
Lição 2: Codificação dos Transportadores
Anteriormente, aprendeu sobre transportadores e desviadores e como estes permitem o transporte eficiente de materiais em ambientes industriais. Também aprendeu sobre como funcionam os transportadores na Célula de Trabalho CTE. Agora está pronto para começar a codificar os transportadores para transportar discos. Nesta lição, aprenderá:
- Como configurar motores de transportadores individuais no VEXcode.
- Como criar um projeto VEXcode para mover discos de uma passadeira para outra utilizando movimentos baseados no tempo.
No final desta lição, irá criar um projeto para transportar um disco desde o transportador de entrada, passando pelo transportador de transporte até ao transportador de saída.
Preparar-se para codificar os transportadores
Antes de codificar os transportadores na CTE Workcell, existem algumas tarefas importantes que deve completar para se preparar. Terá de configurar cada motor transportador individual no VEXcode. Também terá de modificar a pilha de blocos que inicia uma paragem controlada, para garantir que todos os motores do transportador estão incluídos.
Configurar motores individuais no VEXcode
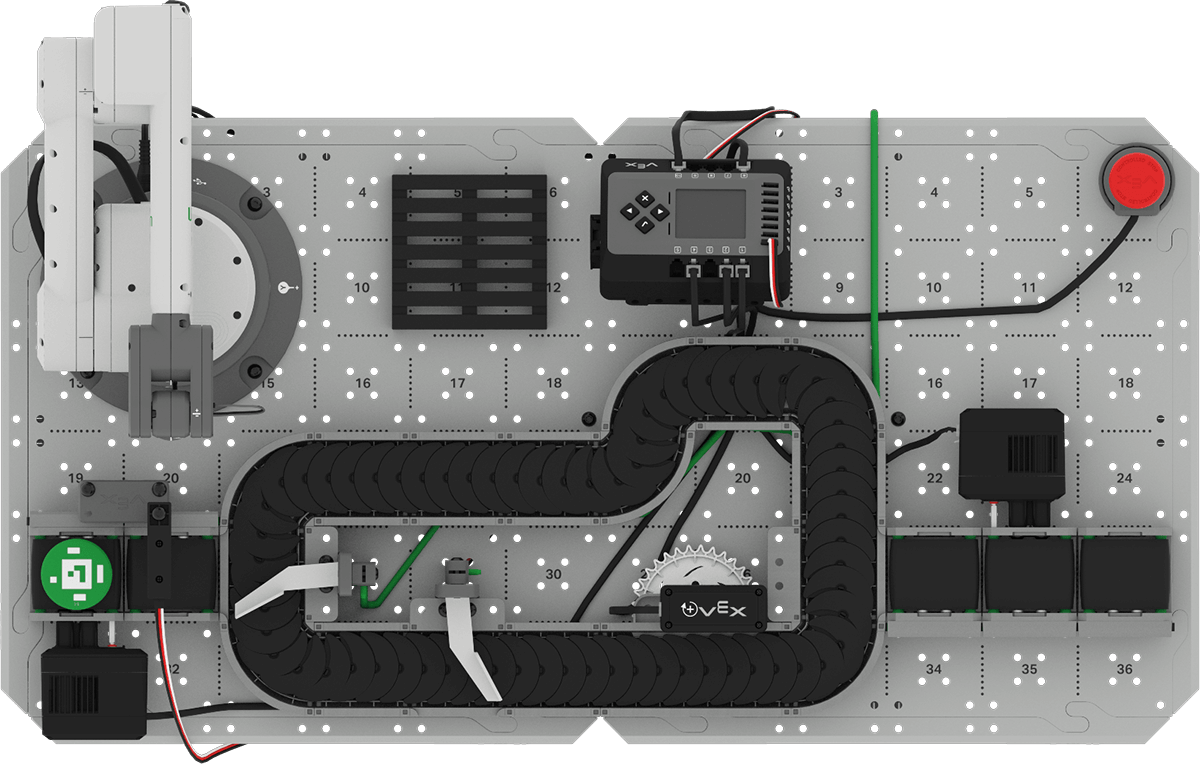
Cada transportador na Célula de Trabalho CTE é controlado por um motor separado. Por este motivo, terá de adicionar cada motor à configuração no VEXcode antes de iniciar o seu projeto. Além disso, terá de ter a certeza de que cada motor está nomeado corretamente e que está configurado para rodar na direção necessária para transportar materiais com sucesso.
Configurar o motor do transportador de entrada
Abra o projeto Brain CTE 6-Axis Arm Base Template.
Nota:Para obter um lembrete sobre como abrir Exemplos no VEXcode EXP, consulte a Unidade anterior.

Renomeie o projeto para Unidade 4 Lição 2e guarde-o no seu dispositivo.

Abra a janela Dispositivos.

Selecione Adicionar um dispositivo.

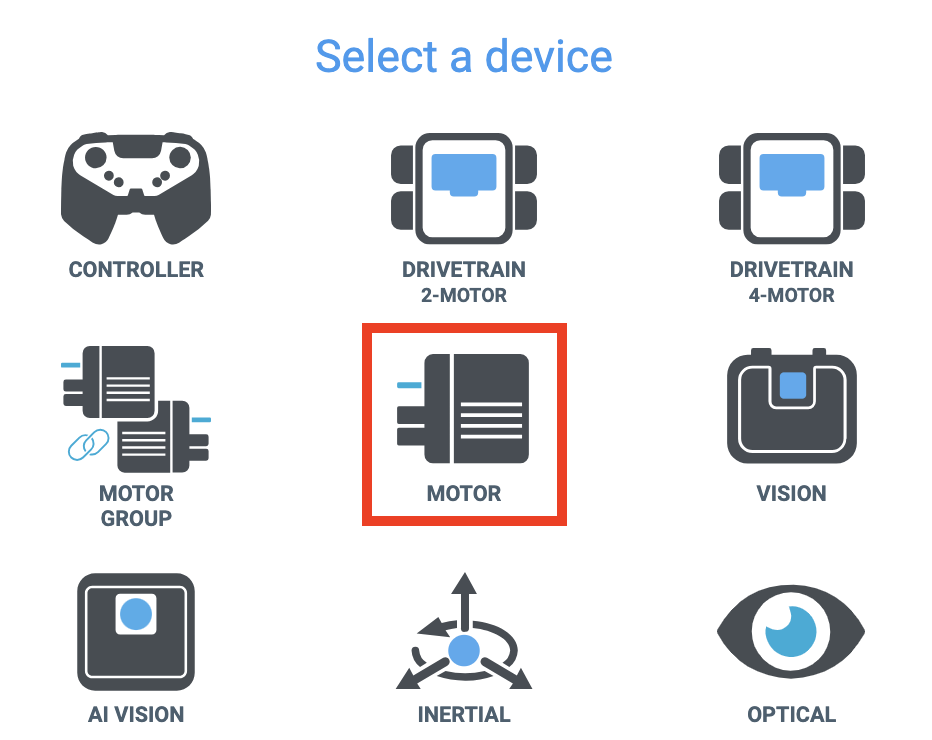
Selecione Motor na lista de Dispositivos.
Selecione a porta 1 no Brain para corresponder à porta na qual o motor do transportador de entrada está ligado.
Nota:Certifique-se de que o motor do transportador de entrada está ligado à porta 1 do Brain.
