
Leçon 2 : Codage des convoyeurs
Auparavant, vous avez découvert les convoyeurs et les déviateurs, et comment ils permettent un transport efficace des matériaux dans les environnements industriels. Vous avez également appris comment fonctionnent les convoyeurs de la cellule de travail CTE. Vous êtes maintenant prêt à commencer à coder les convoyeurs pour transporter les disques. Dans cette leçon, vous apprendrez :
- Comment configurer des moteurs de convoyeur individuels dans VEXcode.
- Comment créer un projet VEXcode pour déplacer des disques d'un convoyeur à un autre à l'aide de mouvements basés sur le temps.
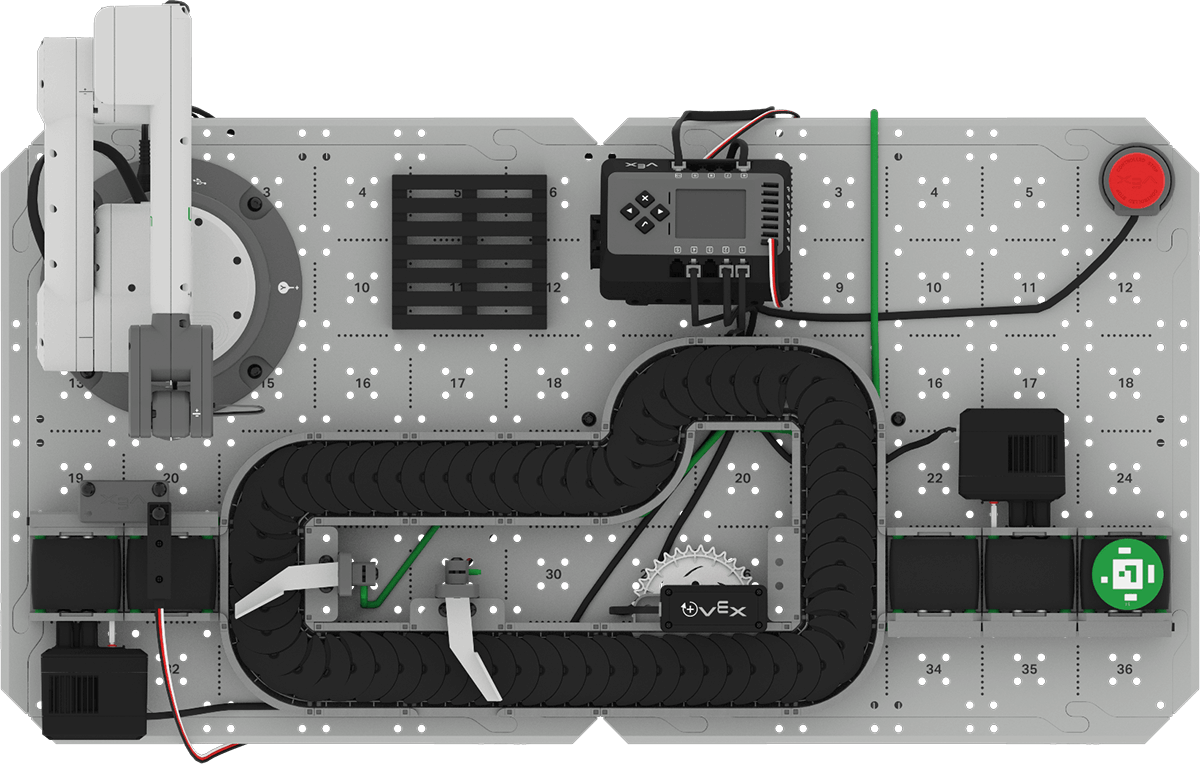
À la fin de cette leçon, vous construirez un projet permettant de transporter un disque depuis le convoyeur d’entrée, en passant par le convoyeur de transport et jusqu’au convoyeur de sortie.
Se préparer à coder les convoyeurs
Avant de pouvoir coder les convoyeurs sur la cellule de travail CTE, vous devez effectuer certaines tâches importantes pour vous préparer. Vous devrez configurer chaque moteur de convoyeur individuellement dans VEXcode. Vous devrez également modifier la pile de blocs qui déclenchent un arrêt contrôlé, pour être sûr que tous les moteurs du convoyeur sont inclus.
