
Lektion 2: Codieren von Förderbändern
Zuvor haben Sie etwas über Förderbänder und Umlenkvorrichtungen gelernt und wie diese einen effizienten Materialtransport in industriellen Umgebungen ermöglichen. Sie haben außerdem erfahren, wie die Förderbänder der CTE-Arbeitszelle funktionieren. Jetzt können Sie mit der Codierung der Förderbänder zum Transport der Datenträger beginnen. In dieser Lektion lernen Sie:
- So konfigurieren Sie einzelne Fördermotoren in VEXcode.
- So erstellen Sie ein VEXcode-Projekt, um Datenträger mithilfe zeitbasierter Bewegungen von einem Förderband auf ein anderes zu verschieben.
Am Ende dieser Lektion werden Sie ein Projekt erstellt, um eine Scheibe vom Eingangsförderband über das Transportförderband bis zum Ausgangsförderband zu transportieren.
Vorbereitungen für die Codierung der Förderbänder
Bevor Sie die Förderbänder auf der CTE-Arbeitszelle codieren können, müssen Sie zur Vorbereitung einige wichtige Aufgaben erledigen. Sie müssen jeden einzelnen Fördermotor in VEXcode konfigurieren. Sie müssen auch den Stapel der Blöcke ändern, die einen kontrollierten Stopp einleiten, um sicherzustellen, dass alle Fördermotoren einbezogen werden.
Konfigurieren einzelner Motoren in VEXcode
Jedes Förderband der CTE-Arbeitszelle wird von einem separaten Motor gesteuert. Aus diesem Grund müssen Sie jeden Motor zur Konfiguration in VEXcode hinzufügen, bevor Sie mit Ihrem Projekt beginnen können. Darüber hinaus müssen Sie sicherstellen, dass jeder Motor die richtige Bezeichnung hat und so eingestellt ist, dass er sich in die für den erfolgreichen Materialtransport erforderliche Richtung dreht.
Konfigurieren des Eingangsfördermotors
Öffnen Sie das Brain CTE 6-Axis Arm Base Template-Projekt.
Hinweis:Eine Erinnerung zum Öffnen von Beispielen in VEXcode EXP finden Sie in der vorherigen Einheit.

Benennen Sie das Projekt in Unit 4 Lesson 2um und speichern Sie es auf Ihrem Gerät.

Öffnen Sie das Gerätefenster.

Wählen Sie Gerät hinzufügen.

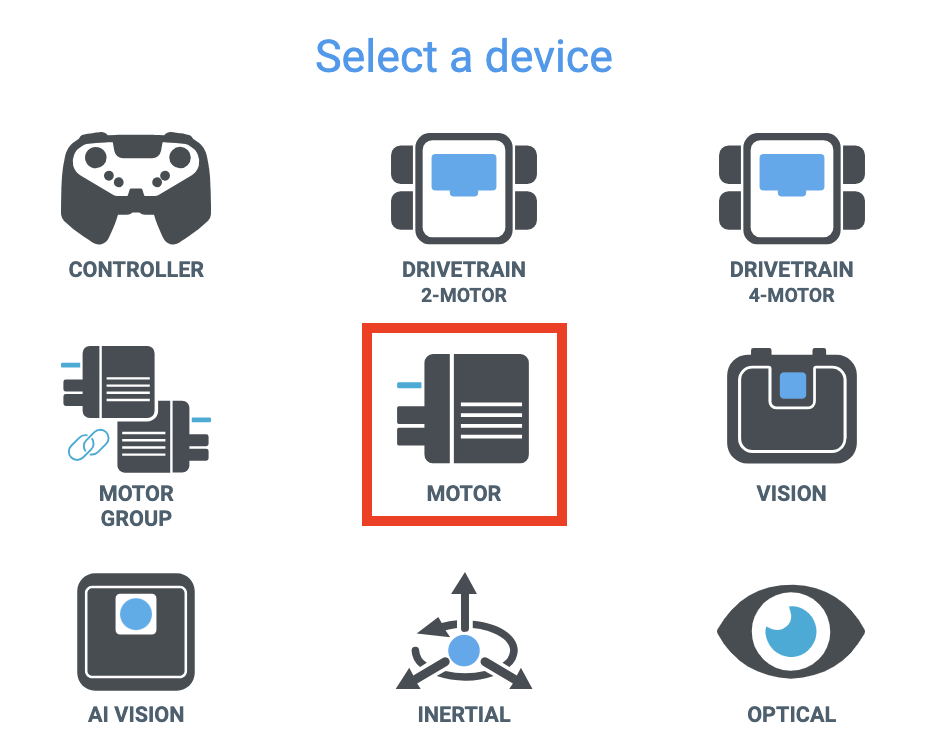
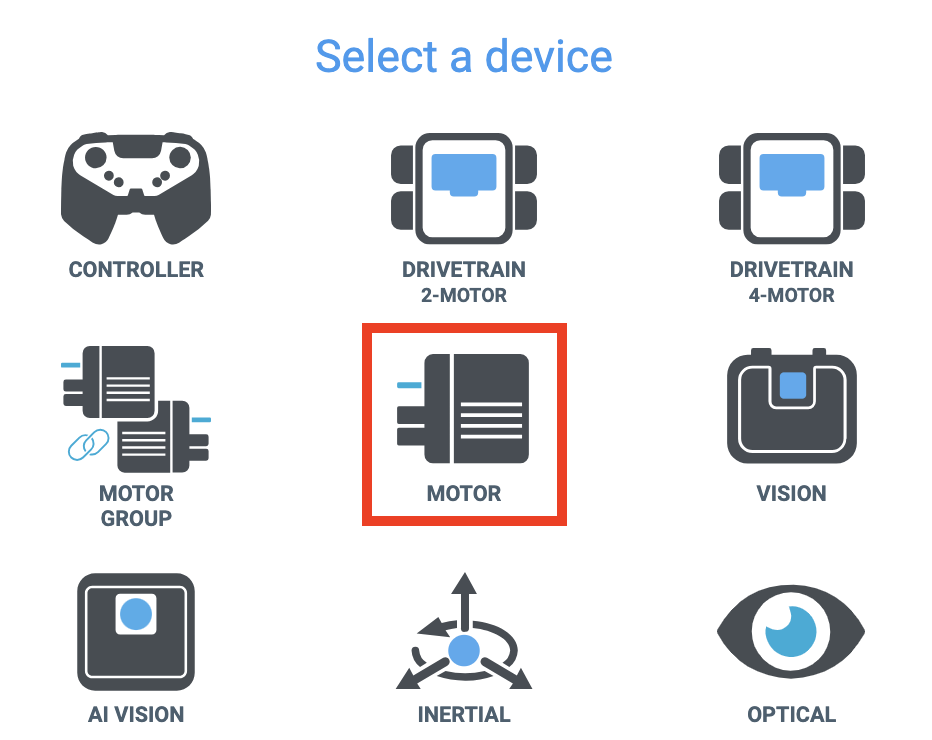
Wählen Sie Motor aus der Geräteliste.
