
Lección 2: Codificación de transportadores
Anteriormente, aprendió sobre transportadores y desviadores, y cómo permiten el transporte eficiente de materiales en entornos industriales. También aprendió cómo funcionan los transportadores en la celda de trabajo CTE. Ahora está listo para comenzar a codificar los transportadores para transportar discos. En esta lección aprenderás:
- Cómo configurar motores transportadores individuales en VEXcode.
- Cómo crear un proyecto VEXcode para mover discos de un transportador a otro utilizando movimientos basados en el tiempo.
Al finalizar esta lección, creará un proyecto para transportar un disco desde el transportador de entrada, a través del transportador de transporte y hasta el transportador de salida.
Preparándose para codificar los transportadores
Antes de poder codificar los transportadores en la celda de trabajo CTE, hay algunas tareas importantes que debe completar para prepararse. Necesitará configurar cada motor transportador individual en VEXcode. También necesitará modificar la pila de bloques que inician una parada controlada, para asegurarse de que todos los motores del transportador estén incluidos.
Configuración de motores individuales en VEXcode
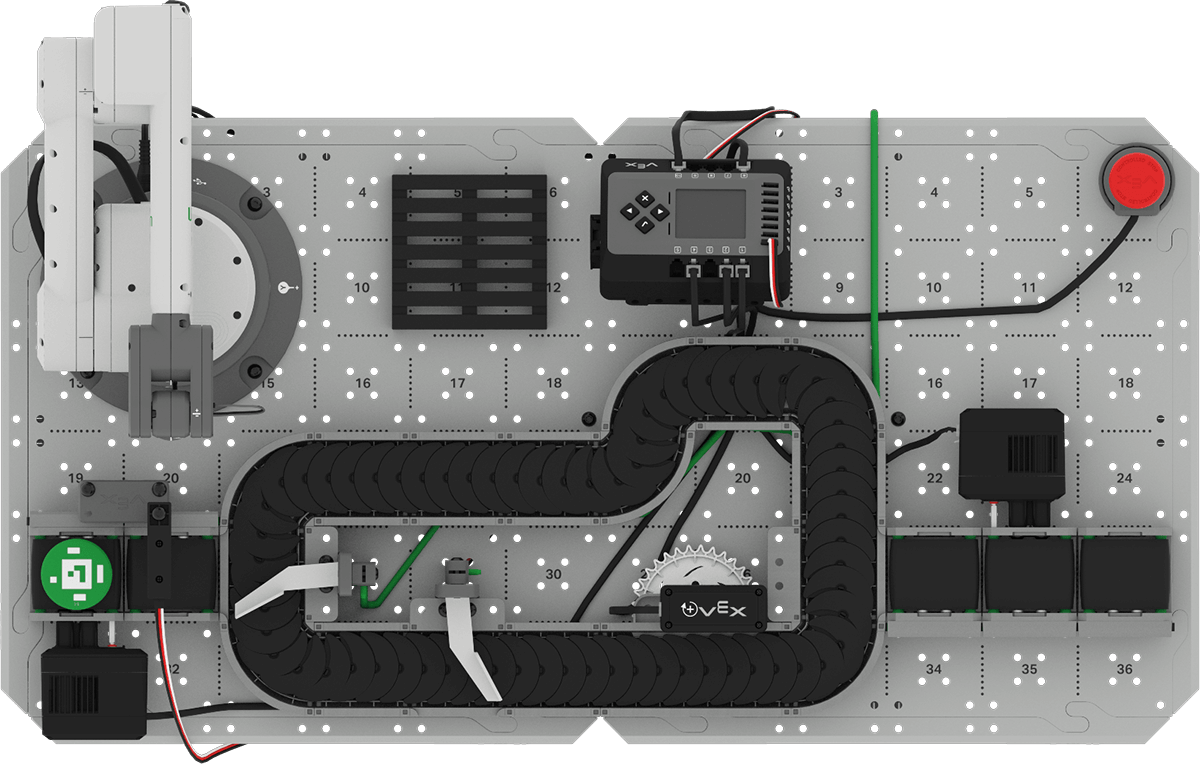
Cada transportador de la celda de trabajo CTE está controlado por un motor independiente. Debido a esto, necesitará agregar cada motor a la configuración en VEXcode antes de poder comenzar su proyecto. Además, deberá asegurarse de que cada motor tenga el nombre correcto y que esté configurado para girar en la dirección necesaria para transportar correctamente los materiales.
Configuración del motor del transportador de entrada
Abra el proyecto Plantilla base del brazo de 6 ejes Brain CTE.
Nota:Para recordar cómo abrir ejemplos en VEXcode EXP, consulte la Unidad anterior.

Cambie el nombre del proyecto a Unidad 4 Lección 2y guárdelo en su dispositivo.

Abra la ventana Dispositivos.

Seleccionar Agregar un dispositivo.

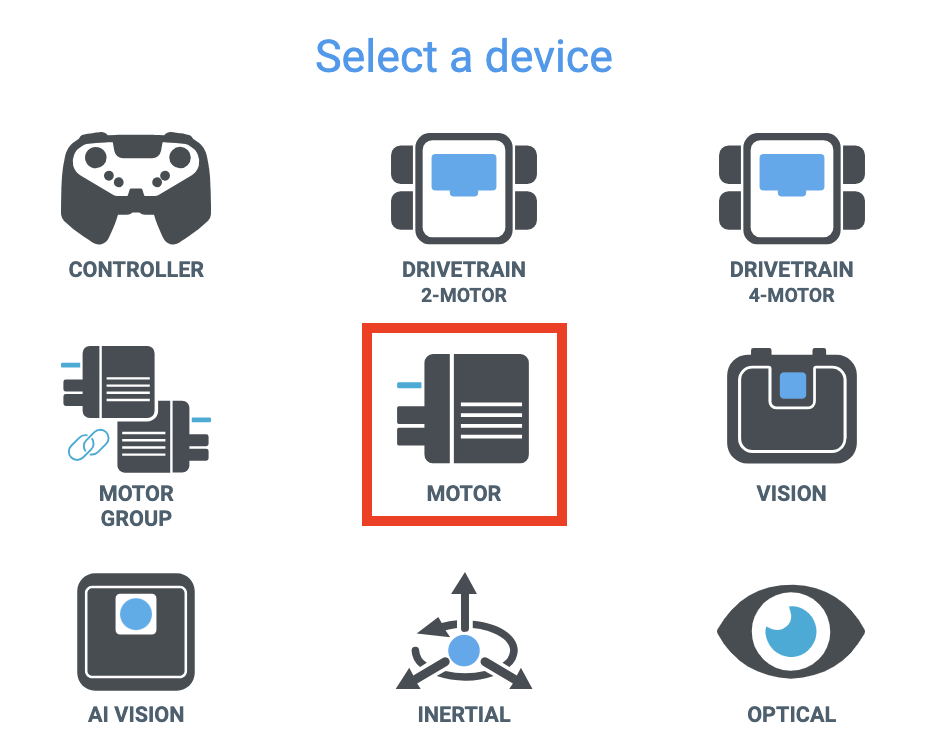
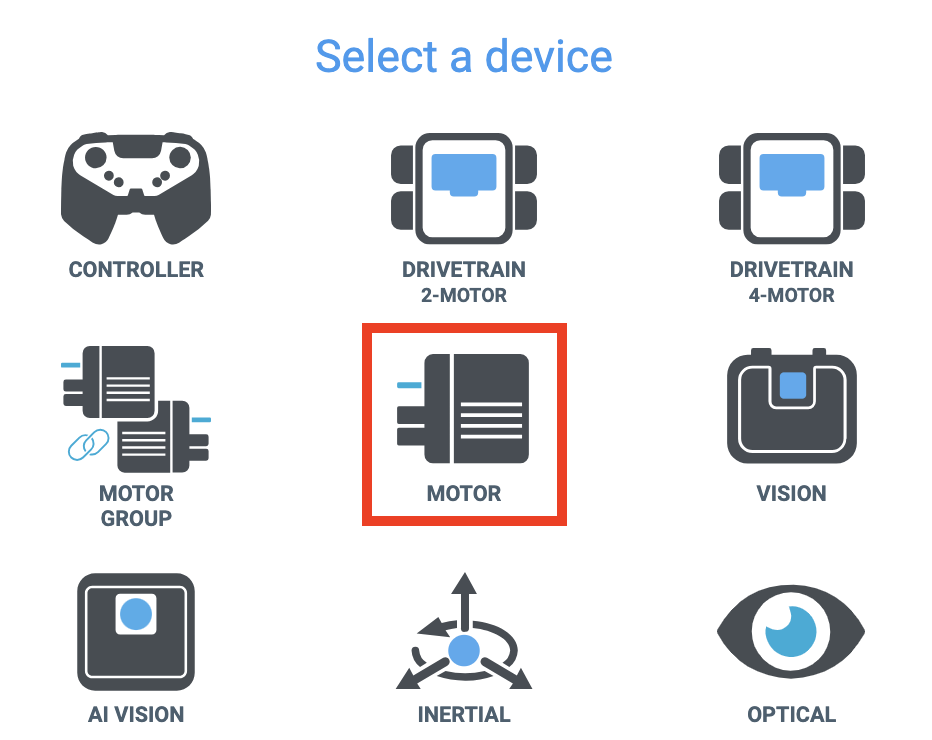
Seleccione Motor de la lista de Dispositivos.
