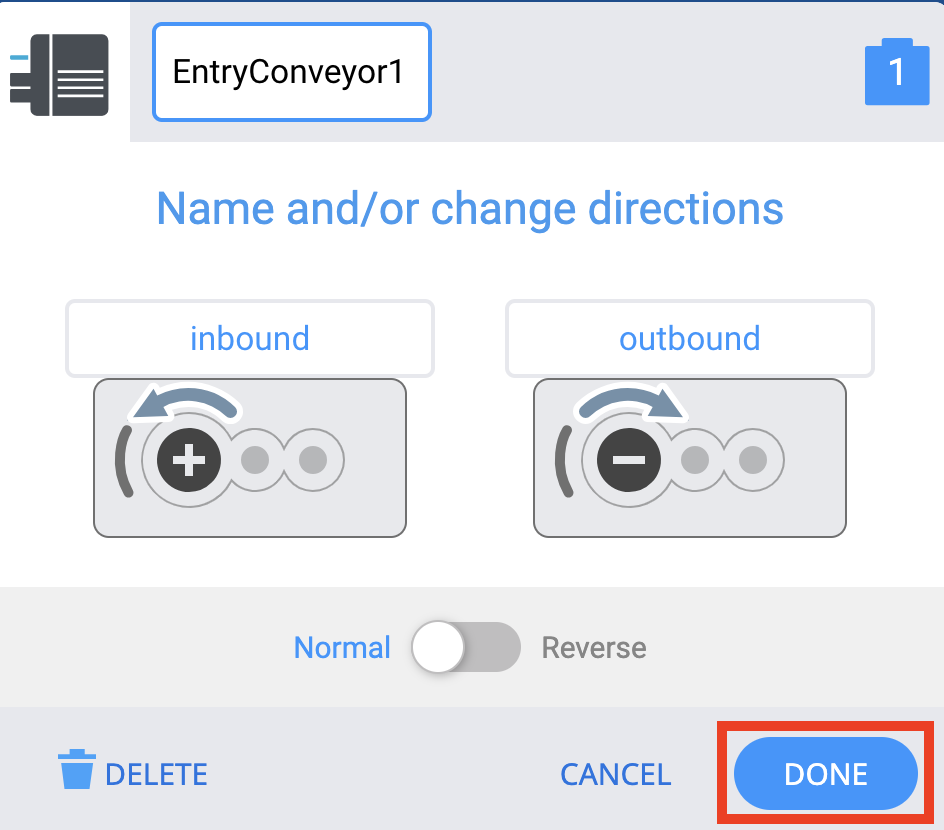
തിരഞ്ഞെടുക്കുക പൂർത്തിയായി.
എക്സിറ്റ് കൺവെയർ മോട്ടോർ കോൺഫിഗർ ചെയ്യുന്നു
എൻട്രി കൺവെയർ മോട്ടോറിന്റെ അതേ രീതിയിൽ എക്സിറ്റ് കൺവെയർ മോട്ടോറും കോൺഫിഗർ ചെയ്യാൻ കഴിയും.
ഡിവൈസസ് വിൻഡോയിൽ, ഡിവൈസുകളുടെ പട്ടികയിൽ നിന്ന് മോട്ടോർ തിരഞ്ഞെടുക്കുക.

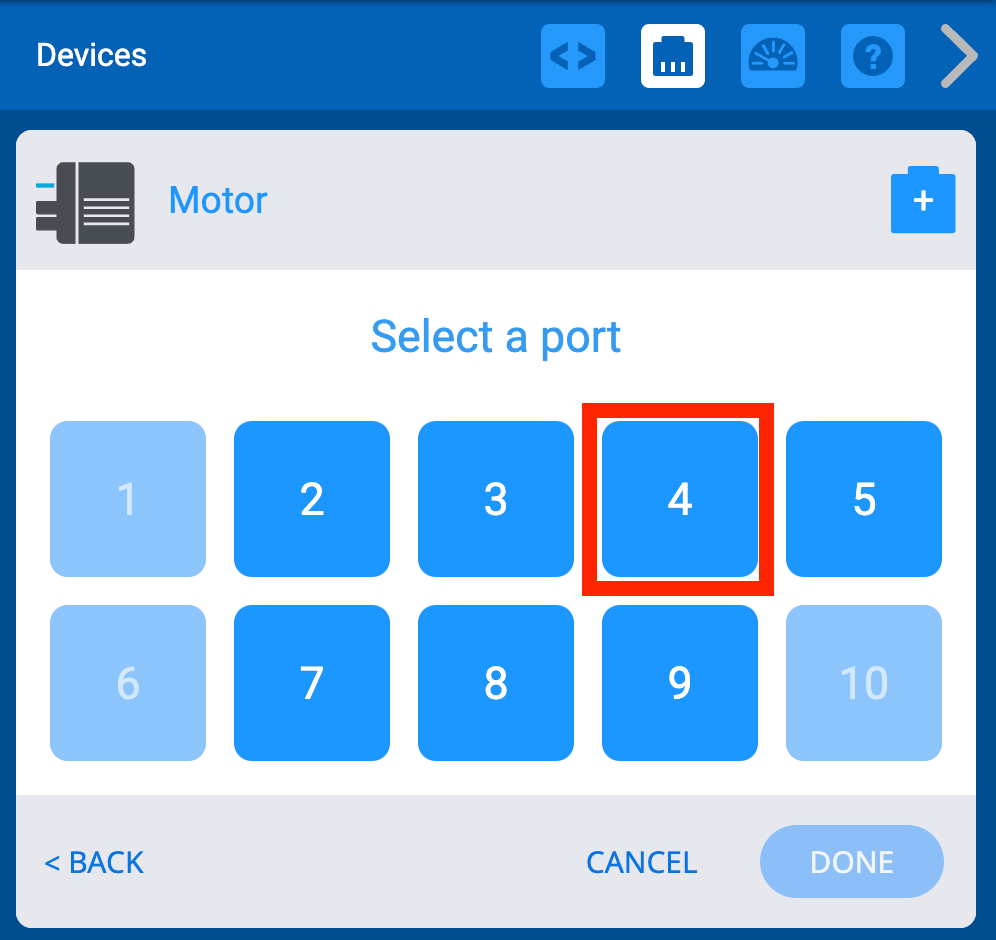
എക്സിറ്റ് കൺവെയർ മോട്ടോർ പ്ലഗ് ചെയ്തിരിക്കുന്ന പോർട്ടുമായി പൊരുത്തപ്പെടുന്നതിന് പോർട്ട് 4 തിരഞ്ഞെടുക്കുക.
കുറിപ്പ്:എക്സിറ്റ് കൺവെയർ മോട്ടോർ ബ്രെയിനിലെ പോർട്ട് 4-ൽ പ്ലഗ് ചെയ്തിട്ടുണ്ടെന്ന് ഉറപ്പാക്കുക.
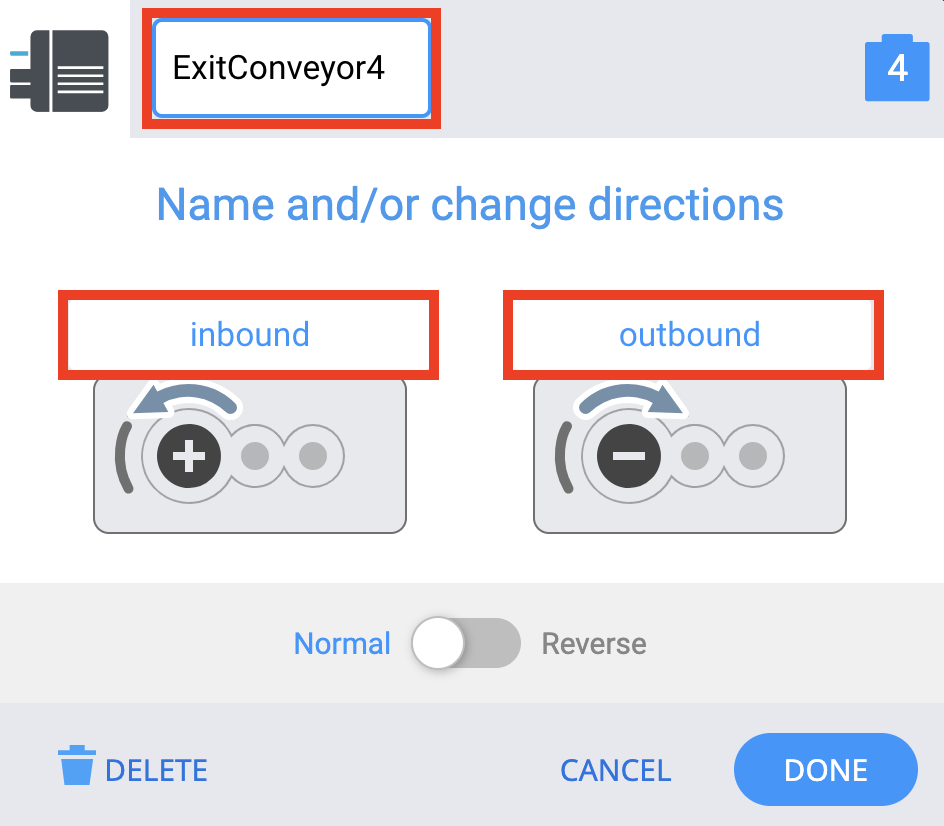
ചിത്രത്തിലുള്ളവയുമായി പൊരുത്തപ്പെടുന്നതിന് ലേബലുകൾ എഡിറ്റ് ചെയ്യുക.