Configuration de moteurs individuels dans VEXcode
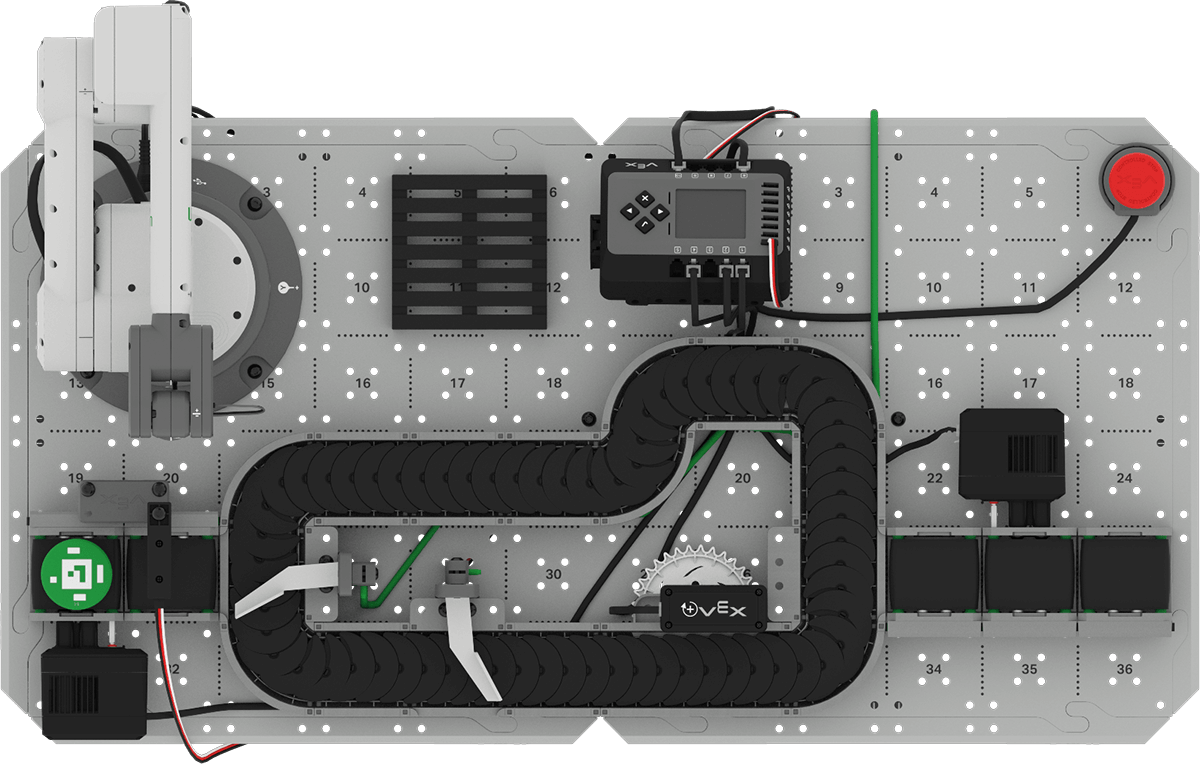
Chaque convoyeur de la cellule de travail CTE est contrôlé par un moteur séparé. Pour cette raison, vous devrez ajouter chaque moteur à la configuration dans VEXcode avant de pouvoir commencer votre projet. De plus, vous devrez vous assurer que chaque moteur est nommé correctement et qu'il est configuré pour tourner dans la direction nécessaire pour transporter avec succès les matériaux.
Configuration du moteur du convoyeur d'entrée
Ouvrez le projet Brain CTE 6-Axis Arm Base Template.
Remarque :Pour un rappel sur la façon d’ouvrir des exemples dans VEXcode EXP, reportez-vous à l’unité précédente.

Renommez le projet en Unité 4 Leçon 2et enregistrez-le sur votre appareil.

Ouvrez la fenêtre Appareils.

Sélectionnez Ajouter un appareil.

