
Lezione 2: Codifica dei trasportatori
In precedenza abbiamo parlato di trasportatori e deviatori e di come questi consentano un trasporto efficiente dei materiali in contesti industriali. Hai anche imparato come funzionano i trasportatori della CTE Workcell. Ora sei pronto per iniziare a codificare i trasportatori per il trasporto dei dischi. In questa lezione imparerai:
- Come configurare i singoli motori del trasportatore in VEXcode.
- Come creare un progetto VEXcode per spostare i dischi da un trasportatore all'altro utilizzando movimenti basati sul tempo.
Alla fine di questa lezione sarai in grado di realizzare un progetto per trasportare un disco dal trasportatore di entrata, attraverso il trasportatore di trasporto, fino al trasportatore di uscita.
Prepararsi a codificare i trasportatori
Prima di poter codificare i trasportatori sulla CTE Workcell, è necessario completare alcune attività importanti per prepararsi. Sarà necessario configurare ogni singolo motore del trasportatore in VEXcode. Sarà inoltre necessario modificare la pila di blocchi che avviano un arresto controllato, per assicurarsi che siano inclusi tutti i motori del trasportatore.
Configurazione dei singoli motori in VEXcode
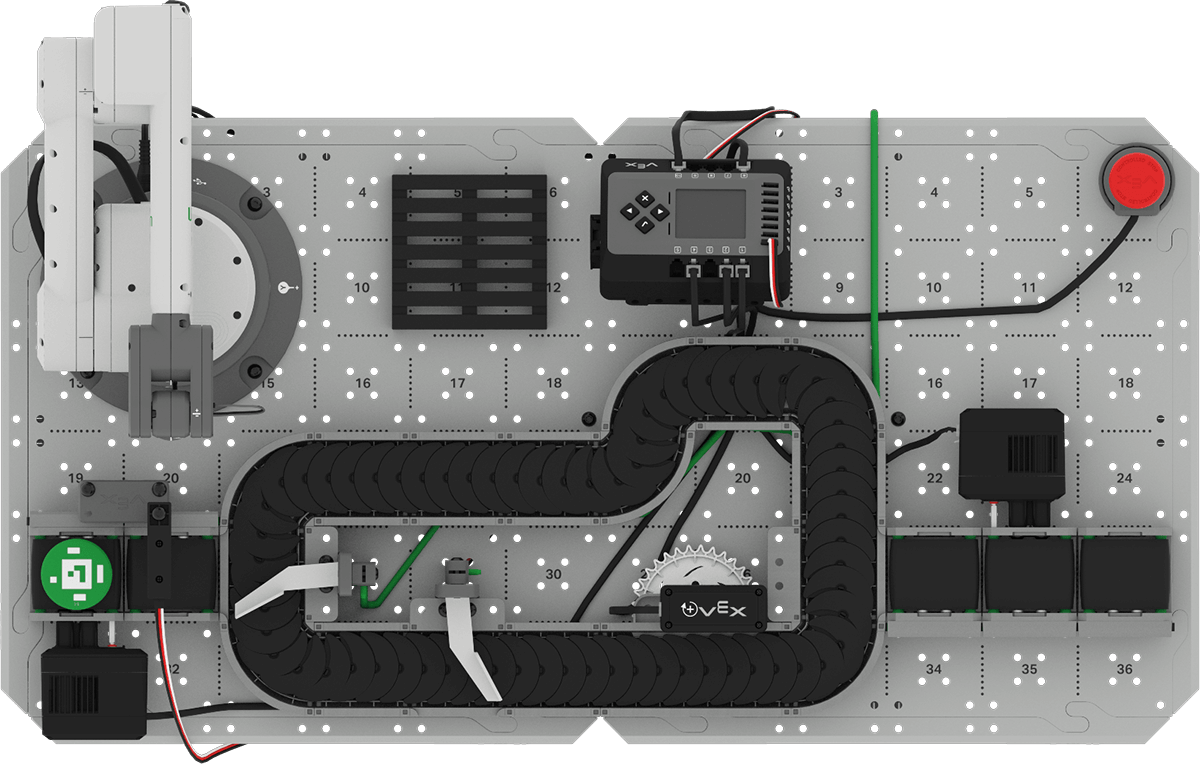
Ogni trasportatore della CTE Workcell è controllato da un motore separato. Per questo motivo, prima di poter iniziare il progetto sarà necessario aggiungere ciascun motore alla configurazione in VEXcode. Inoltre, dovrai assicurarti che ogni motore abbia il nome corretto e che sia impostato per girare nella direzione necessaria per trasportare correttamente i materiali.
Configurazione del motore del trasportatore di ingresso
Aprire il progetto Brain CTE 6-Axis Arm Base Template.
Nota:Per un promemoria su come aprire gli esempi in VEXcode EXP, fare riferimento all'unità precedente.

Rinomina il progetto in Unità 4 Lezione 2e salvalo sul tuo dispositivo.

Aprire la finestra Dispositivi.

Seleziona Aggiungi un dispositivo.

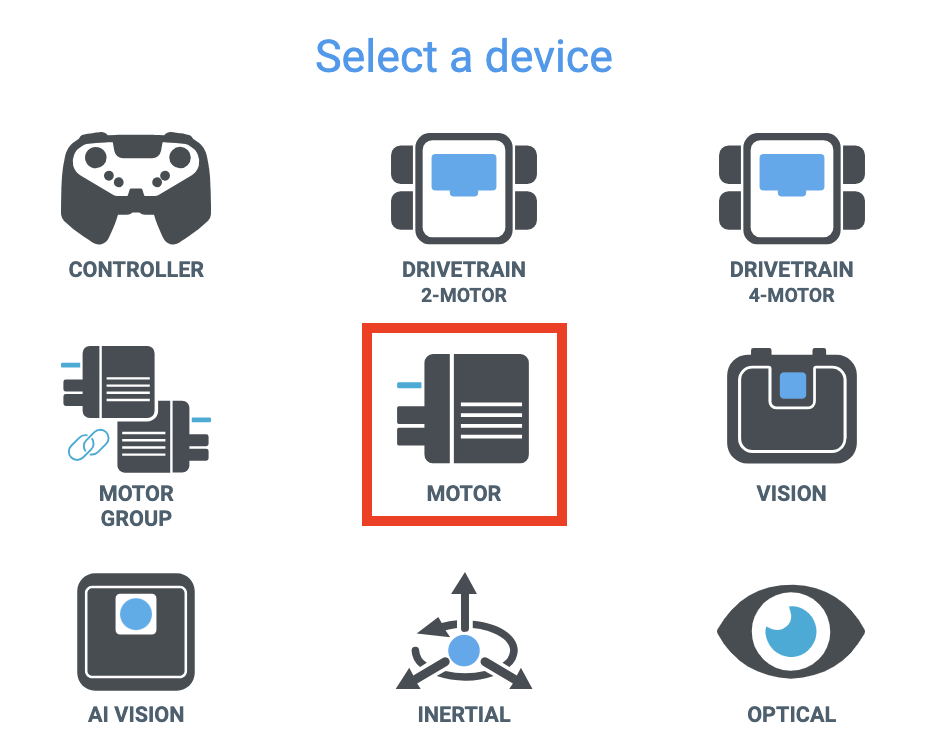
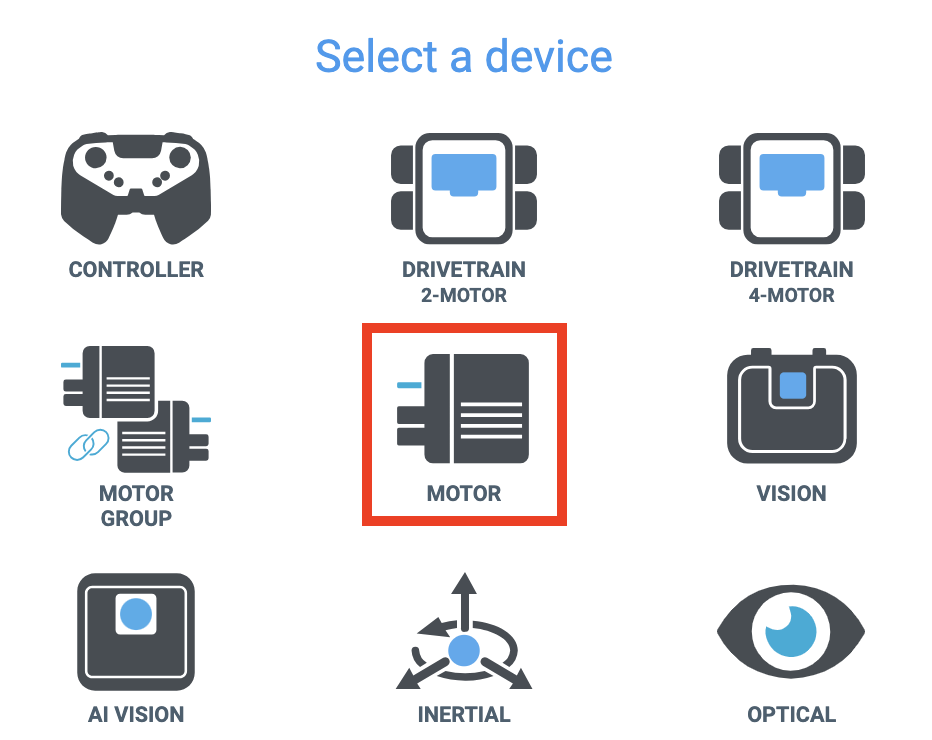
Selezionare Motore dall'elenco dei Dispositivi.