- എക്സിറ്റ് കൺവെയർ മോട്ടോർ എന്ന് വ്യക്തമായി തിരിച്ചറിയാൻ മോട്ടോറിന്റെ പേര് മാറ്റണം. പേരിലുള്ള നമ്പർ അത് പ്ലഗിൻ ചെയ്തിരിക്കുന്ന പോർട്ടിനെ സൂചിപ്പിക്കുന്നു.
- എൻട്രി കൺവെയറിനു വേണ്ടി മുമ്പ് ചെയ്തതുപോലെ മോട്ടോറിന്റെ ദിശകൾഇൻബൗണ്ട്ഉംഔട്ട്ബൗണ്ട്ആയി പുനർനാമകരണം ചെയ്യണം.
ഇൻബൗണ്ട്എന്നാൽ എക്സിറ്റ് കൺവെയർ ട്രാൻസ്പോർട്ട് കൺവെയറിനെമുതൽവരെ കറക്കുന്നു എന്നാണ് അർത്ഥമാക്കുന്നത്. ഔട്ട്ബൗണ്ട്എന്നാൽ എക്സിറ്റ് കൺവെയർ ട്രാൻസ്പോർട്ട് കൺവെയറിൽ നിന്ന്അകലെ കറങ്ങുന്നു എന്നാണ് അർത്ഥമാക്കുന്നത്.
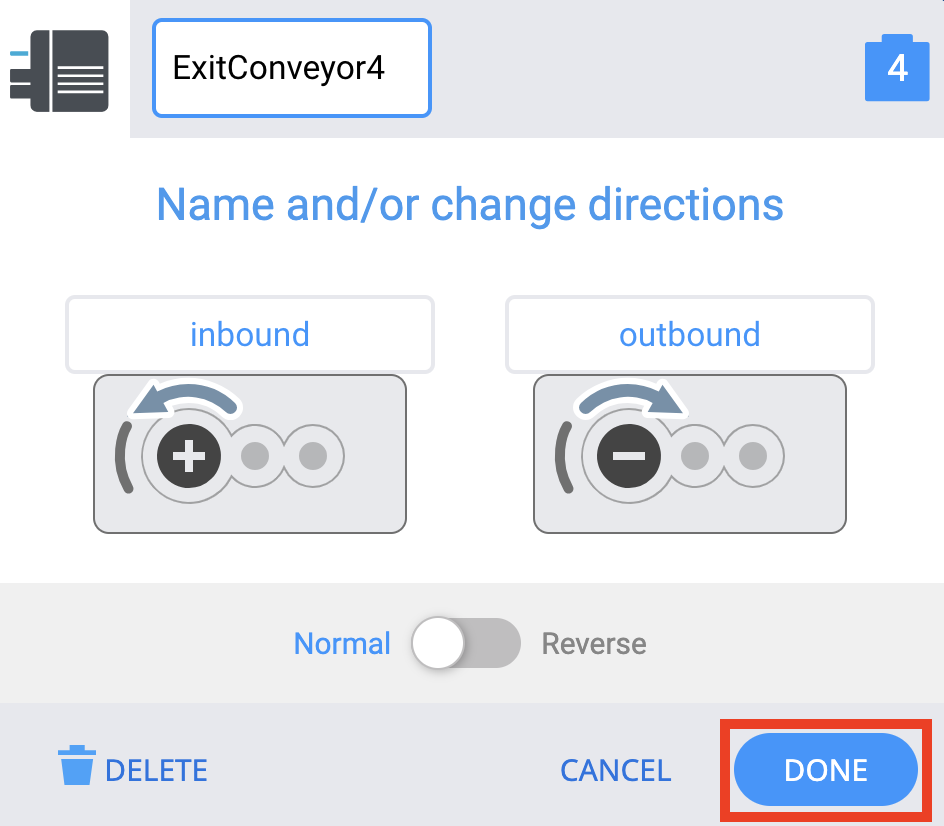
തിരഞ്ഞെടുക്കുക പൂർത്തിയായി.
ട്രാൻസ്പോർട്ട് കൺവെയർ മോട്ടോർ കോൺഫിഗർ ചെയ്യുന്നു
അവസാനമായി, നിങ്ങൾ ട്രാൻസ്പോർട്ട് കൺവെയർ മോട്ടോർ കോൺഫിഗർ ചെയ്യേണ്ടതുണ്ട്. കൂടാതെ, കൺവെയർ ആവശ്യമുള്ള ദിശയിലേക്ക് നീങ്ങുന്നതിന് നിങ്ങൾ മോട്ടോറിന്റെ ദിശ വിപരീതമാക്കേണ്ടതുണ്ട്.
ഡിവൈസസ് വിൻഡോയിൽ, ഡിവൈസസ് ലിസ്റ്റിൽ നിന്ന് മോട്ടോർ തിരഞ്ഞെടുക്കുക.
ട്രാൻസ്പോർട്ട് കൺവെയർ മോട്ടോർ പ്ലഗ് ചെയ്തിരിക്കുന്ന പോർട്ടുമായി പൊരുത്തപ്പെടുന്നതിന് പോർട്ട് 2 തിരഞ്ഞെടുക്കുക.
കുറിപ്പ്:ട്രാൻസ്പോർട്ട് കൺവെയർ മോട്ടോർ ബ്രെയിനിലെ പോർട്ട് 2-ൽ പ്ലഗ് ചെയ്തിട്ടുണ്ടെന്ന് ഉറപ്പാക്കുക.
മോട്ടോറിന്റെ പേര് എന്ന് മാറ്റുക TransportConveyor2.
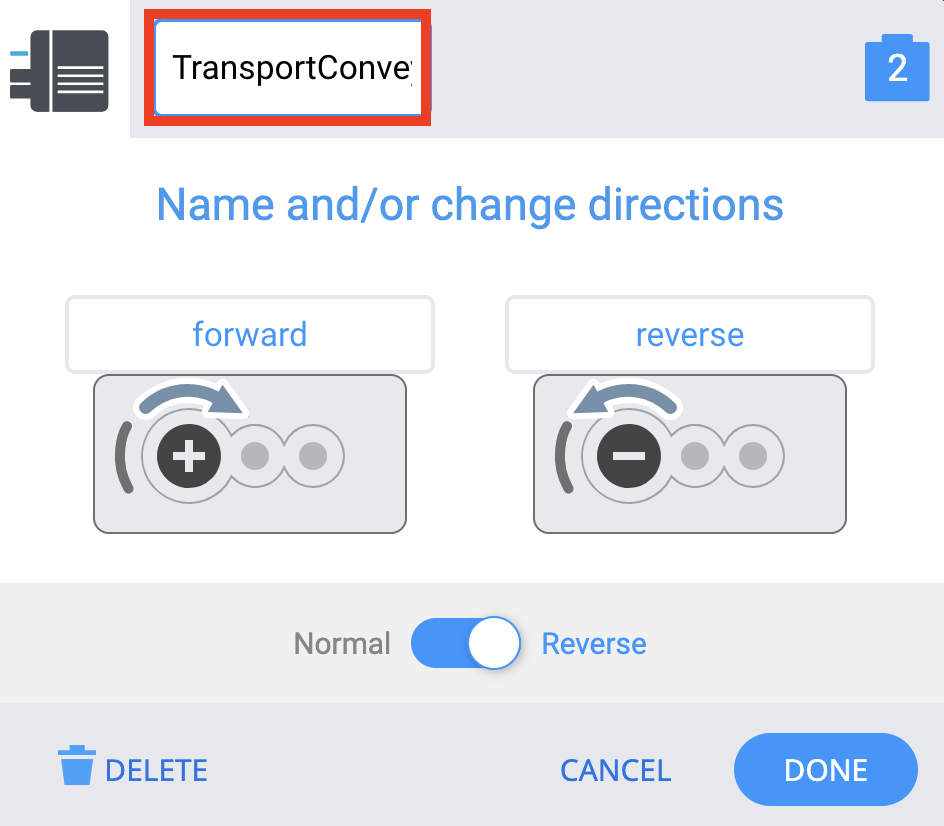
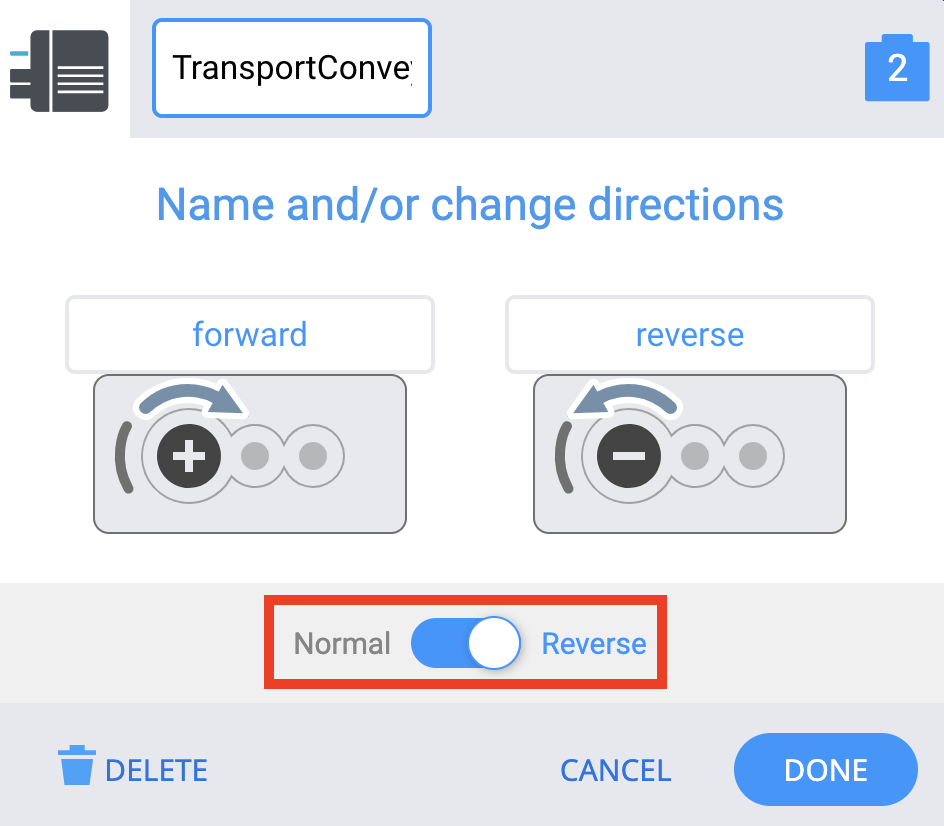
ട്രാൻസ്പോർട്ട് കൺവെയർ മെറ്റീരിയലുകൾ ശരിയായ ദിശകളിലേക്ക് നീക്കുന്നതിന്, മോട്ടോർ ദിശ സാധാരണ ൽ നിന്ന് റിവേഴ്സ്ലേക്ക് മാറ്റുന്നതിന് നിങ്ങൾ ടോഗിൾ ബട്ടൺ തിരഞ്ഞെടുക്കേണ്ടതുണ്ട്.