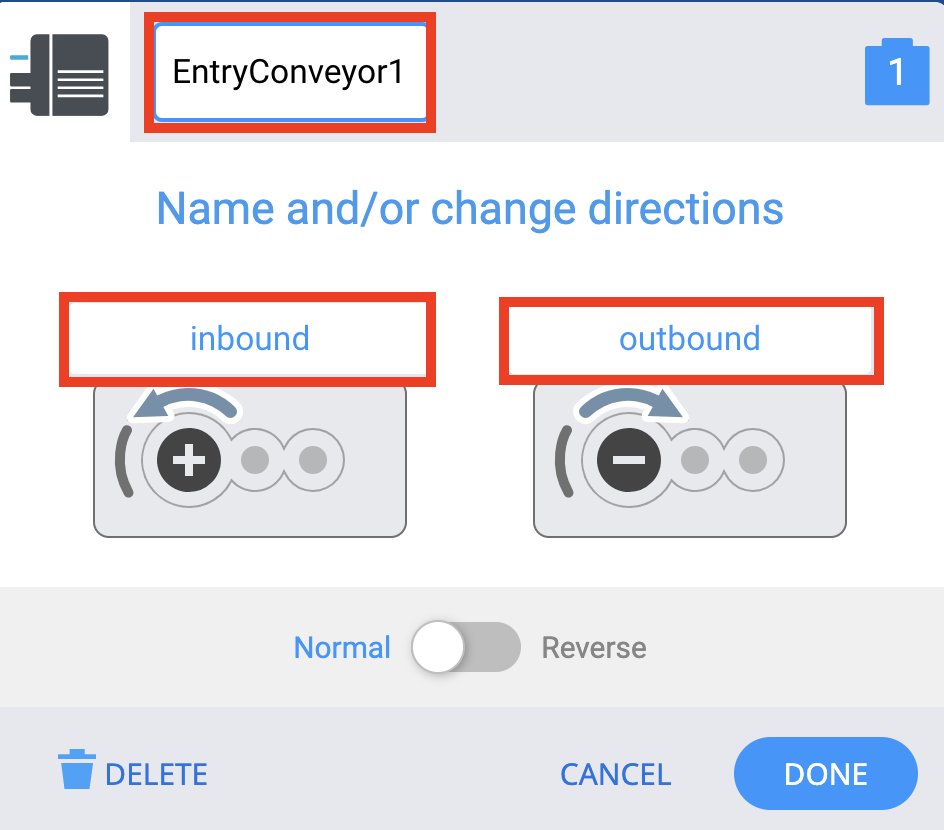
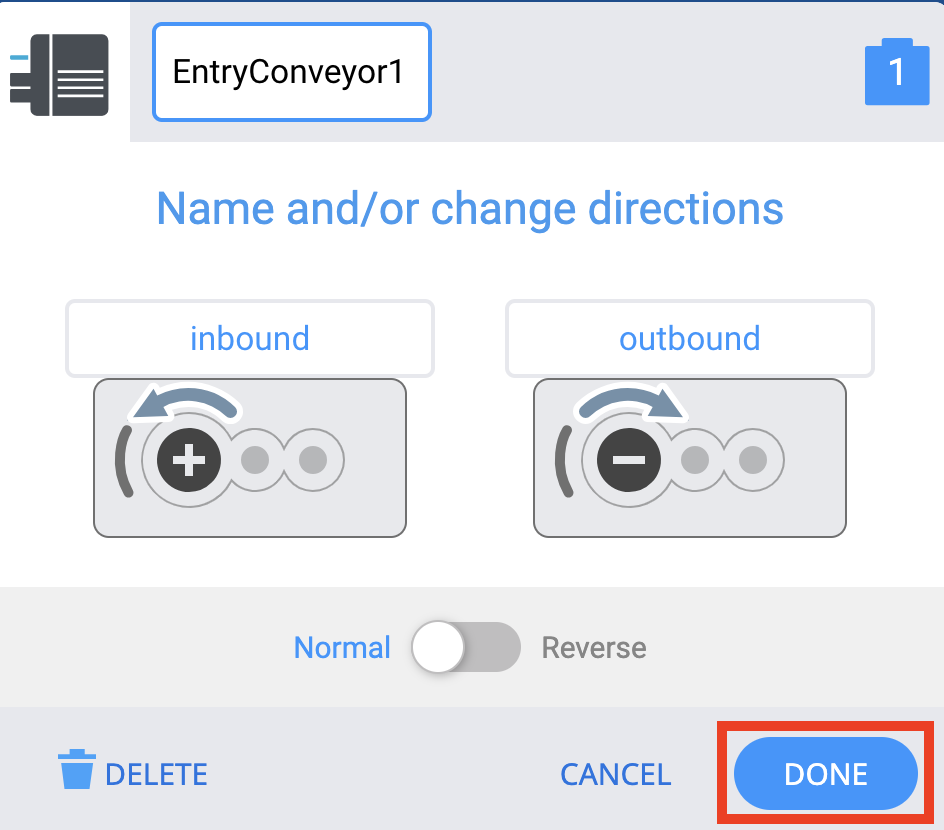
Edite os rótulos para corresponder a esta imagem.
- O motor deve ser renomeado para o identificar claramente como motor do transportador de entrada. O número no nome faz referência à porta na qual está ligado.
- As direções do motor também devem ser renomeadas para entrada e saída, uma vez que as etiquetas padrão para a frente e para trásnão descrevem adequadamente o movimento dos transportadores.
Entrada significa que o Transportador de Entrada está a rodar em direcção ao Transportador de Transporte. Saídasignifica que o Transportador de Entrada está a rodar para longe do Transportador de Transporte.
Selecione Concluído.
Configurar o motor do transportador de saída
O motor do transportador de saída pode ser configurado da mesma forma que o motor do transportador de entrada.
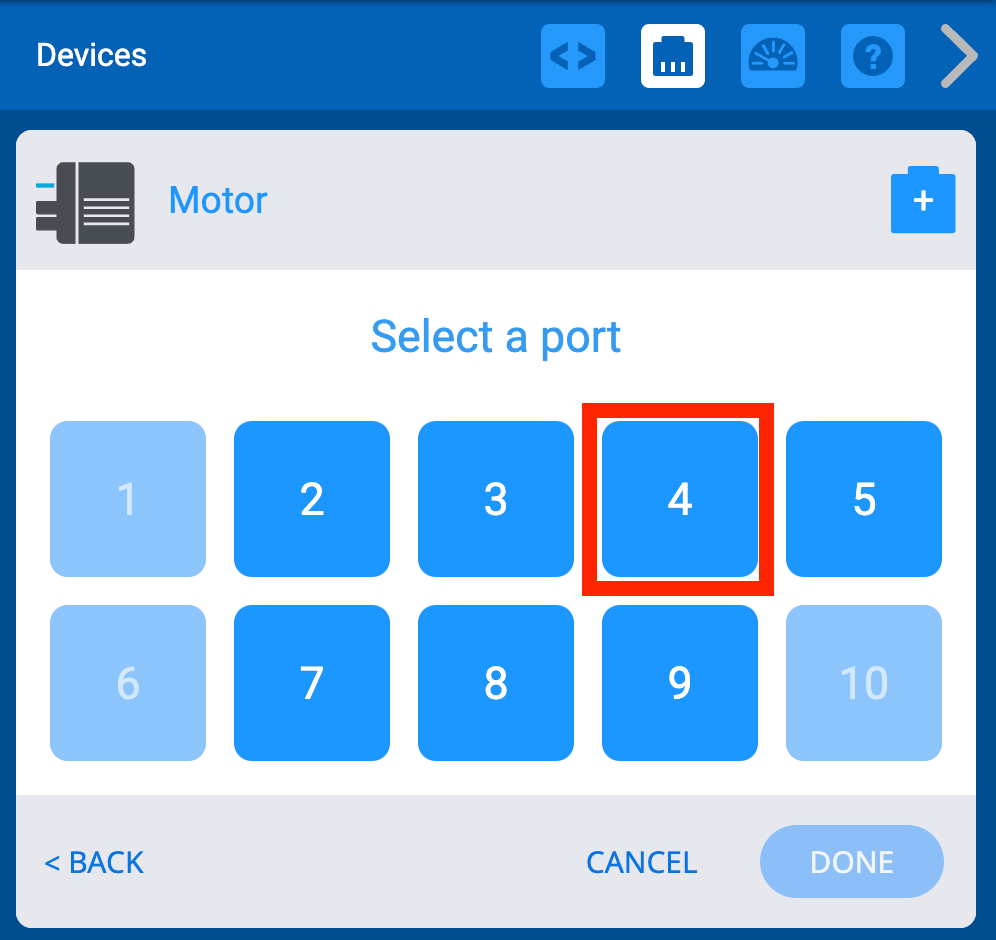
Na janela Dispositivos, seleccione Motor na lista de dispositivos.

