
บทที่ 2: การเข้ารหัสสายพานลำเลียง
ก่อนหน้านี้ คุณได้เรียนรู้เกี่ยวกับสายพานลำเลียงและตัวเปลี่ยนทาง และวิธีที่อุปกรณ์เหล่านี้ช่วยให้ขนส่งวัสดุในโรงงานได้อย่างมีประสิทธิภาพ คุณยังได้เรียนรู้เกี่ยวกับการทำงานของสายพานลำเลียงบน CTE Workcell อีกด้วย ตอนนี้คุณพร้อมที่จะเริ่มเขียนโค้ดสายพานลำเลียงเพื่อขนส่งดิสก์แล้ว ในบทเรียนนี้คุณจะได้เรียนรู้:
- วิธีการกำหนดค่ามอเตอร์สายพานลำเลียงแต่ละตัวใน VEXcode
- วิธีการสร้างโครงการ VEXcode เพื่อย้ายดิสก์จากสายพานลำเลียงหนึ่งไปยังอีกสายพานลำเลียงหนึ่งโดยใช้การเคลื่อนไหวตามเวลา
เมื่อสิ้นสุดบทเรียนนี้ คุณจะสร้างโปรเจ็กต์ในการขนส่งดิสก์ตั้งแต่สายพานลำเลียงเข้า ผ่านสายพานลำเลียงขนส่ง และไปยังสายพานลำเลียงทางออก
การเตรียมพร้อมในการเขียนโค้ดสายพานลำเลียง
ก่อนที่คุณจะสามารถเขียนโค้ดสายพานลำเลียงบน CTE Workcell มีงานสำคัญบางอย่างที่คุณต้องทำเสร็จเพื่อเตรียมพร้อม คุณจะต้องกำหนดค่ามอเตอร์สายพานลำเลียงแต่ละตัวใน VEXcode คุณจะต้องปรับเปลี่ยนสแต็กของบล็อกที่เริ่มการหยุดแบบควบคุมด้วยเพื่อให้แน่ใจว่ามอเตอร์สายพานลำเลียงทั้งหมดรวมอยู่ด้วย
การกำหนดค่ามอเตอร์แต่ละตัวใน VEXcode
สายพานลำเลียงแต่ละตัวบน CTE Workcell จะถูกควบคุมด้วยมอเตอร์แยกกัน เนื่องจากเหตุนี้ คุณจะต้องเพิ่มมอเตอร์แต่ละตัวลงในการกำหนดค่าใน VEXcode ก่อนจึงจะเริ่มโปรเจ็กต์ของคุณได้ นอกจากนี้ คุณจะต้องแน่ใจว่ามอเตอร์แต่ละตัวได้รับการตั้งชื่ออย่างถูกต้อง และถูกตั้งค่าให้หมุนตามทิศทางที่จำเป็นต่อการขนส่งวัสดุสำเร็จ
การกำหนดค่ามอเตอร์สายพานลำเลียงเข้า