ട്രാൻസ്പോർട്ട് കൺവെയർ മോട്ടോർ ഡയറക്ഷൻ
ട്രാൻസ്പോർട്ട് കൺവെയർ മോട്ടോർ കോൺഫിഗർ ചെയ്യുമ്പോൾ, നിങ്ങൾ അതിന്റെ ദിശ മാറ്റേണ്ടി വന്നു. കാരണം, മോട്ടോർ ഡിഫോൾട്ടായി ട്രാൻസ്പോർട്ട് കൺവെയറിനെ ഘടികാരദിശയിൽ തിരിക്കും. മോട്ടോറിന്റെ ലേബലിനെ അടിസ്ഥാനമാക്കി, മോട്ടോറിന്റെ ഡിഫോൾട്ട് സ്പിൻ ദിശ നിങ്ങൾക്ക് നിർണ്ണയിക്കാനാകും.
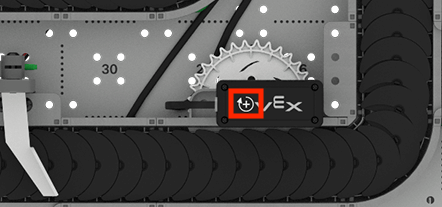
ഓരോ മോട്ടോറിന്റെയും മുകളിൽ, ഏത് ദിശയാണ് പോസിറ്റീവ് എന്ന് സൂചിപ്പിക്കുന്ന ഒരു ഐക്കൺ ഉണ്ട്. ട്രാൻസ്പോർട്ട് കൺവെയറിന്റെ കാര്യത്തിൽ, അമ്പടയാളം ഘടികാരദിശയിലാണ് ചൂണ്ടുന്നത്. ഇതിനർത്ഥം, ഡിഫോൾട്ടായി, ട്രാൻസ്പോർട്ട് കൺവെയറിൽ സ്ഥാപിക്കുന്ന ഏതൊരു ഡിസ്കും എൻട്രി കൺവെയറിൽ നിന്ന് ആദ്യത്തെ ഡൈവേർട്ടറിലേക്ക് കറങ്ങും എന്നാണ്. കോൺഫിഗറേഷനിൽ മോട്ടോർ റിവേഴ്സ് ചെയ്യുന്നതിലൂടെ, കൺവെയറിലെ ശരിയായ പാതയായി ചർച്ച ചെയ്യപ്പെടുന്ന ദിശയുമായി ഫോർവേഡ്ദിശ പൊരുത്തപ്പെടുന്നുണ്ടെന്ന് നിങ്ങൾ ഉറപ്പാക്കുന്നു.
നിയന്ത്രിത സ്റ്റോപ്പ് പരിഷ്കരിക്കുന്നു
ഇപ്പോൾ നിങ്ങൾ എല്ലാ കൺവെയർ മോട്ടോറുകളും കോൺഫിഗർ ചെയ്തുകഴിഞ്ഞു, നിയന്ത്രിത സ്റ്റോപ്പ് അപ്ഡേറ്റ് ചെയ്യേണ്ടതുണ്ട്. ഒരു നിയന്ത്രിത സ്റ്റോപ്പ് പ്രവർത്തനക്ഷമമാകുമ്പോൾ, എല്ലാ മോട്ടോറുകളും പ്രവർത്തിക്കുന്നത് നിർത്തണം, അതുവഴി CTE വർക്ക്സെൽ ബേസ് സുരക്ഷിതമായി സഞ്ചരിക്കാൻ കഴിയുമെന്ന് നിങ്ങൾക്ക് ഉറപ്പാക്കാൻ കഴിയും. ഈ കൺവെയർ മോട്ടോറുകൾ നിർത്താൻ നിങ്ങൾനിയന്ത്രിത സ്റ്റോപ്പ്ഹാറ്റ് ബ്ലോക്കിലേക്ക് ബ്ലോക്കുകൾ ചേർക്കാൻ പോകുന്നു.
നിയന്ത്രിത സ്റ്റോപ്പിൽ ആവശ്യമായ കൺവെയർ പെരുമാറ്റങ്ങൾ വിവരിക്കുന്നതിന് ഒരു കമന്റ് സൃഷ്ടിക്കുക.

നിലവിലുള്ള ബ്ലോക്കുകളുടെ സ്റ്റാക്കിലേക്ക്കമന്റ് ബ്ലോക്ക് ചേർക്കുക.
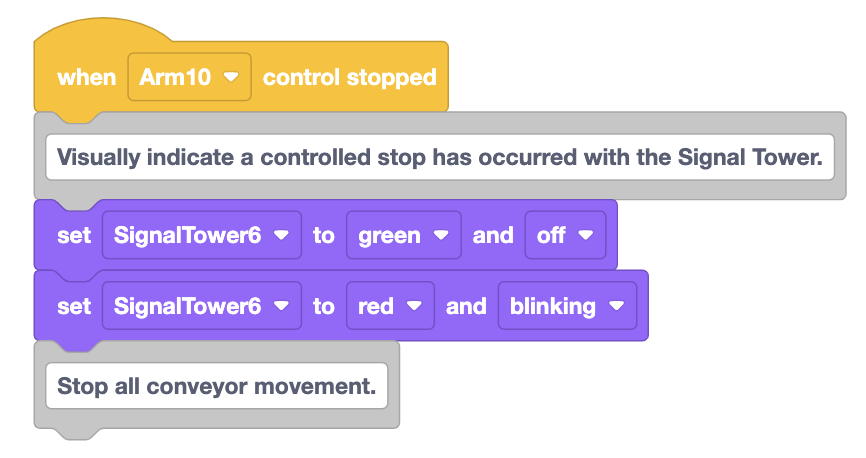
എൻട്രി കൺവെയർ നിർത്താൻ സ്റ്റോപ്പ് മോട്ടോർ ബ്ലോക്ക് പുറത്തെടുത്ത് ബ്ലോക്കുകളുടെ സ്റ്റാക്കിൽ ഘടിപ്പിക്കുക.