Selecione a porta 4 para corresponder à porta na qual o motor do transportador de saída está ligado.
Nota:Certifique-se de que o motor do transportador de saída está ligado à porta 4 do Brain.
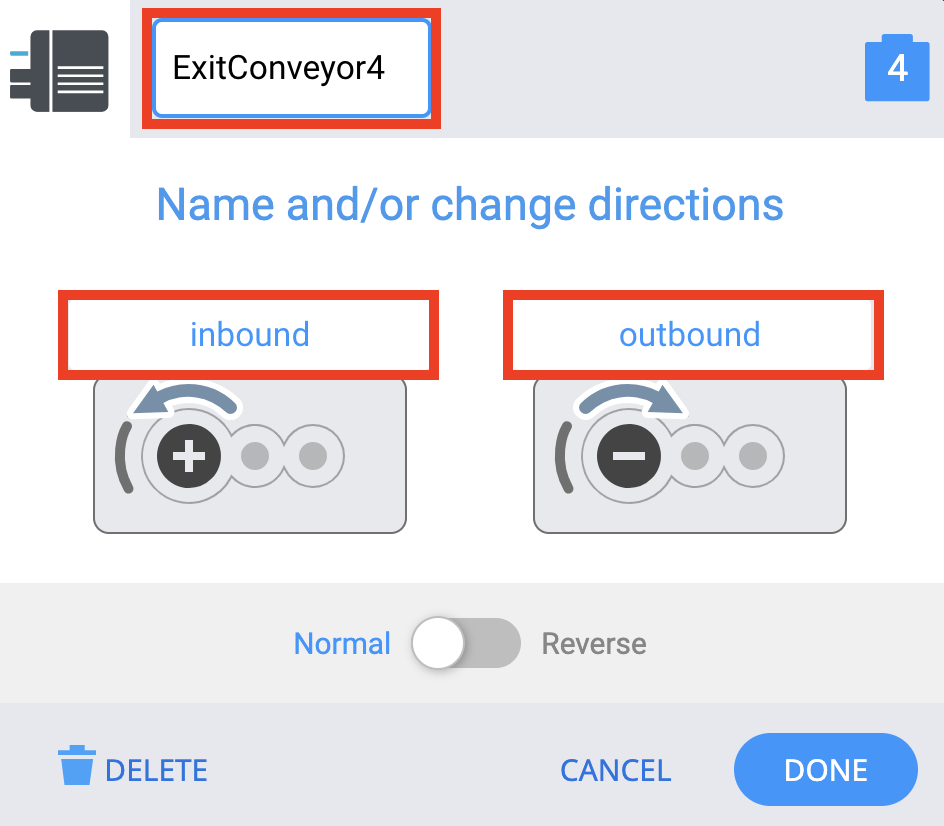
Edite os rótulos para corresponder aos da imagem.
- O motor deve ser renomeado para o identificar claramente como motor do transportador de saída. O número no nome faz referência à porta na qual está ligado.
- As direções do motor também devem ser renomeadas parade entradaede saída,como fez anteriormente para o transportador de entrada.
Entradasignifica que o Transportador de Saída está a rodaremao Transportador de Transporte. Saídasignifica que o Transportador de Saída está a rodarpara longe do Transportador de Transporte.
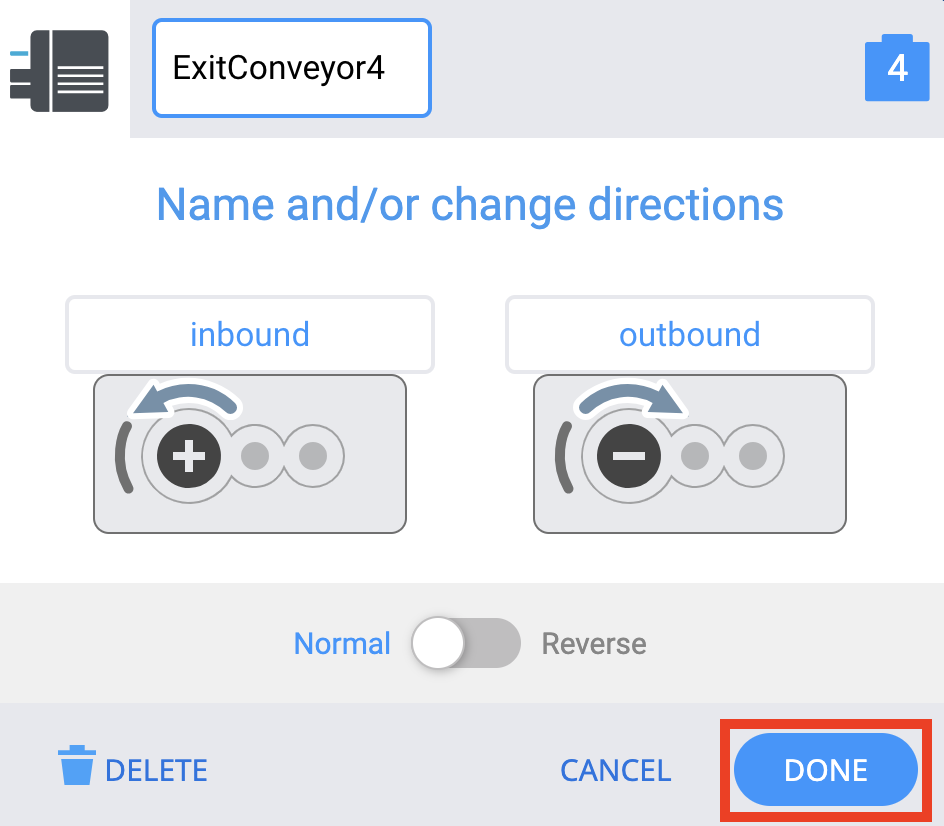
Selecione Concluído.
Configurar o motor do transportador
Por fim, terá de configurar o motor do Transport Conveyor. Além disso, terá de inverter a direção do motor para que o transportador se mova na direção necessária.
Na janela Dispositivos, seleccione Motor na lista de Dispositivos.
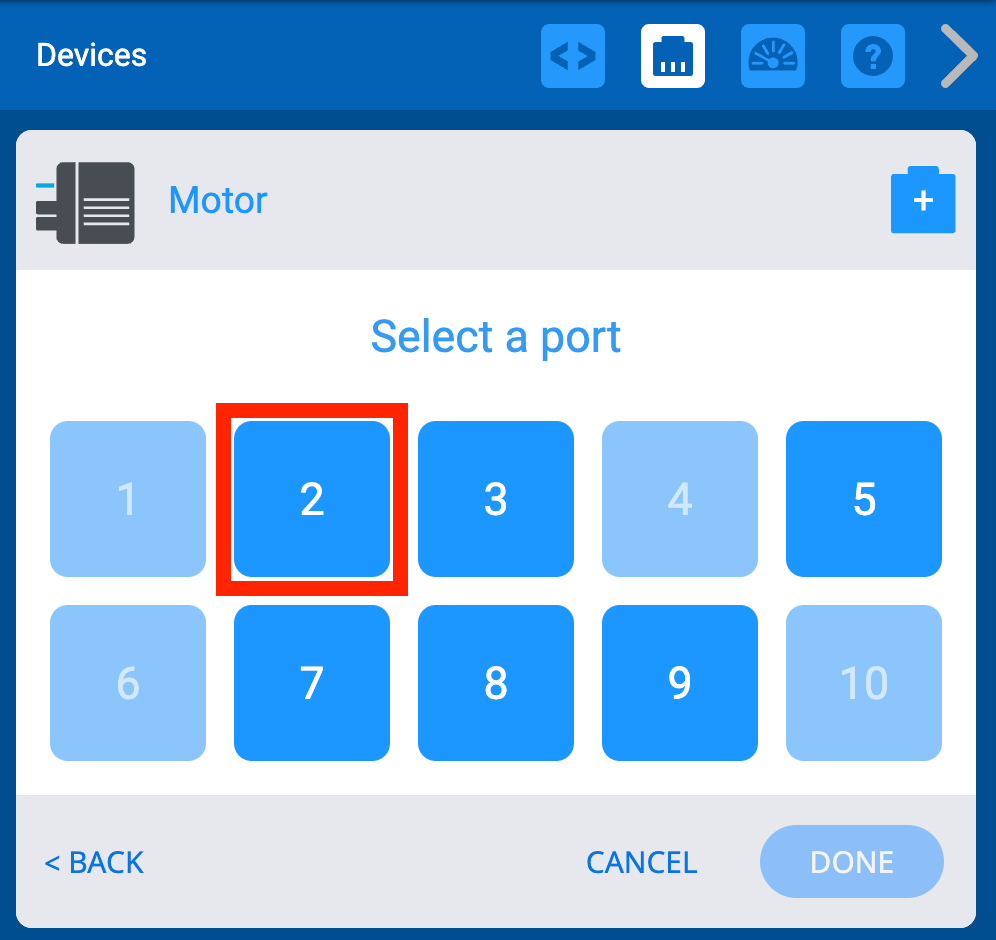
Selecione a porta 2 para corresponder à porta na qual o motor do transportador está ligado.