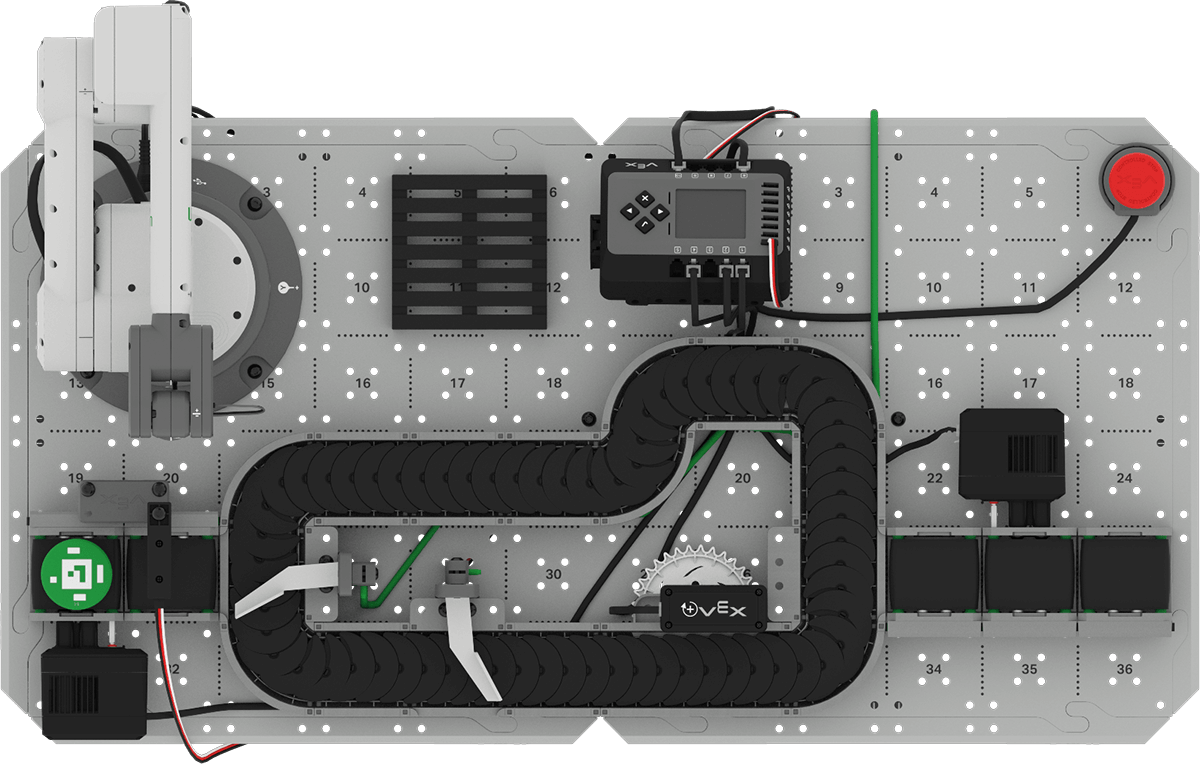
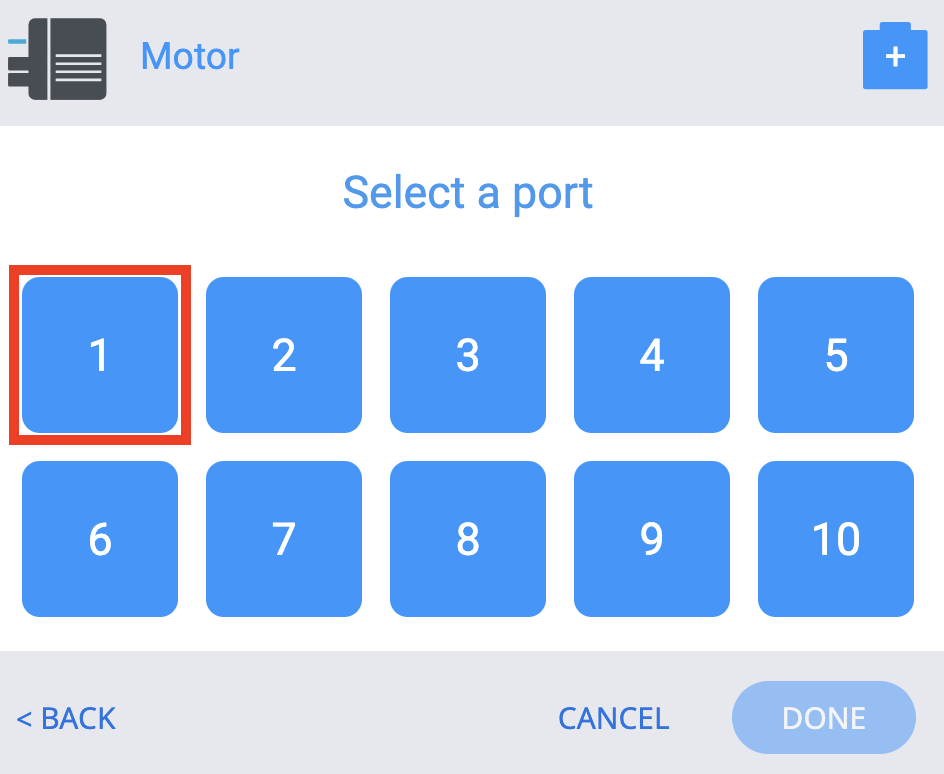
Wählen Sie Port 1 am Brain entsprechend dem Port, an den der Eingangsfördermotor angeschlossen ist.
Hinweis:Stellen Sie sicher, dass der Eingangsfördermotor an Port 1 des Brain angeschlossen ist.
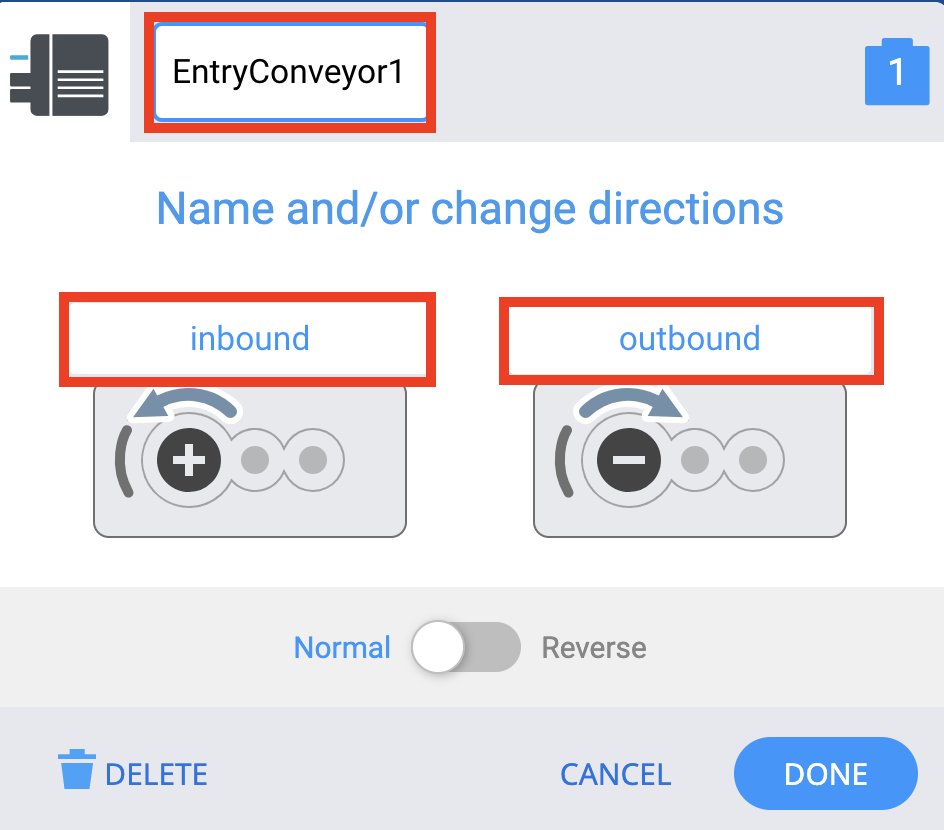
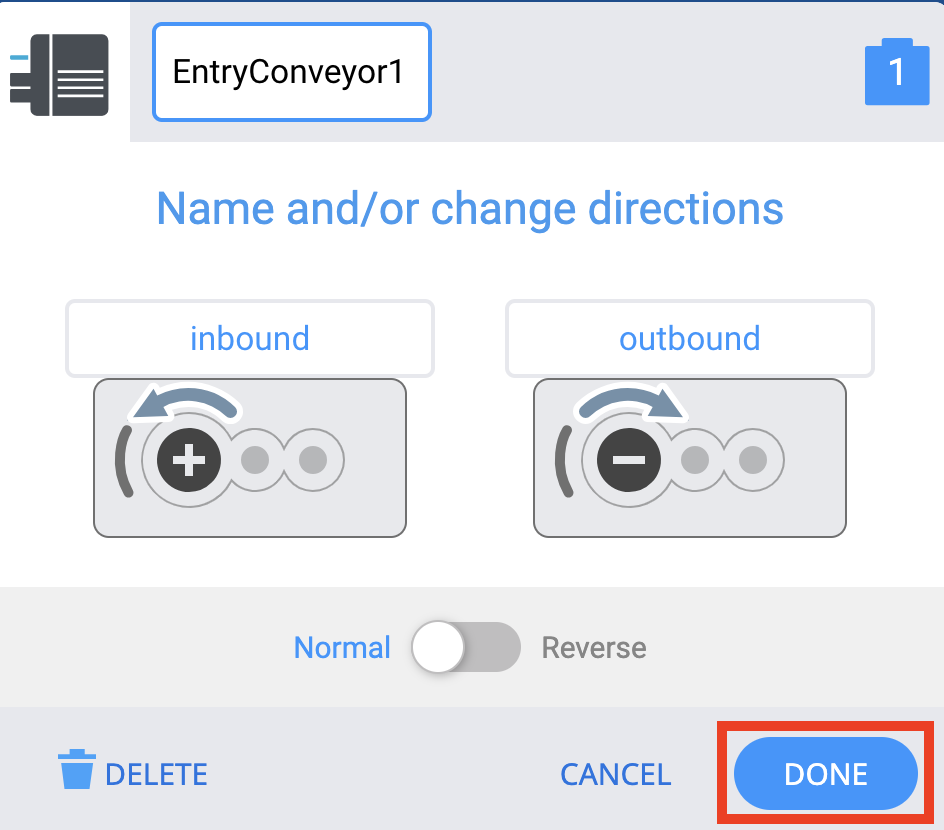
Bearbeiten Sie die Beschriftungen, damit sie zu diesem Bild passen.