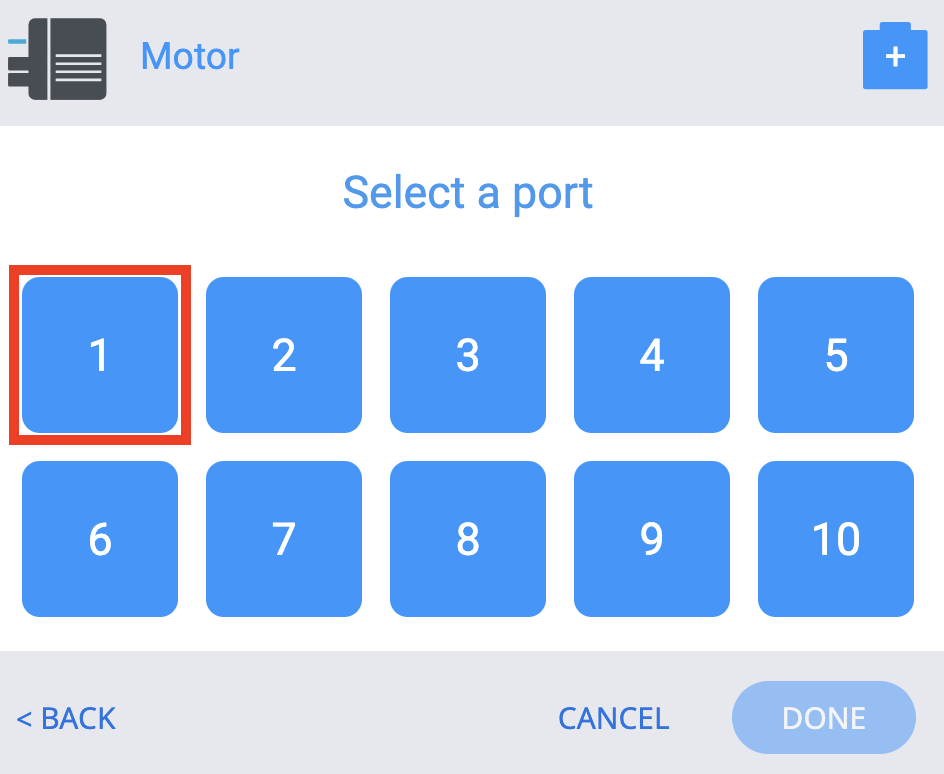
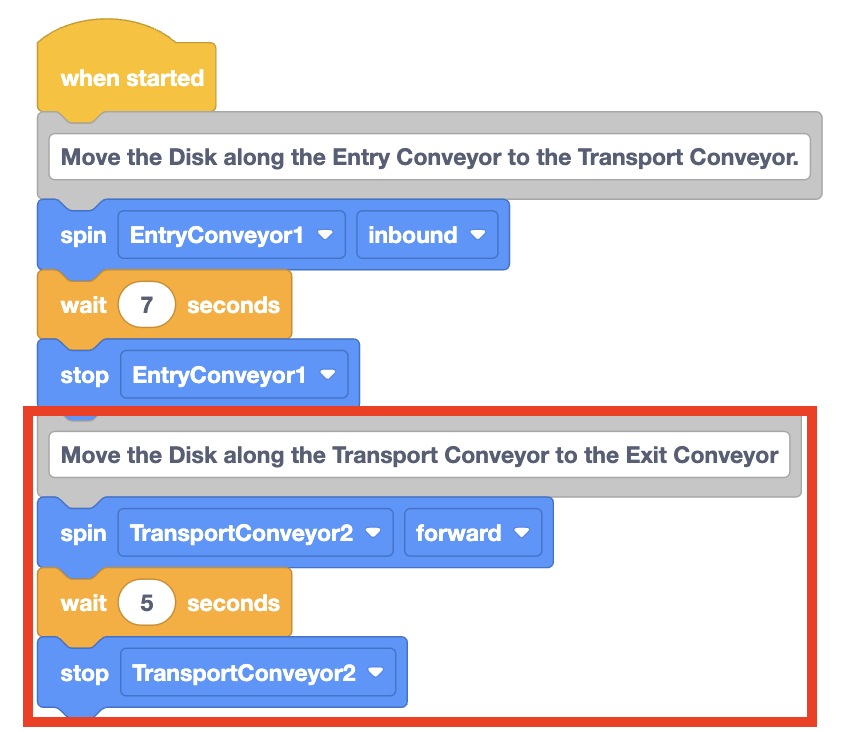
Selezionare la porta 1 sul Brain in modo che corrisponda alla porta a cui è collegato il motore del trasportatore di ingresso.
Nota:Assicurarsi che il motore del trasportatore di ingresso sia collegato alla porta 1 del Brain.