Nota:Certifique-se de que o motor do transportador está ligado à porta 2 do Brain.
Renomeie o motor para TransportConveyor2.
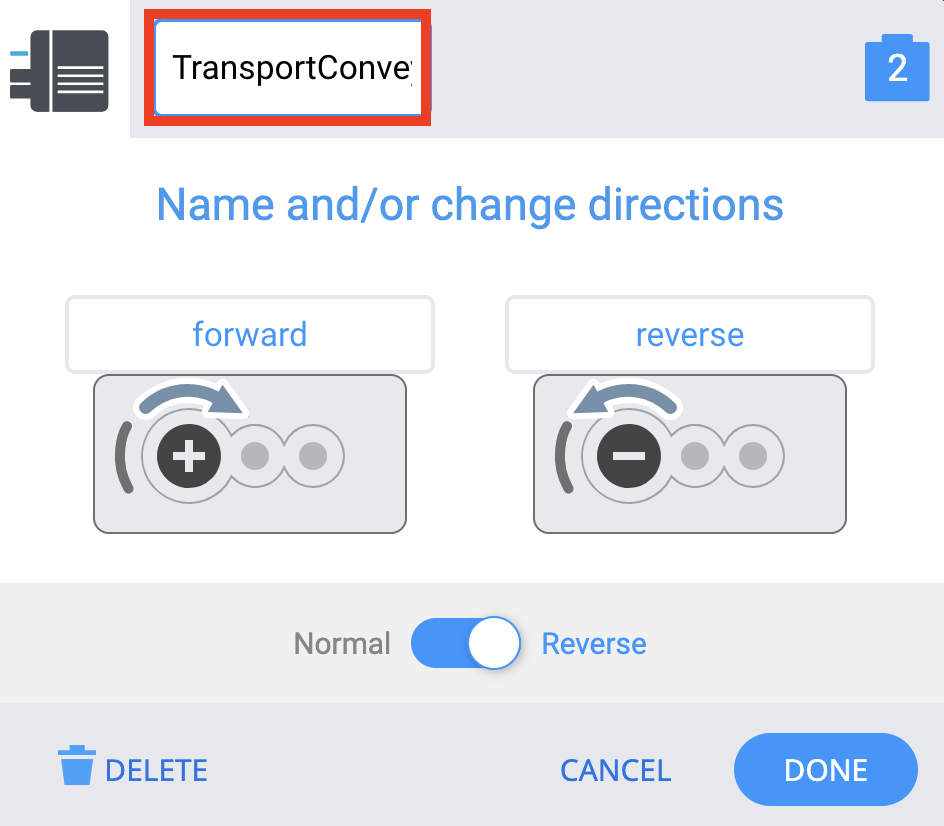
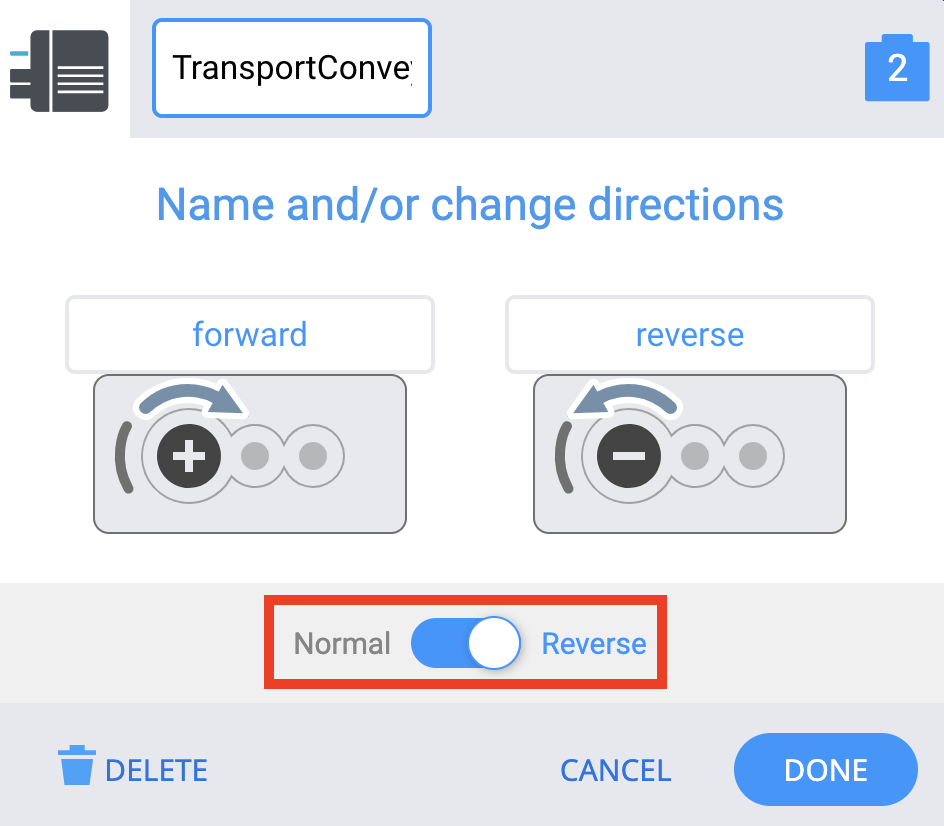
Para que o transportador mova os materiais nas direções corretas, terá de selecionar o botão de comutação para alterar a direção do motor de Normal para Reverso.