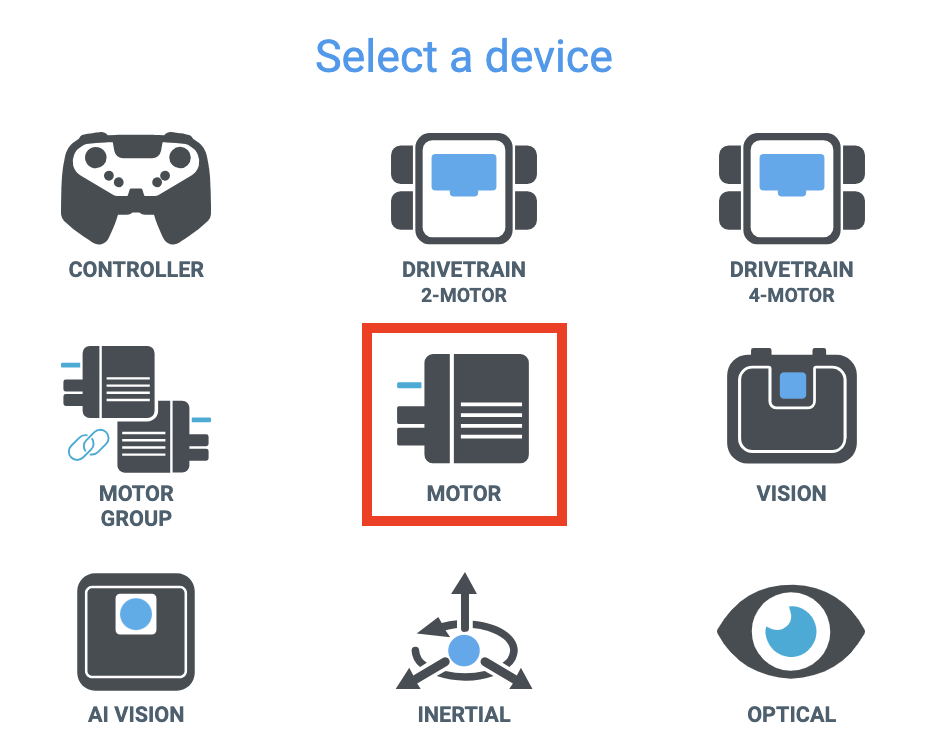
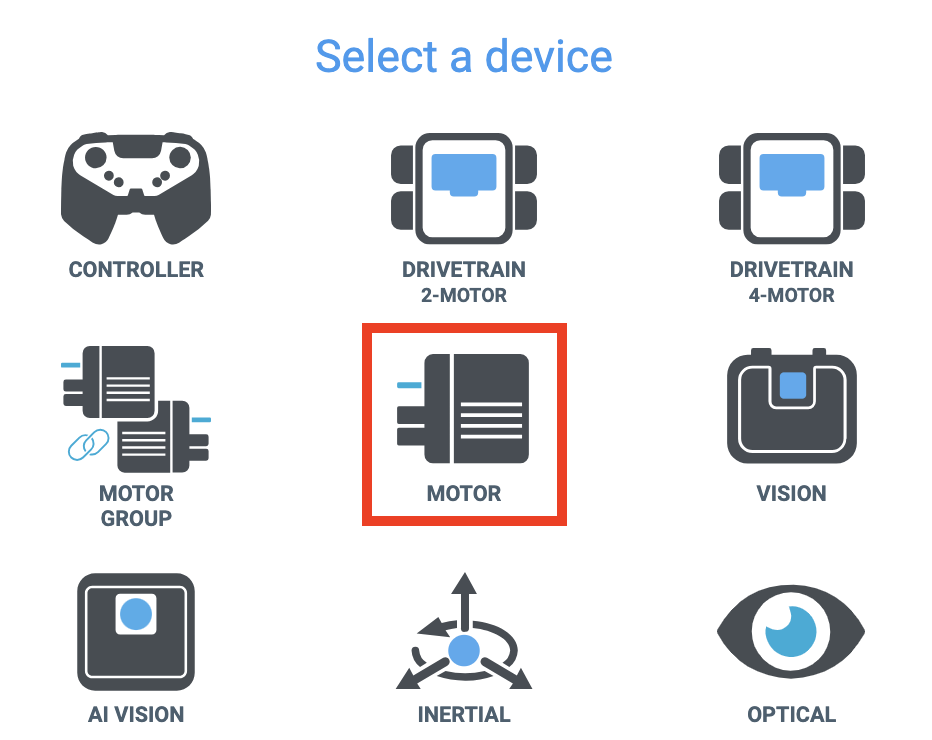
Sélectionnez Moteur dans la liste des périphériques.