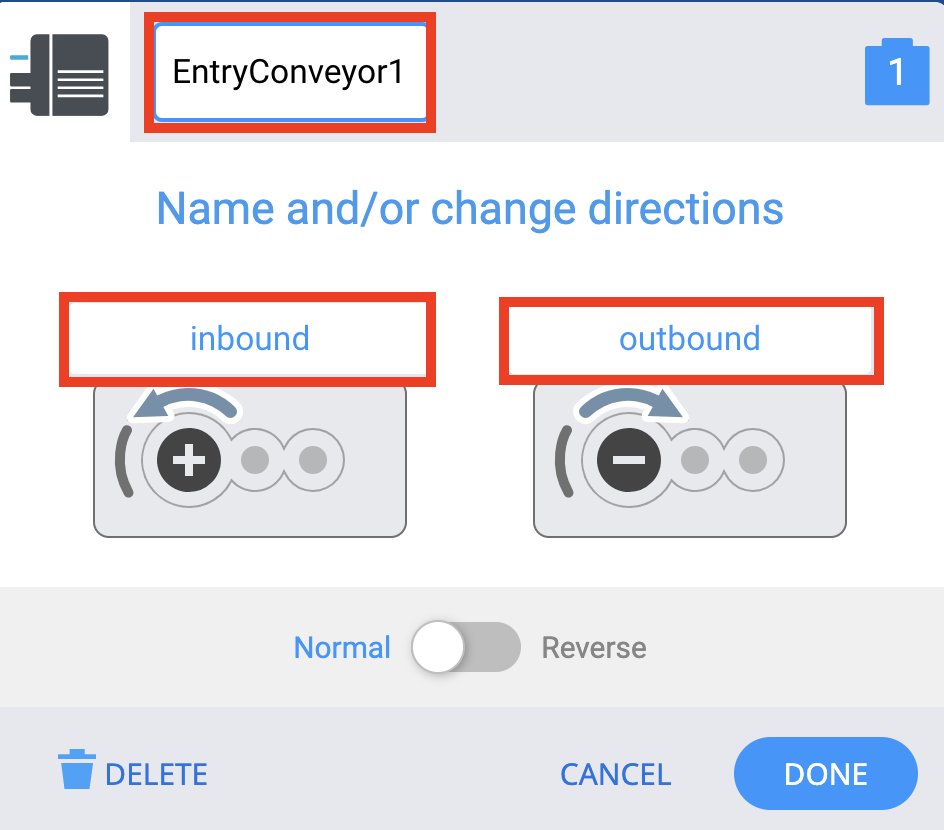
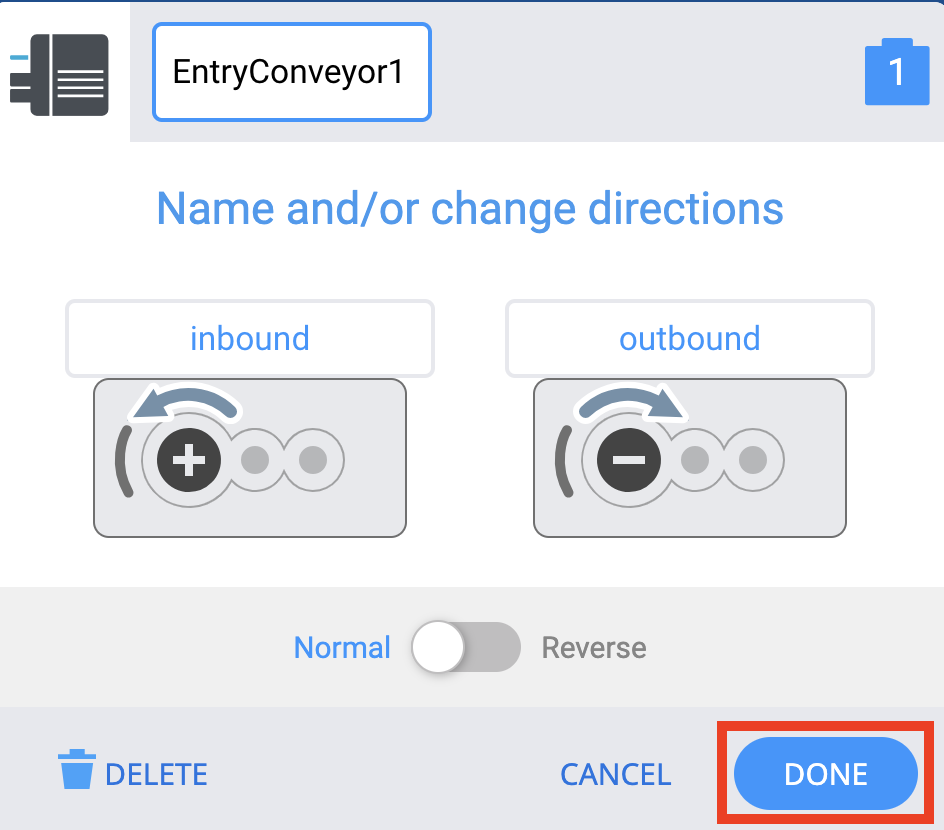
Modifica le etichette in modo che corrispondano a questa immagine.
- Il motore dovrebbe essere rinominato per identificarlo chiaramente come motore del trasportatore di ingresso. Il numero nel nome fa riferimento alla porta a cui è collegato.
- Anche le direzioni del motore dovrebbero essere rinominate in inbound e outbound, poiché le etichette predefinite forward e reversenon descrivono adeguatamente il movimento dei trasportatori.
In entrata significa che il trasportatore di ingresso sta ruotando verso verso il trasportatore di trasporto. In uscitasignifica che il trasportatore di ingresso si sta allontanando dal trasportatore di trasporto.
Seleziona Fatto.
Configurazione del motore del trasportatore di uscita
Il motore del trasportatore di uscita può essere configurato nello stesso modo del motore del trasportatore di entrata.
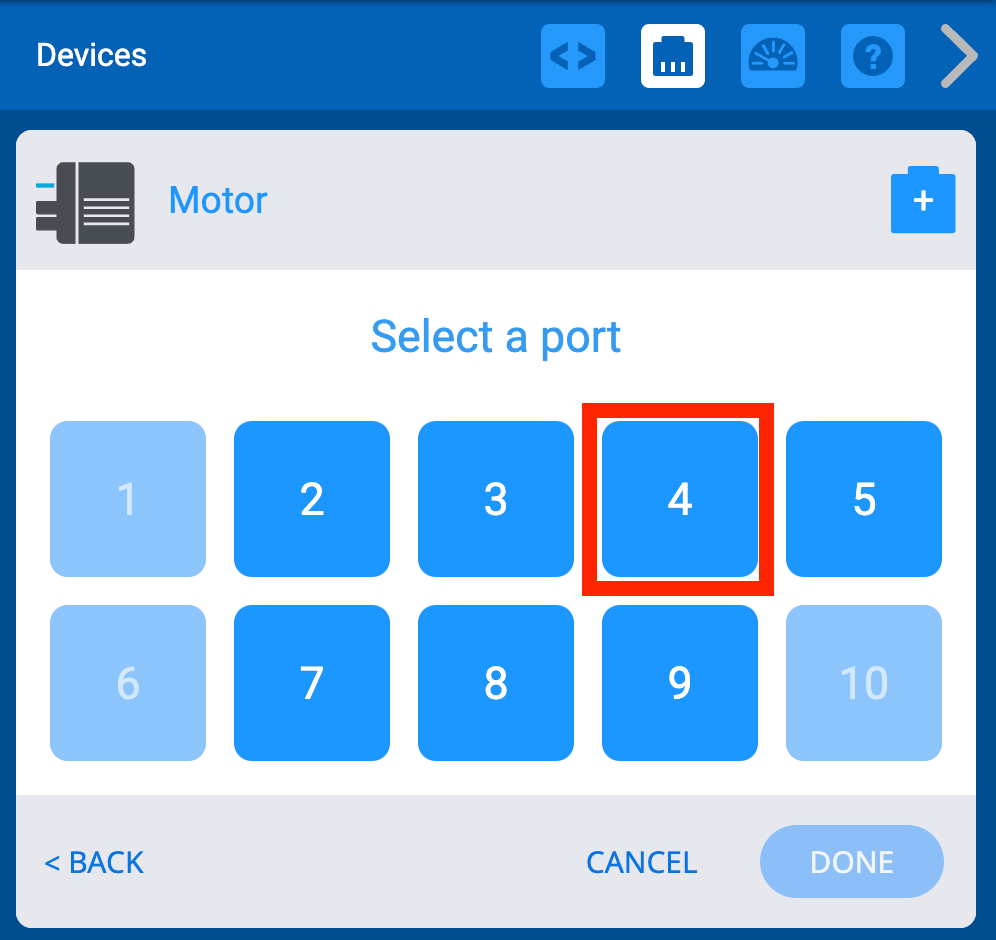
Nella finestra Dispositivi, selezionare Motore dall'elenco dei dispositivi.

Selezionare la porta 4 in modo che corrisponda alla porta a cui è collegato il motore del trasportatore di uscita.
Nota:Assicurarsi che il motore del trasportatore di uscita sia collegato alla porta 4 del Brain.