Direção do motor do transportador de transporte
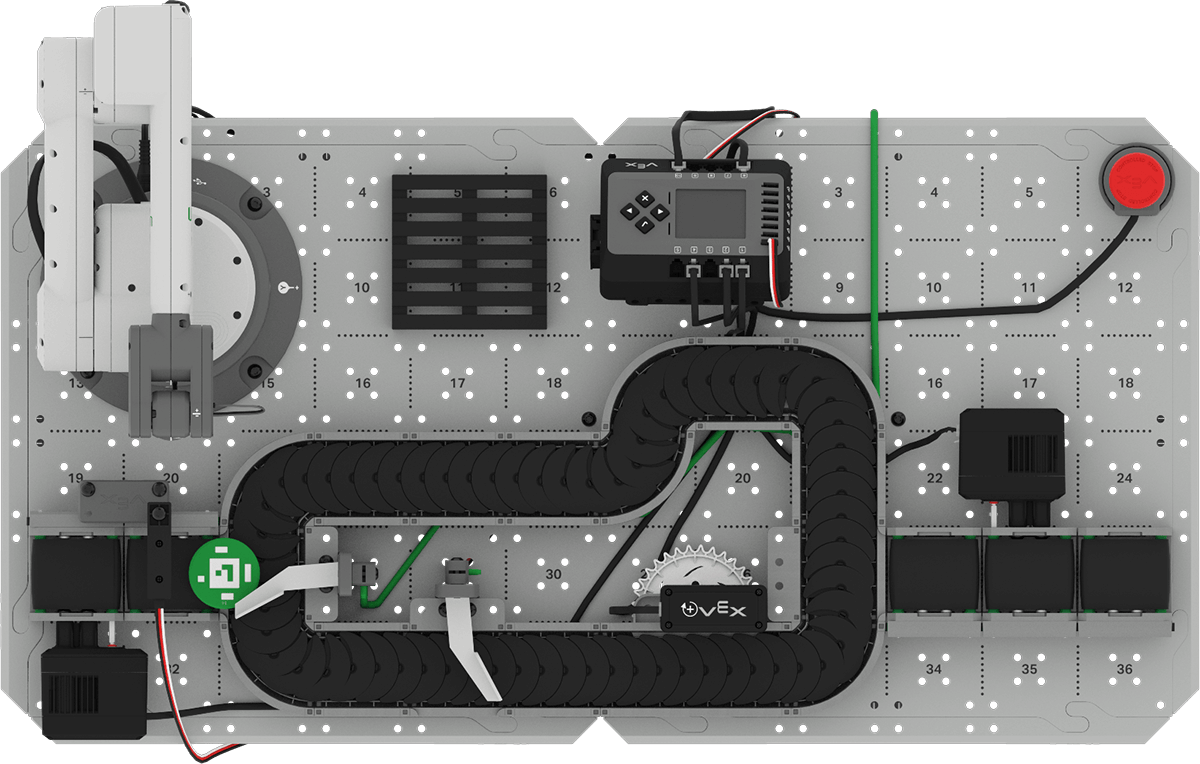
Ao configurar o motor do transportador, teve de inverter a sua direção. Isto ocorre porque o motor irá rodar o transportador no sentido horário por defeito. Pode determinar a direção de rotação padrão de um motor com base no rótulo do motor.
Na parte superior de cada motor, existe um ícone indicando qual a direção positiva. No caso do Transport Conveyor, a seta aponta no sentido dos ponteiros do relógio. Isto significa que, por defeito, qualquer disco colocado no Transport Conveyor giraria do Entry Conveyor para o primeiro desviador. Ao inverter o motor na configuração, garante que a direção para a frentecorresponde ao que é discutido como o caminho correto ao longo do transportador.
Modificando a paragem controlada
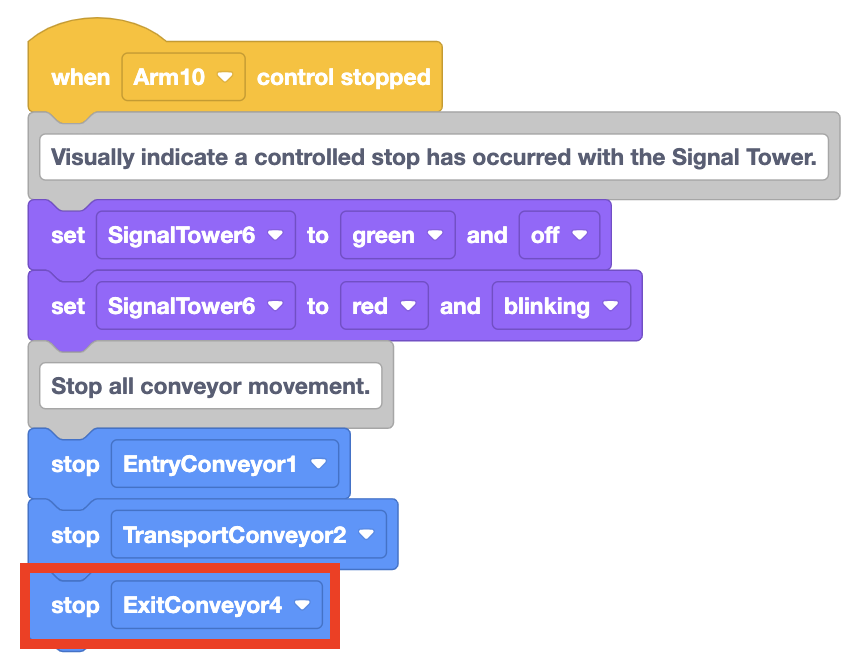
Agora que já configurou todos os motores do transportador, precisa de atualizar a paragem controlada. Quando uma paragem controlada é acionada, todos os motores devem parar de funcionar, para que tenha a certeza de que a Base de Célula de Trabalho CTE está segura para movimentação. Irá adicionar blocos ao blocoWhen controlled stoppara parar estes motores do transportador.
Crie um Comentário para descrever os comportamentos do transportador necessários durante uma paragem controlada.

Adicione o blocoComentário à pilha de blocos existente.
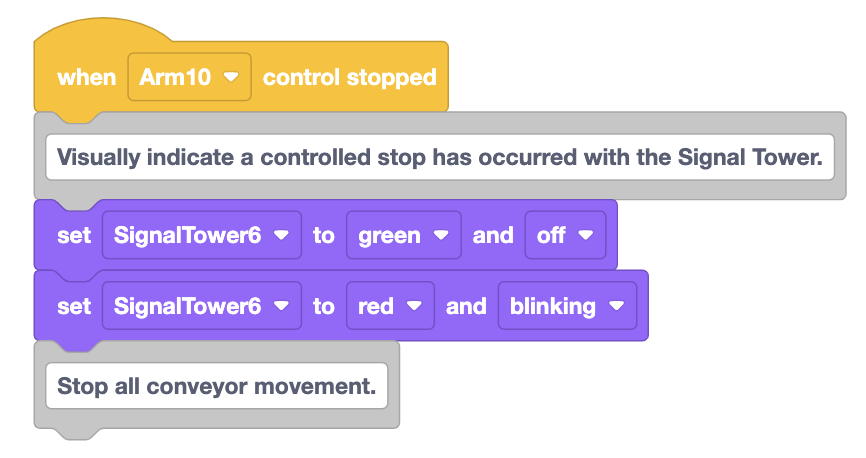
Arraste um bloco Stop motor para parar o Entry Conveyor e fixe-o à pilha de blocos.
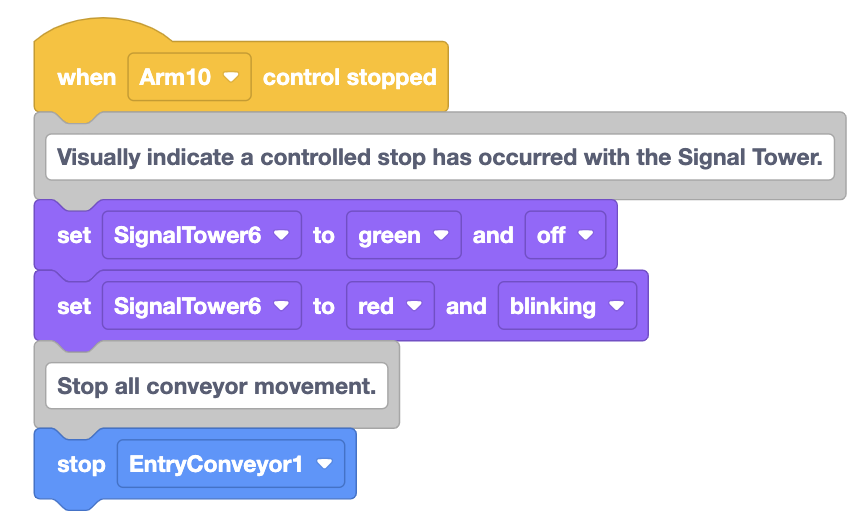
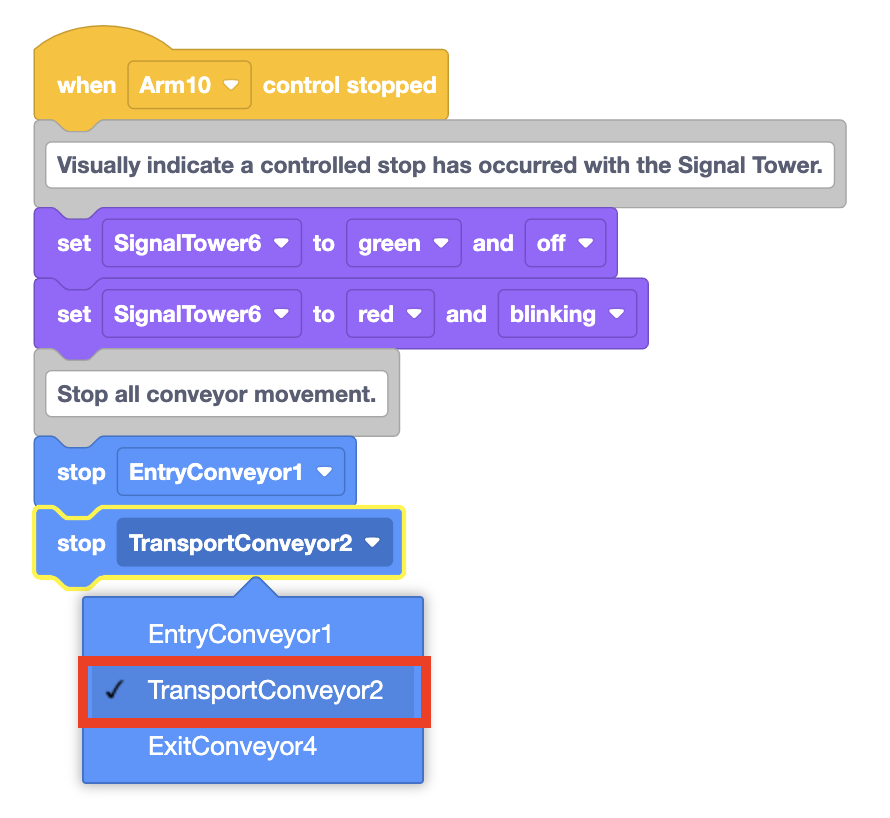
Arraste outro bloco Stop motor e fixe-o na parte inferior da pilha de blocos.