- Der Motor sollte umbenannt werden, um ihn eindeutig als Eingangsfördermotor zu identifizieren. Die Nummer im Namen bezieht sich auf den Port, an den es angeschlossen ist.
- Die Richtungen des Motors sollten ebenfalls in eingehend und ausgehendumbenannt werden, da die Standardbezeichnungen vorwärts und rückwärtsdie Bewegung der Förderbänder nicht ausreichend beschreiben.
Eingehend bedeutet, dass sich das Eingangsförderband in Richtung des Transportförderbands dreht. Ausgehendbedeutet, dass sich das Eingangsförderband vom Transportförderband weg dreht .
Auswählen Fertig.
Konfigurieren des Ausgangsfördermotors
Der Ausgangsfördermotor kann auf die gleiche Weise wie der Eingangsfördermotor konfiguriert werden.
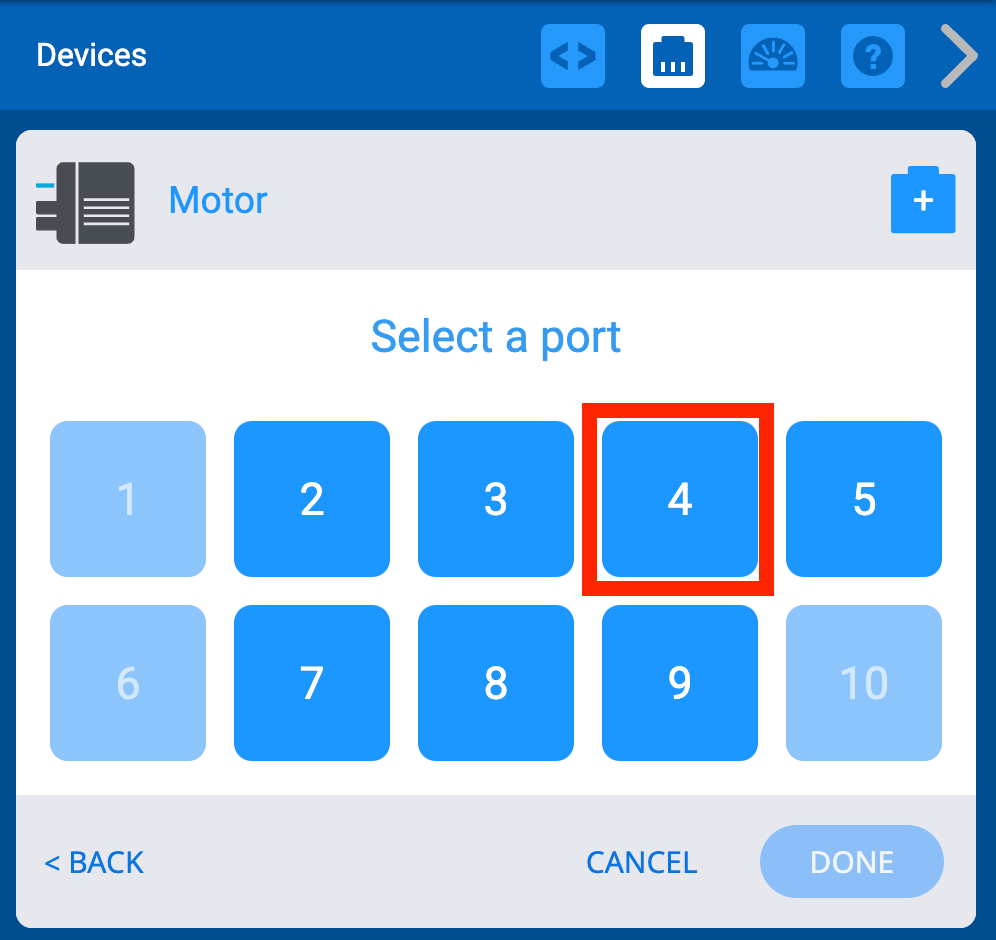
Wählen Sie im Gerätefenster Motor aus der Geräteliste aus.

Wählen Sie Port 4 entsprechend dem Port, an den der Ausgangsförderermotor angeschlossen ist.
Hinweis:Stellen Sie sicher, dass der Motor des Ausgangsförderbands an Port 4 des Brain angeschlossen ist.
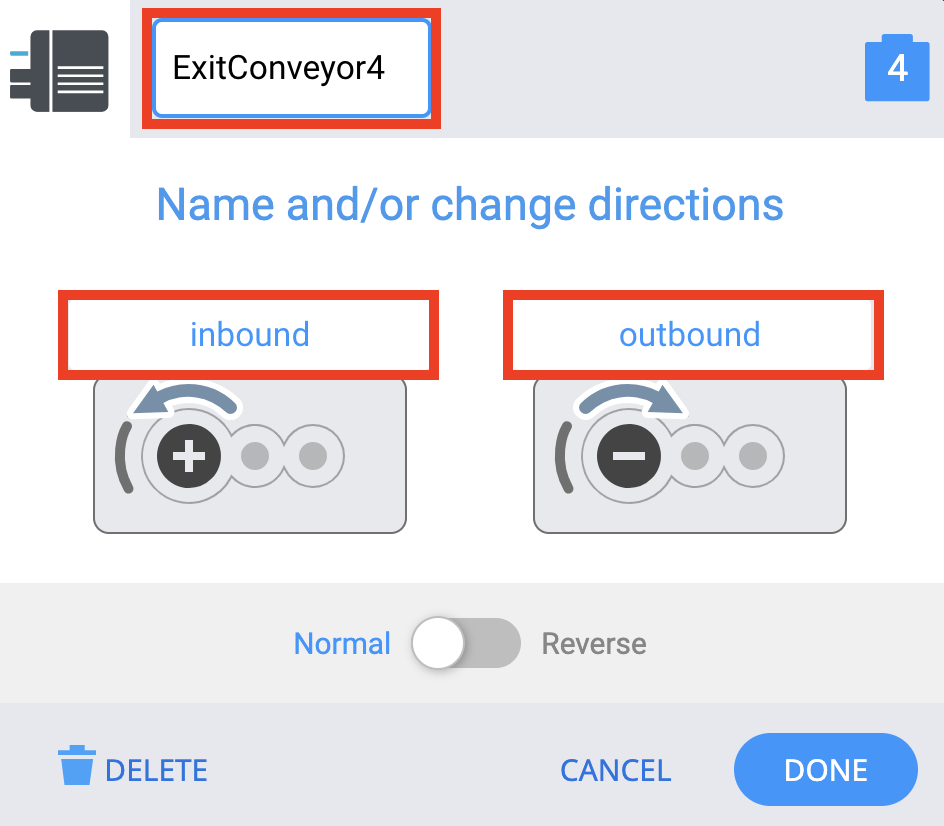
Bearbeiten Sie die Beschriftungen so, dass sie mit denen im Bild übereinstimmen.
- Der Motor sollte umbenannt werden, um ihn eindeutig als Ausgangsfördermotor zu identifizieren. Die Nummer im Namen bezieht sich auf den Port, an den es angeschlossen ist.
- Die Richtungen des Motors sollten ebenfalls ineingehend,undausgehend,umbenannt werden, wie Sie es zuvor für das Eingangsförderband getan haben.
Eingehendbedeutet, dass sich das Ausgangsförderbandin Richtungdes Transportförderbands dreht. Ausgehendbedeutet, dass sich das Ausgangsförderbandvom Transportförderband weg dreht.