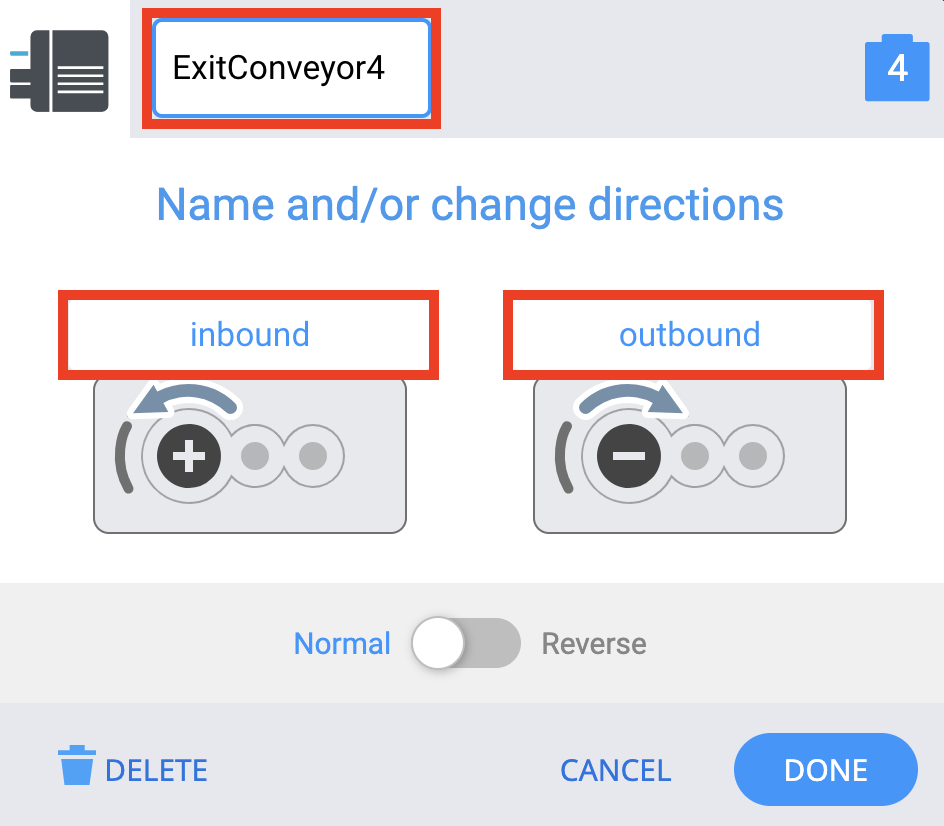
Modifica le etichette in modo che corrispondano a quelle nell'immagine.
- Il motore dovrebbe essere rinominato per identificarlo chiaramente come motore del trasportatore di uscita. Il numero nel nome fa riferimento alla porta a cui è collegato.
- Anche le direzioni del motore dovrebbero essere rinominate inin entrata,ein uscita,come fatto in precedenza per il trasportatore di ingresso.
In entratasignifica che il trasportatore di uscita sta ruotandoaverso il trasportatore di trasporto. In uscitasignifica che il trasportatore di uscita si sta allontanando dal trasportatore di trasporto.
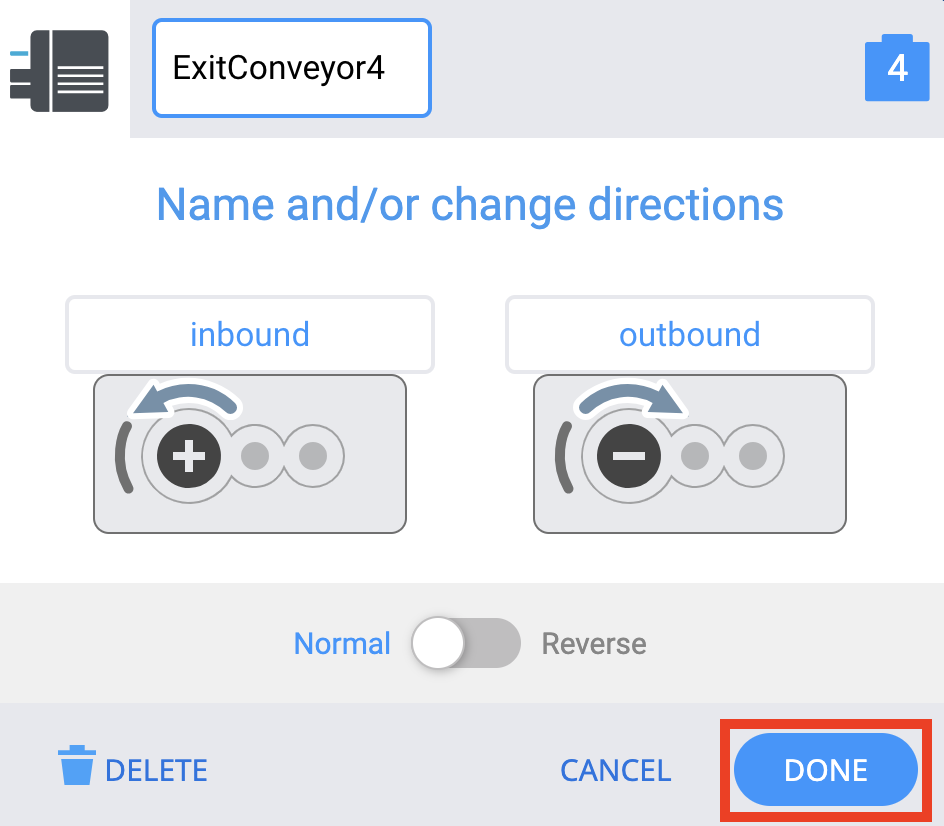
Seleziona Fatto.
Configurazione del motore del trasportatore di trasporto
Infine, sarà necessario configurare il motore del trasportatore. Inoltre, sarà necessario invertire la direzione del motore affinché il trasportatore si muova nella direzione desiderata.
Nella finestra Dispositivi, selezionare Motore dall'elenco Dispositivi.
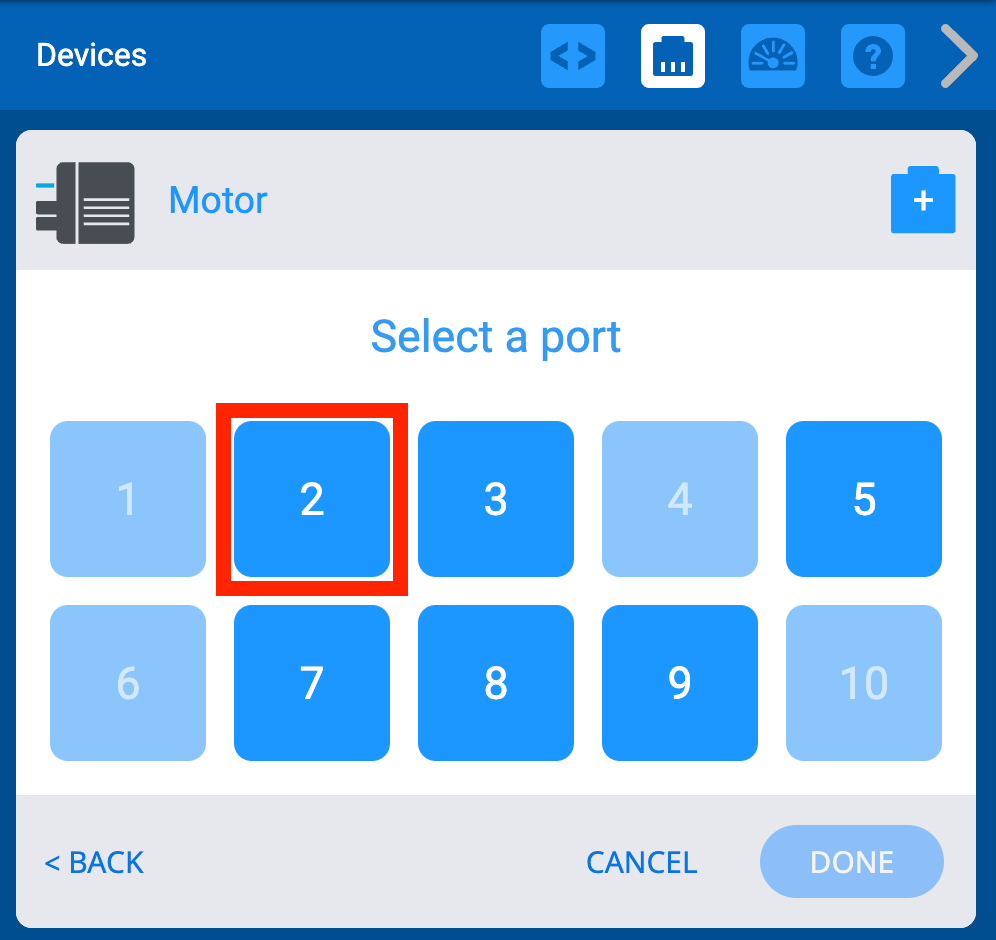
Selezionare la porta 2 in modo che corrisponda alla porta a cui è collegato il motore del trasportatore.
Nota:Assicurarsi che il motore del trasportatore sia collegato alla porta 2 del Brain.
Rinomina il motore in TransportConveyor2.