Selecione a seta para abrir o menu suspenso e selecione 'TransportConveyor2' para definir o parâmetro para parar o Transport Conveyor numa paragem controlada.
Adicione um terceiro bloco Stop motor à pilha. Altere o parâmetro para 'ExitConveyor4'.
Criação de um Projeto para Transportar um Disco Utilizando os Conveyors
Agora que já configurou os seus motores de rastos e modificou a paragem controlada, pode começar a construir um projeto para transportar um Disco utilizando os rastos. Começará a construir um projeto para o Disco viajar do Transportador de Entrada, ao longo do Transportador de Transporte até ao Transportador de Saída. Para tal, o movimento do Disco ao longo dos transportadores deve ser cuidadosamente coordenado. Uma forma de conseguir esta coordenação é criar um projeto utilizando movimentos baseados no tempo, como mostra o vídeo abaixo.
Movimentos baseados no tempo
Ao utilizar uma combinação de blocos Wait, Spine Stop motor , pode criar um projeto em que cada transportador inicia e pára no momento certo para transferir um disco de um transportador para o outro. Esta forma de codificar os transportadores é chamada de utilização de movimentos baseados no tempo.
Construindo o Projeto
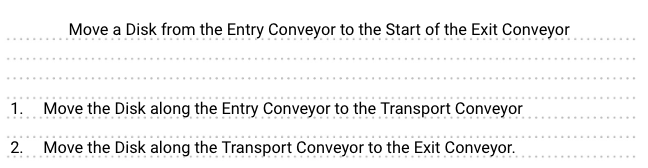
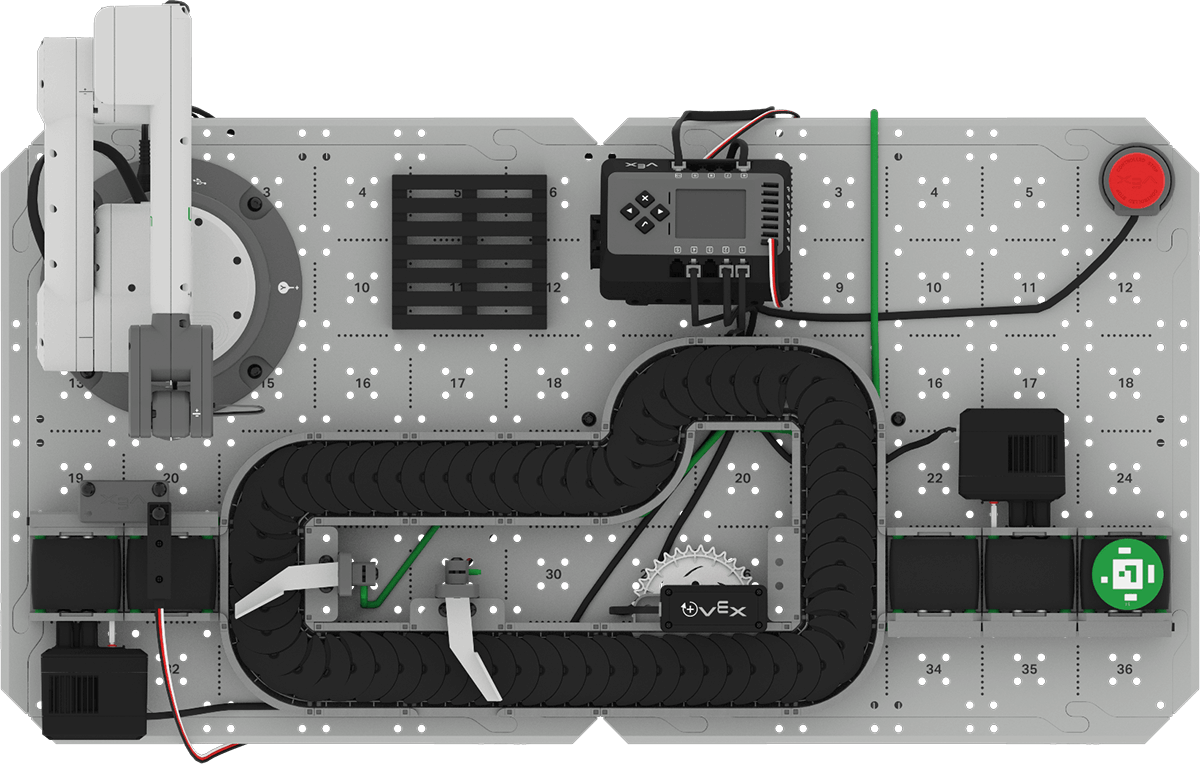
Registe as etapas de planeamento necessárias para mover o disco, como as que são mostradas na imagem aqui, no seu caderno de engenharia.
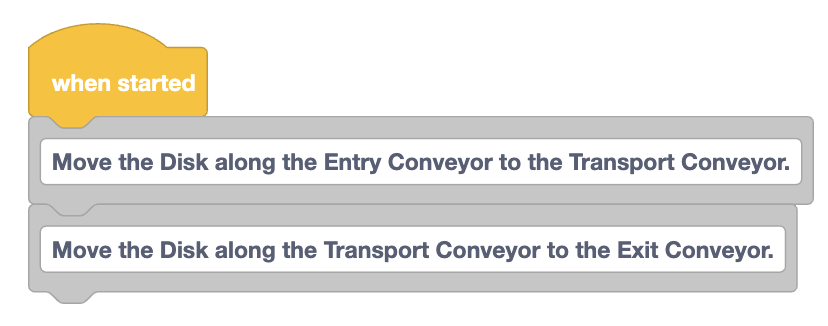
Crie blocos Comentário para cada etapa do seu plano e anexe-os ao bloco Quando começou .