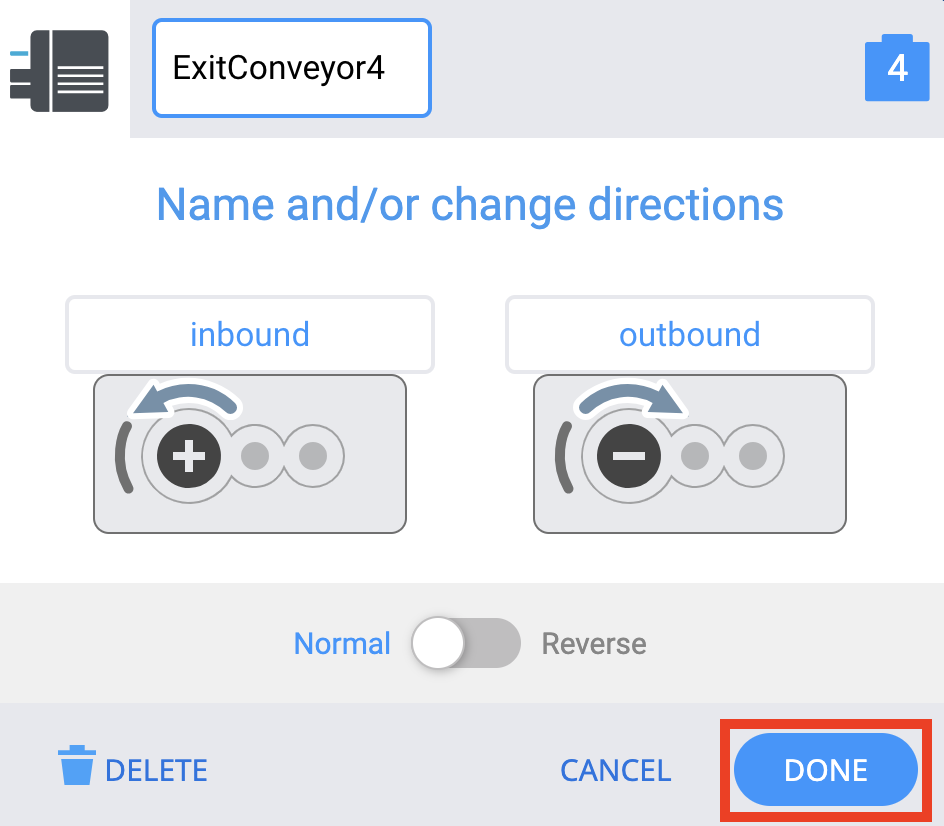
Auswählen Fertig.
Konfigurieren des Transportbandmotors
Schließlich müssen Sie den Transportfördermotor konfigurieren. Außerdem müssen Sie die Laufrichtung des Motors umkehren, damit sich das Förderband in die gewünschte Richtung bewegt.
Wählen Sie im Gerätefenster Motor aus der Geräteliste aus.
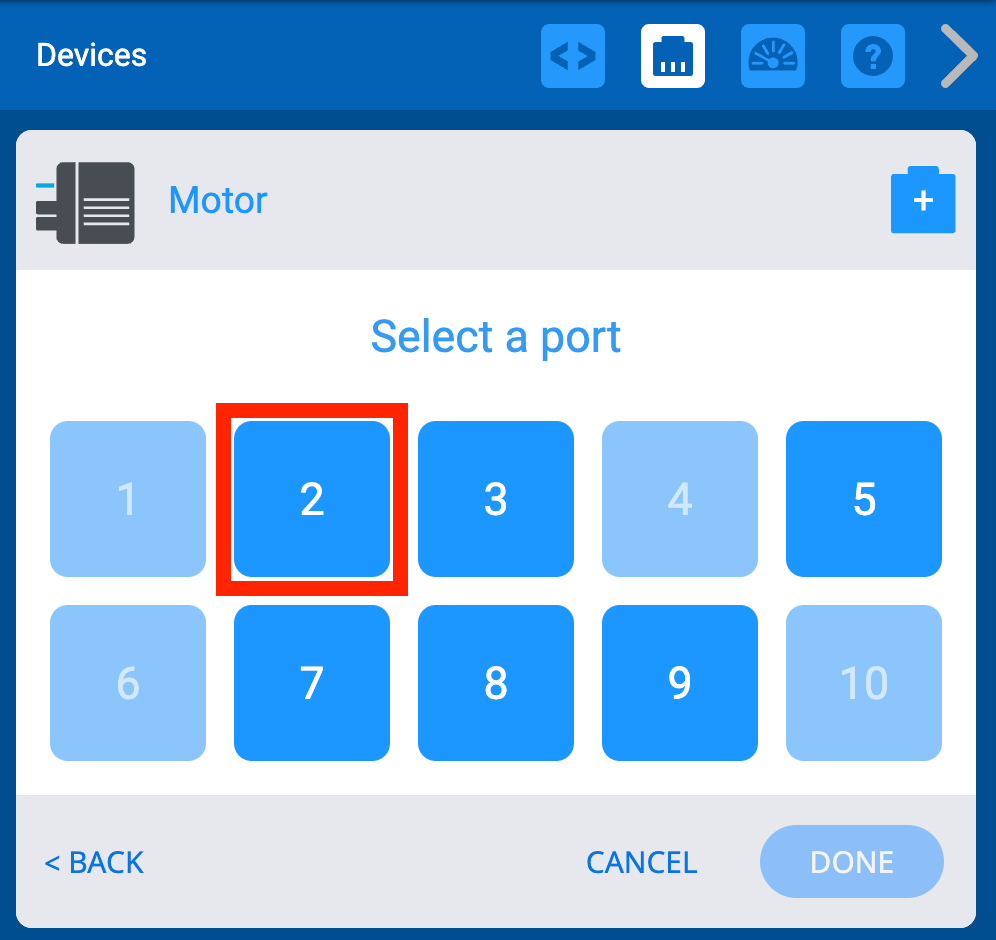
Wählen Sie Port 2 entsprechend dem Port, an den der Transportfördermotor angeschlossen ist.
Hinweis:Stellen Sie sicher, dass der Transportfördermotor an Port 2 des Brain angeschlossen ist.
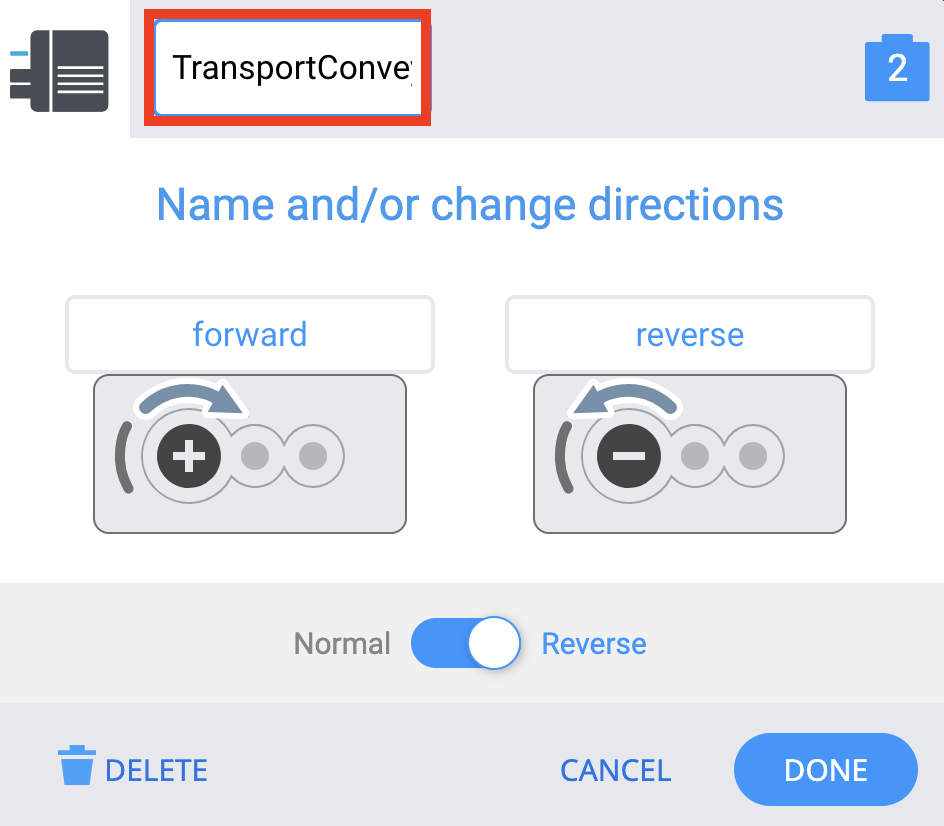
Benennen Sie den Motor um in TransportConveyor2.