เปิดโครงการเทมเพลต Brain CTE 6-Axis Arm Base
หมายเหตุ:สำหรับการเตือนความจำเกี่ยวกับวิธีการเปิดตัวอย่างใน VEXcode EXP โปรดดูหน่วยก่อนหน้า

เปลี่ยนชื่อโครงการเป็น หน่วย 4 บทที่ 2และบันทึกลงในอุปกรณ์ของคุณ

เปิดหน้าต่างอุปกรณ์

เลือก เพิ่มอุปกรณ์

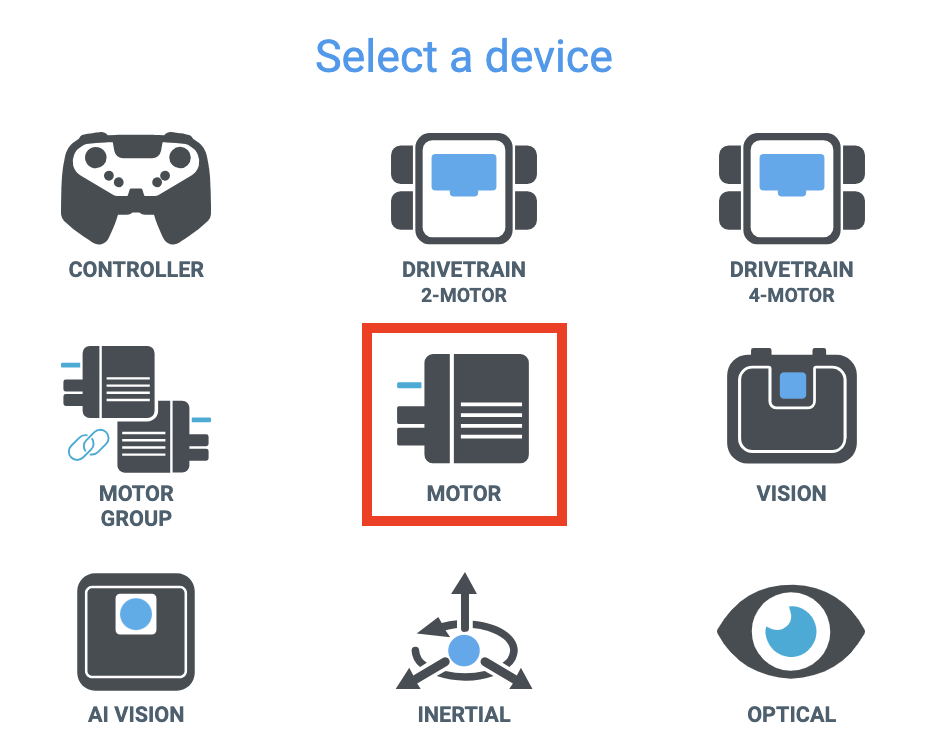
เลือก มอเตอร์ จากรายการอุปกรณ์
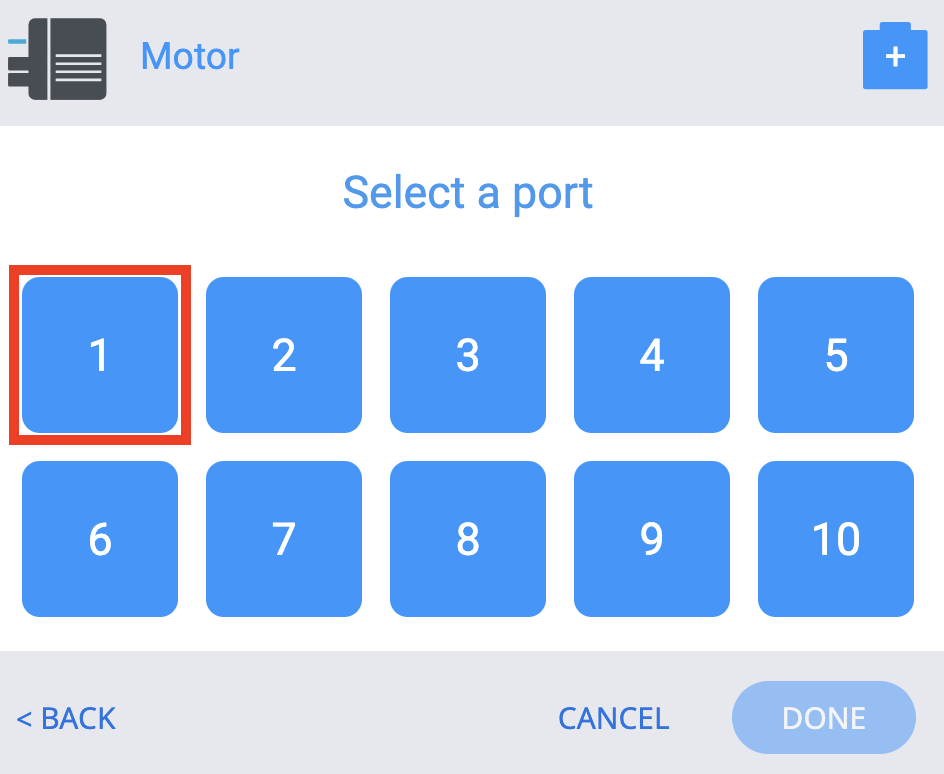
เลือกพอร์ต 1 บน Brain ให้ตรงกับพอร์ตที่มอเตอร์สายพานลำเลียงเสียบอยู่
หมายเหตุ:ตรวจสอบให้แน่ใจว่ามอเตอร์สายพานลำเลียงเสียบอยู่ที่พอร์ต 1 บนสมอง
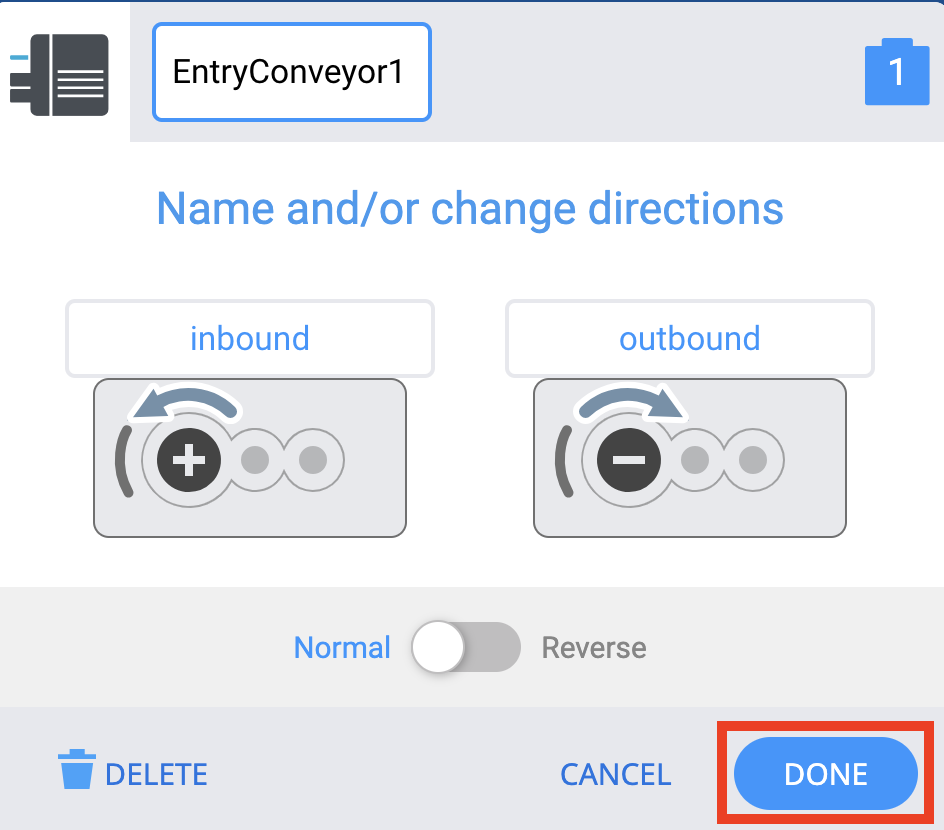
แก้ไขฉลากให้ตรงกับภาพนี้
- ควรเปลี่ยนชื่อมอเตอร์เพื่อระบุให้ชัดเจนว่าเป็นมอเตอร์สายพานลำเลียงเข้า ตัวเลขในชื่ออ้างอิงถึงพอร์ตที่เสียบอยู่
- ควรเปลี่ยนชื่อทิศทางของมอเตอร์เป็น ขาเข้า และ ขาออกเนื่องจากป้ายกำกับ เดินหน้า และ ถอยหลังเริ่มต้นไม่ได้อธิบายการเคลื่อนที่ของสายพานลำเลียงอย่างเพียงพอ
ขาเข้า หมายความว่าสายพานลำเลียงขาเข้ากำลังหมุน ไปทาง ของสายพานลำเลียงขนส่ง ขาออกหมายความว่าสายพานลำเลียงเข้ากำลังหมุน ออก จากสายพานลำเลียงขนส่ง
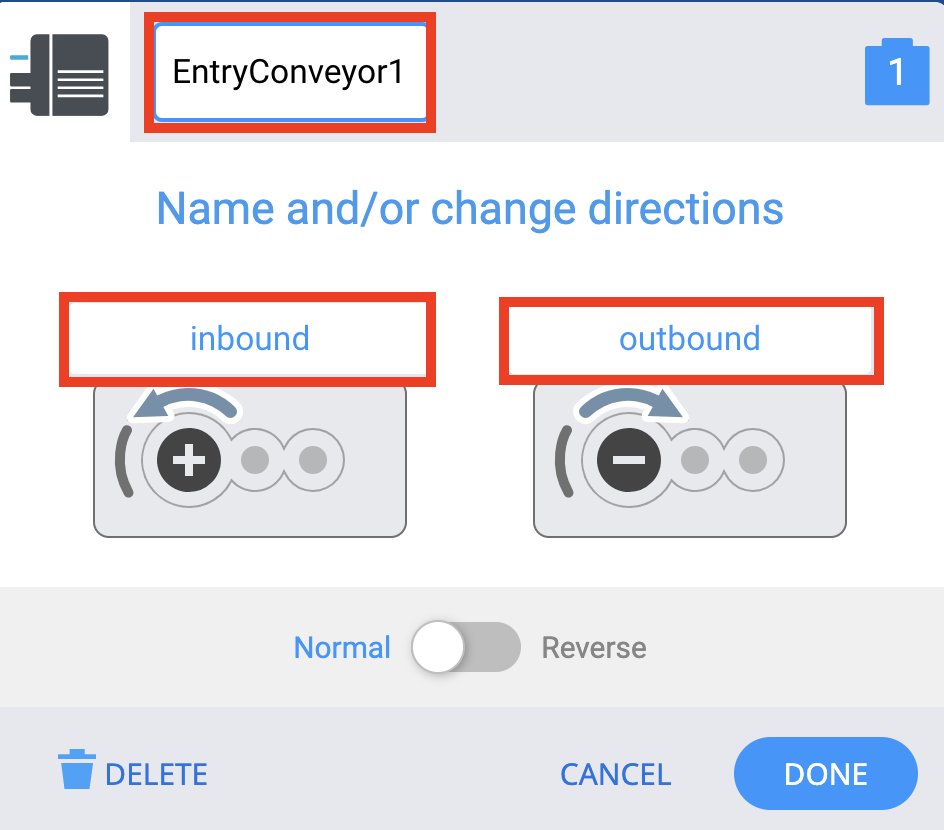
เลือก เสร็จ.
การกำหนดค่ามอเตอร์สายพานลำเลียงทางออก
มอเตอร์สายพานลำเลียงทางออกสามารถกำหนดค่าได้ในลักษณะเดียวกับมอเตอร์สายพานลำเลียงทางเข้า
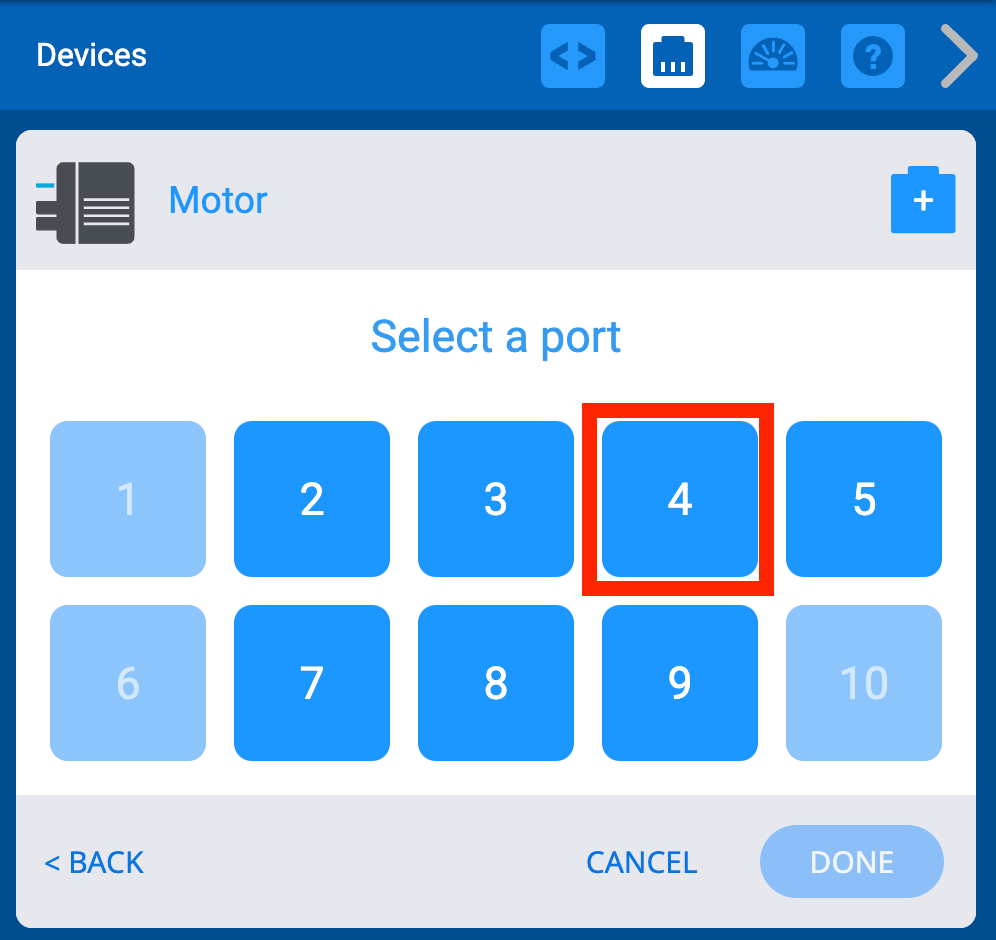
ในหน้าต่างอุปกรณ์ เลือก มอเตอร์ จากรายการอุปกรณ์

เลือกพอร์ต 4 ให้ตรงกับพอร์ตที่เสียบมอเตอร์สายพานลำเลียงทางออกไว้
หมายเหตุ:ตรวจสอบให้แน่ใจว่ามอเตอร์สายพานลำเลียงทางออกเสียบอยู่ที่พอร์ต 4 บน Brain