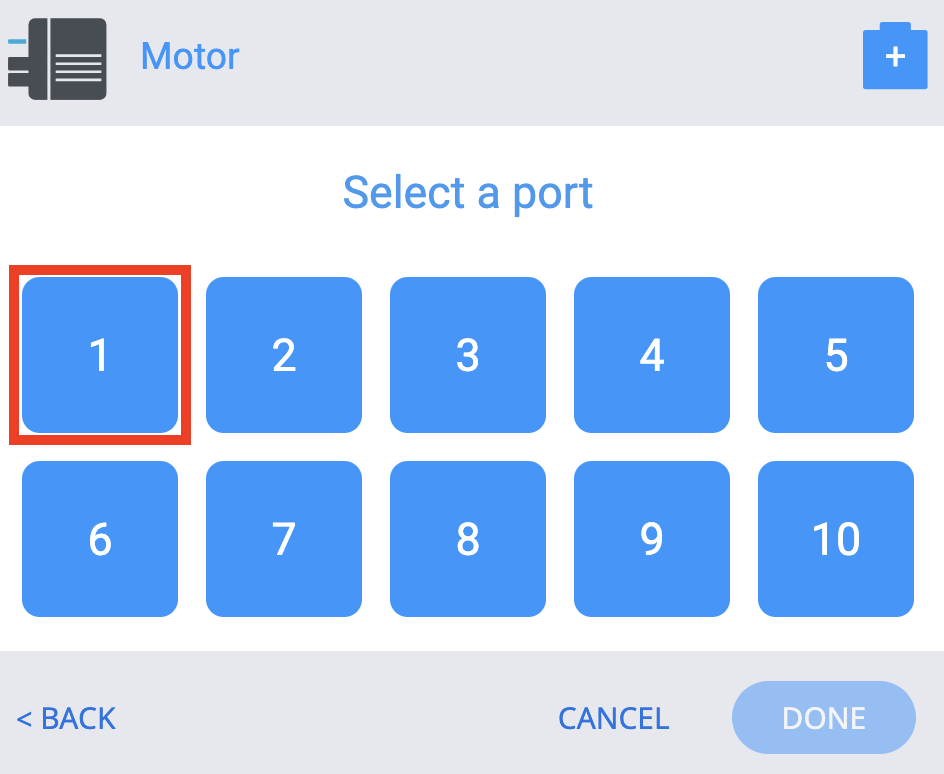
Seleccione el puerto 1 en el cerebro para que coincida con el puerto en el que está conectado el motor del transportador de entrada.
Nota:Asegúrese de que el motor del transportador de entrada esté conectado al puerto 1 del cerebro.
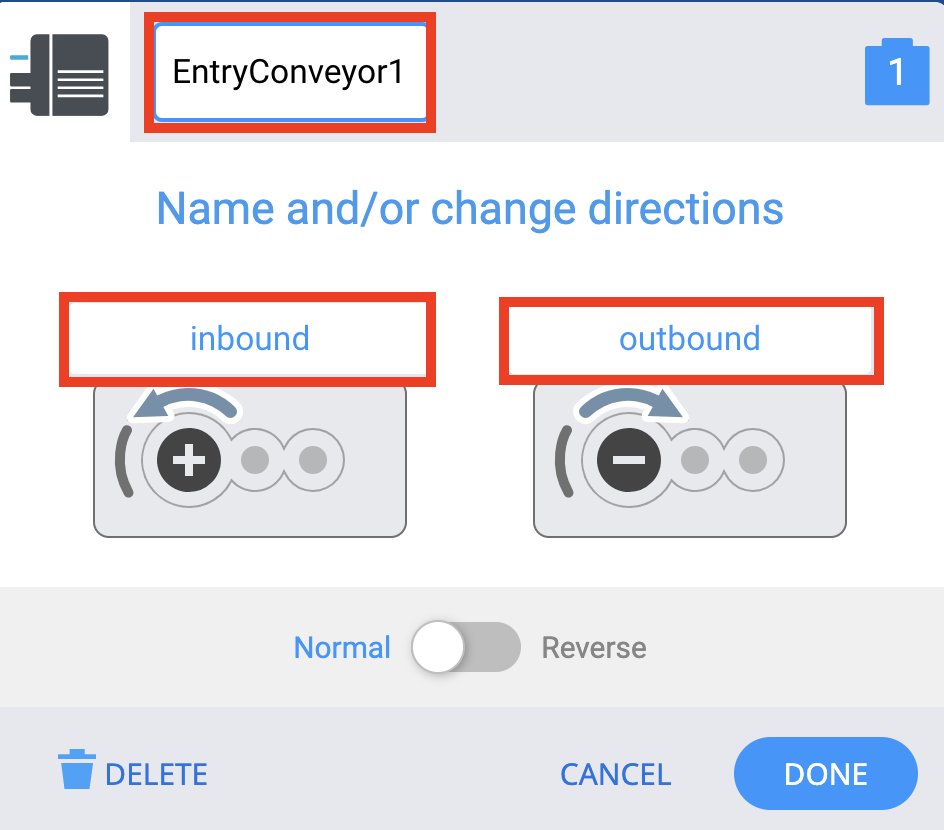
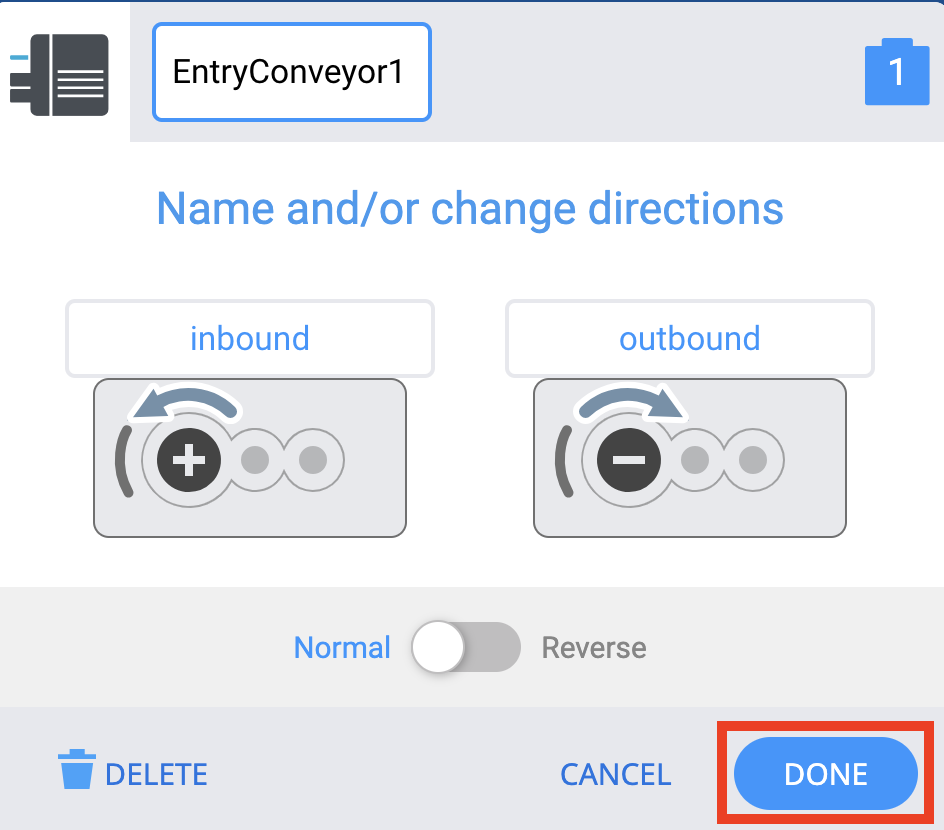
Edite las etiquetas para que coincidan con esta imagen.