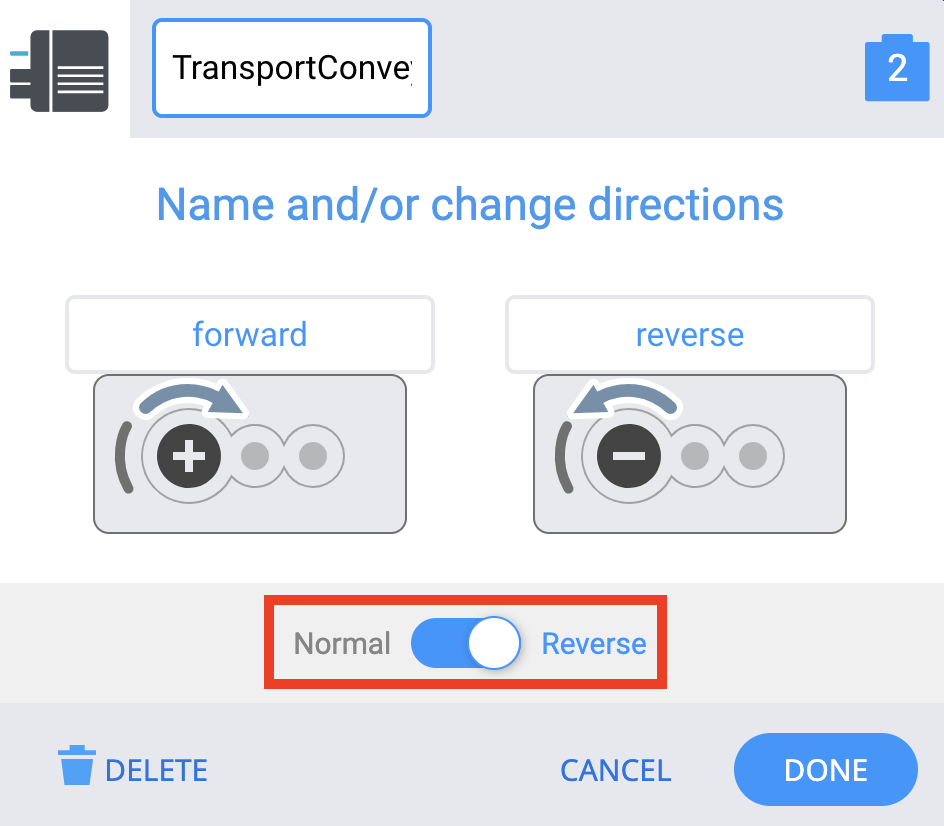
Damit das Transportförderband Materialien in die richtige Richtung bewegt, müssen Sie den Umschaltknopf auswählen, um die Motorrichtung von (Normal auf (Rückwärtszu ändern.
Richtung des Transportfördermotors
Beim Konfigurieren des Transportfördermotors mussten Sie seine Richtung umkehren. Dies liegt daran, dass der Motor das Transportförderband standardmäßig im Uhrzeigersinn dreht. Sie können die Standarddrehrichtung eines Motors anhand der Bezeichnung des Motors bestimmen.
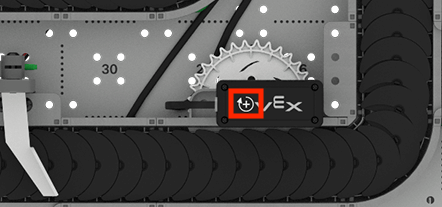
Oben auf jedem Motor befindet sich ein Symbol, das angibt, welche Richtung positiv ist. Beim Transportband zeigt der Pfeil im Uhrzeigersinn. Dies bedeutet, dass standardmäßig jede auf dem Transportförderband platzierte Scheibe vom Eingangsförderband zum ersten Umleiter rotiert. Durch Umkehren der Motorrichtung in der Konfiguration stellen Sie sicher, dass die Richtung vorwärtsdem besprochenen richtigen Weg entlang des Förderbands entspricht.
Kontrollierten Stopp ändern
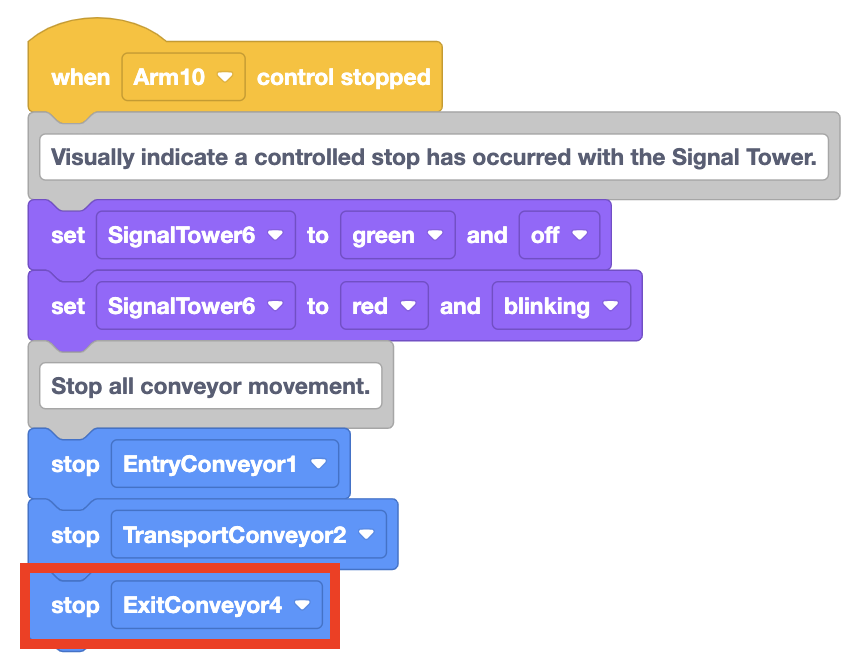
Nachdem Sie nun alle Fördermotoren konfiguriert haben, müssen Sie den kontrollierten Stopp aktualisieren. Wenn ein kontrollierter Stopp ausgelöst wird, sollten alle Motoren aufhören zu laufen, sodass Sie sicher sein können, dass die CTE Workcell Base sicher bewegt werden kann. Sie werden dem Hutblockbei gesteuertem StoppBlöcke hinzufügen, um diese Förderbandmotoren zu stoppen.
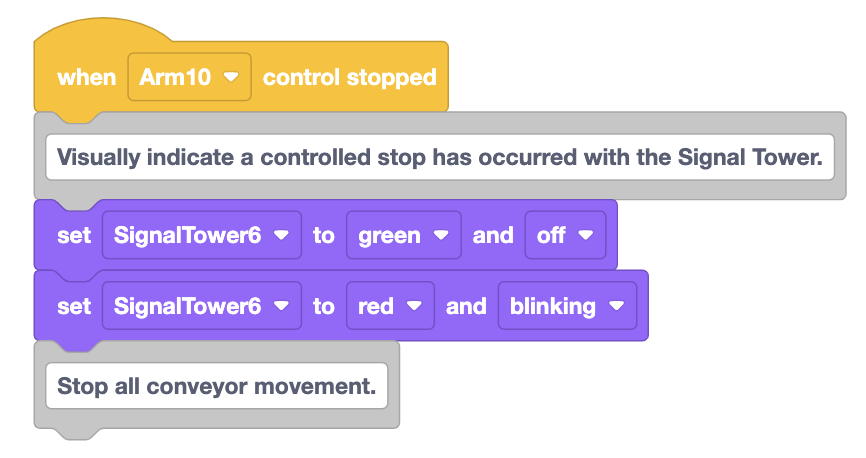
Erstellen Sie einen Kommentar um das erforderliche Förderbandverhalten während eines kontrollierten Stopps zu beschreiben.

Fügen Sie den BlockKommentar zum vorhandenen Blockstapel hinzu.
Ziehen Sie einen Stopp-Motor Block heraus, um das Eingangsförderband anzuhalten, und befestigen Sie ihn am Blockstapel.