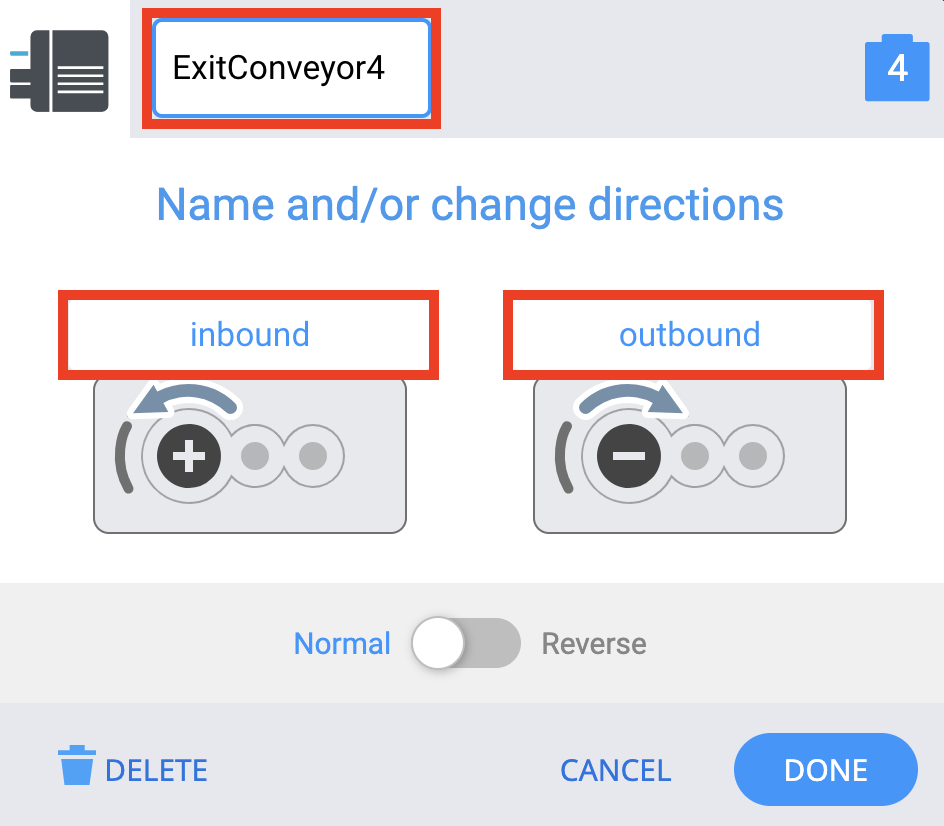
แก้ไขป้ายกำกับให้ตรงกับที่อยู่ในรูปภาพ
- ควรเปลี่ยนชื่อมอเตอร์เพื่อระบุให้ชัดเจนว่าเป็นมอเตอร์สายพานลำเลียงทางออก ตัวเลขในชื่ออ้างอิงถึงพอร์ตที่เสียบอยู่
- ทิศทางของมอเตอร์ควรได้รับการเปลี่ยนชื่อเป็นขาเข้าและขาออก และเช่นเดียวกับที่คุณทำไว้ก่อนหน้านี้สำหรับ Entry Conveyor
ขาเข้าหมายความว่าสายพานลำเลียงขาออกกำลังหมุนไปทางสายพานลำเลียงขนส่ง ขาออกหมายความว่าสายพานลำเลียงขาออกกำลังหมุนออก จากสายพานลำเลียงขนส่ง
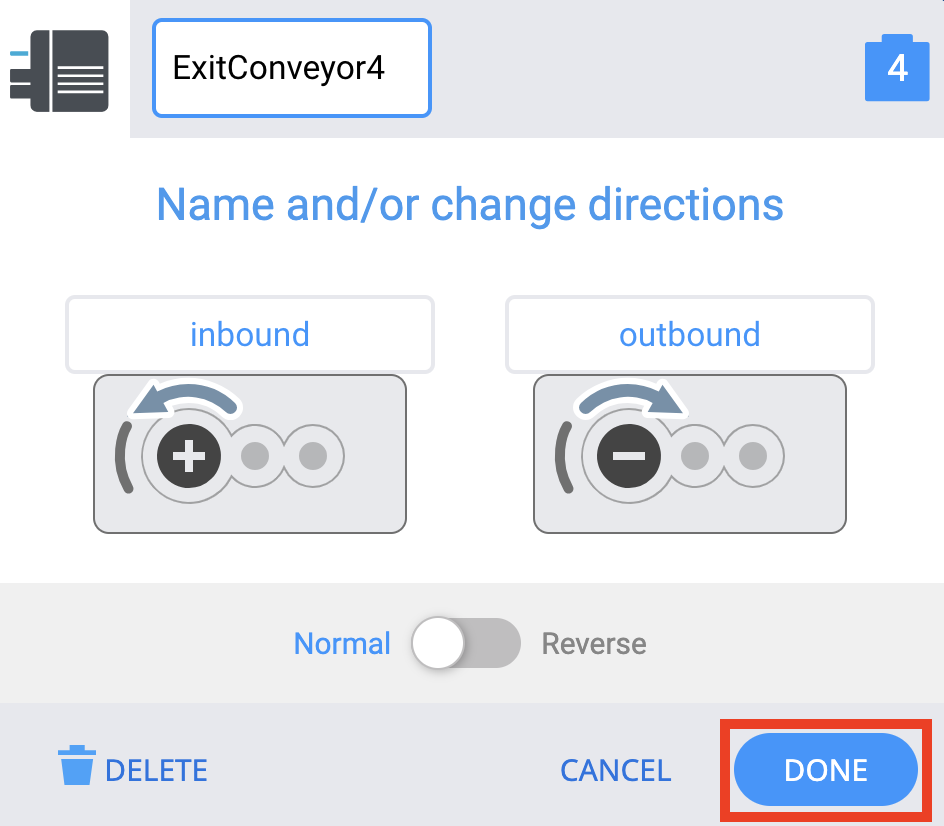
เลือก เสร็จสิ้น
การกำหนดค่ามอเตอร์สายพานลำเลียง
สุดท้ายคุณจะต้องกำหนดค่ามอเตอร์สายพานลำเลียง นอกจากนี้ คุณจะต้องย้อนทิศทางของมอเตอร์เพื่อให้สายพานลำเลียงเคลื่อนที่ไปในทิศทางที่ต้องการ
ในหน้าต่างอุปกรณ์ เลือก มอเตอร์ จากรายการอุปกรณ์
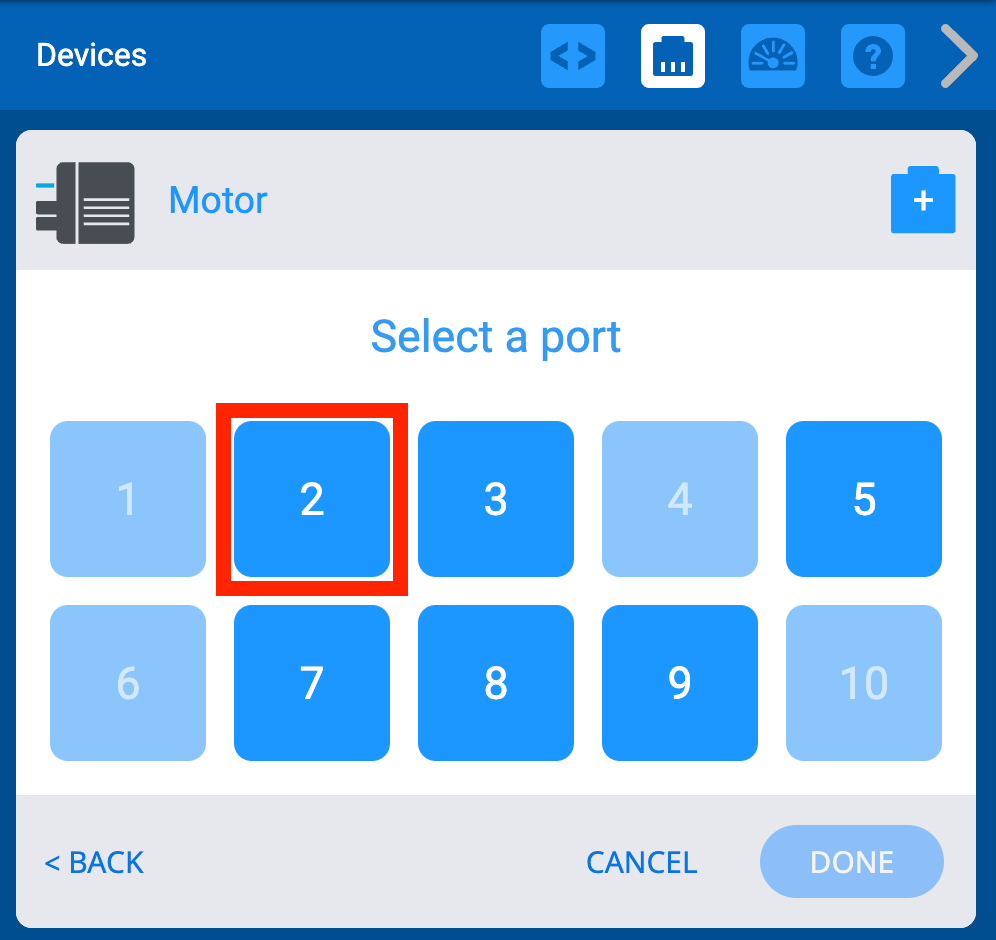
เลือกพอร์ต 2 ให้ตรงกับพอร์ตที่มอเตอร์สายพานลำเลียงเสียบอยู่
หมายเหตุ:ตรวจสอบให้แน่ใจว่ามอเตอร์สายพานลำเลียงเสียบอยู่ที่พอร์ต 2 บน Brain
เปลี่ยนชื่อมอเตอร์เป็น
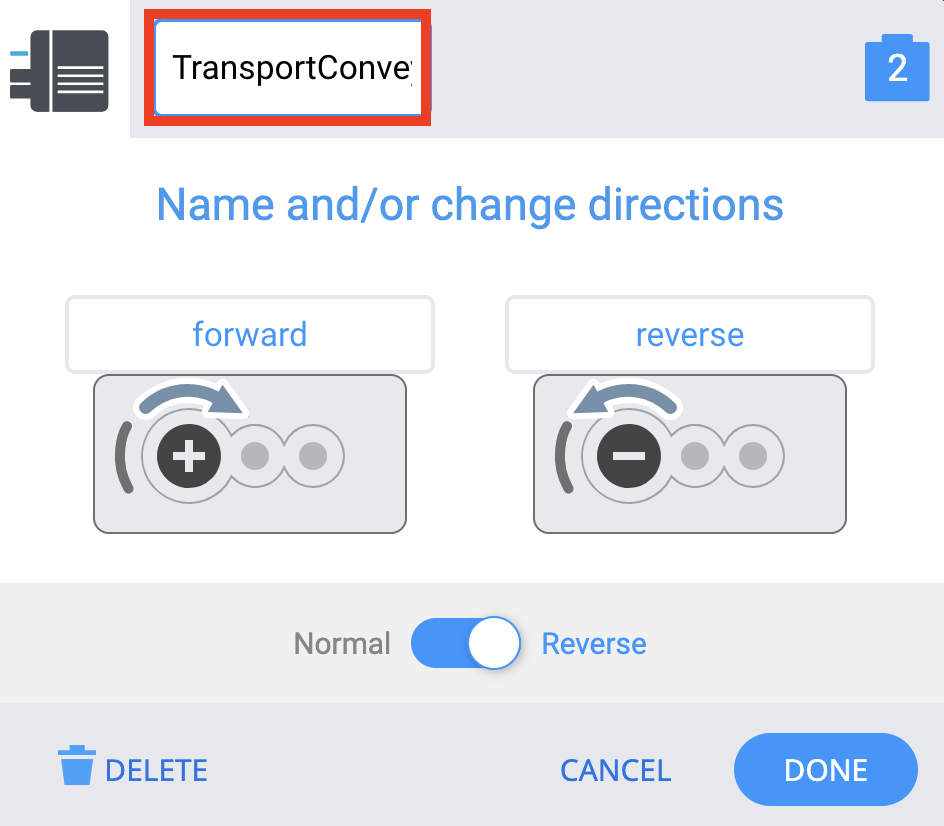
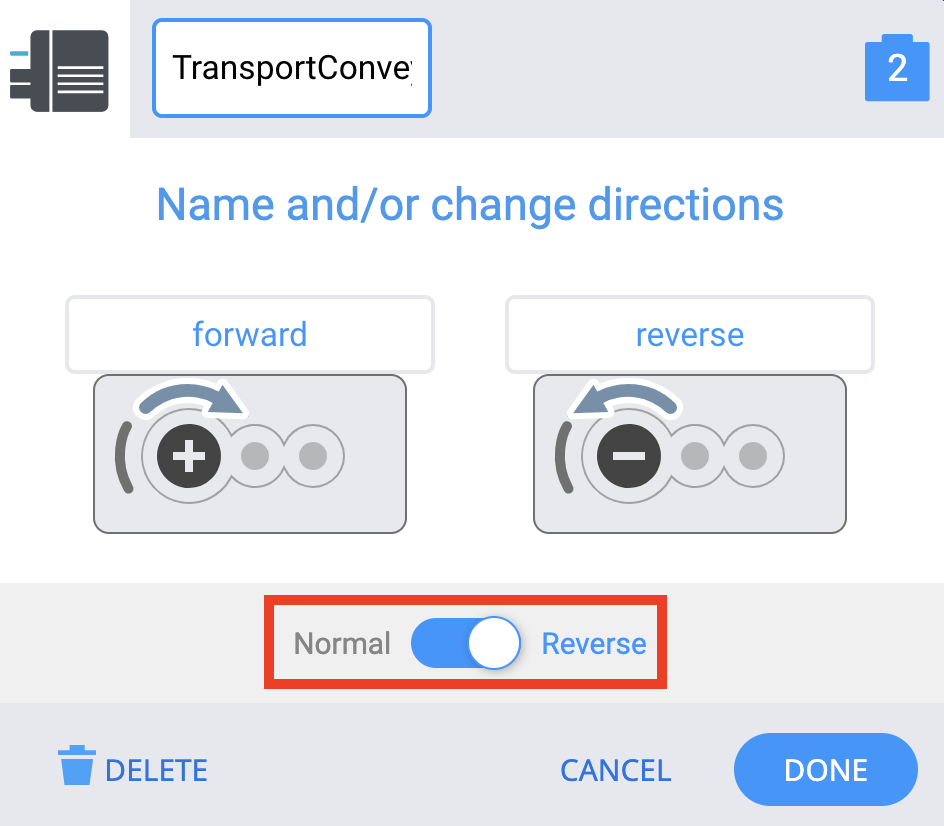
เพื่อให้สายพานลำเลียงเคลื่อนย้ายวัสดุไปในทิศทางที่ถูกต้อง คุณจะต้องเลือกปุ่มสลับเพื่อเปลี่ยนทิศทางของมอเตอร์จาก ปกติ เป็น ถอยหลัง
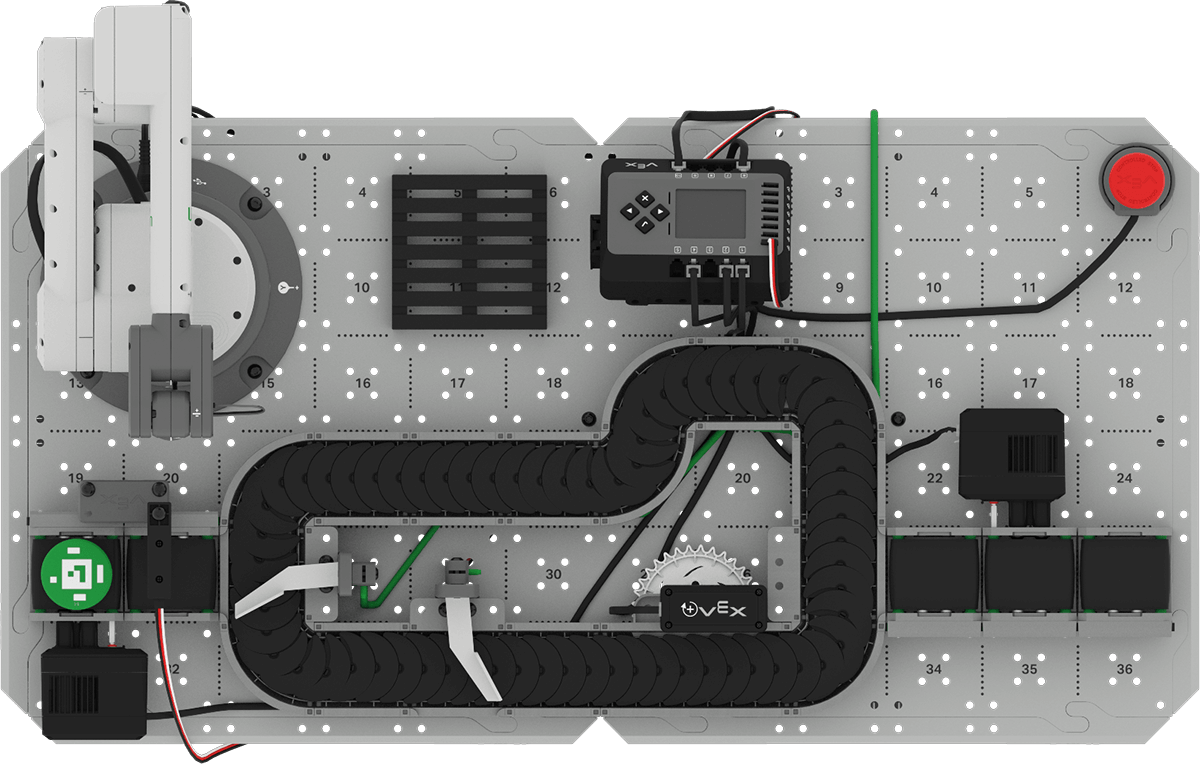
มอเตอร์สายพานลำเลียงทิศทาง
ขณะกำหนดค่ามอเตอร์สายพานลำเลียง คุณต้องย้อนทิศทางของมัน เนื่องจากมอเตอร์จะหมุนสายพานลำเลียงตามเข็มนาฬิกาตามค่าเริ่มต้น คุณสามารถกำหนดทิศทางการหมุนเริ่มต้นของมอเตอร์ได้โดยอ้างอิงจากฉลากของมอเตอร์