- Se debe cambiar el nombre del motor para identificarlo claramente como el motor del transportador de entrada. El número en el nombre hace referencia al puerto al que está conectado.
- Las direcciones del motor también deberían cambiar de nombre a entrada y salida, ya que las etiquetas predeterminadas avance y retrocesono describen adecuadamente el movimiento de los transportadores.
Entrante significa que el transportador de entrada está girando hacia el transportador de transporte. Salientesignifica que el transportador de entrada está girando alejándose del transportador de transporte.
Seleccionar Hecho.
Configuración del motor del transportador de salida
El motor del transportador de salida se puede configurar de la misma manera que el motor del transportador de entrada.
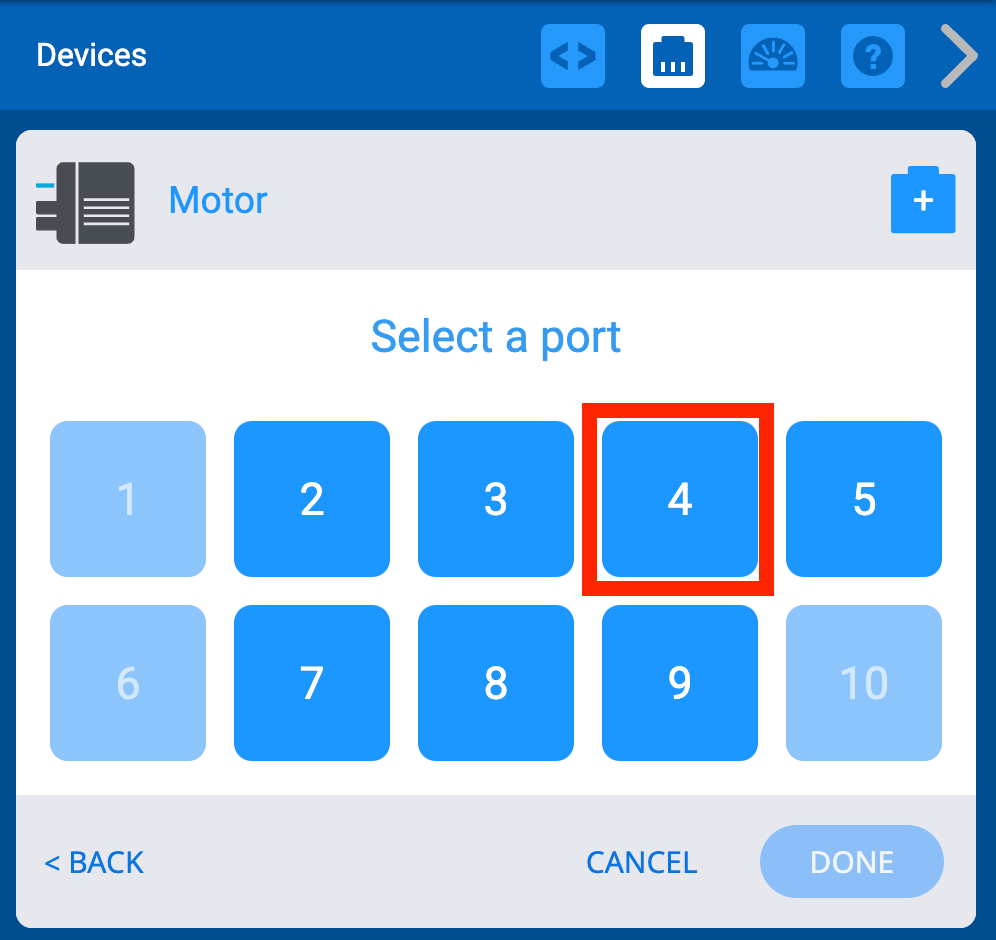
En la ventana Dispositivos, seleccione Motor de la lista de dispositivos.

Seleccione el puerto 4 para que coincida con el puerto al que está conectado el motor del transportador de salida.
Nota:Asegúrese de que el motor del transportador de salida esté conectado al puerto 4 del cerebro.
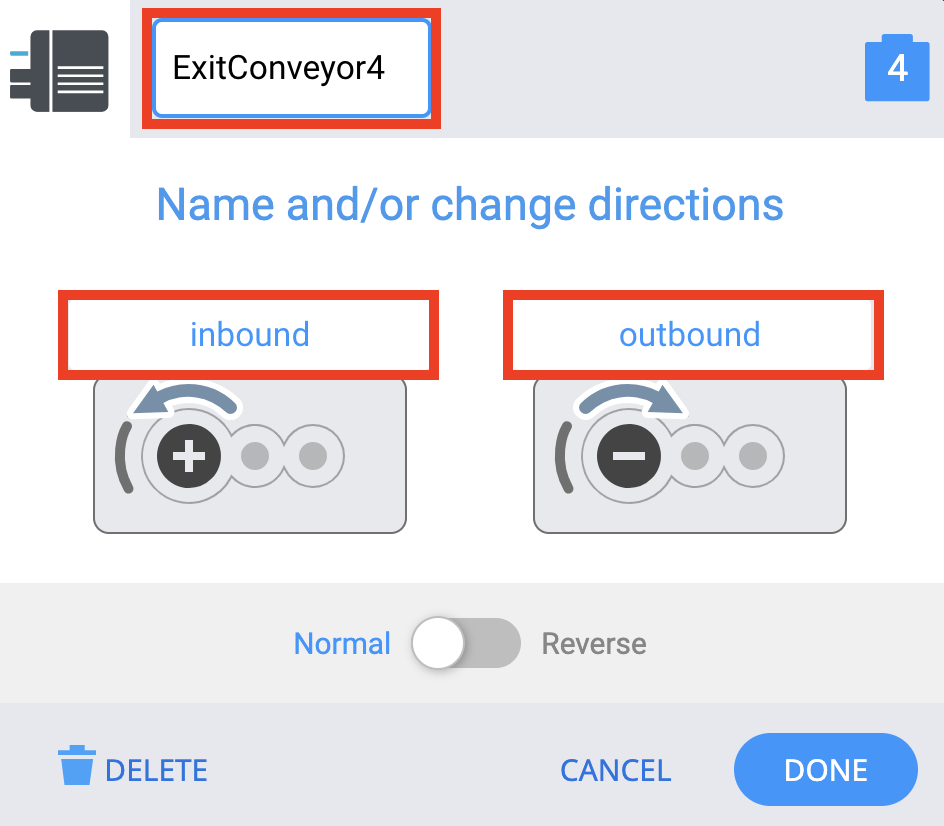
Edite las etiquetas para que coincidan con las de la imagen.