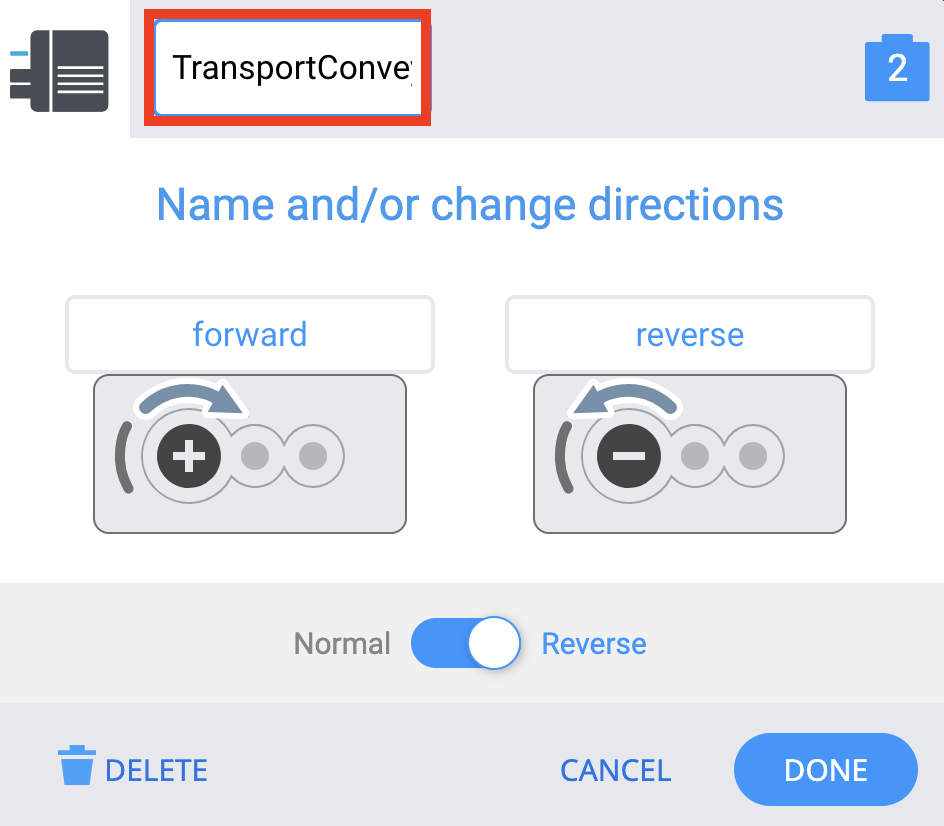
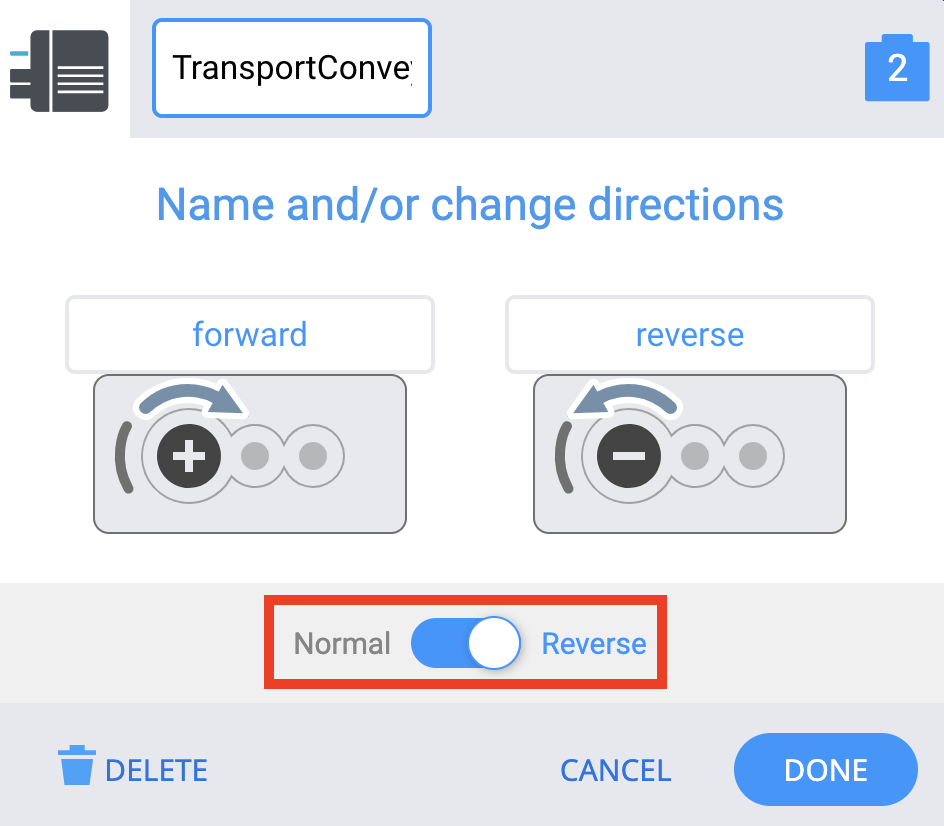
Affinché il trasportatore possa spostare i materiali nella direzione corretta, è necessario selezionare il pulsante di attivazione/disattivazione per modificare la direzione del motore da Normale a Inversa.
Direzione del motore del trasportatore di trasporto
Durante la configurazione del motore del trasportatore, è stato necessario invertirne la direzione. Questo perché per impostazione predefinita il motore fa girare il trasportatore in senso orario. È possibile determinare la direzione di rotazione predefinita di un motore in base all'etichetta del motore.
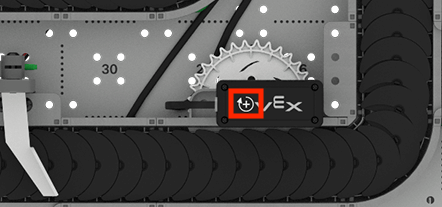
Sulla parte superiore di ogni motore è presente un'icona che indica la direzione positiva. Nel caso del trasportatore, la freccia punta in senso orario. Ciò significa che, per impostazione predefinita, qualsiasi disco posizionato sul trasportatore girerà dal trasportatore di ingresso al primo deviatore. Invertendo la configurazione del motore, si garantisce che la direzione avanticorrisponda a ciò che viene definito il percorso corretto lungo il trasportatore.
Modifica dell'arresto controllato
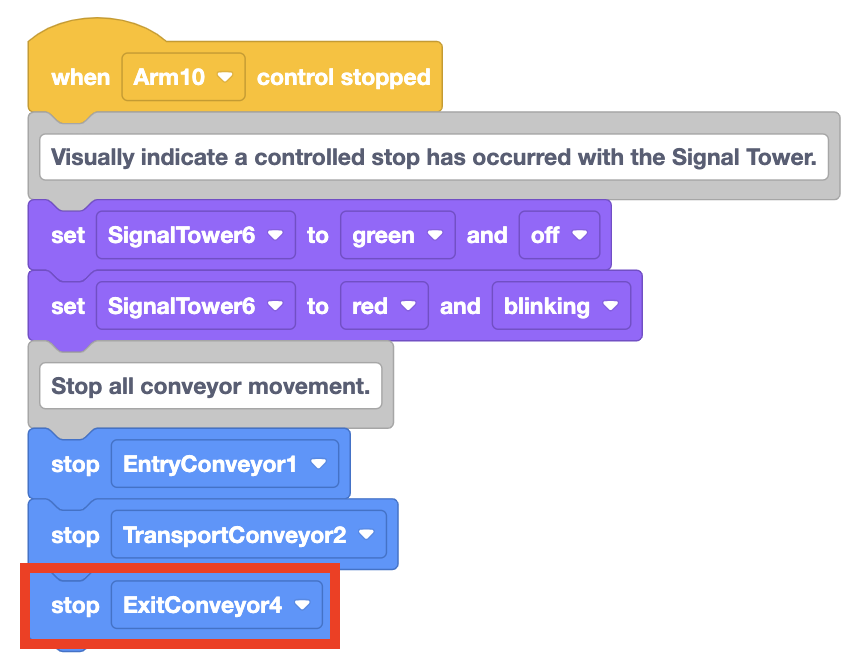
Ora che hai configurato tutti i motori del trasportatore, devi aggiornare l'arresto controllato. Quando viene attivato un arresto controllato, tutti i motori dovrebbero fermarsi, in modo da garantire che la base della cella di lavoro CTE possa essere spostata in sicurezza. Aggiungerai dei blocchi al bloccoQuando controllato fermaper fermare questi motori del trasportatore.