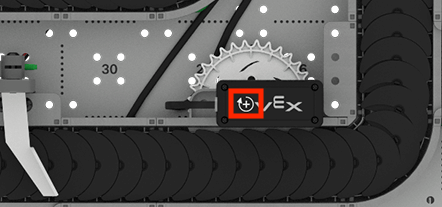
ที่ด้านบนของมอเตอร์แต่ละตัวจะมีไอคอนระบุทิศทางที่เป็นบวก ในกรณีของสายพานลำเลียงลูกศรจะชี้ตามเข็มนาฬิกา ซึ่งหมายความว่าโดยค่าเริ่มต้น ดิสก์ใดๆ ที่วางอยู่บนสายพานลำเลียงขนส่งจะหมุนจากสายพานลำเลียงเข้าไปยังตัวแยกตัวแรก การย้อนกลับมอเตอร์ในการกำหนดค่าจะช่วยให้คุณมั่นใจได้ว่าทิศทาง ไปข้างหน้าตรงกับเส้นทางที่ถูกต้องตามสายพานลำเลียง
การปรับเปลี่ยนการหยุดควบคุม
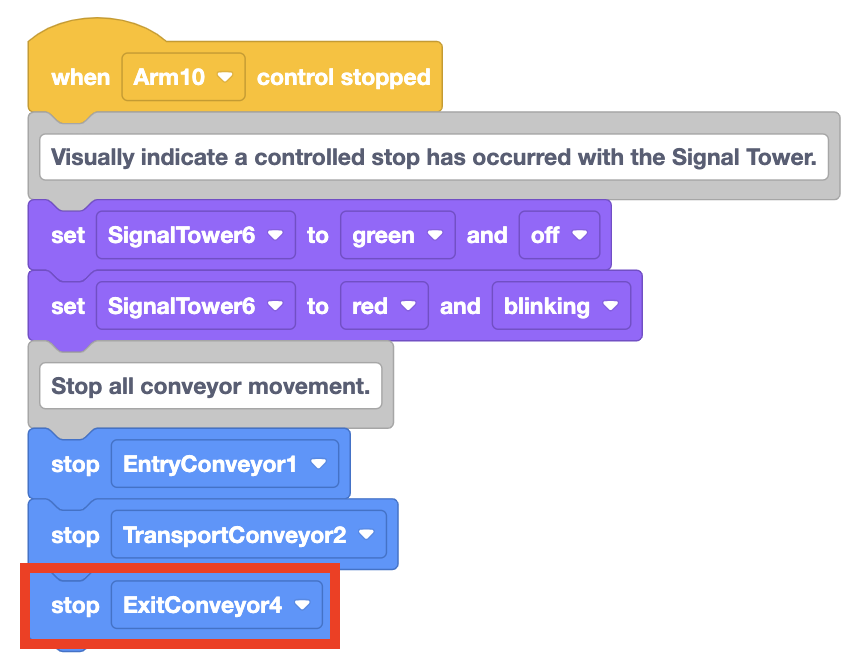
ตอนนี้คุณได้กำหนดค่ามอเตอร์สายพานลำเลียงทั้งหมดแล้ว คุณต้องอัปเดตการหยุดควบคุม เมื่อมีการหยุดแบบควบคุม มอเตอร์ทั้งหมดจะหยุดทำงาน เพื่อให้คุณแน่ใจว่า CTE Workcell Base จะปลอดภัยต่อการเคลื่อนย้าย คุณกำลังจะเพิ่มบล็อกลงในบล็อกหมวกเมื่อควบคุมหยุดเพื่อหยุดมอเตอร์สายพานลำเลียงเหล่านี้
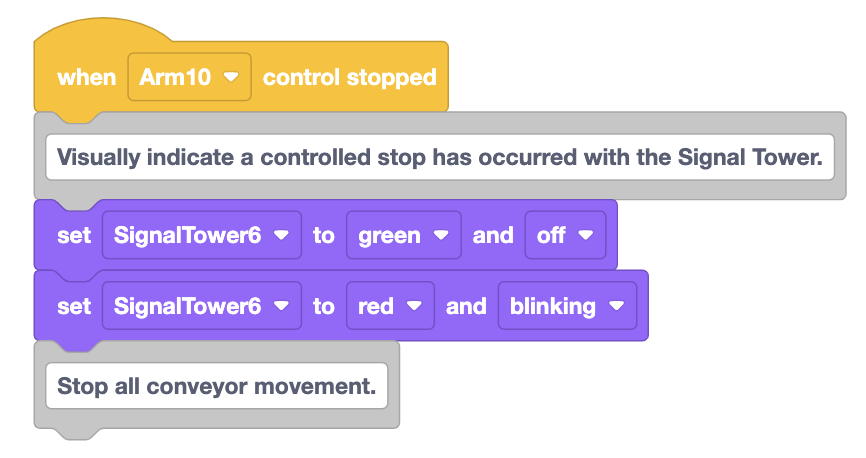
สร้างความคิดเห็น รายการ เพื่ออธิบายพฤติกรรมของสายพานลำเลียงที่จำเป็นในระหว่างการหยุดที่ควบคุม

เพิ่มบล็อกComment ในสแต็กบล็อกที่มีอยู่
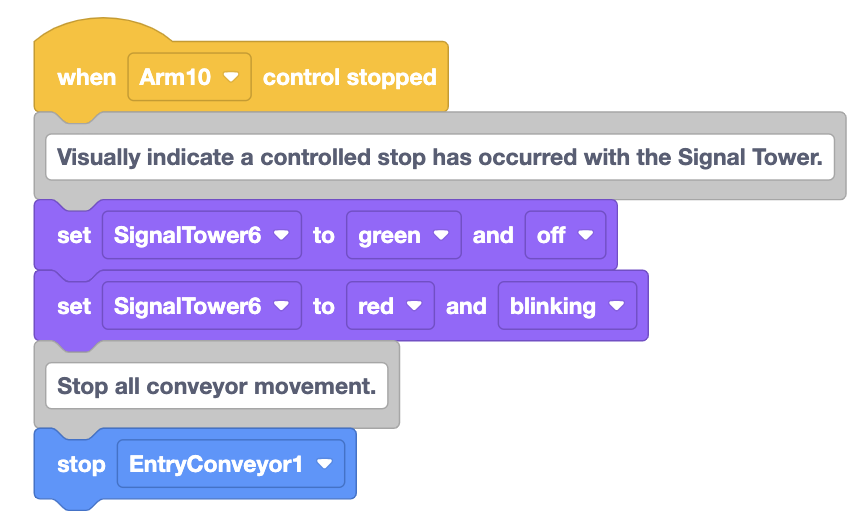
ลากบล็อกมอเตอร์ Stop ออกมาเพื่อหยุดสายพานลำเลียงเข้า และยึดเข้ากับกองบล็อก
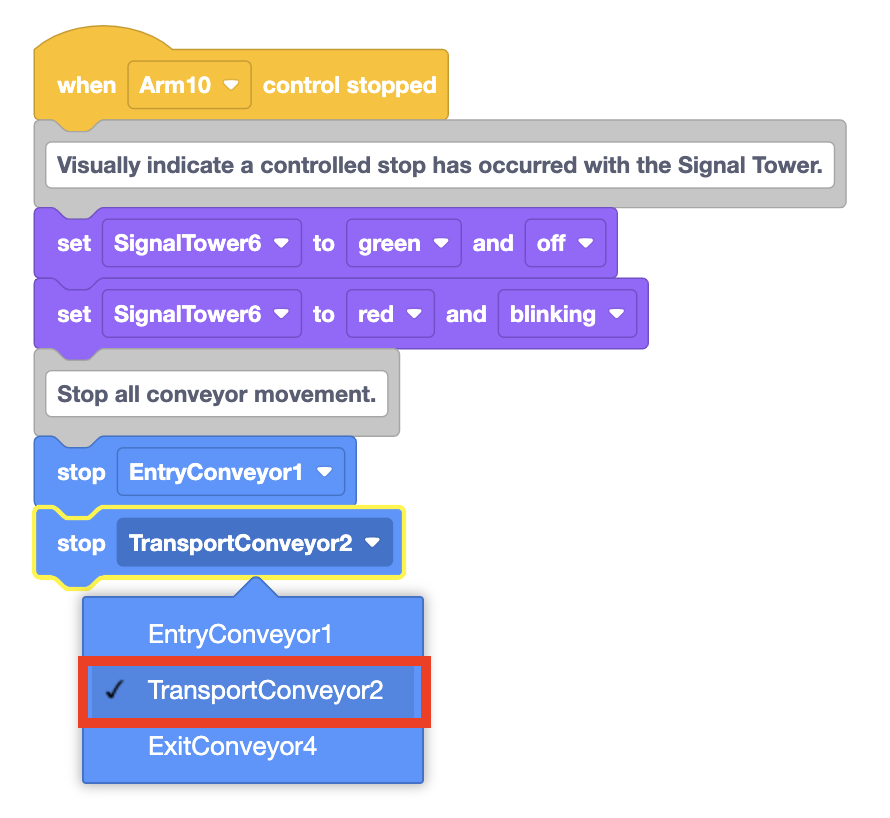
ลากบล็อกมอเตอร์ Stop อีก ออกมาแล้วติดไว้ที่ด้านล่างของกองบล็อก
เลือกลูกศรเพื่อเปิดเมนูแบบดรอปดาวน์และเลือก 'TransportConveyor2' เพื่อตั้งค่าพารามิเตอร์ในการหยุดสายพานลำเลียงในการหยุดที่ควบคุมได้
เพิ่มบล็อกมอเตอร์ Stop ที่สาม ลงในสแต็ก เปลี่ยนพารามิเตอร์เป็น 'ExitConveyor4'