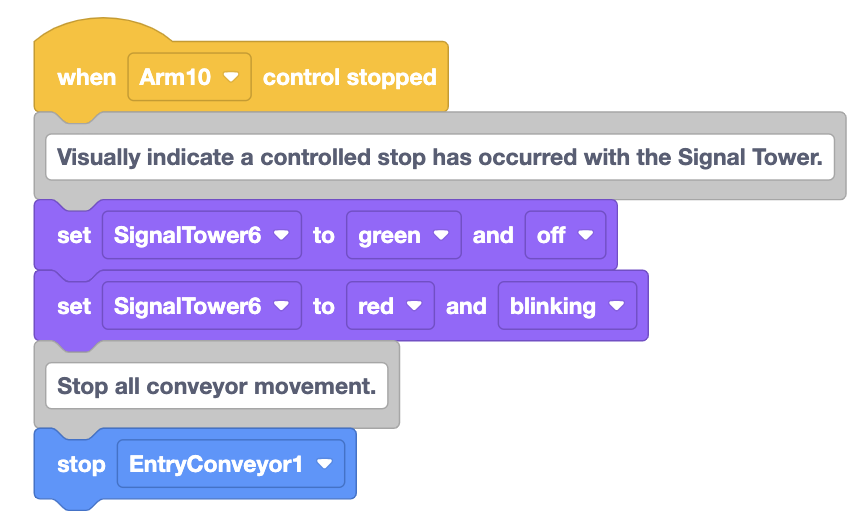
Ziehen Sie einen weiteren Block Stop Motor heraus und befestigen Sie ihn an der Unterseite des Blockstapels.
Wählen Sie den Pfeil aus, um das Dropdown-Menü zu öffnen, und wählen Sie „TransportConveyor2“ aus, um den Parameter so einzustellen, dass das Transportförderband in einem kontrollierten Stopp angehalten wird.
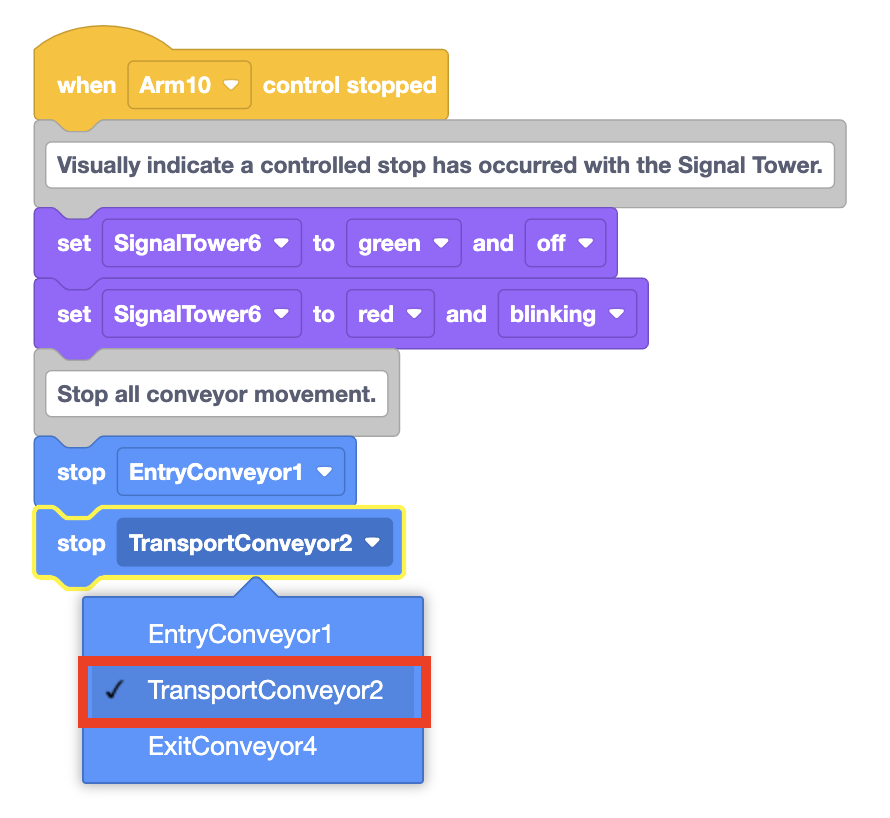
Fügen Sie dem Stapel einen dritten Block Stop Motor “ hinzu. Ändern Sie den Parameter in „ExitConveyor4“.
Erstellen eines Projekts zum Transportieren einer Festplatte mithilfe von Förderbändern
Nachdem Sie nun Ihre Förderbandmotoren konfiguriert und den kontrollierten Stopp geändert haben, können Sie mit dem Aufbau eines Projekts zum Transport einer Scheibe mithilfe der Förderbänder beginnen. Sie beginnen mit dem Aufbau eines Projekts für die Bewegung der Scheibe vom Eingangsförderband über das Transportförderband zum Ausgangsförderband. Dazu muss die Bewegung der Scheibe entlang der Förderbänder sorgfältig koordiniert werden. Eine Möglichkeit, diese Koordination zu erreichen, besteht darin, ein Projekt mit zeitbasierten Bewegungen zu erstellen, wie im folgenden Video gezeigt.
Zeitbasierte Bewegungen
Durch Verwendung einer Kombination aus den Blöcken Warten, Drehenund Motor stoppen können Sie ein Projekt erstellen, bei dem jedes Förderband zum richtigen Zeitpunkt startet und stoppt, um eine Scheibe von einem Förderband zum nächsten zu übertragen. Diese Art der Codierung der Förderbänder wird als zeitbasierte Bewegungen bezeichnet.
Erstellen des Projekts
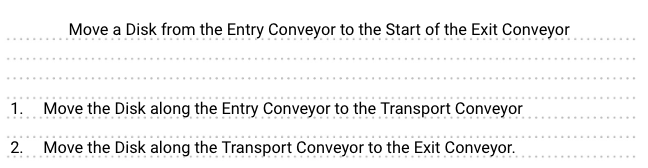
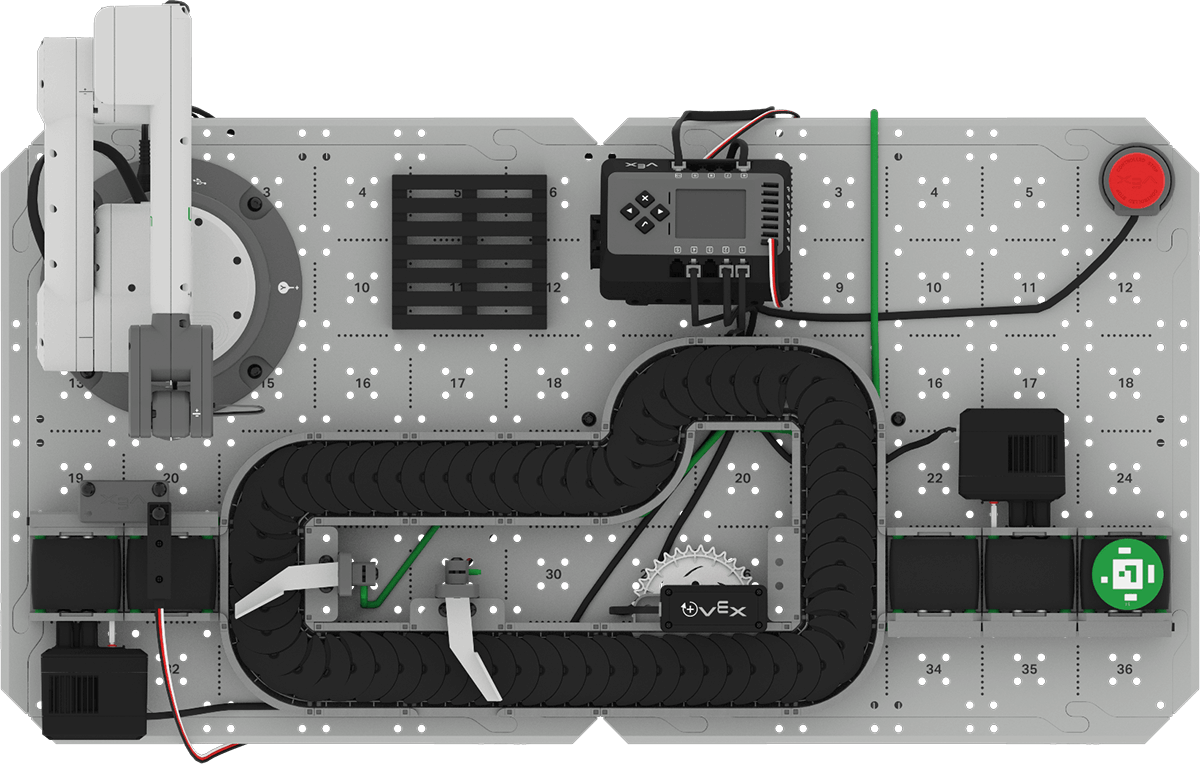
Notieren Sie die zum Verschieben der Festplatte erforderlichen Planungsschritte, wie sie im Bild hier gezeigt werden, in Ihrem technischen Notizbuch.