- Se debe cambiar el nombre del motor para identificarlo claramente como el motor del transportador de salida. El número en el nombre hace referencia al puerto al que está conectado.
- Las direcciones del motor también deben cambiar de nombre ade entrada,yde salida,como lo hizo anteriormente para el transportador de entrada.
Entrantesignifica que el transportador de salida está girandohaciael transportador de transporte. Salientesignifica que el transportador de salida está girandoalejándose del transportador de transporte.
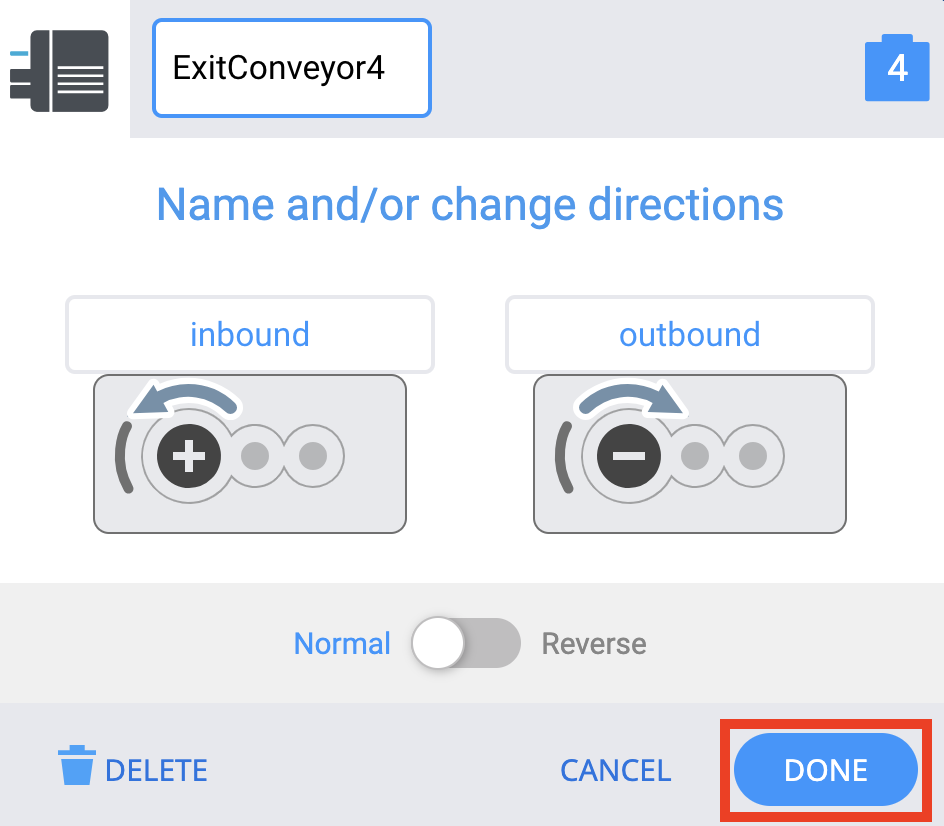
Seleccionar Listo.
Configuración del motor del transportador
Por último, deberás configurar el motor del transportador. Además, necesitarás invertir la dirección del motor para que el transportador se mueva en la dirección necesaria.
En la ventana Dispositivos, seleccione Motor de la lista de Dispositivos.
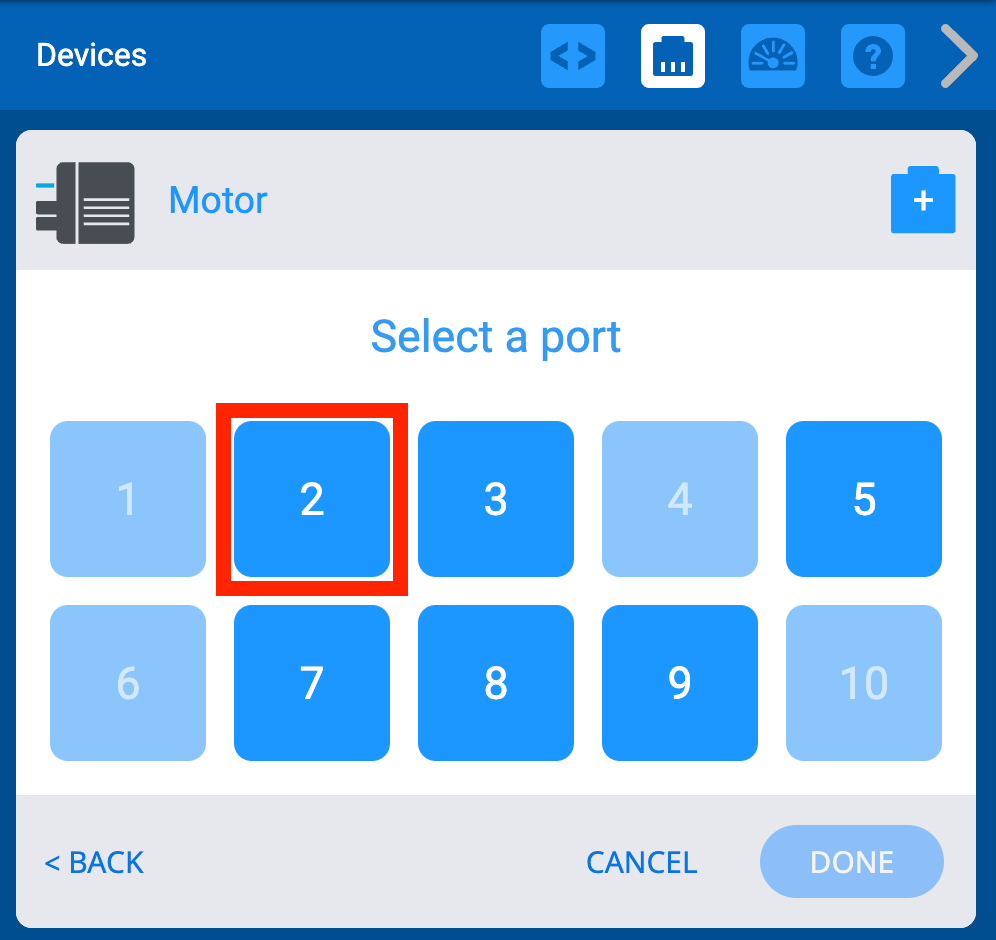
Seleccione el puerto 2 para que coincida con el puerto al que está conectado el motor del transportador.
Nota:Asegúrese de que el motor del transportador esté enchufado al puerto 2 del cerebro.