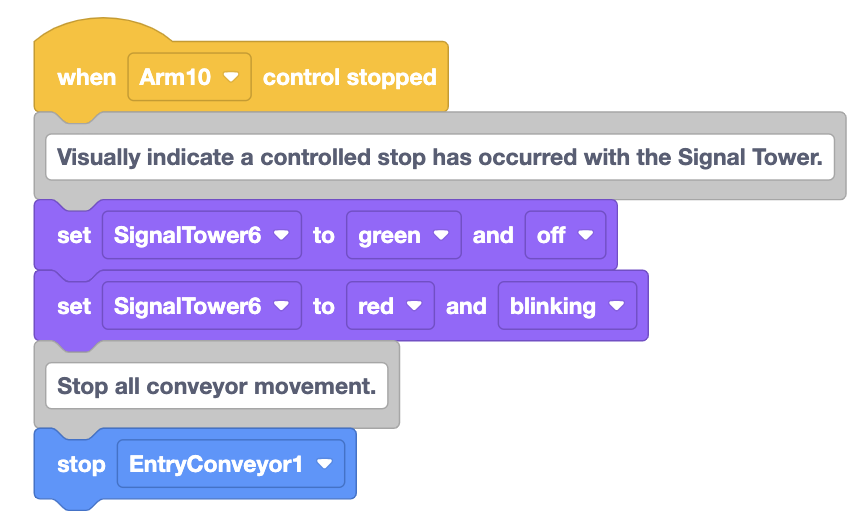
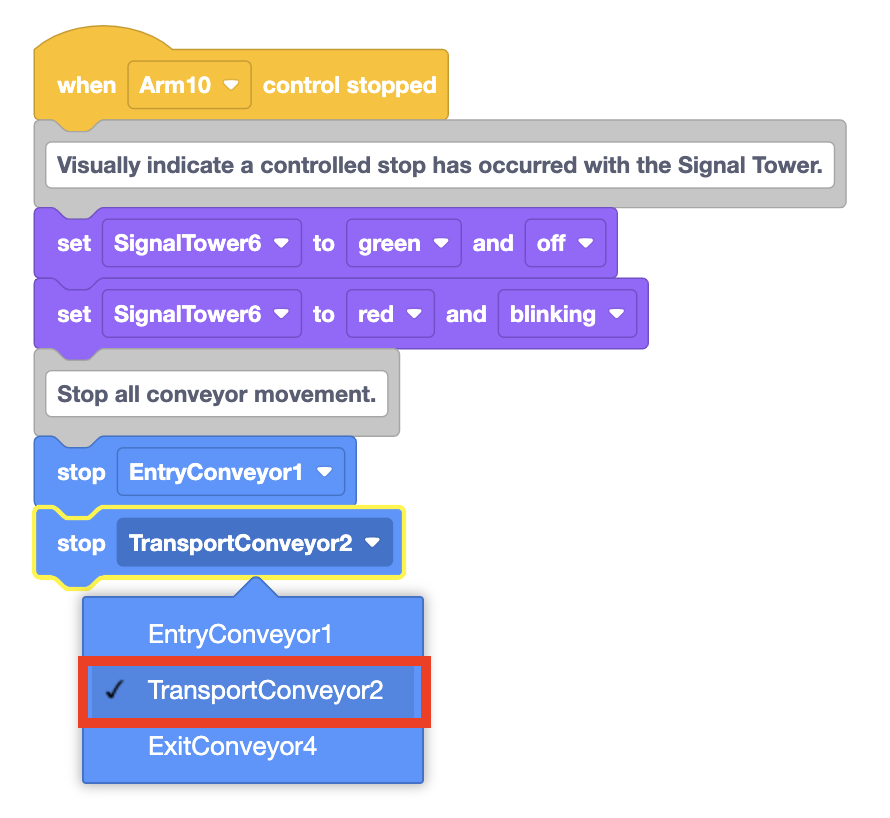
മറ്റൊരു സ്റ്റോപ്പ് മോട്ടോർ ബ്ലോക്ക് പുറത്തെടുത്ത് ബ്ലോക്കുകളുടെ സ്റ്റാക്കിന്റെ അടിയിൽ ഘടിപ്പിക്കുക.
ഡ്രോപ്പ് ഡൗൺ മെനു തുറക്കാൻ അമ്പടയാളം തിരഞ്ഞെടുക്കുക, ട്രാൻസ്പോർട്ട് കൺവെയർ ഒരു നിയന്ത്രിത സ്റ്റോപ്പിൽ നിർത്തുന്നതിനുള്ള പാരാമീറ്റർ സജ്ജമാക്കാൻ 'TransportConveyor2' തിരഞ്ഞെടുക്കുക.
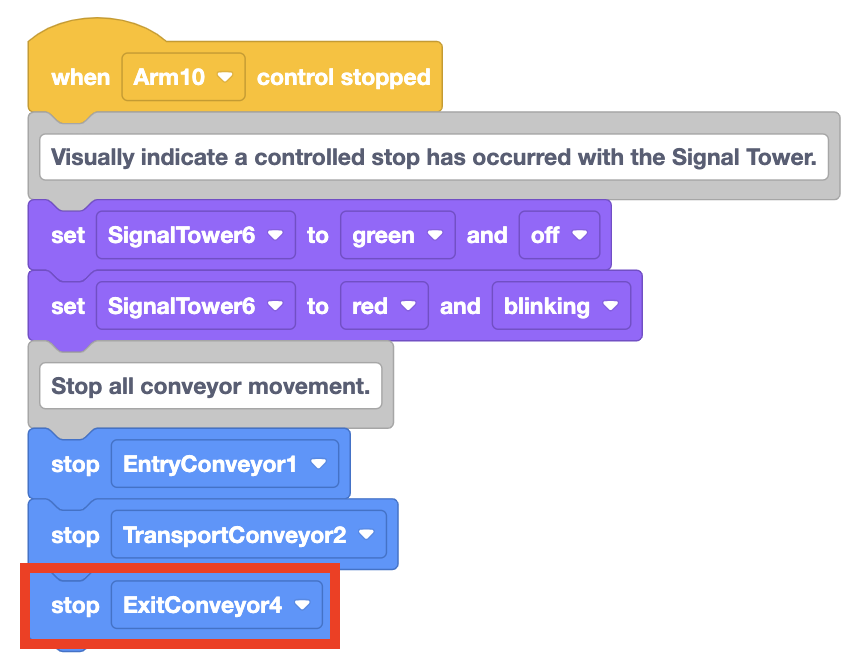
സ്റ്റാക്കിലേക്ക് മൂന്നാമത്തെ സ്റ്റോപ്പ് മോട്ടോർ ബ്ലോക്ക് ചേർക്കുക. പാരാമീറ്റർ 'ExitConveyor4' ആയി മാറ്റുക.
കൺവെയറുകൾ ഉപയോഗിച്ച് ഒരു ഡിസ്ക് ട്രാൻസ്പോർട്ട് ചെയ്യുന്നതിനുള്ള ഒരു പ്രോജക്റ്റ് സൃഷ്ടിക്കുന്നു.
ഇപ്പോൾ നിങ്ങൾ കൺവെയർ മോട്ടോറുകൾ കോൺഫിഗർ ചെയ്യുകയും നിയന്ത്രിത സ്റ്റോപ്പ് പരിഷ്കരിക്കുകയും ചെയ്തുകഴിഞ്ഞാൽ, കൺവെയറുകൾ ഉപയോഗിച്ച് ഒരു ഡിസ്ക് കൊണ്ടുപോകുന്നതിനുള്ള ഒരു പ്രോജക്റ്റ് നിർമ്മിക്കാൻ നിങ്ങൾക്ക് ആരംഭിക്കാം. എൻട്രി കൺവെയറിൽ നിന്ന് ട്രാൻസ്പോർട്ട് കൺവെയറിലൂടെ എക്സിറ്റ് കൺവെയറിലേക്ക് ഡിസ്ക് സഞ്ചരിക്കുന്നതിനുള്ള ഒരു പ്രോജക്റ്റ് നിങ്ങൾ നിർമ്മിക്കാൻ തുടങ്ങും. അങ്ങനെ ചെയ്യുന്നതിന്, കൺവെയറുകളിലൂടെ ഡിസ്കിന്റെ ചലനം ശ്രദ്ധാപൂർവ്വം ഏകോപിപ്പിക്കണം. ഈ ഏകോപനം കൈവരിക്കാനുള്ള ഒരു മാർഗം, താഴെയുള്ള വീഡിയോയിൽ കാണിച്ചിരിക്കുന്നതുപോലെ, സമയാധിഷ്ഠിത ചലനങ്ങൾ ഉപയോഗിച്ച് ഒരു പ്രോജക്റ്റ് സൃഷ്ടിക്കുക എന്നതാണ്.
സമയാധിഷ്ഠിത ചലനങ്ങൾ
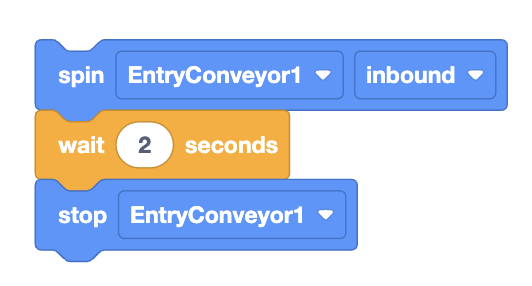
വെയ്റ്റ്, സ്പിൻ, സ്റ്റോപ്പ് മോട്ടോർ ബ്ലോക്കുകളുടെ സംയോജനം ഉപയോഗിച്ച്, ഓരോ കൺവെയറും ശരിയായ സമയത്ത് ആരംഭിച്ച് നിർത്തുന്ന ഒരു പ്രോജക്റ്റ് നിങ്ങൾക്ക് സൃഷ്ടിക്കാൻ കഴിയും, അങ്ങനെ ഒരു ഡിസ്ക് ഒരു കൺവെയറിൽ നിന്ന് മറ്റൊന്നിലേക്ക് മാറ്റാൻ കഴിയും. കൺവെയറുകൾ കോഡ് ചെയ്യുന്ന ഈ രീതിയെ സമയാധിഷ്ഠിത ചലനങ്ങൾ ഉപയോഗിച്ച് എന്ന് വിളിക്കുന്നു.