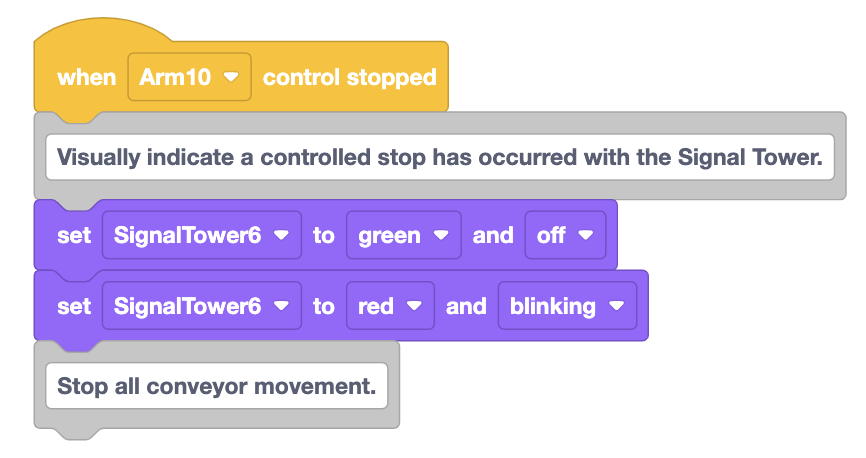
Creare un commento per descrivere i comportamenti del trasportatore necessari durante un arresto controllato.

Aggiungere il bloccoCommento alla pila di blocchi esistente.
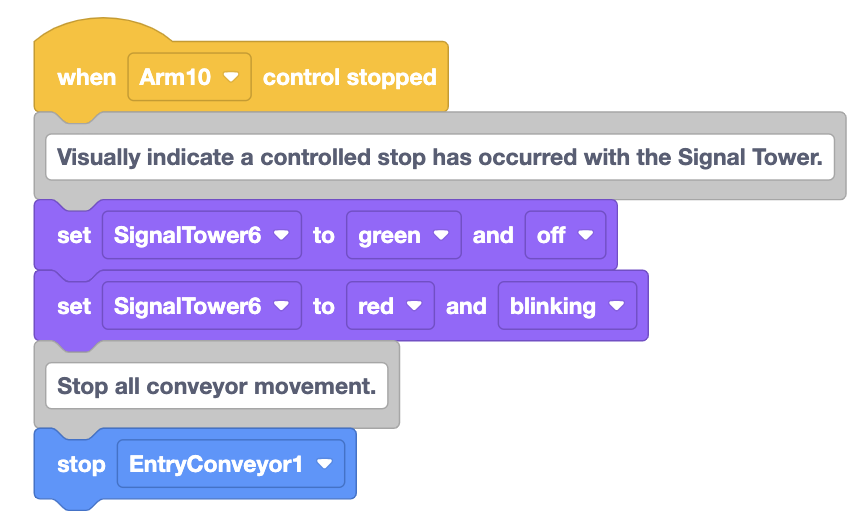
Trascinare un blocco Stop motor per fermare il trasportatore di ingresso e agganciarlo alla pila di blocchi.
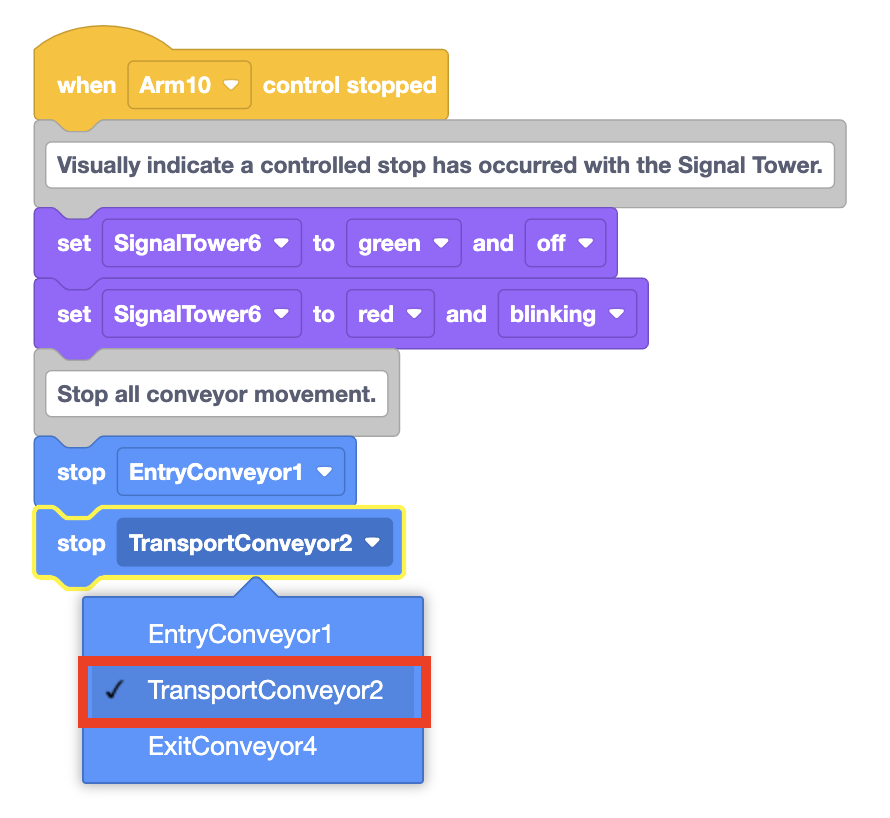
Trascina fuori un altro blocco Stop motor e fissalo in fondo alla pila di blocchi.
Selezionare la freccia per aprire il menu a discesa e selezionare 'TransportConveyor2' per impostare il parametro per arrestare il trasportatore in modo controllato.
Aggiungere un terzo blocco Arresto motore alla pila. Modificare il parametro in 'ExitConveyor4'.
Creazione di un progetto per trasportare un disco utilizzando i trasportatori
Ora che hai configurato i motori del trasportatore e modificato l'arresto controllato, puoi iniziare a realizzare un progetto per trasportare un disco utilizzando i trasportatori. Inizierai a costruire un progetto per far viaggiare il Disco dal trasportatore di ingresso, lungo il trasportatore di trasporto, fino al trasportatore di uscita. Per fare ciò, il movimento del disco lungo i trasportatori deve essere attentamente coordinato. Un modo per ottenere questo coordinamento è creare un progetto utilizzando movimenti basati sul tempo, come mostrato nel video qui sotto.
Movimenti basati sul tempo
Utilizzando una combinazione di blocchi Wait, Spine Stop motor , è possibile creare un progetto in cui ogni trasportatore si avvia e si arresta al momento giusto per trasferire un disco da un trasportatore all'altro. Questo modo di codificare i trasportatori è detto utilizzo di movimenti basati sul tempo.