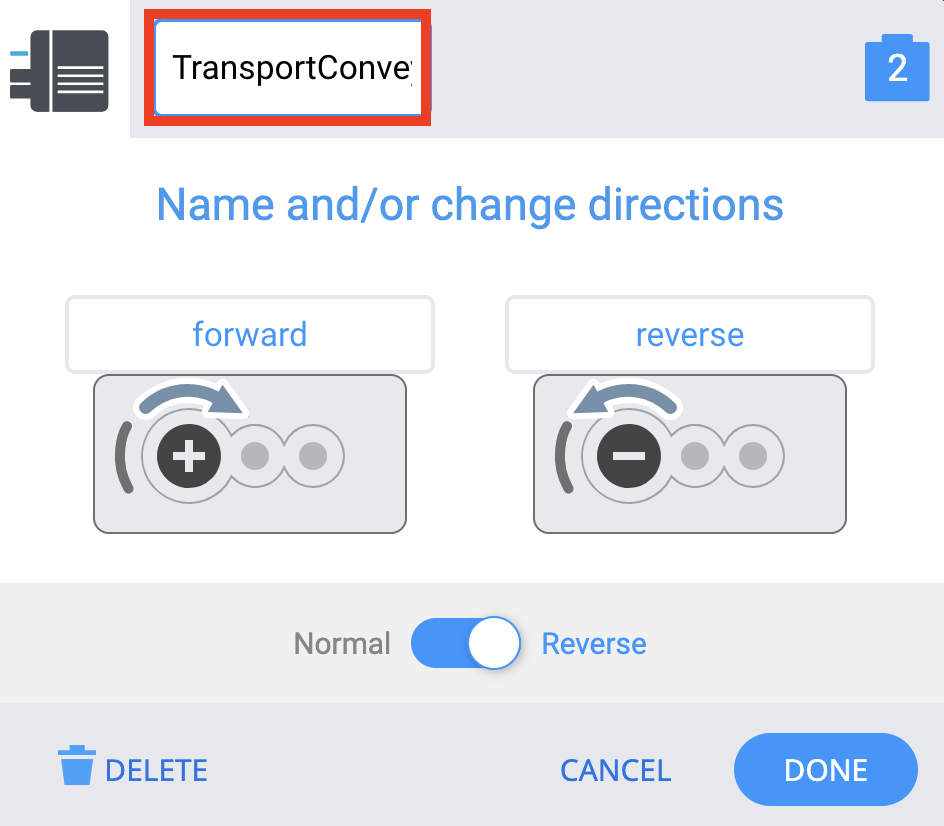
Rename the motor to TransportConveyor2.
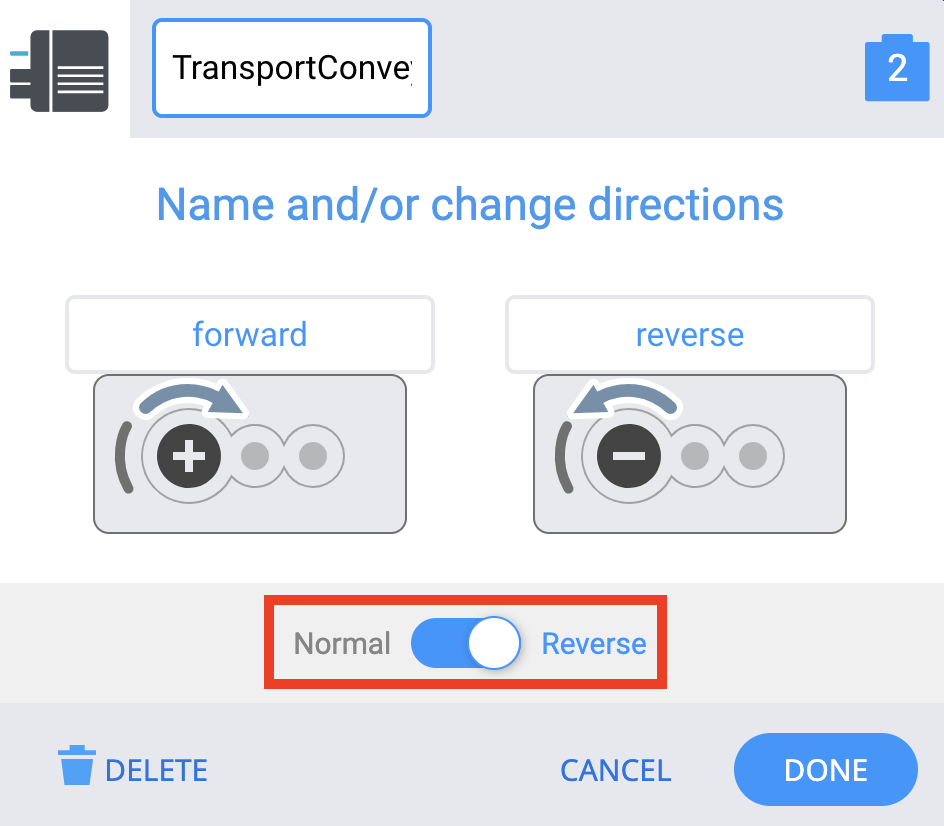
Para que la cinta transportadora mueva materiales en las direcciones correctas, deberá seleccionar el botón de alternancia para cambiar la dirección del motor de Normal a Inversa.
Dirección del motor del transportador de transporte
Al configurar el motor del transportador, hubo que invertir su dirección. Esto se debe a que el motor girará la cinta transportadora en el sentido de las agujas del reloj de manera predeterminada. Puede determinar la dirección de giro predeterminada de un motor según la etiqueta del motor.
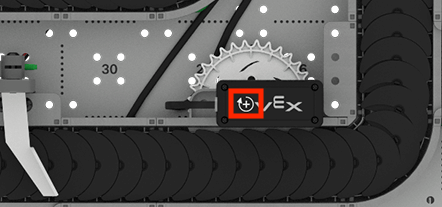
En la parte superior de cada motor, hay un ícono que indica qué dirección es positiva. En el caso de la cinta transportadora, la flecha apunta en el sentido de las agujas del reloj. Esto significa que, de forma predeterminada, cualquier disco colocado en el transportador de transporte girará desde el transportador de entrada hasta el primer desviador. Al invertir el motor en la configuración, se garantiza que la dirección hacia adelantecoincida con lo que se analiza como la ruta correcta a lo largo del transportador.
Modificación de la parada controlada
Ahora que ha configurado todos los motores del transportador, debe actualizar la parada controlada. Cuando se activa una parada controlada, todos los motores deben dejar de funcionar, para que pueda estar seguro de que la base de la celda de trabajo CTE es segura para moverla. Vas a agregar bloques alcuando se controla la paradapara detener estos motores del transportador.
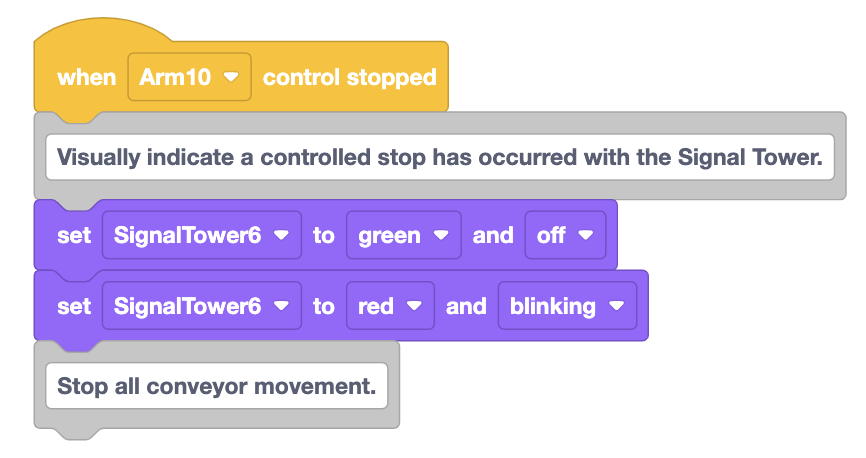
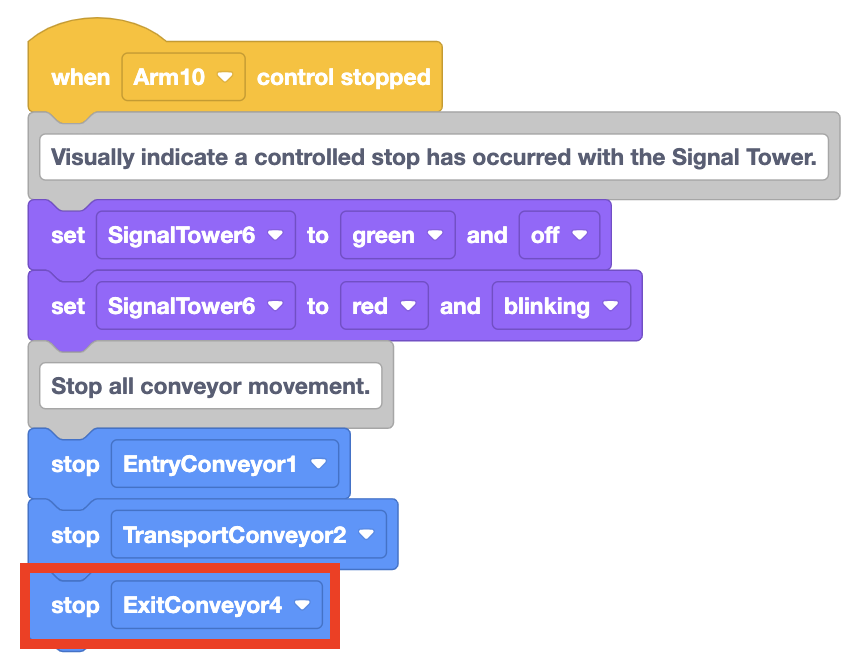
Cree un comentario para describir los comportamientos del transportador necesarios durante una parada controlada.