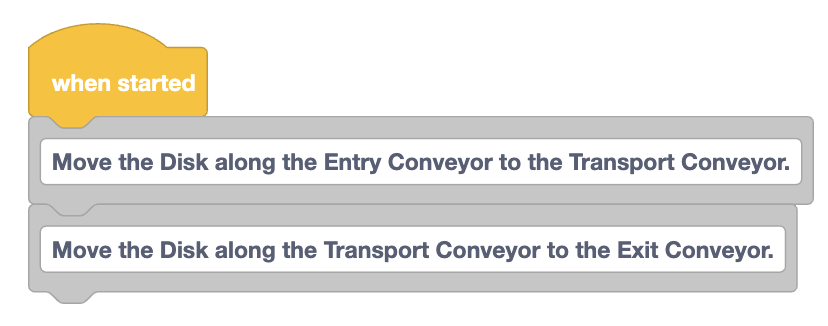
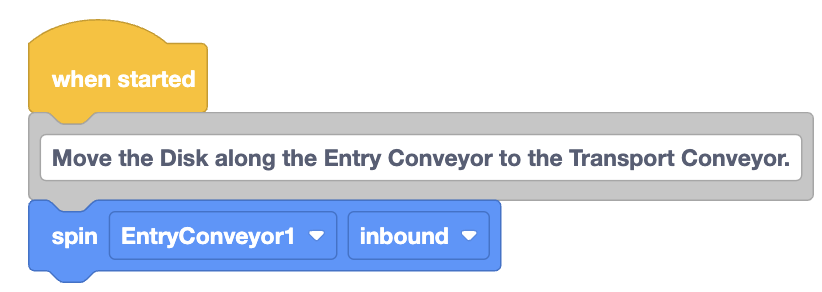
Erstellen Sie für jeden Schritt Ihres Plans „Kommentar -Blöcke und hängen Sie sie an den Block „Beim Start an.
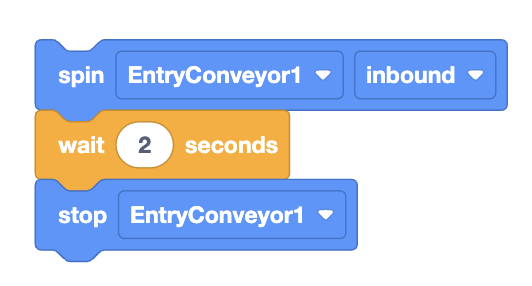
Fügen Sie einen SpinBlock unter den ersten Kommentarenein.
Die Scheibe startet auf dem Eingangsförderband und bewegt sich in Richtung des Transportförderbands, daher können die Parameter auf „Eingangsförderband1“ und „eingehend“ eingestellt bleiben.
Der BlockSpinlässt den Motor endlos rotieren, bis er den Befehl erhält, den Motor anzuhalten.
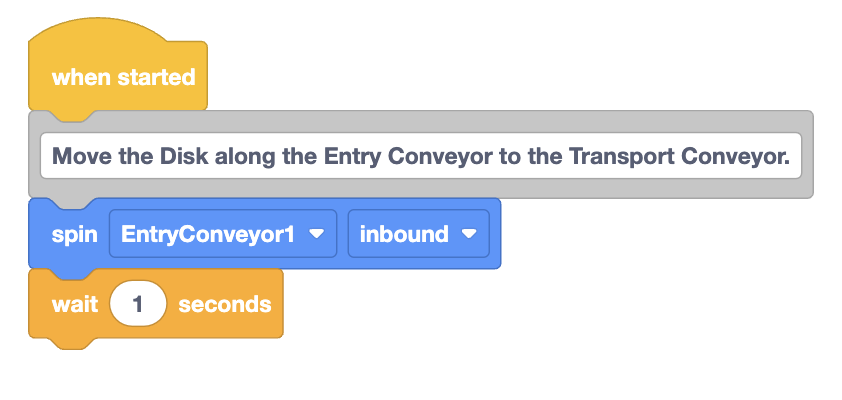
Fügen Sie als Nächstes einen Wait- Block an.
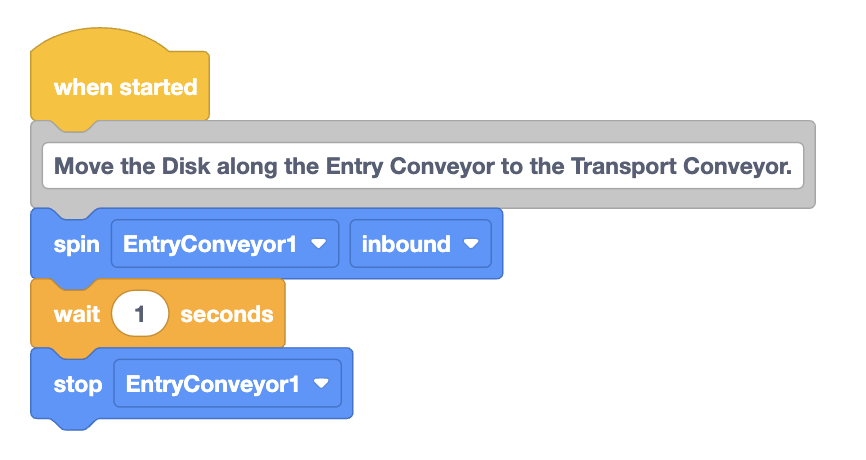
Befestigen Sie einen Stopp-MotorBlock an der Unterseite des Blockstapels. Stellen Sie sicher, dass der Parameter auf „EntryConveyor1“ eingestellt ist.
Machen Sie eine Vorhersage darüber, was Ihrer Meinung nach passieren wird, wenn das Projekt ausgeführt wird. Notieren Sie es in Ihrem technischen Notizbuch.
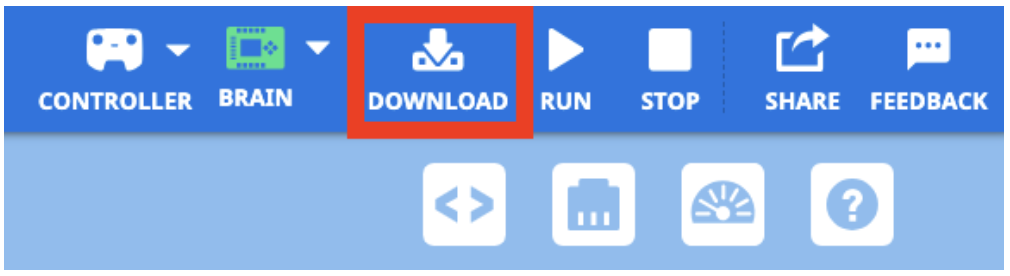
Stellen Sie sicher, dass das Brain mit VEXcode verbunden ist, und laden Sie das Projekt auf das Brain herunter.
Stellen Sie sicher, dass sich am Anfang des Eingangsförderers eine grüne Scheibe befindet, wie hier gezeigt. Drücken Sie die Taste Check auf dem Brain, um das Projekt testweise auszuführen.
Beobachten Sie das Verhalten des Förderbands. Transportiert es die Scheibe bis zum Ende des Eingangsförderers? Warum oder warum nicht?
Wenn das Förderband zum Stillstand gekommen ist, drücken Sie die Taste x auf dem Brain, um das Projekt zu stoppen. Notieren Sie Ihre Beobachtungen in Ihrem technischen Notizbuch.

Taktung des Förderbands
Beim Ausführen Ihres Projekts ist Ihnen wahrscheinlich aufgefallen, dass das Eingangsförderband die Scheibe nicht bis zum Transportförderband bewegt hat. Dies liegt daran, dass der Parameter im Block Warten nur auf 1 Sekunde eingestellt ist. Es wird mehr Zeit benötigt, damit sich das Eingangsförderband dreht, bevor der Block Stoppmotorausgeführt wird.