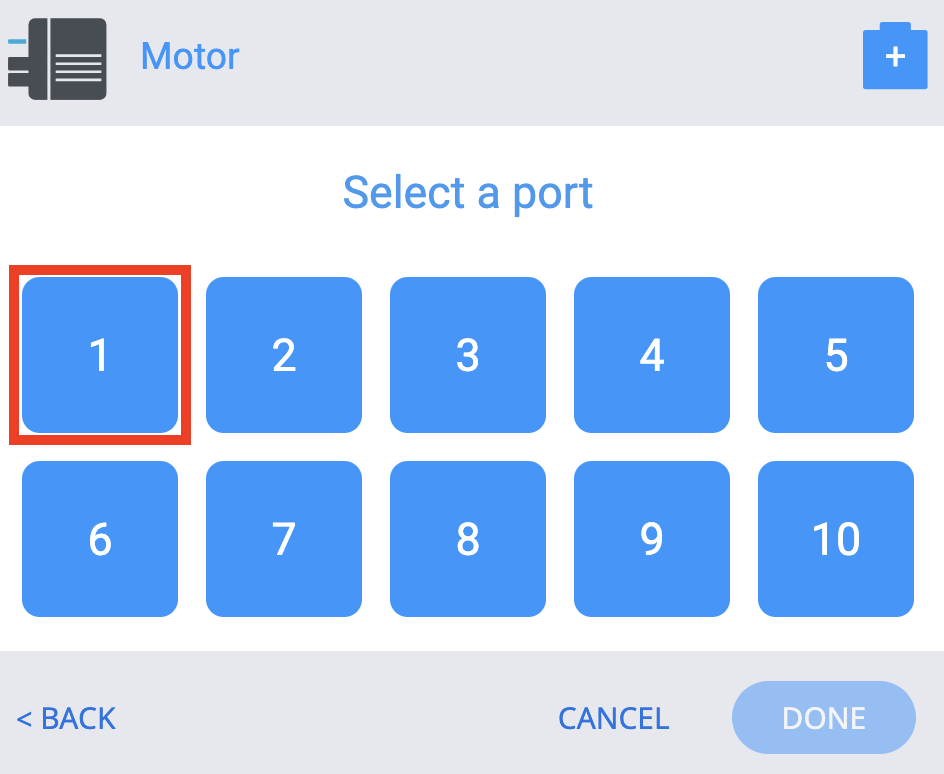
Sélectionnez le port 1 sur le cerveau pour qu'il corresponde au port sur lequel le moteur du convoyeur d'entrée est branché.
Remarque :Assurez-vous que le moteur du convoyeur d'entrée est branché sur le port 1 du Brain.
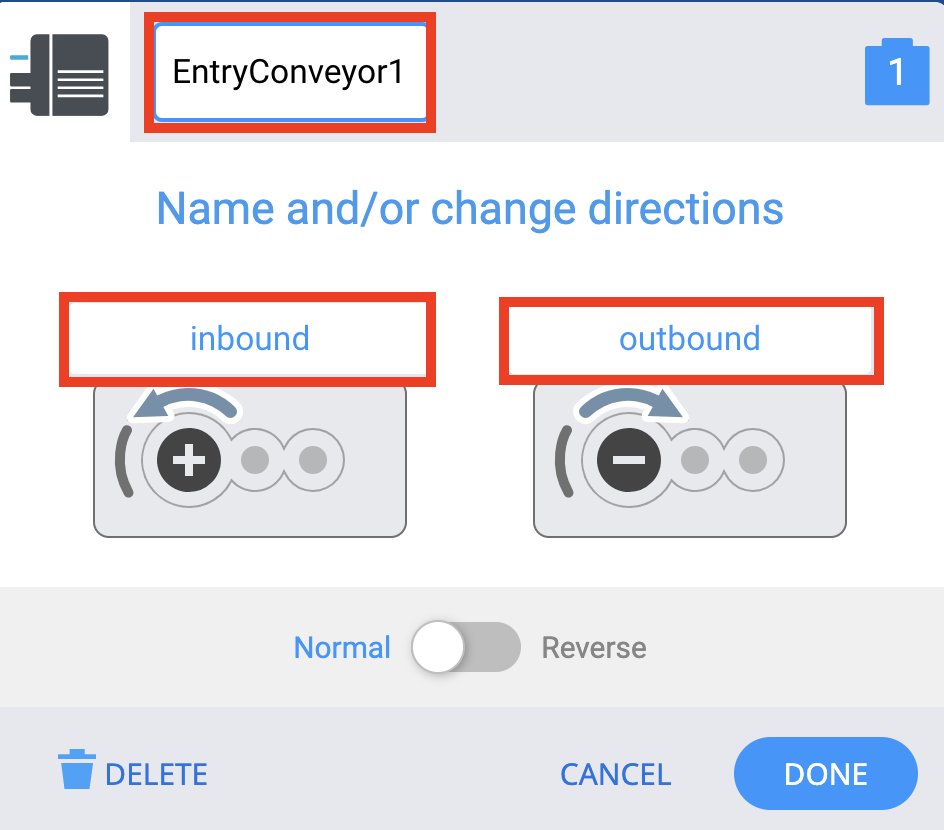
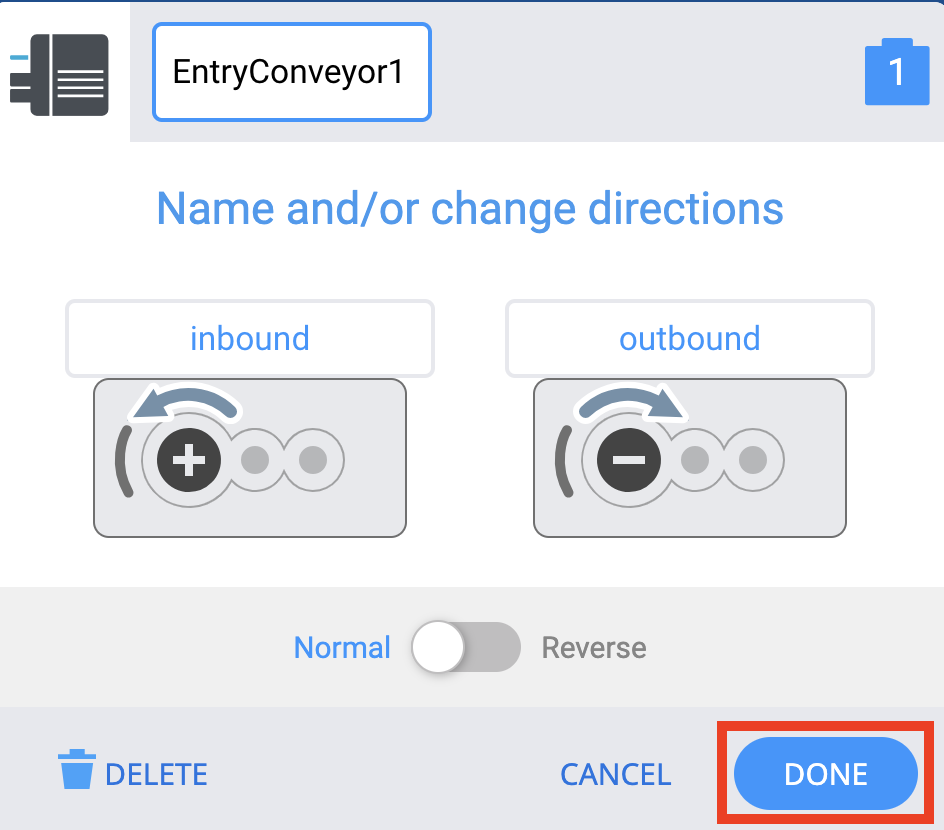
Modifiez les étiquettes pour qu'elles correspondent à cette image.
- Le moteur doit être renommé pour l'identifier clairement comme moteur de convoyeur d'entrée. Le numéro dans le nom fait référence au port sur lequel il est branché.
- Les directions du moteur doivent également être renommées en entrant et sortant, car les étiquettes par défaut avant et arrièrene décrivent pas correctement le mouvement des convoyeurs.
Entrant signifie que le convoyeur d'entrée tourne vers le convoyeur de transport. Sortantsignifie que le convoyeur d'entrée tourne loin du convoyeur de transport.
Sélectionner Terminé.