Costruire il progetto
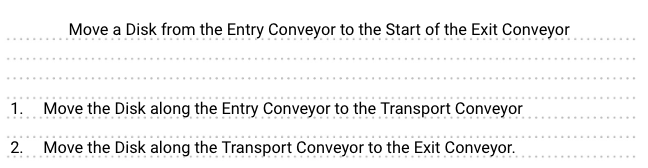
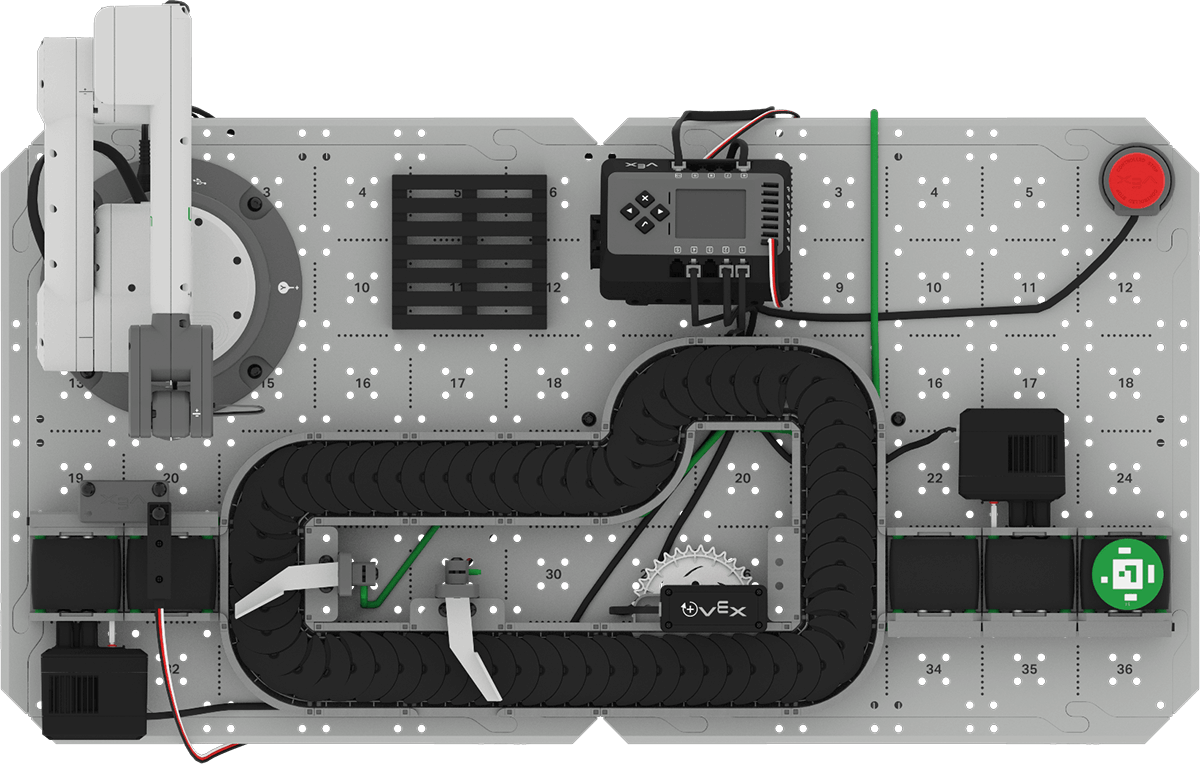
Annota sul tuo quaderno di progettazione i passaggi di pianificazione necessari per spostare il disco, come quelli mostrati nell'immagine qui sotto.
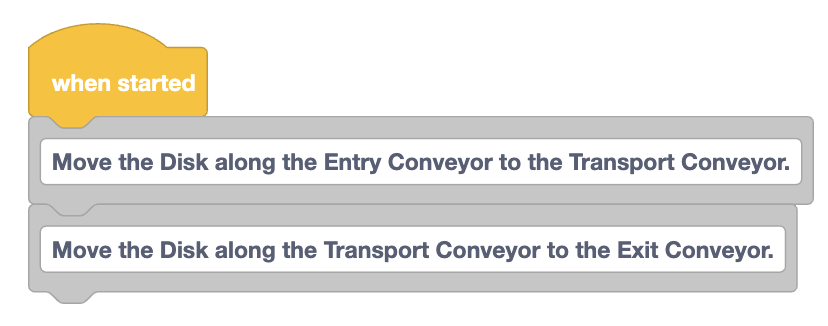
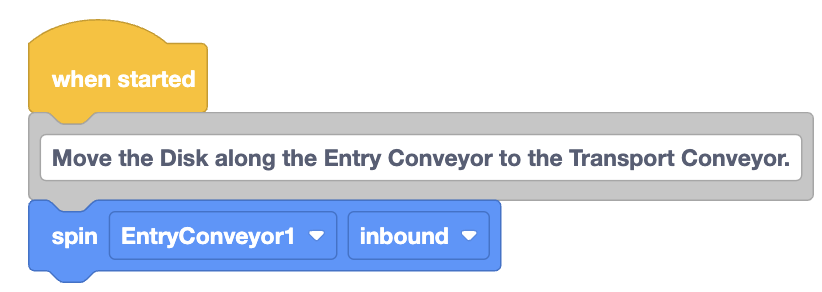
Crea blocchi Commento per ogni fase del tuo piano e allegali al blocco Quando iniziato .
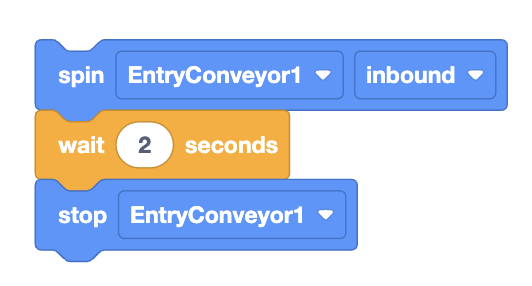
Collega un blocco Spinsotto il primo Commento.
Il disco parte dal trasportatore di ingresso e nella direzione del trasportatore di trasporto, quindi i parametri possono rimanere impostati su "EntryConveyor1" e "in entrata".
Il bloccoSpinfarà girare il motore all'infinito finché non gli verrà detto di fermarlo.
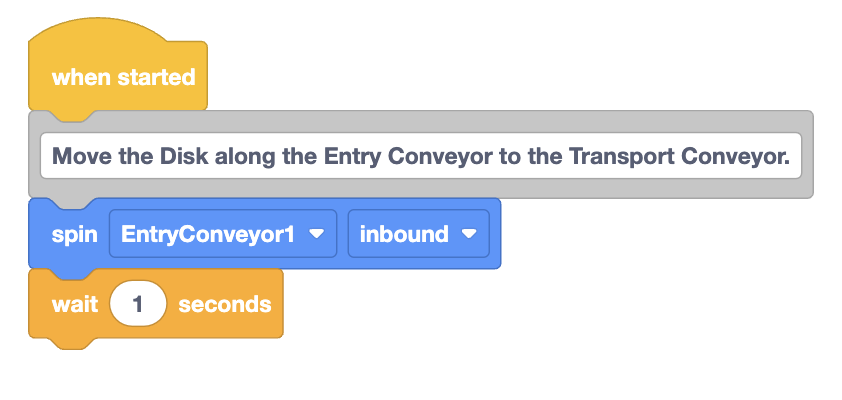
Quindi, collega un blocco Wait.
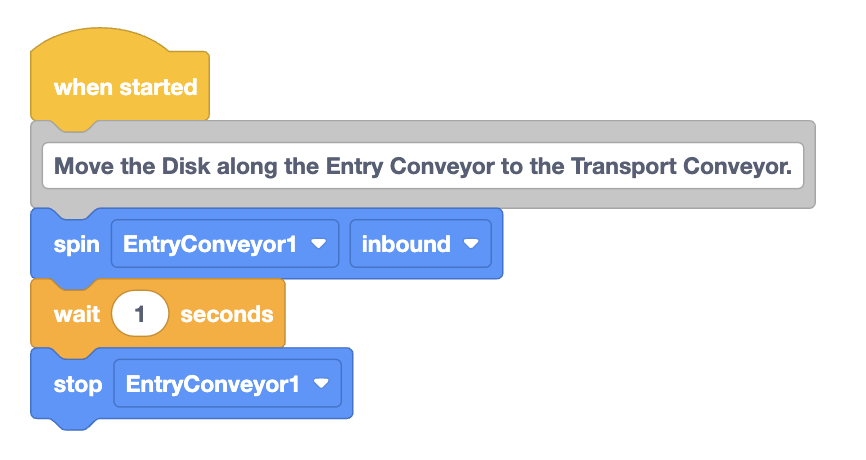
Fissare un blocco Stop motoralla base della pila di blocchi. Assicurarsi che il parametro sia impostato come 'EntryConveyor1'.
Fai una previsione su cosa pensi accadrà una volta completato il progetto. Annotalo sul tuo quaderno di ingegneria.
Assicuratevi che Brain sia connesso a VEXcode e scaricate il progetto su Brain.
Assicuratevi che all'inizio del trasportatore di ingresso sia posizionato un disco verde, come mostrato qui. Premi il pulsante Check sul Brain per eseguire il progetto e testarlo.