പദ്ധതി നിർമ്മിക്കുന്നു
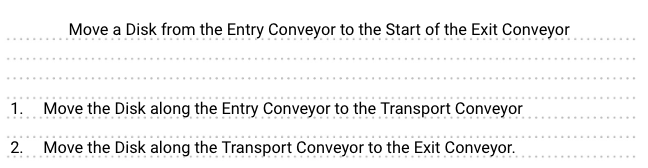
ചിത്രത്തിൽ കാണിച്ചിരിക്കുന്നതുപോലെ, ഡിസ്ക് നീക്കാൻ ആവശ്യമായ പ്ലാനിംഗ് ഘട്ടങ്ങൾ നിങ്ങളുടെ എഞ്ചിനീയറിംഗ് നോട്ട്ബുക്കിൽ രേഖപ്പെടുത്തുക.
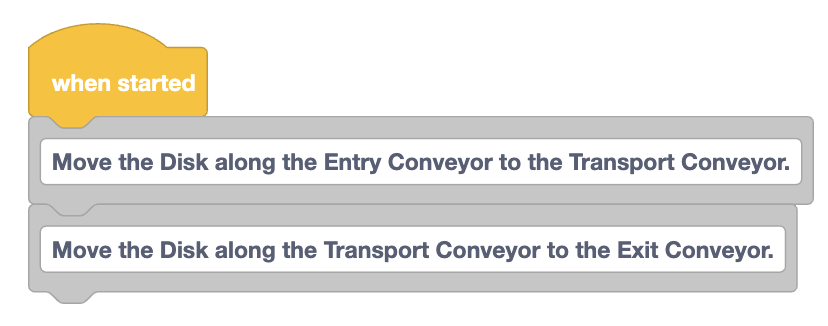
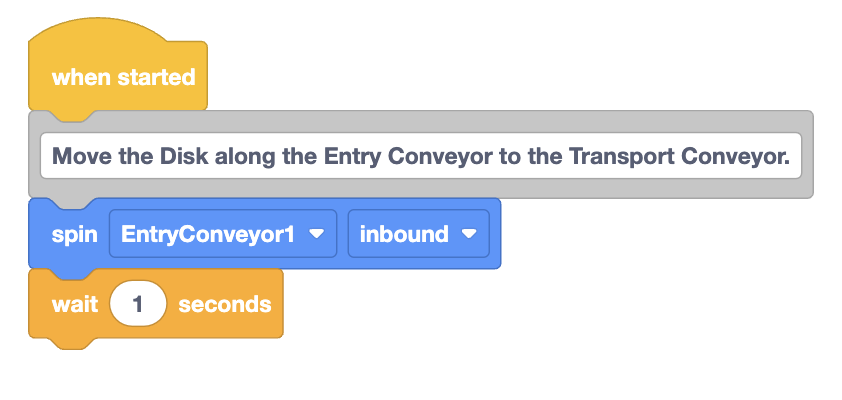
നിങ്ങളുടെ പ്ലാനിലെ ഓരോ ഘട്ടത്തിനും കമന്റ് ബ്ലോക്കുകൾ സൃഷ്ടിച്ച്, അവ When started ബ്ലോക്കിലേക്ക് അറ്റാച്ചുചെയ്യുക.
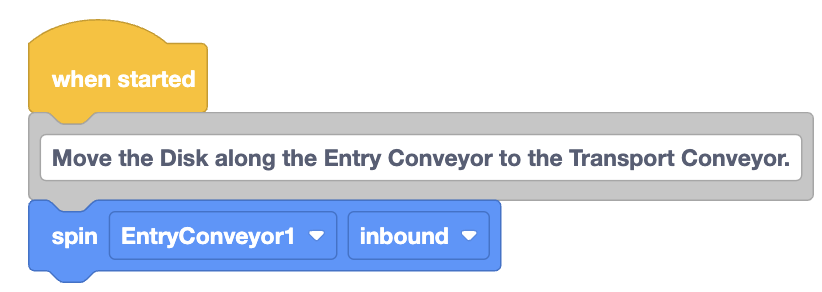
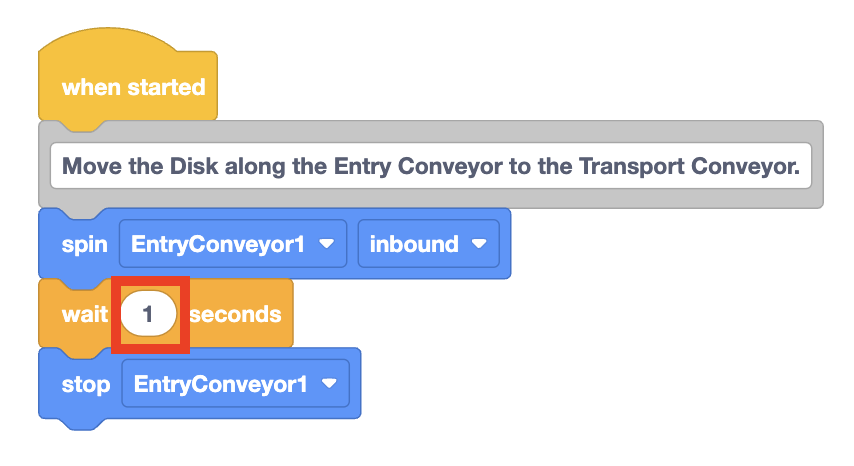
ആദ്യത്തെ കമന്റ്താഴെ ഒരു സ്പിൻബ്ലോക്ക് ഘടിപ്പിക്കുക.
എൻട്രി കൺവെയറിൽ നിന്നും ട്രാൻസ്പോർട്ട് കൺവെയറിന്റെ ദിശയിലേക്കും ഡിസ്ക് ആരംഭിക്കുന്നു, അതിനാൽ പാരാമീറ്ററുകൾ 'EntryConveyor1' ഉം 'ഇൻബൗണ്ട്' ഉം ആയി സജ്ജമാക്കിയിരിക്കാം.
മോട്ടോർ നിർത്താൻ പറയുന്നതുവരെസ്പിൻബ്ലോക്ക് മോട്ടോർ എന്നെന്നേക്കുമായി കറക്കിക്കൊണ്ടേയിരിക്കും.
അടുത്തതായി, ഒരു വെയ്റ്റ് ബ്ലോക്ക് അറ്റാച്ചുചെയ്യുക.
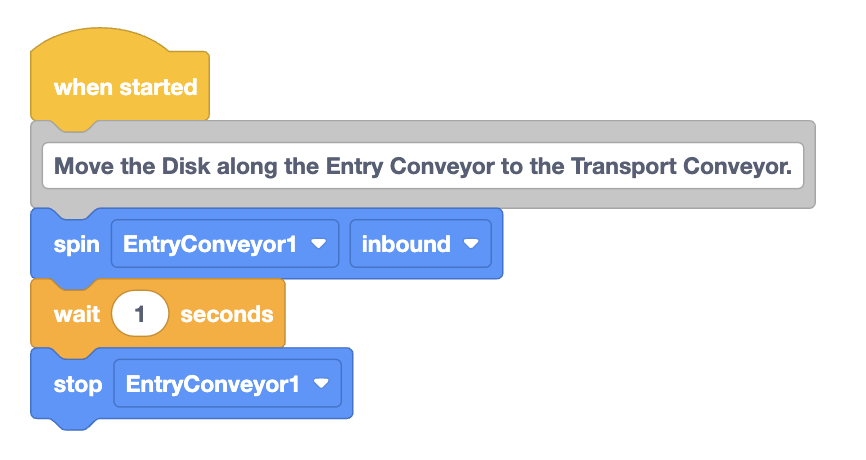
ബ്ലോക്കുകളുടെ സ്റ്റാക്കിന്റെ അടിയിൽ ഒരു സ്റ്റോപ്പ് മോട്ടോർബ്ലോക്ക് ഘടിപ്പിക്കുക. പാരാമീറ്റർ 'EntryConveyor1' ആയി സജ്ജീകരിച്ചിട്ടുണ്ടെന്ന് ഉറപ്പാക്കുക.
പദ്ധതി നടപ്പിലാക്കുമ്പോൾ എന്ത് സംഭവിക്കുമെന്ന് നിങ്ങൾ കരുതുന്നുവെന്ന് ഒരു പ്രവചനം നടത്തുക. നിങ്ങളുടെ എഞ്ചിനീയറിംഗ് നോട്ട്ബുക്കിൽ അത് രേഖപ്പെടുത്തുക.
ബ്രെയിൻ VEXcode-ലേക്ക് ബന്ധിപ്പിച്ചിട്ടുണ്ടെന്ന് ഉറപ്പാക്കുക, തുടർന്ന് പ്രോജക്റ്റ് ബ്രെയിനിലേക്ക് ഡൗൺലോഡ് ചെയ്യുക.