การสร้างโปรเจ็กต์เพื่อขนส่งดิสก์โดยใช้สายพานลำเลียง
ตอนนี้คุณได้กำหนดค่ามอเตอร์สายพานลำเลียงและแก้ไขการหยุดควบคุมแล้ว คุณสามารถเริ่มสร้างโครงการสำหรับขนส่งดิสก์โดยใช้สายพานลำเลียงได้ คุณจะเริ่มสร้างโครงการเพื่อให้ดิสก์เดินทางจากสายพานลำเลียงเข้า ไปตามสายพานลำเลียงขนส่งไปยังสายพานลำเลียงทางออก ในการดำเนินการดังกล่าว จำเป็นต้องประสานการเคลื่อนตัวของดิสก์ตามสายพานลำเลียงอย่างระมัดระวัง วิธีหนึ่งในการบรรลุการประสานงานนี้คือการสร้างโครงการโดยใช้การเคลื่อนไหวตามเวลา ดังที่แสดงในวิดีโอด้านล่าง
การเคลื่อนไหวตามระยะเวลา
ด้วยการใช้ชุดมอเตอร์ Wait, Spinและ Stop จำนวน บล็อก คุณสามารถสร้างโปรเจ็กต์ที่แต่ละสายพานลำเลียงจะเริ่มและหยุดในเวลาที่เหมาะสมเพื่อถ่ายโอนดิสก์จากสายพานลำเลียงหนึ่งไปยังสายพานลำเลียงถัดไป วิธีการเข้ารหัสสายพานลำเลียงนี้เรียกว่าการใช้การเคลื่อนไหวตามเวลา
การสร้างโครงการ
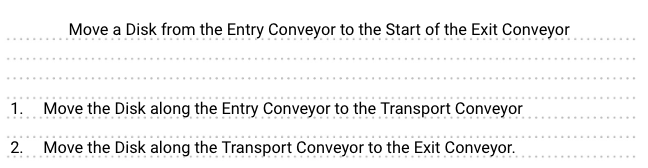
บันทึกขั้นตอนการวางแผนที่จำเป็นในการเคลื่อนย้ายดิสก์ เช่น ขั้นตอนที่แสดงในรูปภาพนี้ ลงในสมุดบันทึกวิศวกรรมของคุณ
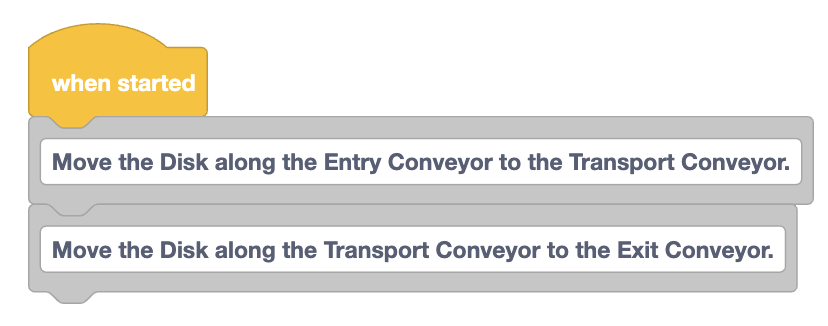
สร้างบล็อก ความคิดเห็น บล็อกสำหรับแต่ละขั้นตอนของแผนของคุณ และแนบเข้ากับบล็อก เมื่อเริ่มต้น
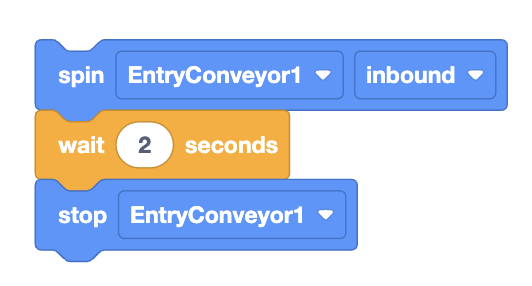
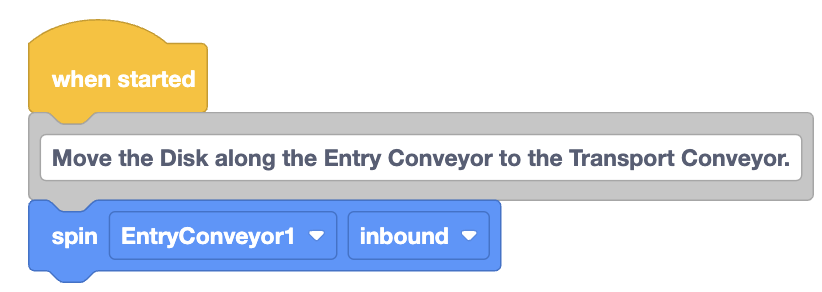
แนบบล็อค Spinใต้ ความคิดเห็นแรก
ดิสก์กำลังเริ่มต้นบนสายพานลำเลียงเข้าและไปในทิศทางของสายพานลำเลียงขนส่ง ดังนั้นพารามิเตอร์จึงสามารถตั้งค่าเป็น 'EntryConveyor1' และ 'inbound' ได้