Configuration du moteur du convoyeur de sortie
Le moteur du convoyeur de sortie peut être configuré de la même manière que le moteur du convoyeur d'entrée.
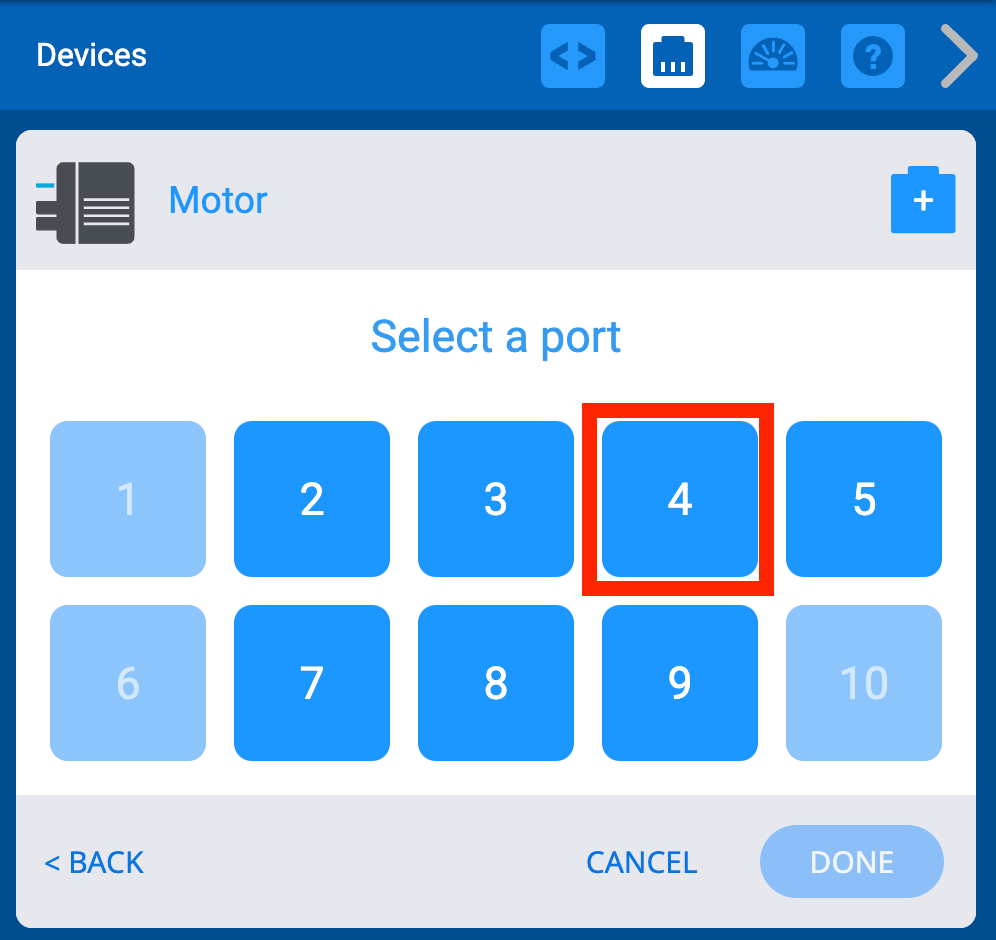
Dans la fenêtre Appareils, sélectionnez Moteur dans la liste des appareils.

Sélectionnez le port 4 pour correspondre au port sur lequel le moteur du convoyeur de sortie est branché.
Remarque :Assurez-vous que le moteur du convoyeur de sortie est branché sur le port 4 du Brain.