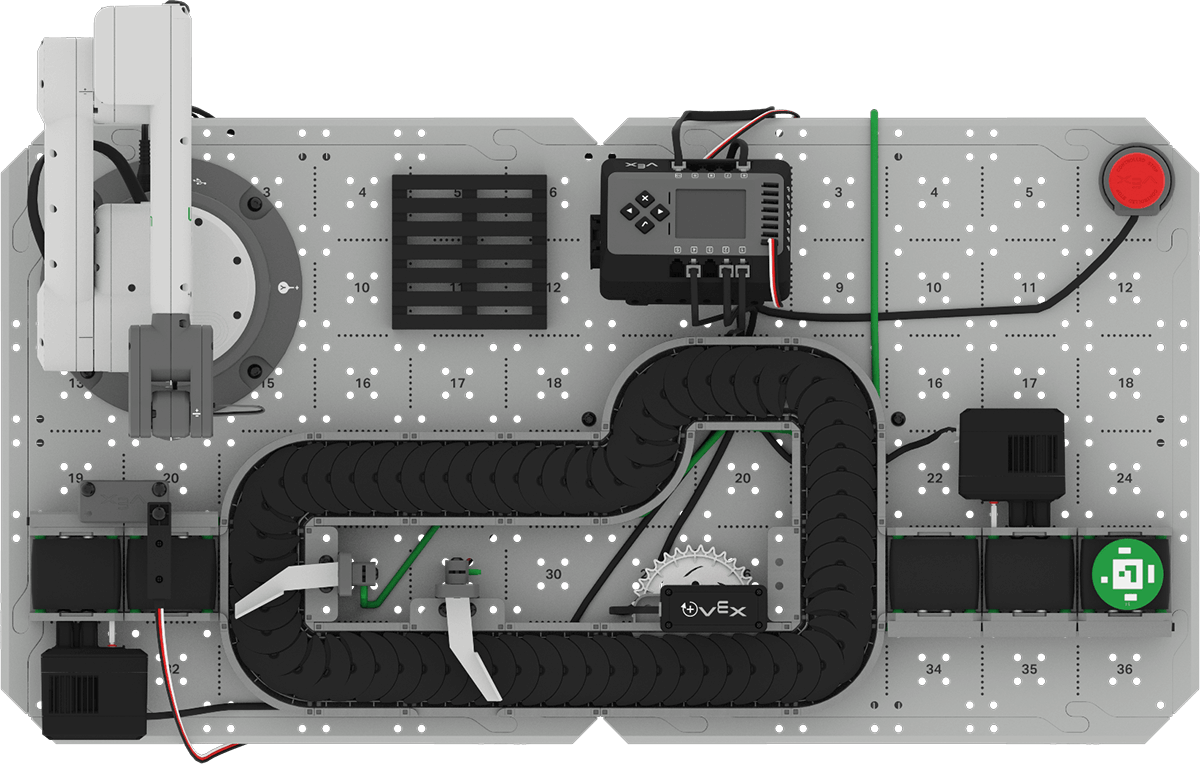
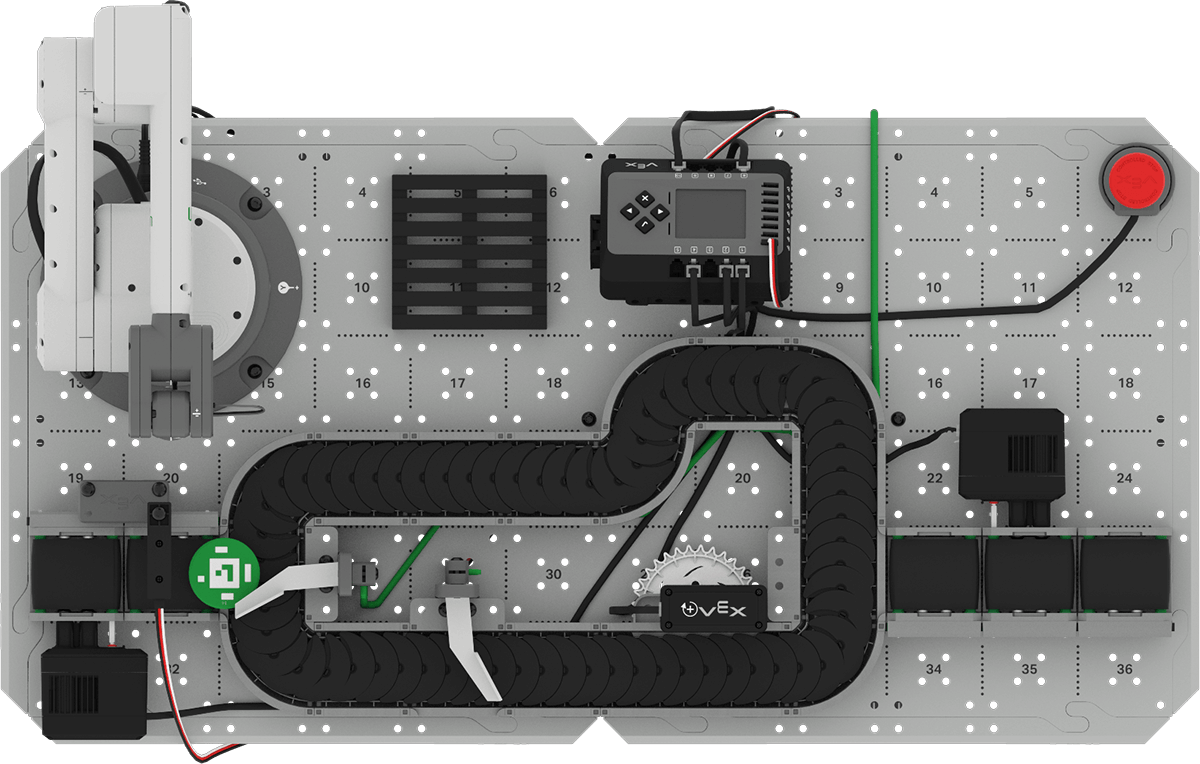
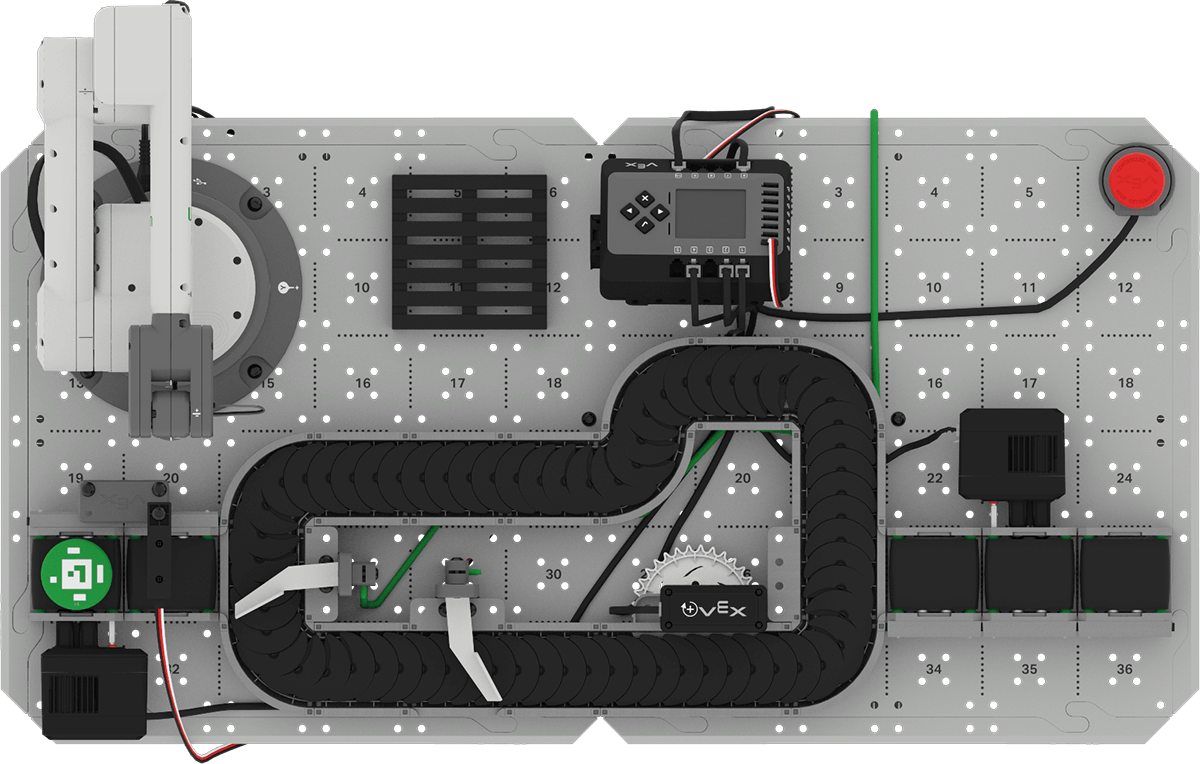
ഇവിടെ കാണിച്ചിരിക്കുന്നതുപോലെ, എൻട്രി കൺവെയറിന്റെ തുടക്കത്തിൽ ഒരു പച്ച ഡിസ്ക് സ്ഥാപിച്ചിട്ടുണ്ടെന്ന് ഉറപ്പാക്കുക. പ്രോജക്റ്റ് പരീക്ഷിച്ചു നോക്കുന്നതിനായി അത് പ്രവർത്തിപ്പിക്കുന്നതിന് തലച്ചോറിലെ ചെക്ക് ബട്ടൺ അമർത്തുക.
കൺവെയറിന്റെ പെരുമാറ്റരീതികൾ നിരീക്ഷിക്കുക. ഇത് ഡിസ്ക് എൻട്രി കൺവെയറിന്റെ അവസാനം വരെ കൊണ്ടുപോകുമോ? എന്തുകൊണ്ട് അല്ലെങ്കിൽ എന്തുകൊണ്ട്?
കൺവെയർ നീങ്ങുന്നത് നിർത്തിയ ശേഷം, പ്രോജക്റ്റ് നിർത്താൻ തലച്ചോറിലെ X ബട്ടൺ അമർത്തുക. നിങ്ങളുടെ എഞ്ചിനീയറിംഗ് നോട്ട്ബുക്കിൽ നിരീക്ഷണങ്ങൾ രേഖപ്പെടുത്തുക.