บล็อกSpinจะหมุนมอเตอร์ตลอดไปจนกว่าจะได้รับคำสั่งให้หยุดมอเตอร์
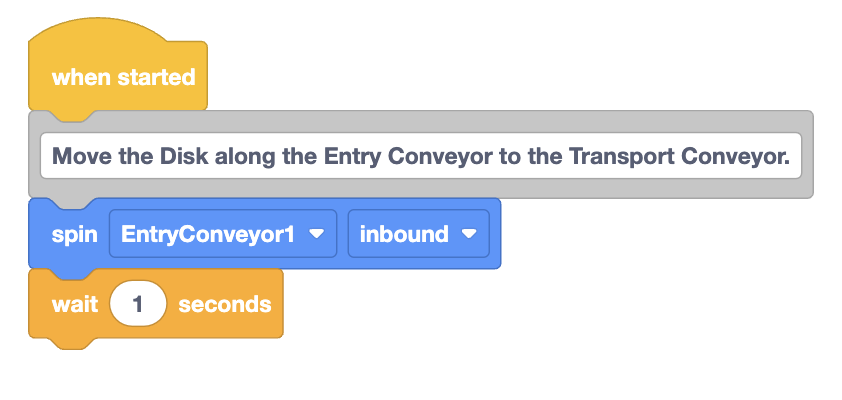
จากนั้นแนบบล็อก Wait
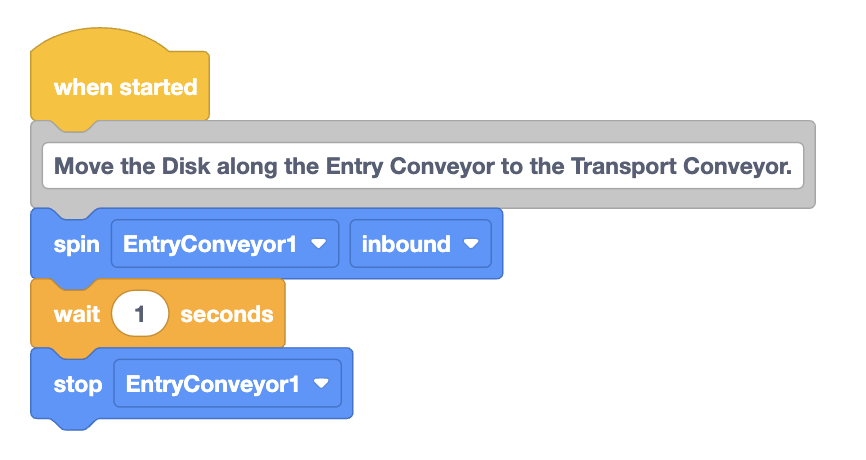
ติดบล็อกมอเตอร์ Stopเข้ากับส่วนล่างของกองบล็อก ตรวจสอบให้แน่ใจว่าได้ตั้งค่าพารามิเตอร์เป็น 'EntryConveyor1'
ทำนายสิ่งที่คุณคิดว่าจะเกิดขึ้นเมื่อดำเนินโครงการ บันทึกไว้ในสมุดบันทึกวิศวกรรมของคุณ
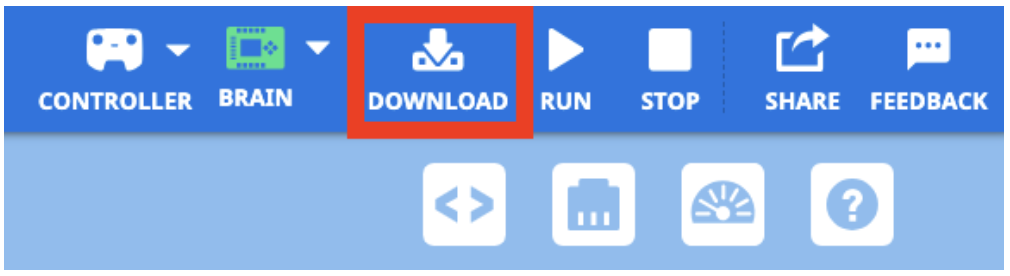
ตรวจสอบให้แน่ใจว่า Brain เชื่อมต่อกับ VEXcode และดาวน์โหลดโครงการไปยัง Brain
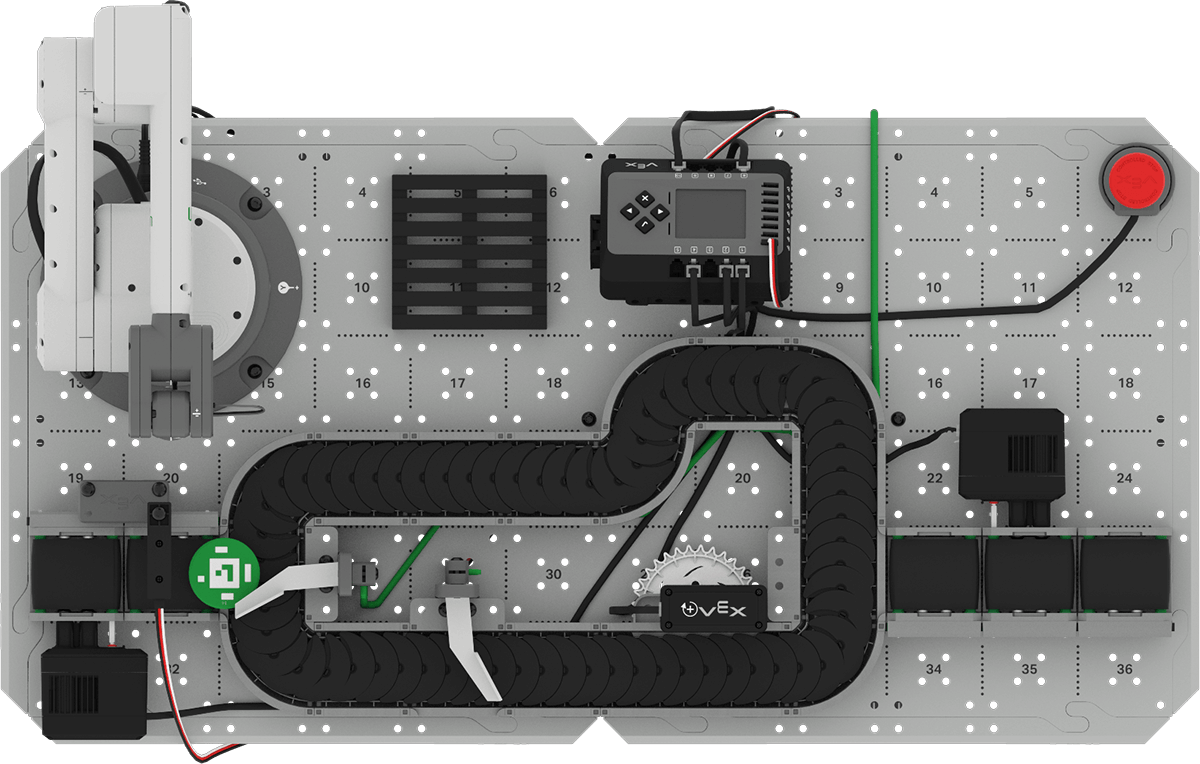
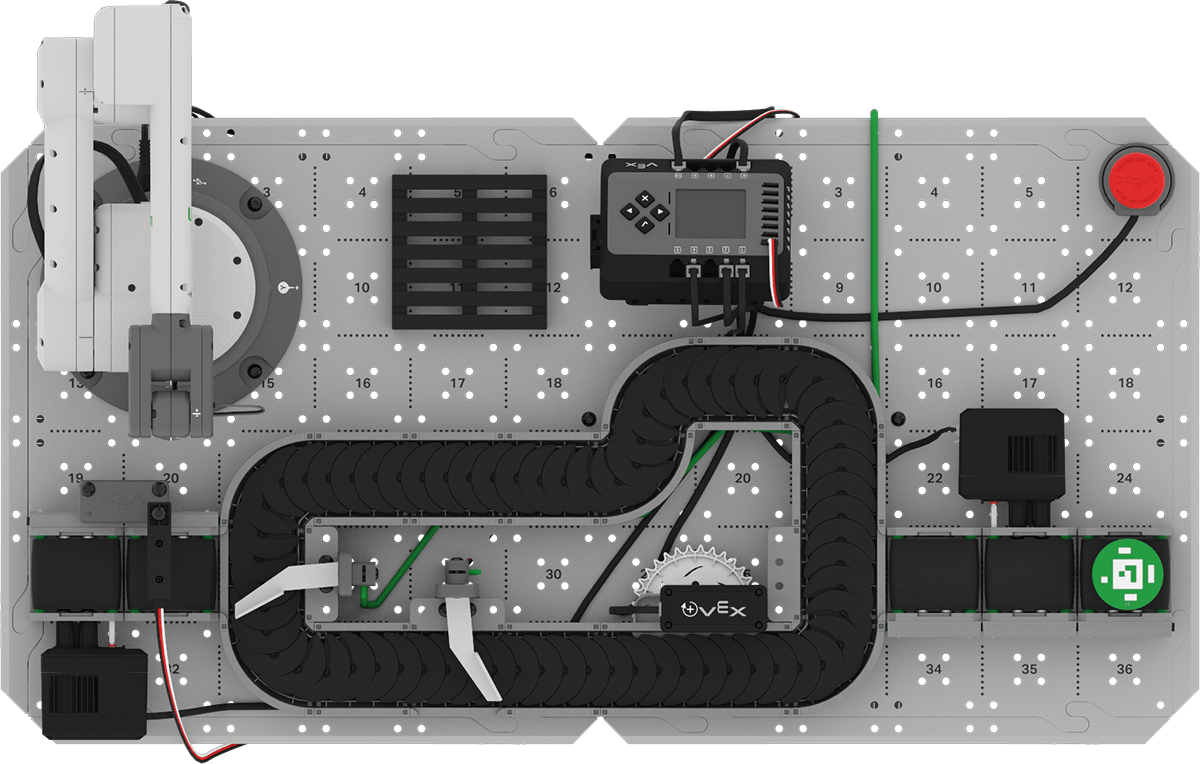
ตรวจสอบให้แน่ใจว่าได้วางดิสก์สีเขียวไว้ที่จุดเริ่มต้นของสายพานลำเลียงเข้า ดังที่แสดงที่นี่ กดปุ่ม Check บน Brain เพื่อรันโครงการเพื่อทดสอบ
สังเกตพฤติกรรมของสายพานลำเลียง มันจะขนส่งดิสก์ไปที่ปลายสายพานลำเลียงเข้าใช่ไหม? ทำไมหรือทำไมไม่?
เมื่อสายพานลำเลียงหยุดเคลื่อนที่ ให้กดปุ่ม X บน Brain เพื่อหยุดโครงการ บันทึกการสังเกตของคุณลงในสมุดบันทึกวิศวกรรมของคุณ

การกำหนดเวลาสายพานลำเลียง
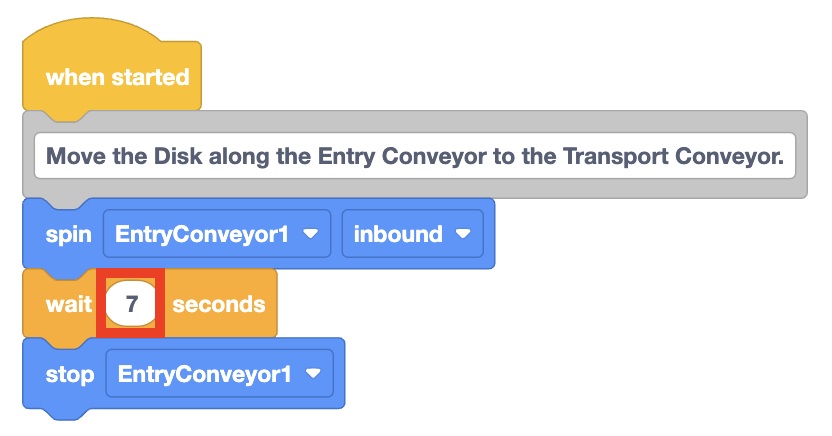
เมื่อคุณรันโปรเจ็กต์ของคุณ คุณอาจสังเกตเห็นว่า Entry Conveyor ไม่ได้เคลื่อนย้ายดิสก์ไปจนถึง Transport Conveyor เนื่องจากพารามิเตอร์ในบล็อก Wait ถูกกำหนดเป็น 1 วินาทีเท่านั้น จำเป็นต้องเพิ่มเวลาให้สายพานลำเลียงหมุนก่อนที่บล็อกมอเตอร์ Stopจะทำงาน
ขณะที่คุณสร้างและทดสอบโครงการโดยใช้การเคลื่อนไหวตามเวลา คุณอาจต้องปรับพารามิเตอร์ในบล็อก รอ มากกว่าหนึ่งครั้งเพื่อให้ได้เวลาที่ถูกต้อง