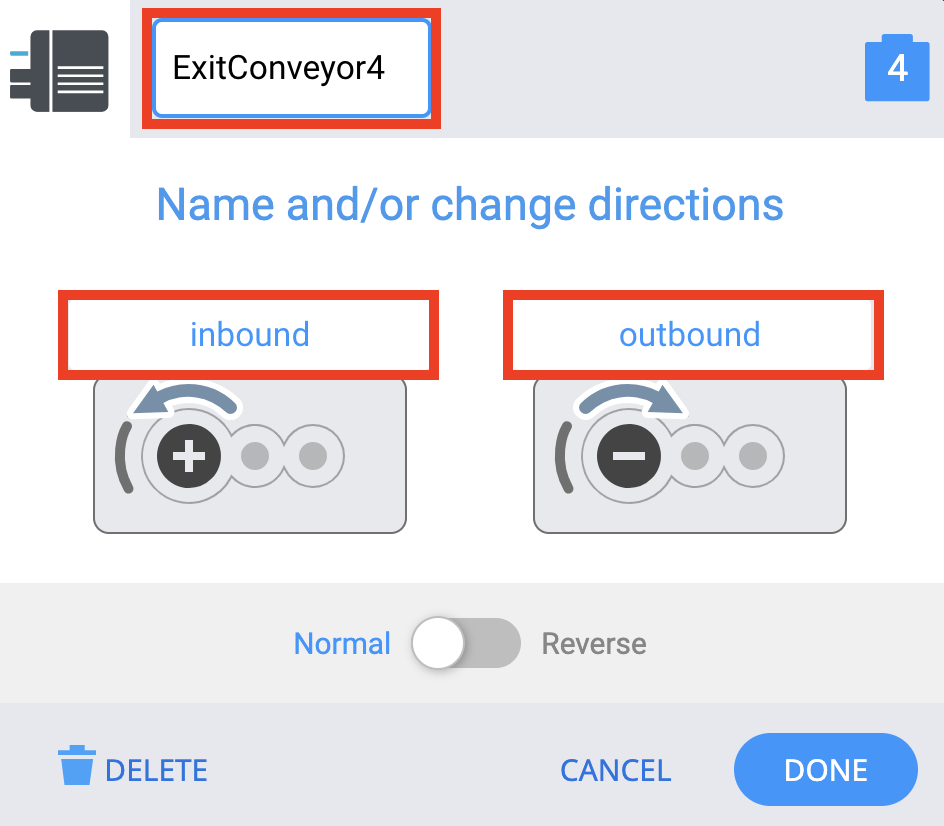
Modifiez les étiquettes pour qu'elles correspondent à celles de l'image.
- Le moteur doit être renommé pour l'identifier clairement comme moteur du convoyeur de sortie. Le numéro dans le nom fait référence au port sur lequel il est branché.
- Les directions du moteur doivent également être renommées enentrantetsortant,comme vous l'avez fait précédemment pour le convoyeur d'entrée.
Entrantsignifie que le convoyeur de sortie tourneversle convoyeur de transport. Sortantsignifie que le convoyeur de sortie tourneloin du convoyeur de transport.
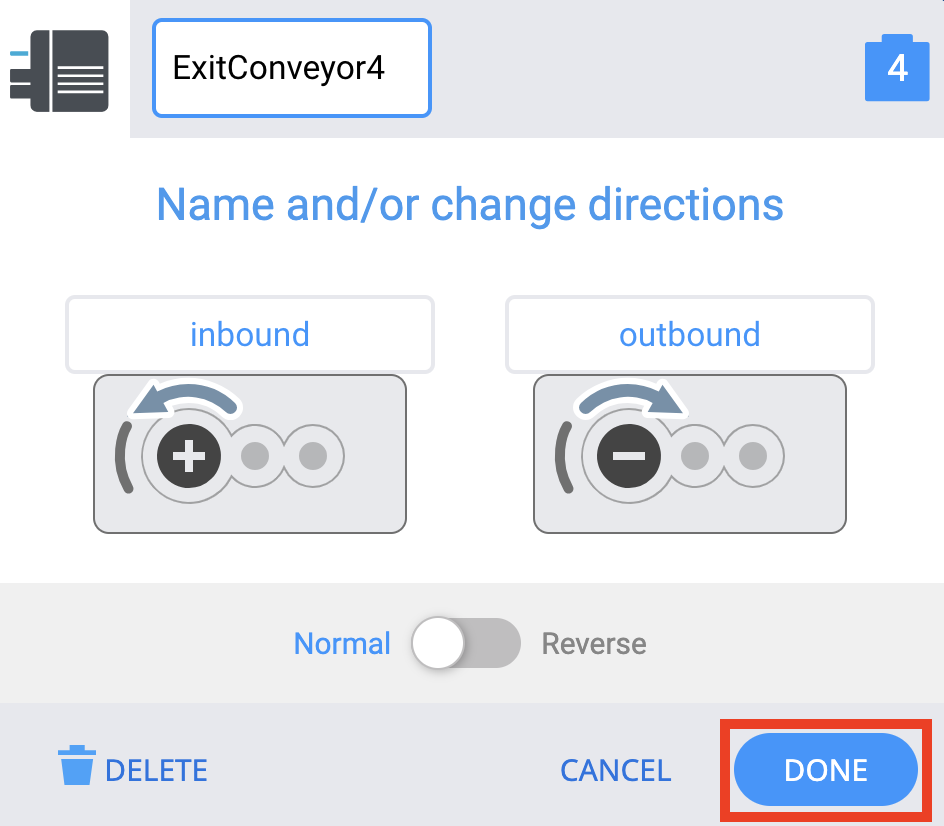
Sélectionnez Terminé.