Añade el bloqueComentario a la pila de bloques existente.
Arrastre un bloque de motor de parada para detener el transportador de entrada y conéctelo a la pila de bloques.
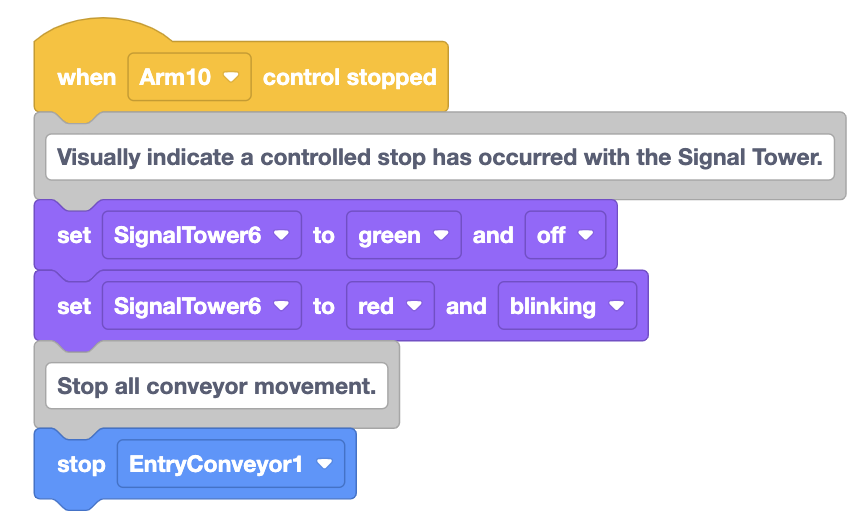
Arrastre otro bloque Stop motor y fíjelo a la parte inferior de la pila de bloques.
Seleccione la flecha para abrir el menú desplegable y seleccione 'TransportConveyor2' para configurar el parámetro para detener el transportador en una parada controlada.
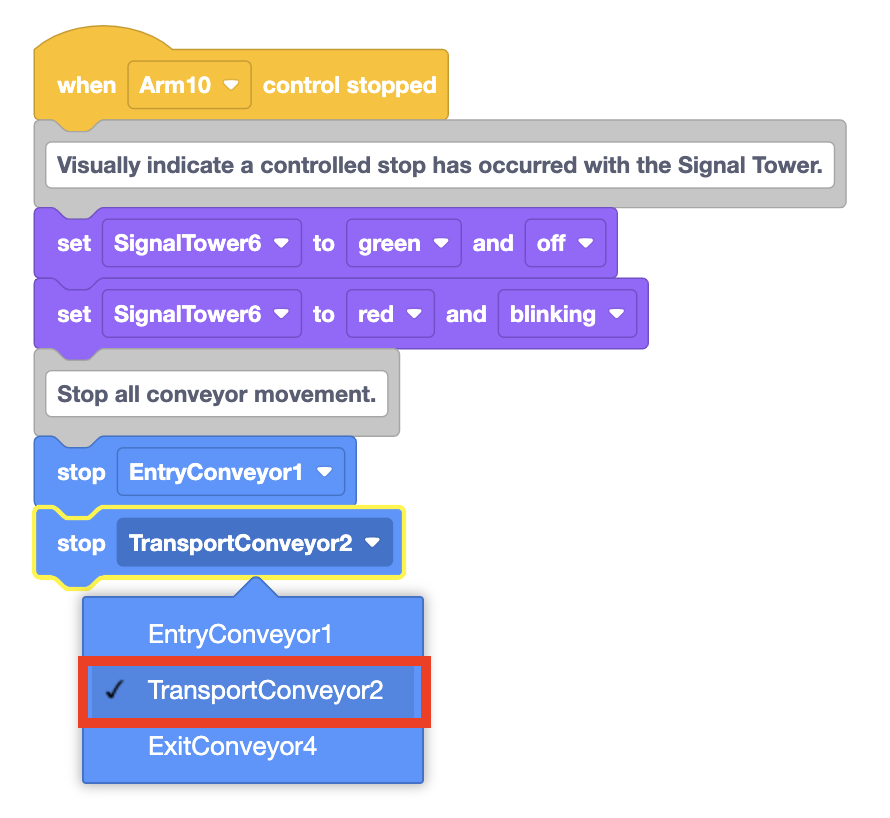
Añade un tercer bloque Stop motor a la pila. Cambie el parámetro a 'ExitConveyor4'.
Creación de un proyecto para transportar un disco mediante cintas transportadoras
Ahora que ha configurado los motores del transportador y modificado la parada controlada, puede comenzar a construir un proyecto para transportar un disco utilizando los transportadores. Comenzarás a construir un proyecto para que el disco viaje desde el transportador de entrada, a lo largo del transportador de transporte hasta el transportador de salida. Para ello es necesario coordinar cuidadosamente el movimiento del disco a lo largo de las cintas transportadoras. Una forma de lograr esta coordinación es crear un proyecto utilizando movimientos basados en el tiempo, como se muestra en el vídeo a continuación.
Movimientos basados en el tiempo
Al utilizar una combinación de bloques Esperar, Girary Detener motor , puede crear un proyecto en el que cada transportador comienza y se detiene en el momento adecuado para transferir un disco de un transportador al siguiente. Esta forma de codificar los transportadores se denomina uso de movimientos basados en el tiempo.
Construyendo el proyecto
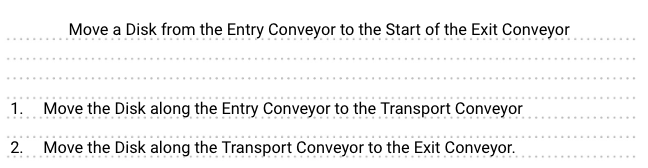
Registre los pasos de planificación necesarios para mover el disco, como los que se muestran en la imagen aquí, en su cuaderno de ingeniería.
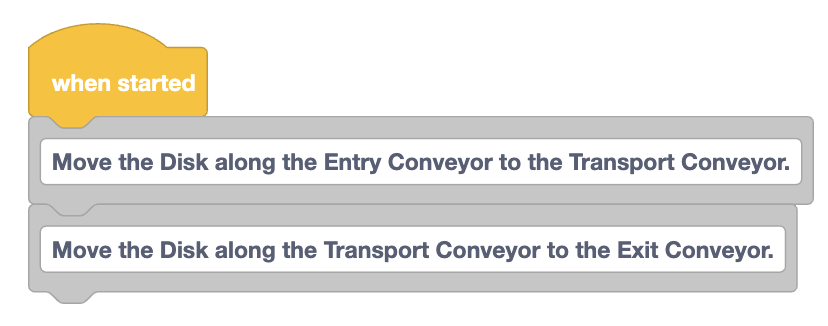
Crea bloques de comentarios para cada paso de tu plan y adjúntalos al bloque Cuando comience .