കൺവെയറിന്റെ സമയം ക്രമീകരിക്കൽ
നിങ്ങളുടെ പ്രോജക്റ്റ് പ്രവർത്തിപ്പിച്ചപ്പോൾ, എൻട്രി കൺവെയർ ഡിസ്ക് ട്രാൻസ്പോർട്ട് കൺവെയറിലേക്ക് പൂർണ്ണമായും നീക്കിയിട്ടില്ലെന്ന് നിങ്ങൾ ശ്രദ്ധിച്ചിരിക്കാം. കാരണം, വെയ്റ്റ് ബ്ലോക്കിലെ പാരാമീറ്റർ 1 സെക്കൻഡ് മാത്രമേ സജ്ജീകരിച്ചിട്ടുള്ളൂ. സ്റ്റോപ്പ് മോട്ടോർബ്ലോക്ക് പ്രവർത്തിപ്പിക്കുന്നതിന് മുമ്പ്, എൻട്രി കൺവെയർ കറങ്ങാൻ കൂടുതൽ സമയം ആവശ്യമാണ്.
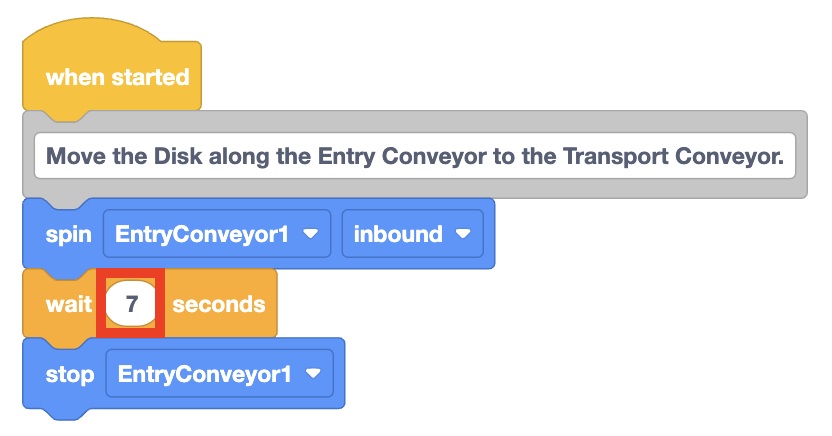
സമയാധിഷ്ഠിത ചലനങ്ങൾ ഉപയോഗിച്ച് നിങ്ങൾ ഒരു പ്രോജക്റ്റ് നിർമ്മിക്കുകയും പരീക്ഷിക്കുകയും ചെയ്യുമ്പോൾ, ശരിയായ സമയം നേടുന്നതിന് വെയ്റ്റ് ബ്ലോക്കിലെ പാരാമീറ്റർ ഒന്നിലധികം തവണ ക്രമീകരിക്കേണ്ടി വന്നേക്കാം.
വെയ്റ്റ് ബ്ലോക്കിലെ പാരാമീറ്റർ 7 സെക്കൻഡായി ക്രമീകരിക്കുക, തുടർന്ന് പ്രോജക്റ്റ് ഡൗൺലോഡ് ചെയ്ത് വീണ്ടും പ്രവർത്തിപ്പിക്കുക.
ട്രാൻസ്പോർട്ട് കൺവെയറിന് ഡിസ്ക് എടുക്കാൻ കഴിയുന്ന അവസാനം വരെ എൻട്രി കൺവെയർ ഡിസ്ക് എത്തിച്ചിരുന്നോ? ഇല്ലെങ്കിൽ, അത് സംഭവിക്കുന്നത് വരെ പാരാമീറ്റർ വീണ്ടും ക്രമീകരിക്കുക.
കുറിപ്പ്:പാരാമീറ്ററിൽ ആവശ്യമായ സെക്കൻഡുകളുടെ എണ്ണം വ്യത്യാസപ്പെടാം. നിങ്ങളുടെ CTE വർക്ക്സെൽ ബേസിന് വിശ്വസനീയമായി പ്രവർത്തിക്കുന്ന നമ്പറുകൾ ഉപയോഗിക്കുക.
ട്രാൻസ്പോർട്ട് കൺവെയറിനൊപ്പം ഡിസ്ക് നീക്കാൻ ആവശ്യമായ ബ്ലോക്കുകൾ ചേർക്കുക.
'TransportConveyor2' ഉം 'forward' ഉം ആയി പാരാമീറ്ററുകൾ സജ്ജീകരിച്ചിരിക്കുന്നതിനാൽ, ഇവ എൻട്രി കൺവെയറിനായി ഉപയോഗിക്കുന്ന അതേ ബ്ലോക്കുകളാണെന്ന് ശ്രദ്ധിക്കുക.
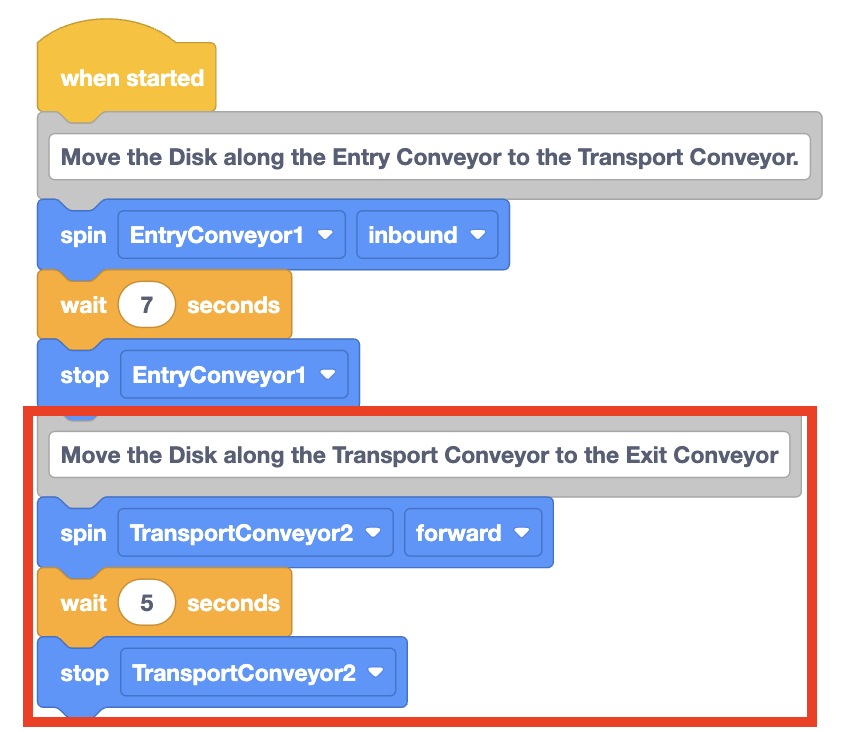
പ്രോജക്റ്റ് തലച്ചോറിലേക്ക് ഡൗൺലോഡ് ചെയ്യുക, തുടർന്ന് പരീക്ഷിക്കാൻ അത് പ്രവർത്തിപ്പിക്കുക. ട്രാൻസ്പോർട്ട് കൺവെയറിന്റെ നീളത്തിൽ ഡിസ്ക് സഞ്ചരിച്ച് ഡൈവേർട്ടറിൽ നിർത്തുന്നുണ്ടോ? ഇല്ലെങ്കിൽ, Waitബ്ലോക്കിന്റെ പാരാമീറ്റർ അത് ചെയ്യുന്നതുവരെ ക്രമീകരിക്കുക.
നിങ്ങളുടെ അറിവിലേക്കായി
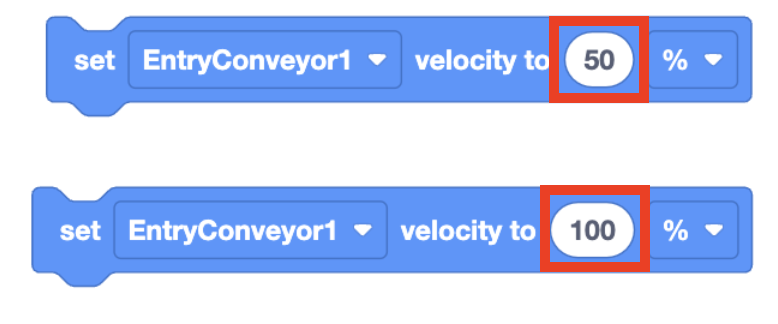
സെറ്റ് മോട്ടോർ പ്രവേഗം ബ്ലോക്ക് ഉപയോഗിച്ച് ഒരു കൺവെയറിലൂടെ വസ്തുക്കൾ സഞ്ചരിക്കുന്ന വേഗതയിൽ മാറ്റം വരുത്താവുന്നതാണ്. കൺവെയർ കൂടുതൽ വേഗത്തിലോ സാവധാനത്തിലോ കറങ്ങുന്നതിന് ബ്ലോക്കിലെ പാരാമീറ്റർ മാറ്റാൻ കഴിയും. ഡിഫോൾട്ട് കൺവെയർ പ്രവേഗം 50% ആണ്, പരമാവധി പ്രവേഗം 100% ആണ്.