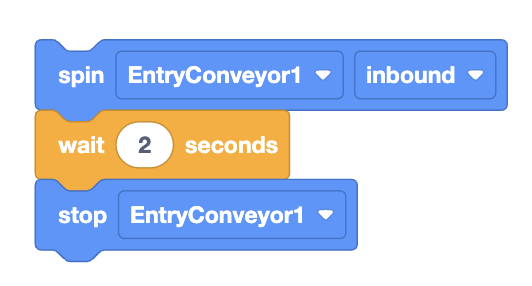
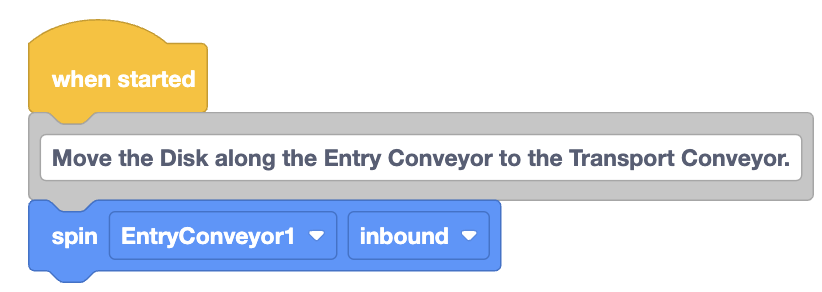
Fixe um bloco Spinabaixo dos primeiros Comentário.
O disco está a iniciar no transportador de entrada e na direção do transportador de transporte, pelo que os parâmetros podem permanecer definidos como 'EntryConveyor1' e 'inbound'.
O blocoSpinirá rodar o motor para sempre até que lhe seja pedido para o parar.
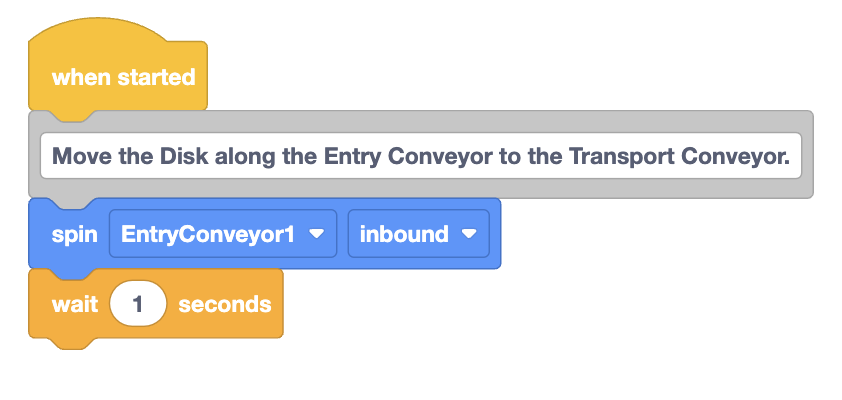
Em seguida, anexe um bloco Wait.
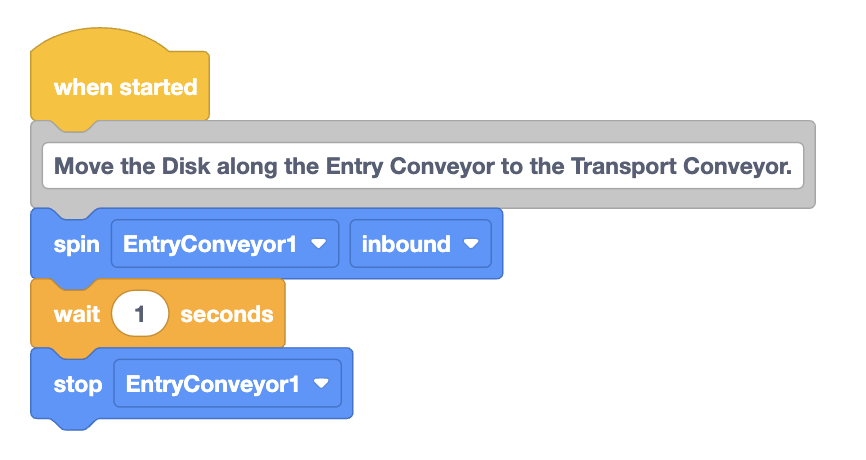
Fixe um bloco de motor Stopna parte inferior da pilha de blocos. Certifique-se de que o parâmetro está definido como 'EntryConveyor1'.
Faça uma previsão sobre o que pensa que vai acontecer quando o projeto for executado. Registe isso no seu caderno de engenharia.
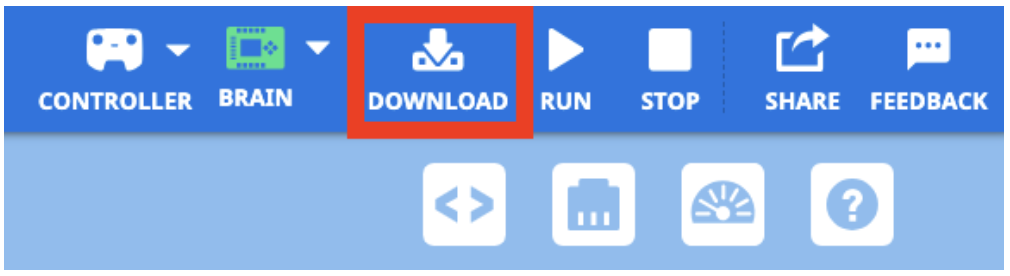
Certifique-se de que o Brain está ligado ao VEXcode e descarregue o projeto para o Brain.
Certifique-se de que um Disco verde está colocado no início do Transportador de Entrada, como aqui se mostra. Prima o botão Check no Brain para executar o projeto e testá-lo.
Observe o comportamento do transportador. Transporta o Disco até ao final do Transportador de Entrada? Porquê ou por que não?
Quando a passadeira parar de se mover, prima o botão X no Cérebro para parar o projeto. Registe as suas observações no seu caderno de engenharia.

Cronometrando o transportador
Ao executar o seu projeto, provavelmente reparou que o Entry Conveyor não moveu o Disco até ao Transport Conveyor. Isto ocorre porque o parâmetro no bloco Wait está definido para apenas 1 segundo. É necessário mais tempo para que o transportador de entrada gire antes de o bloco Stop motorser executado.
Ao criar e testar um projeto utilizando movimentos baseados no tempo, pode ser necessário ajustar o parâmetro no bloco Wait mais do que uma vez para obter o tempo correto.
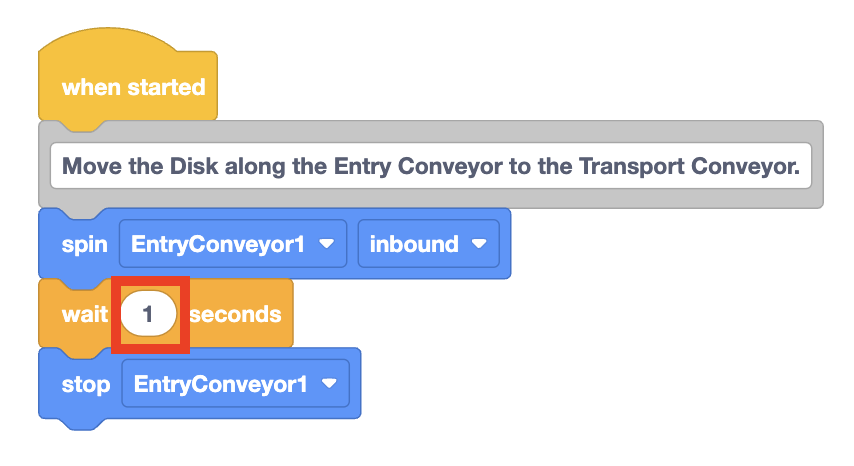
Ajuste o parâmetro no bloco Aguarde para 7 segundos, descarregue e execute novamente o projeto para testar.
O Transportador de Entrada transportou o Disco até ao fim, onde poderia ser recolhido pelo Transportador? Caso contrário, ajuste novamente o parâmetro até que tal aconteça.
Nota:O número de segundos necessários no parâmetro pode variar. Utilize números que funcionem de forma fiável para a sua Base de Células de Trabalho CTE.