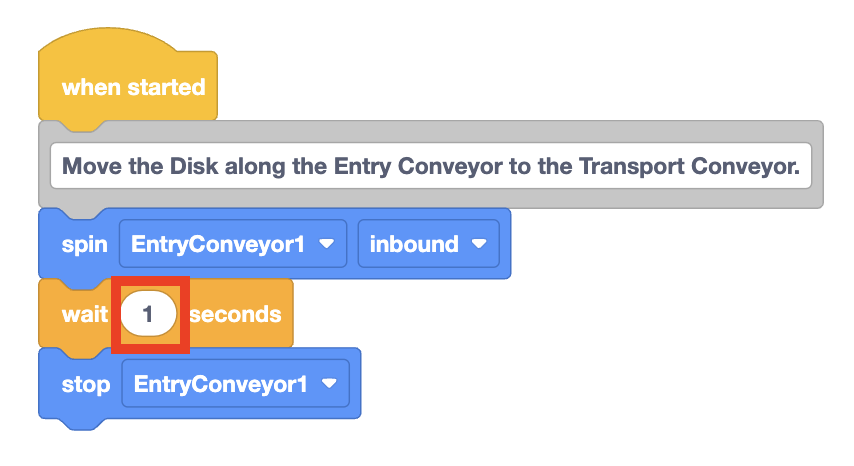
ปรับพารามิเตอร์ในบล็อก รอ วินาทีเป็น 7 วินาที จากนั้นดาวน์โหลดและเรียกใช้โครงการอีกครั้งเพื่อทดสอบ
Entry Conveyor ลำเลียงดิสก์ไปจนถึงปลายทางที่สายพานลำเลียงสามารถหยิบขึ้นมาได้หรือไม่ หากไม่เป็นเช่นนั้น ให้ปรับพารามิเตอร์อีกครั้งจนกระทั่งเป็นเช่นนั้น
หมายเหตุ:จำนวนวินาทีที่จำเป็นในพารามิเตอร์อาจแตกต่างกันไป ใช้ตัวเลขที่เชื่อถือได้สำหรับ CTE Workcell Base ของคุณ
เพิ่มบล็อคที่จำเป็นในการเคลื่อนย้ายดิสก์ไปตามสายพานลำเลียง
โปรดทราบว่าบล็อกเหล่านี้เป็นบล็อกเดียวกันกับที่ใช้สำหรับ Entry Conveyor โดยมีเพียงพารามิเตอร์ที่ตั้งเป็น 'TransportConveyor2' และ 'forward' เท่านั้น
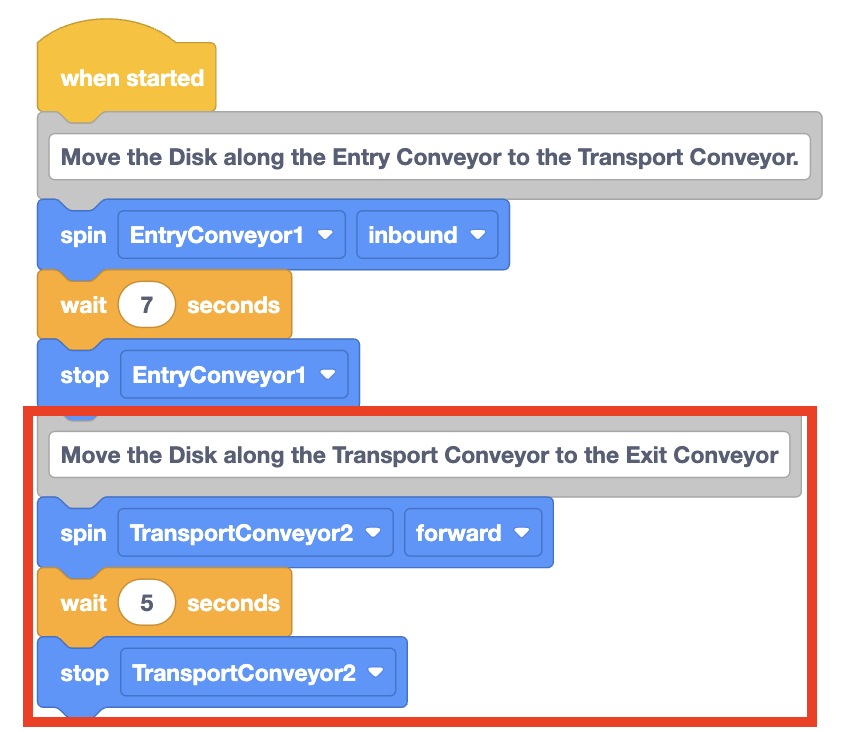
ดาวน์โหลดโครงการไปยัง Brain และรันเพื่อทดสอบ ดิสก์เคลื่อนที่ไปตามความยาวของสายพานลำเลียงโดยหยุดที่ตัวเปลี่ยนทางหรือไม่ หากไม่เป็นเช่นนั้น ให้ปรับพารามิเตอร์ของบล็อก รอจนกว่าจะเป็นเช่นนั้น
เพื่อเป็นข้อมูลของคุณ
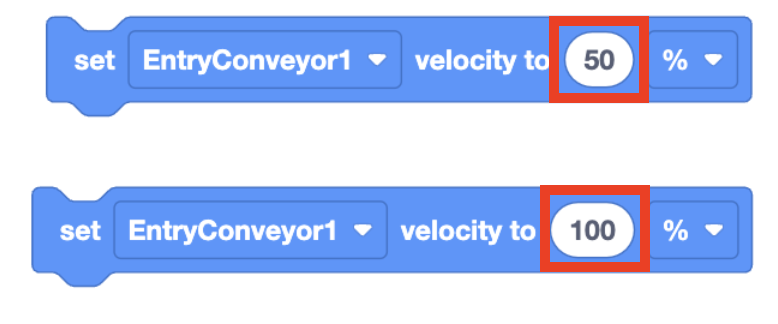
ความเร็วที่วัตถุเคลื่อนที่ไปตามสายพานลำเลียงสามารถปรับเปลี่ยนได้โดยใช้บล็อกความเร็วมอเตอร์ ตั้งค่า สามารถเปลี่ยนพารามิเตอร์ในบล็อคได้เพื่อทำให้สายพานลำเลียงหมุนเร็วขึ้นหรือช้าลง ความเร็วสายพานลำเลียงเริ่มต้นคือ 50% และความเร็วสูงสุดคือ 100%
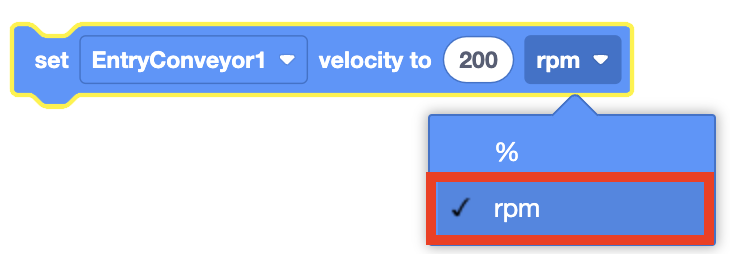
สามารถตั้งค่าพารามิเตอร์ความเร็วมอเตอร์ Set บล็อกได้โดยใช้รอบต่อนาทีหรือรอบการหมุนต่อนาที
กิจกรรม