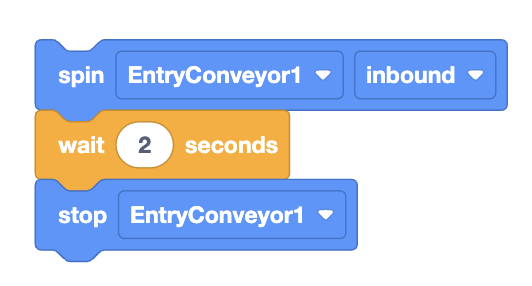
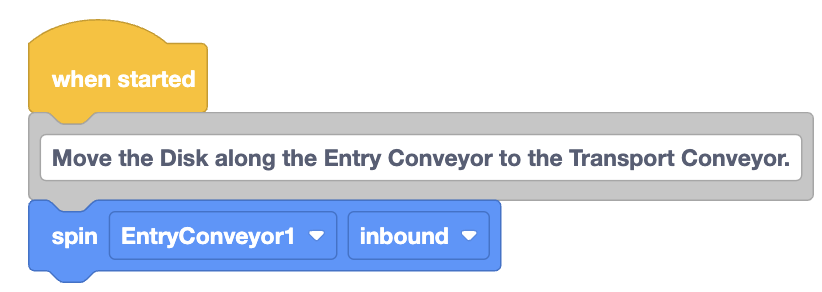
Coloque un bloque Spindebajo de los primeros Comentarios.
El disco comienza en el transportador de entrada y en la dirección del transportador de transporte, por lo que los parámetros pueden permanecer establecidos en 'EntryConveyor1' y 'inbound'.
El bloqueSpinhará girar el motor eternamente hasta que se le indique que lo detenga.
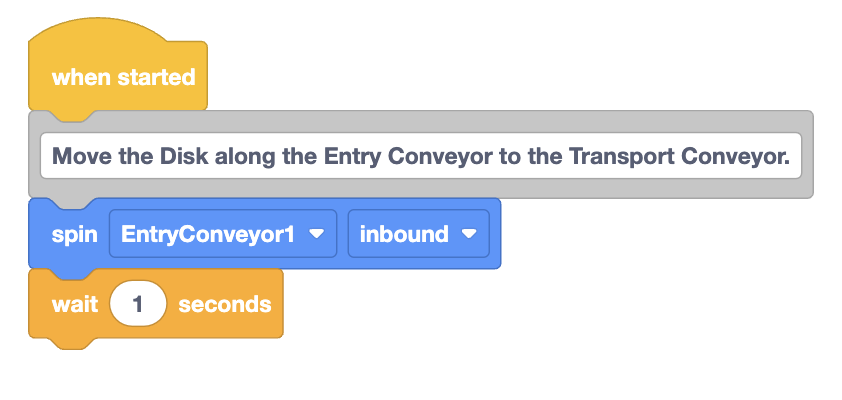
A continuación, adjunte un bloque Espera.
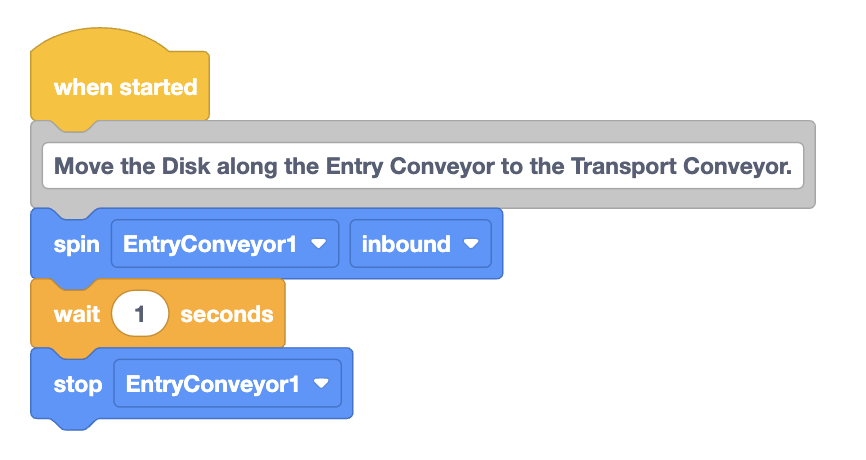
Coloque un bloque de motor de parada en la parte inferior de la pila de bloques. Asegúrese de que el parámetro esté configurado como 'EntryConveyor1'.
Haz una predicción sobre lo que crees que sucederá cuando se ejecute el proyecto. Regístrelo en su cuaderno de ingeniería.
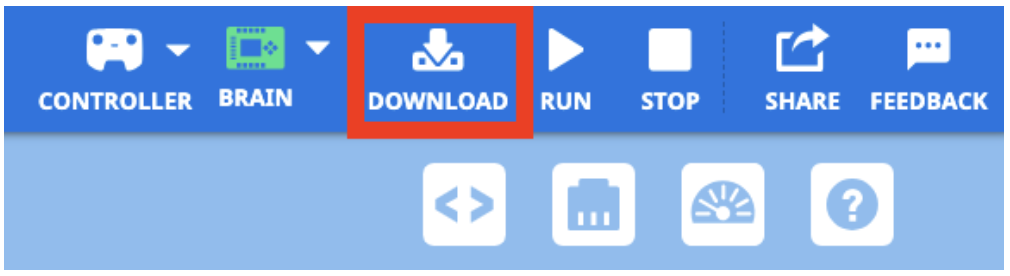
Asegúrese de que el cerebro esté conectado a VEXcode y descargue el proyecto al cerebro.
Asegúrese de colocar un disco verde en el inicio del transportador de entrada, como se muestra aquí. Presione el botón Check en el cerebro para ejecutar el proyecto y probarlo.
Observar el comportamiento del transportador. ¿Transporta el disco hasta el final del transportador de entrada? ¿Por qué o por qué no?
Cuando el transportador haya dejado de moverse, presione el botón X en el cerebro para detener el proyecto. Registra tus observaciones en tu cuaderno de ingeniería.

Sincronización del transportador
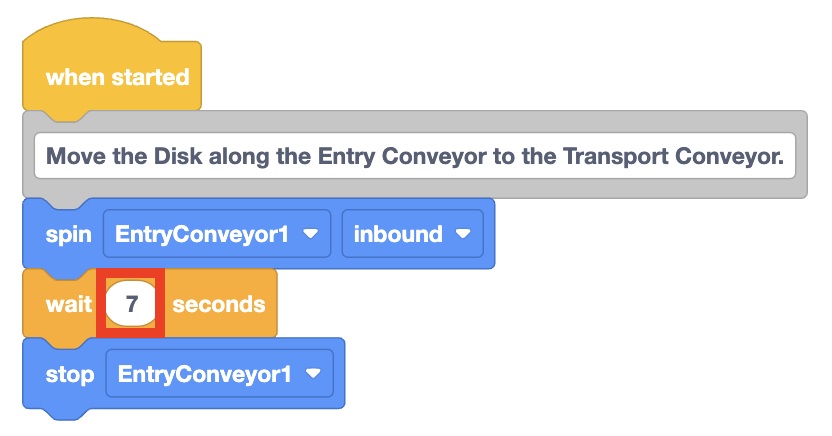
Cuando ejecutó su proyecto, probablemente notó que el transportador de entrada no movió el disco completamente hasta el transportador de transporte. Esto se debe a que el parámetro en el bloque Esperar solo está establecido en 1 segundo. More time is needed for the Entry Conveyor to spin, before the Stop motor block is run.
A medida que crea y prueba un proyecto utilizando movimientos basados en el tiempo, es posible que necesite ajustar el parámetro en el bloque Esperar más de una vez para lograr el tiempo correcto.