Wenn Sie ein Projekt mit zeitbasierten Bewegungen erstellen und testen, müssen Sie den Parameter im Block Warten möglicherweise mehr als einmal anpassen, um das richtige Timing zu erreichen.
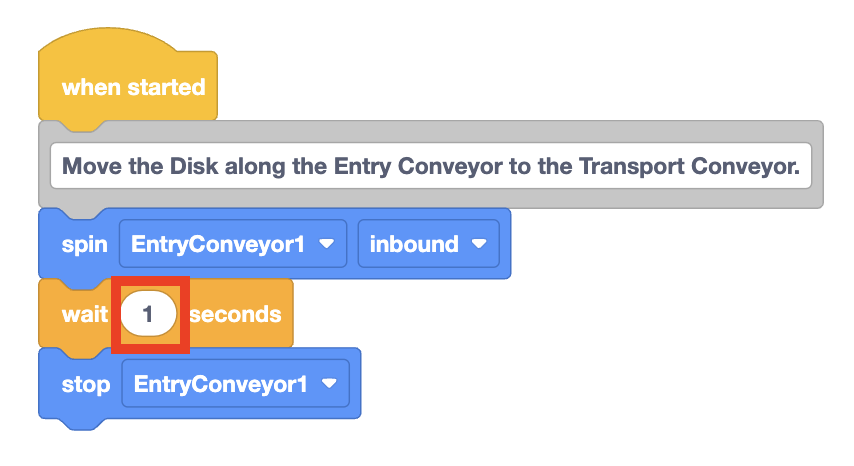
Passen Sie den Parameter im Block warten“ auf 7 Sekunden an, laden Sie das Projekt herunter und führen Sie es zum Testen erneut aus.
Hat das Eingangsförderband die Scheibe bis zum Ende transportiert, wo sie vom Transportförderband abgeholt werden konnte? Wenn nicht, passen Sie den Parameter erneut an, bis der Wert stimmt.
Hinweis:Die im Parameter benötigte Sekundenanzahl kann variieren. Verwenden Sie Nummern, die für Ihre CTE Workcell Base zuverlässig funktionieren.
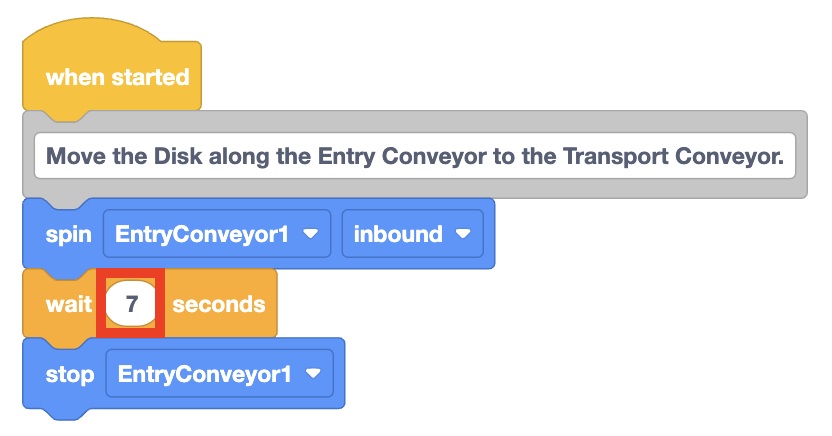
Fügen Sie die Blöcke hinzu, die zum Bewegen der Scheibe entlang des Transportförderers erforderlich sind.
Beachten Sie, dass dies dieselben Blöcke sind, die für das Eingangsförderband verwendet werden, nur dass die Parameter auf „TransportConveyor2“ und „forward“ eingestellt sind.
Laden Sie das Projekt auf das Brain herunter und führen Sie es zum Testen aus. Bewegt sich die Scheibe entlang des gesamten Transportförderers und hält sie an der Umlenkung an? Wenn nicht, passen Sie den Parameter des Blocks Wartenan, bis dies der Fall ist.
Zu Ihrer Information
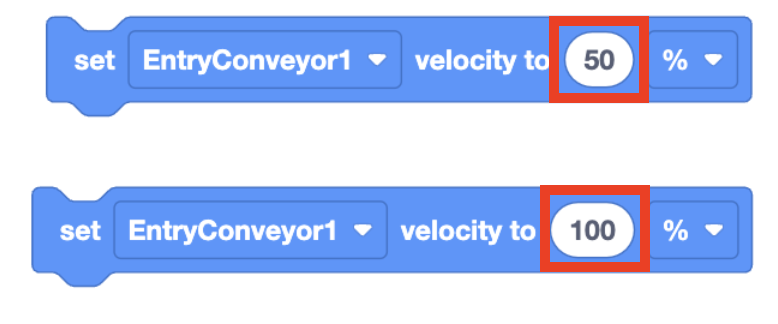
Die Geschwindigkeit, mit der Objekte auf einem Förderband laufen, kann mit dem Block Motorgeschwindigkeit einstellen geändert werden. Der Parameter im Block kann geändert werden, um das Förderband schneller oder langsamer drehen zu lassen. Die Standardfördergeschwindigkeit beträgt 50 % und die Maximalgeschwindigkeit 100 %.
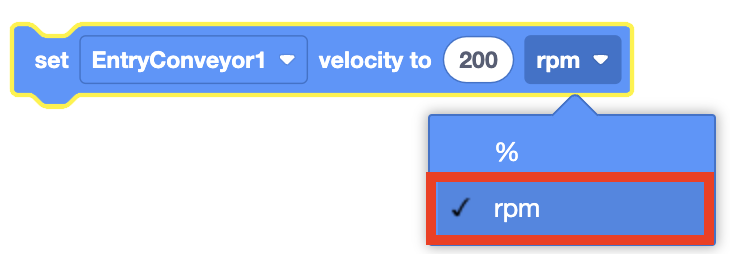
Der Blockparameter Motorgeschwindigkeit einstellen“ kann auch mithilfe der U/min oder Umdrehungen pro Minute eingestellt werden.
Aktivität
Nachdem Sie nun zeitbasierte Bewegungen zum Codieren der Förderbänder verwendet haben, um eine Scheibe vom Eingangsförderband und entlang des Transportförderbands zum Ausgangsförderband zu bewegen, werden Sie in Ihrem Projekt weiter daran arbeiten, die Scheibe an das Ende des Ausgangsförderbands zu bewegen, ohne vom Ende des Förderbands zu fallen.
Einrichtung:Platzieren Sie eine Scheibe am Anfang des Eingangsförderers, wie unten gezeigt.
Aktivität: Erstellen Sie ein VEXcode-Projekt, das eine Diskette vom Eingangsförderband über das Transportförderband zum Ende des Ausgangsförderbands transportiert.
- Planen Sie, wie Sie Ihr Projekt weiterentwickeln werden, um die Scheibe an das Ende des Ausgangsförderers zu bewegen.
- Dokumentieren Sie Ihren Plan in Ihrem technischen Notizbuch.
- Benennen Sie Ihr Projekt in Einheit 4, Lektion 2, Aktivität um und speichern Sie es auf Ihrem Gerät, bevor Sie mit der Bearbeitung des Projekts beginnen.
- Bearbeiten Sie das Projekt in VEXcode, damit es dem Plan entspricht, auf den sich Ihre Gruppe geeinigt hat.
- Platzieren Sie eine Diskette am Startpunkt des Eingangsförderers und führen Sie das Projekt aus. Bewegen die Förderbänder die Scheibe zum Ende des Ausgangsförderers, ohne herunterzufallen? Beenden Sie das Projekt, wenn die Förderbänder fertig sind, und zeichnen Sie Ihre Beobachtungen in Ihrem technischen Notizbuch auf.
- Wenn die Scheibe vom Ende des Ausgangsförderbands fällt, bearbeiten Sie Ihr Projekt, bis eine Scheibe bis zum Ende des Förderbands gelangt, ohne herunterzufallen. Dokumentieren Sie sämtliche Änderungen in Ihrem technischen Notizbuch.
Überprüfen Sie Ihr Verständnis
Bevor Sie mit der nächsten Lektion fortfahren, stellen Sie sicher, dass Sie die Konzepte dieser Lektion verstehen, indem Sie die folgenden Fragen in Ihrem technischen Notizbuch beantworten.
Überprüfen Sie Ihre Verständnisfragen > ( Google Doc / .docx / .pdf )
Wählen Sie Weiter > , um zur Mid Unit Reflection zu gelangen.