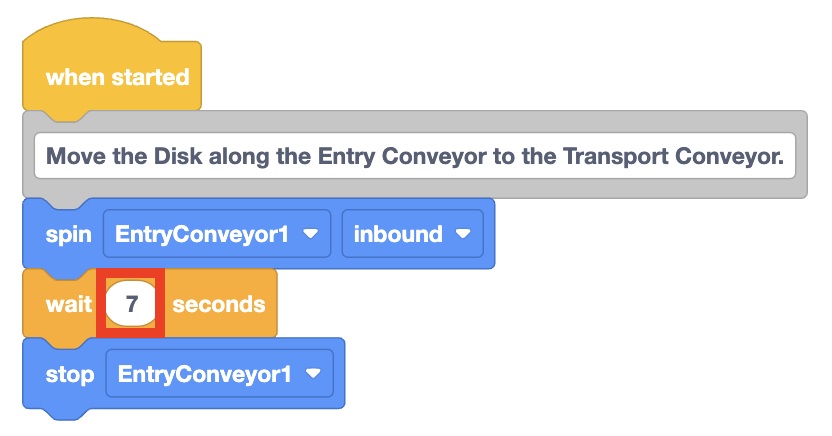
Adicione os blocos necessários para mover o Disco ao longo do Transport Conveyor.
Note que estes são os mesmos blocos utilizados para o Entry Conveyor, apenas com os parâmetros definidos como ‘TransportConveyor2’ e ‘forward’.
Descarregue o projeto para o Brain e execute-o para testar. O disco percorre todo o comprimento do transportador, parando no desviador? Caso contrário, ajuste o parâmetro do bloco Aguardeaté que tal aconteça.
Para sua informação
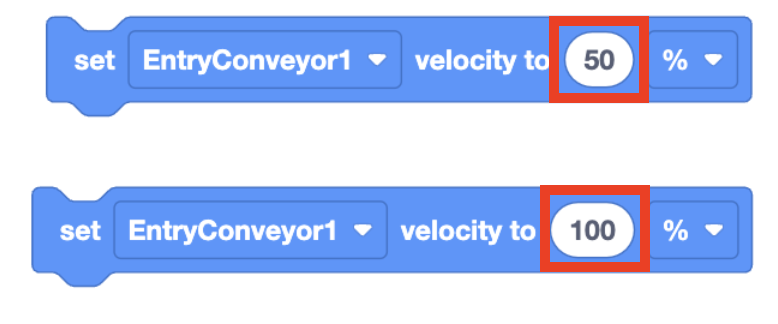
A velocidade a que os objetos viajam ao longo de um transportador pode ser modificada utilizando o bloco Definir velocidade do motor . O parâmetro no bloco pode ser alterado para fazer com que o transportador gire mais rápido ou mais lentamente. A velocidade padrão do transportador é de 50% e a velocidade máxima é de 100%.
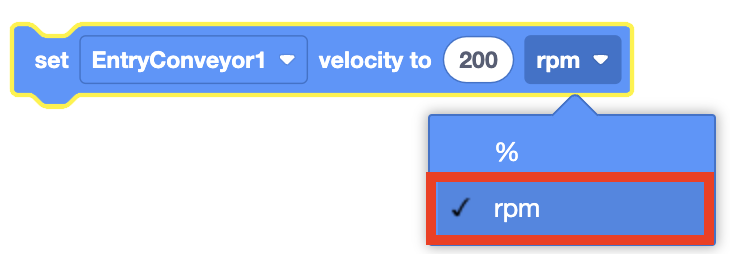
O parâmetro do bloco Set motor velocity também pode ser definido utilizando rpm's ou rotações por minuto.
Atividade
Agora que já utilizou movimentos baseados no tempo para codificar os transportadores para mover um Disco do Transportador de Entrada e ao longo do Transportador de Transporte até ao Transportador de Saída, irá desenvolver o seu projeto para mover o Disco até ao fim do Transportador de Saída sem cair do fim do transportador.
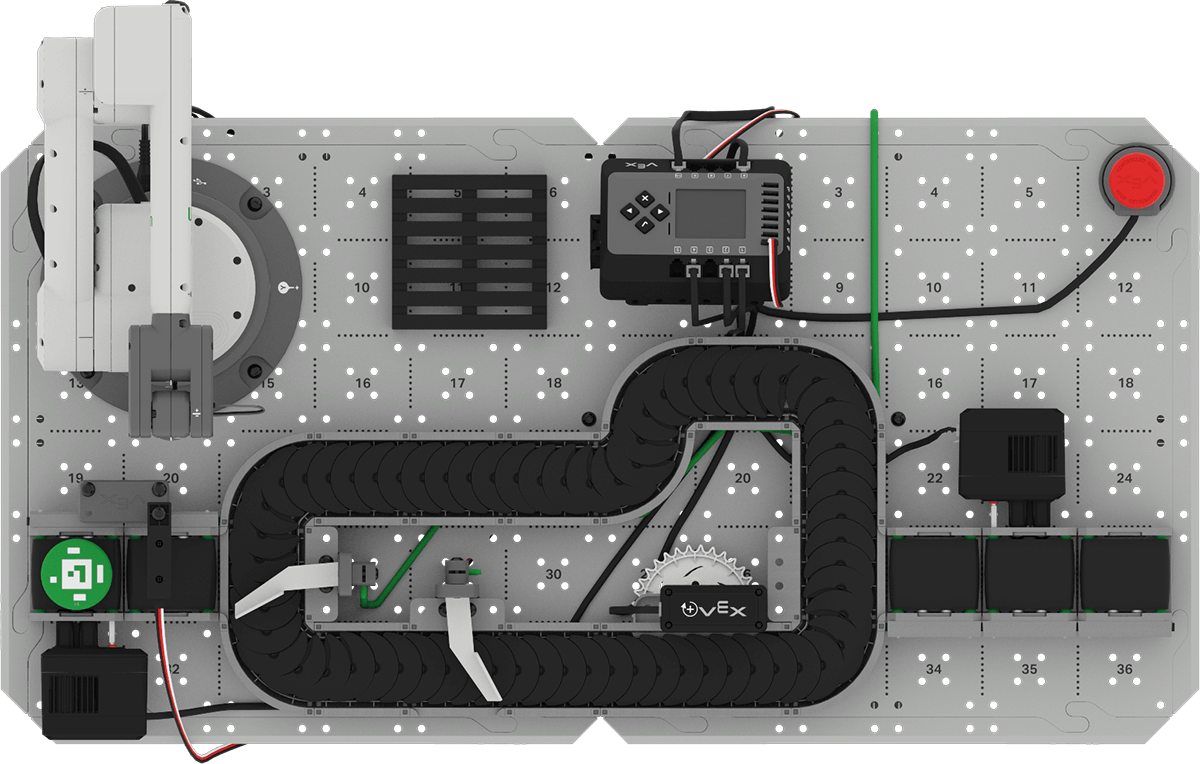
Configuração:Coloque um disco no início do transportador de entrada, como se mostra abaixo.
Atividade: Crie um projeto VEXcode que transportará um disco desde o transportador de entrada, ao longo do transportador de transporte, até ao final do transportador de saída.
- Planeie como irá desenvolver o seu projeto para mover o Disco até ao final do Transportador de Saída.
- Documente o seu plano no seu caderno de engenharia.
- Renomeie o seu projeto Unidade 4 Lição 2 Atividade e guarde-o no seu dispositivo antes de começar a editar o projeto.
- Edite o projeto no VEXcode para corresponder ao plano acordado pelo seu grupo.
- Coloque um disco no ponto inicial do Entry Conveyor e execute o projeto. Os transportadores movem o disco até ao fim do transportador de saída sem cair? Pare o projeto quando os transportadores terminarem de se deslocar e registe as suas observações no seu caderno de engenharia.
- Se o disco cair do final do transportador de saída, edite o seu projeto até que um disco viaje até ao final do transportador sem cair. Documente quaisquer alterações no seu caderno de engenharia.
Verifique a sua compreensão
Antes de passar para a lição seguinte, certifique-se de que compreende os conceitos desta lição respondendo às seguintes questões no seu caderno de engenharia.
Verifique suas perguntas de compreensão > ( Google Doc / .docx / .pdf )
Selecione Seguinte > para avançar para a Reflexão da Unidade Média.