Osservare il comportamento del trasportatore. Trasporta il disco fino alla fine del trasportatore di ingresso? Perché sì o perché no?
Quando il trasportatore si è fermato, premere il pulsante X sul Brain per interrompere il progetto. Annota le tue osservazioni sul tuo quaderno di progettazione.

Temporizzazione del trasportatore
Quando hai eseguito il progetto, probabilmente hai notato che il trasportatore di ingresso non ha spostato il disco fino al trasportatore di trasporto. Ciò avviene perché il parametro nel blocco Wait è impostato solo su 1 secondo. È necessario più tempo per far girare il trasportatore di ingresso prima che venga eseguito il blocco Stop Motor.
Quando si realizza e si testa un progetto utilizzando movimenti basati sul tempo, potrebbe essere necessario regolare più volte il parametro nel blocco Wait per ottenere la tempistica corretta.
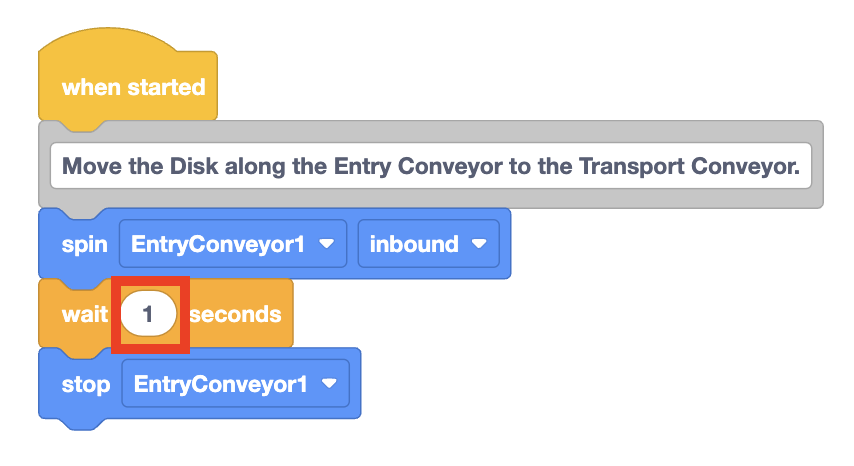
Regolare il parametro nel blocco Wait a 7 secondi, quindi scaricare ed eseguire nuovamente il progetto per testarlo.
Il trasportatore di ingresso ha trasportato il disco fino alla fine, dove è stato prelevato dal trasportatore di trasporto? In caso contrario, regolare nuovamente il parametro finché non si ottiene il risultato desiderato.
Nota:Il numero di secondi necessari nel parametro può variare. Utilizza numeri che funzionino in modo affidabile per la tua base di celle di lavoro CTE.
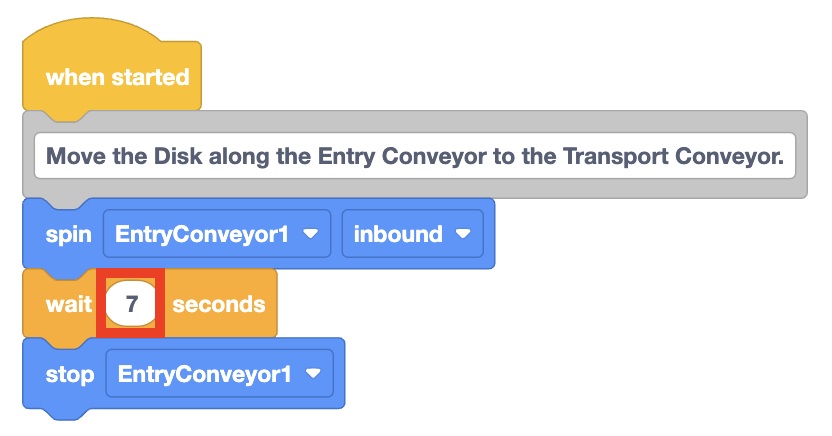
Aggiungere i blocchi necessari per spostare il disco lungo il trasportatore.
Si noti che si tratta degli stessi blocchi utilizzati per l'Entry Conveyor, solo che i parametri sono impostati su 'TransportConveyor2' e 'forward'.
Scarica il progetto sul Brain ed eseguilo per testarlo. Il disco si sposta lungo l'intera lunghezza del trasportatore, fermandosi al deviatore? In caso contrario, regolare il parametro del blocco Waitfinché non avviene.
Per vostra informazione
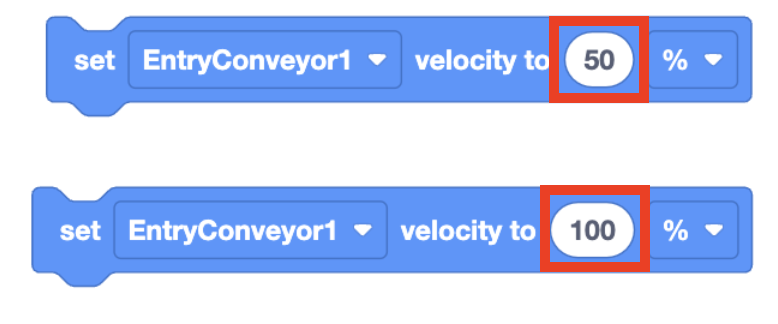
La velocità alla quale gli oggetti si spostano lungo un trasportatore può essere modificata utilizzando il blocco Imposta velocità motore . È possibile modificare il parametro nel blocco per far girare il trasportatore più velocemente o più lentamente. La velocità predefinita del trasportatore è del 50%, mentre la velocità massima è del 100%.
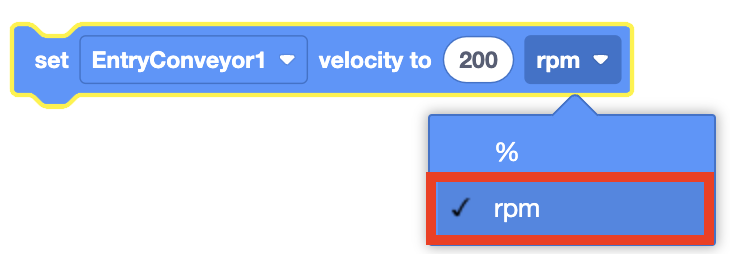
Il parametro del blocco Imposta velocità motore può essere impostato anche in giri al minuto, ovvero in giri al minuto.
Attività
Ora che hai utilizzato movimenti basati sul tempo per codificare i trasportatori in modo da spostare un disco dal trasportatore di ingresso e lungo il trasportatore di trasporto fino al trasportatore di uscita, puoi proseguire con il tuo progetto per spostare il disco fino alla fine del trasportatore di uscita senza che cada dall'estremità del trasportatore.
Impostazione:Posizionare un disco all'inizio del trasportatore di ingresso come mostrato di seguito.
Attività: Creare un progetto VEXcode che trasporterà un disco dal trasportatore di ingresso, lungo il trasportatore di trasporto, fino alla fine del trasportatore di uscita.
- Pianifica come sviluppare il tuo progetto per spostare il disco alla fine del trasportatore di uscita.
- Documenta il tuo piano nel tuo quaderno di progettazione.
- Rinomina il progetto Unità 4 Lezione 2 Attività e salvalo sul tuo dispositivo prima di iniziare a modificare il progetto.
- Modifica il progetto in VEXcode in modo che corrisponda al piano concordato dal tuo gruppo.
- Posizionare un disco sul punto di partenza del trasportatore di ingresso ed eseguire il progetto. I trasportatori spostano il disco fino alla fine del trasportatore di uscita senza che cada? Interrompere il progetto quando i nastri trasportatori hanno terminato il loro movimento e annotare le osservazioni nel quaderno di progettazione.
- Se il disco cade dall'estremità del trasportatore di uscita, modifica il progetto finché il disco non raggiunge l'estremità del trasportatore senza cadere. Documenta eventuali modifiche nel tuo quaderno di progettazione.
Controlla la tua comprensione
Prima di passare alla lezione successiva, assicurati di aver compreso i concetti di questa lezione rispondendo alle seguenti domande sul tuo quaderno di progettazione.
Controlla le tue domande di comprensione > ( Google Doc / .docx / .pdf )
Selezionare Avanti > per passare alla riflessione dell'unità centrale.