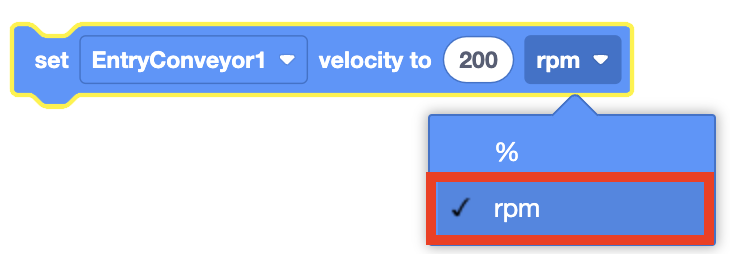
സെറ്റ് മോട്ടോർ പ്രവേഗം ബ്ലോക്ക് പാരാമീറ്റർ rpm-കൾ അല്ലെങ്കിൽ മിനിറ്റിലെ ഭ്രമണങ്ങൾ ഉപയോഗിച്ച് സജ്ജമാക്കാനും കഴിയും.
പ്രവർത്തനം
എൻട്രി കൺവെയറിൽ നിന്ന് ട്രാൻസ്പോർട്ട് കൺവെയറിലൂടെ എക്സിറ്റ് കൺവെയറിലേക്ക് ഒരു ഡിസ്ക് നീക്കുന്നതിന് കൺവെയറുകൾ കോഡ് ചെയ്യുന്നതിന് നിങ്ങൾ ഇപ്പോൾ സമയാധിഷ്ഠിത ചലനങ്ങൾ ഉപയോഗിച്ചുകഴിഞ്ഞു, കൺവെയറിന്റെ അറ്റത്ത് നിന്ന് വീഴാതെ ഡിസ്ക് എക്സിറ്റ് കൺവെയറിന്റെ അറ്റത്തേക്ക് നീക്കുന്നതിനുള്ള നിങ്ങളുടെ പ്രോജക്റ്റിലേക്ക് നിങ്ങൾ വികസിപ്പിക്കും.
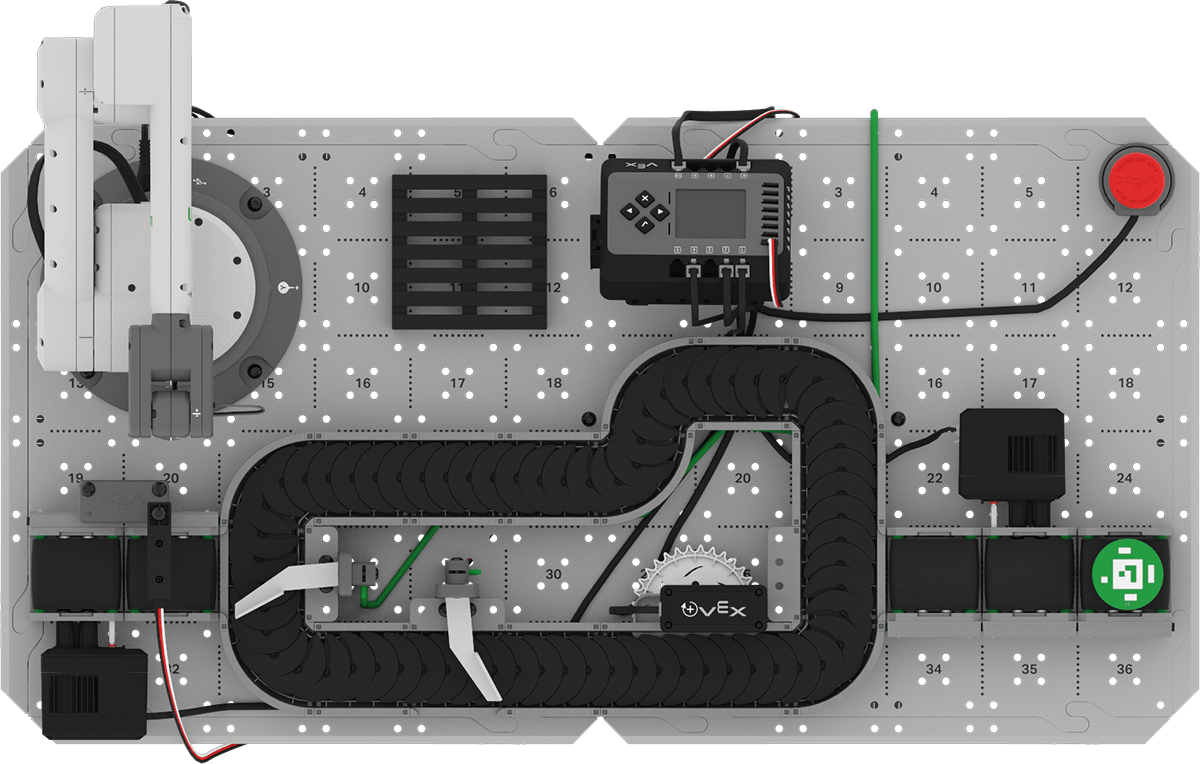
സജ്ജീകരണം:താഴെ കാണിച്ചിരിക്കുന്നതുപോലെ എൻട്രി കൺവെയറിന്റെ തുടക്കത്തിൽ ഒരു ഡിസ്ക് സ്ഥാപിക്കുക.
പ്രവർത്തനം: എൻട്രി കൺവെയറിൽ നിന്ന് ട്രാൻസ്പോർട്ട് കൺവെയറിലൂടെ എക്സിറ്റ് കൺവെയറിന്റെ അവസാനം വരെ ഒരു ഡിസ്ക് കൊണ്ടുപോകുന്ന ഒരു VEXcode പ്രോജക്റ്റ് സൃഷ്ടിക്കുക.
- എക്സിറ്റ് കൺവെയറിന്റെ അവസാനഭാഗത്തേക്ക് ഡിസ്ക് നീക്കുന്നതിന് നിങ്ങളുടെ പ്രോജക്റ്റിൽ എങ്ങനെ നിർമ്മിക്കുമെന്ന് ആസൂത്രണം ചെയ്യുക.
- നിങ്ങളുടെ എഞ്ചിനീയറിംഗ് നോട്ട്ബുക്കിൽ പ്ലാൻ രേഖപ്പെടുത്തുക.
- നിങ്ങളുടെ പ്രോജക്റ്റ് ന്റെ പേര് മാറ്റുക യൂണിറ്റ് 4 പാഠം 2 ആക്റ്റിവിറ്റി പ്രോജക്റ്റ് എഡിറ്റ് ചെയ്യാൻ തുടങ്ങുന്നതിനുമുമ്പ് അത് നിങ്ങളുടെ ഉപകരണത്തിൽ സേവ് ചെയ്യുക.
- നിങ്ങളുടെ ഗ്രൂപ്പ് അംഗീകരിച്ച പ്ലാനുമായി പൊരുത്തപ്പെടുന്നതിന് VEXcode-ൽ പ്രോജക്റ്റ് എഡിറ്റ് ചെയ്യുക.
- എൻട്രി കൺവെയർ സ്റ്റാർട്ടിംഗ് പോയിന്റിൽ ഒരു ഡിസ്ക് സ്ഥാപിച്ച് പ്രോജക്റ്റ് പ്രവർത്തിപ്പിക്കുക. കൺവെയറുകൾ ഡിസ്ക് എക്സിറ്റ് കൺവെയറിന്റെ അറ്റത്തേക്ക് വീഴാതെ നീക്കുന്നുണ്ടോ? കൺവെയറുകൾ നീങ്ങിക്കഴിഞ്ഞാൽ പ്രോജക്റ്റ് നിർത്തുക, നിങ്ങളുടെ നിരീക്ഷണങ്ങൾ എഞ്ചിനീയറിംഗ് നോട്ട്ബുക്കിൽ രേഖപ്പെടുത്തുക.
- എക്സിറ്റ് കൺവെയറിന്റെ അറ്റത്ത് നിന്ന് ഡിസ്ക് വീഴുകയാണെങ്കിൽ, ഒരു ഡിസ്ക് വീഴാതെ കൺവെയറിന്റെ അറ്റം വരെ സഞ്ചരിക്കുന്നതുവരെ നിങ്ങളുടെ പ്രോജക്റ്റ് എഡിറ്റ് ചെയ്യുക. നിങ്ങളുടെ എഞ്ചിനീയറിംഗ് നോട്ട്ബുക്കിൽ എന്തെങ്കിലും മാറ്റങ്ങൾ രേഖപ്പെടുത്തുക.
നിങ്ങളുടെ ധാരണ പരിശോധിക്കുക
അടുത്ത പാഠത്തിലേക്ക് കടക്കുന്നതിനു മുമ്പ്, നിങ്ങളുടെ എഞ്ചിനീയറിംഗ് നോട്ട്ബുക്കിൽ താഴെ പറയുന്ന ചോദ്യങ്ങൾക്ക് ഉത്തരം നൽകി ഈ പാഠത്തിലെ ആശയങ്ങൾ മനസ്സിലാക്കിയിട്ടുണ്ടെന്ന് ഉറപ്പാക്കുക.
നിങ്ങളുടെ ധാരണാ ചോദ്യങ്ങൾ പരിശോധിക്കുക > (Google Doc / .docx / .pdf)
മിഡ് യൂണിറ്റ് റിഫ്ലക്ഷനിലേക്ക് നീങ്ങാൻ അടുത്തത് > തിരഞ്ഞെടുക്കുക.