ตอนนี้คุณได้ใช้การเคลื่อนไหวตามเวลาในการเขียนโค้ดสายพานลำเลียงเพื่อเคลื่อนย้ายดิสก์จากสายพานลำเลียงเข้าและไปตามสายพานลำเลียงขนส่งไปยังสายพานลำเลียงทางออกแล้ว คุณจะสร้างโปรเจ็กต์ของคุณเพื่อเคลื่อนย้ายดิสก์ไปยังปลายสายพานลำเลียงทางออกโดยไม่หลุดออกจากปลายสายพานลำเลียง
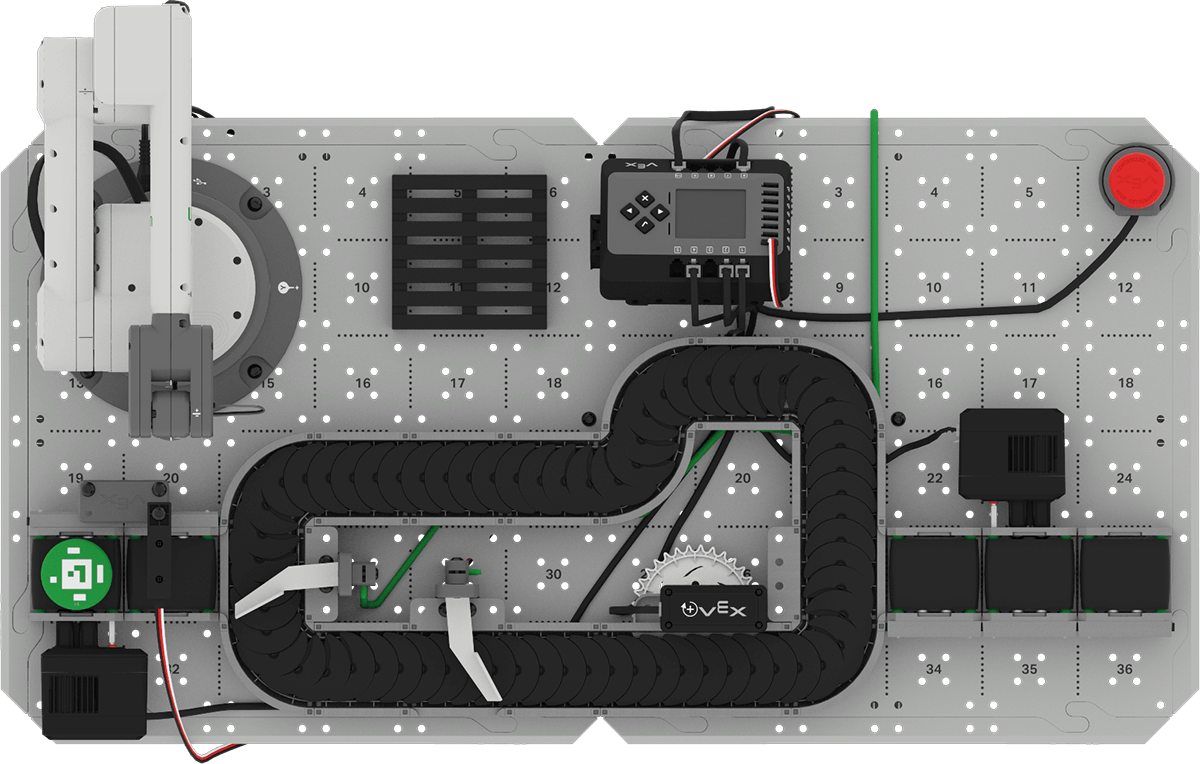
การตั้งค่า:วางดิสก์ไว้ที่จุดเริ่มต้นของสายพานลำเลียงเข้าตามที่แสดงด้านล่าง
กิจกรรม: สร้างโครงการ VEXcode ที่จะขนส่งดิสก์จากสายพานลำเลียงเข้าไปตามสายพานลำเลียงขนส่งจนถึงปลายสายพานลำเลียงทางออก
- วางแผนว่าคุณจะสร้างโครงการของคุณเพื่อย้ายดิสก์ไปยังปลายสายพานลำเลียงทางออกอย่างไร
- จดบันทึกแผนของคุณไว้ในสมุดบันทึกทางวิศวกรรมของคุณ
- เปลี่ยนชื่อโครงการของคุณ หน่วยที่ 4 บทที่ 2 กิจกรรม และบันทึกลงในอุปกรณ์ของคุณก่อนที่คุณจะเริ่มแก้ไขโครงการ
- แก้ไขโครงการใน VEXcode เพื่อให้ตรงกับแผนที่กลุ่มของคุณตกลงกัน
- วางดิสก์บนจุดเริ่มต้นของสายพานลำเลียงเข้าและรันโครงการ สายพานลำเลียงจะเคลื่อนย้ายดิสก์ไปที่ปลายสายพานลำเลียงทางออกโดยไม่หล่นออกมาหรือไม่? หยุดโครงการเมื่อสายพานลำเลียงเคลื่อนที่เสร็จสิ้น และบันทึกการสังเกตของคุณลงในสมุดบันทึกวิศวกรรมของคุณ
- หากดิสก์หลุดออกจากปลายสายพานลำเลียง ให้แก้ไขโครงการของคุณจนกว่าดิสก์จะเคลื่อนไปที่ปลายสายพานลำเลียงโดยไม่หลุดออก บันทึกการเปลี่ยนแปลงใดๆ ลงในสมุดบันทึกทางวิศวกรรมของคุณ
ตรวจสอบความเข้าใจของคุณ
ก่อนจะไปยังบทเรียนถัดไป ให้แน่ใจว่าคุณเข้าใจแนวคิดในบทเรียนนี้แล้วโดยตอบคำถามต่อไปนี้ในสมุดบันทึกวิศวกรรมของคุณ
ตรวจสอบคำถามความเข้าใจของคุณ > ( Google Doc / .docx / .pdf )
เลือก ถัดไป > เพื่อไปยังการสะท้อนหน่วยกลาง