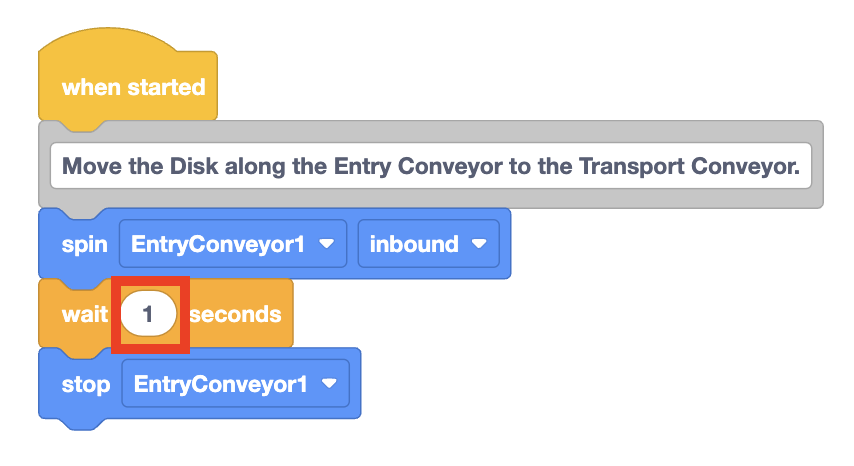
Ajuste el parámetro en el bloque Espere a 7 segundos y descargue y ejecute el proyecto nuevamente para probar.
¿El transportador de entrada transportó el disco hasta el final, donde podía ser recogido por el transportador? En caso contrario, ajuste el parámetro nuevamente hasta que lo haga.
Nota:La cantidad de segundos necesarios en el parámetro puede variar. Utilice números que funcionen de manera confiable para su base de celda de trabajo CTE.
Añade los bloques necesarios para mover el disco a lo largo de la cinta transportadora.
Tenga en cuenta que estos son los mismos bloques que se utilizan para el transportador de entrada, solo que con los parámetros establecidos en 'TransportConveyor2' y 'adelante'.
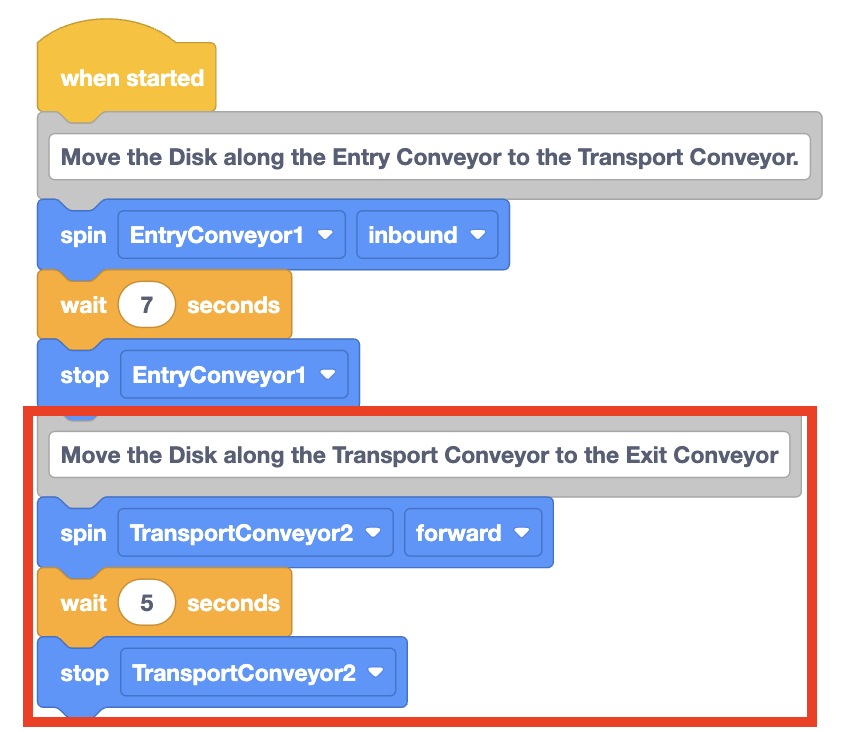
Descargue el proyecto en Brain y ejecútelo para probarlo. ¿El disco se desplaza a lo largo de la cinta transportadora y se detiene en el desviador? En caso contrario, ajuste el parámetro del bloque Esperehasta que lo haga.
Para tu información
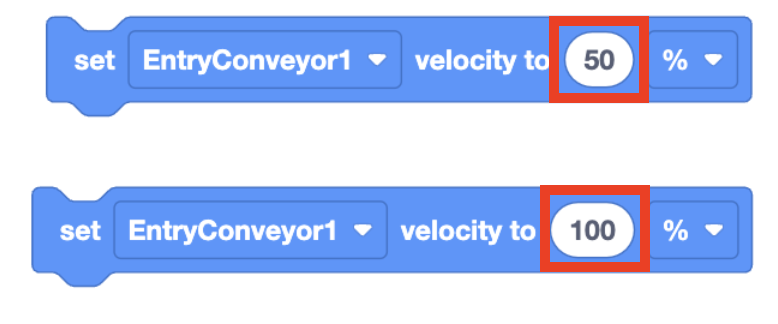
La velocidad a la que viajan los objetos a lo largo de una cinta transportadora se puede modificar utilizando el bloque velocidad del motor . El parámetro en el bloque se puede cambiar para hacer que el transportador gire más rápido o más lento. La velocidad predeterminada del transportador es del 50% y la velocidad máxima es del 100%.
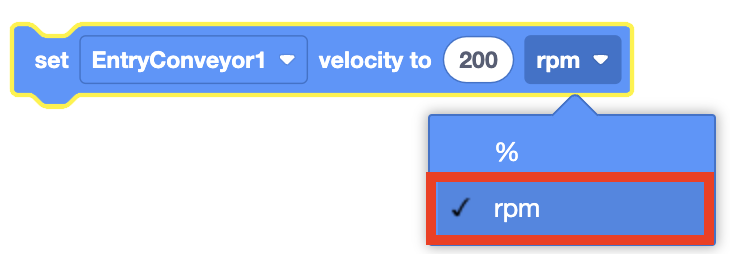
El parámetro del bloque Establecer velocidad del motor también se puede configurar usando rpm o rotaciones por minuto.
Actividad
Ahora que ha utilizado movimientos basados en el tiempo para codificar los transportadores para mover un disco desde el transportador de entrada y a lo largo del transportador de transporte hasta el transportador de salida, continuará con su proyecto para mover el disco hasta el final del transportador de salida sin caerse del extremo del transportador.
Configuración:Coloque un disco al comienzo del transportador de entrada como se muestra a continuación.
Actividad: Cree un proyecto VEXcode que transportará un disco desde el transportador de entrada, a lo largo del transportador de transporte, hasta el final del transportador de salida.
- Planifique cómo desarrollará su proyecto para mover el disco hasta el final del transportador de salida.
- Documente su plan en su cuaderno de ingeniería.
- Cambie el nombre de su proyecto Unidad 4 Lección 2 Actividad y guárdelo en su dispositivo antes de comenzar a editar el proyecto.
- Edite el proyecto en VEXcode para que coincida con el plan acordado por su grupo.
- Coloque un disco en el punto de inicio del transportador de entrada y ejecute el proyecto. ¿Los transportadores mueven el disco hasta el final del transportador de salida sin caerse? Detenga el proyecto cuando los transportadores hayan terminado de moverse y registre sus observaciones en su cuaderno de ingeniería.
- Si el disco se cae del extremo del transportador de salida, edite su proyecto hasta que un disco llegue al final del transportador sin caerse. Documente cualquier cambio en su cuaderno de ingeniería.
Comprueba tu comprensión
Antes de pasar a la siguiente lección, asegúrese de comprender los conceptos de esta lección respondiendo las siguientes preguntas en su cuaderno de ingeniería.
Comprueba tus preguntas de comprensión > ( Google Doc / .docx / .pdf )
Seleccione Siguiente > para pasar a la Reflexión de mitad de unidad.