Configuration du moteur du convoyeur de transport
Enfin, vous devrez configurer le moteur du convoyeur de transport. De plus, vous devrez inverser le sens du moteur pour que le convoyeur se déplace dans la direction souhaitée.
Dans la fenêtre Appareils, sélectionnez Moteur dans la liste des appareils.
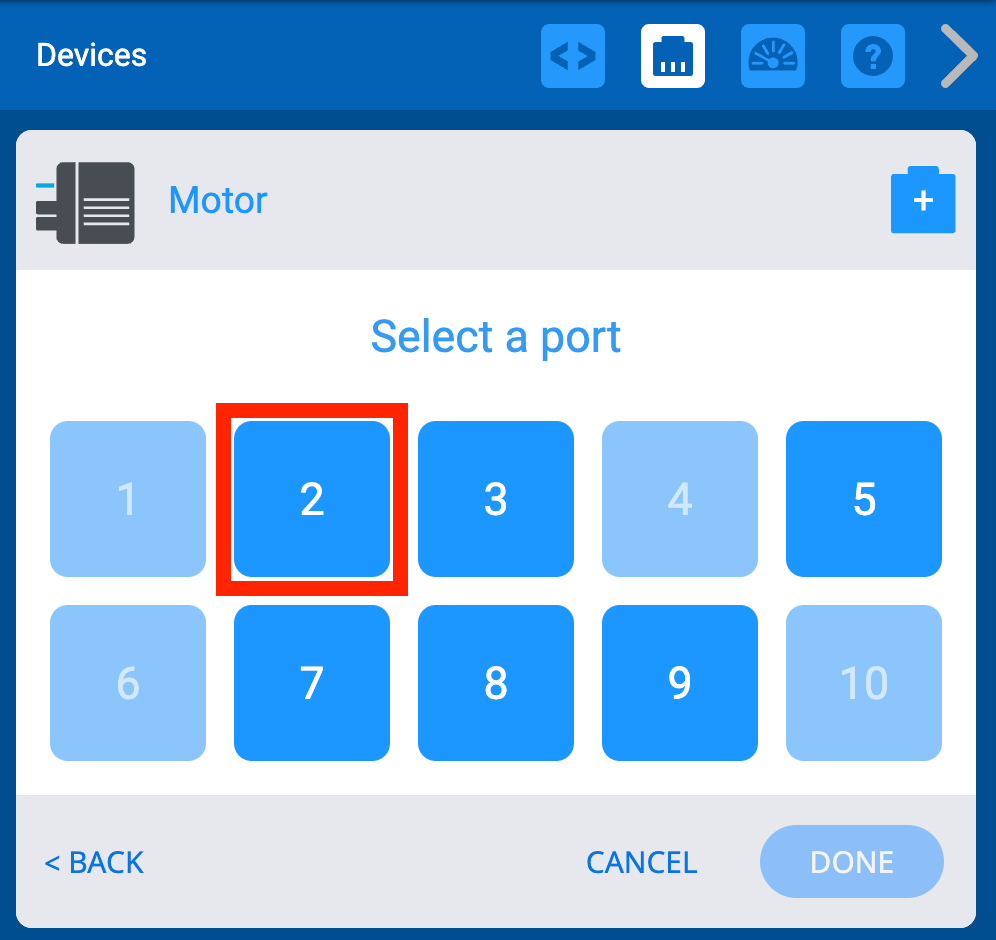
Sélectionnez le port 2 pour correspondre au port sur lequel le moteur du convoyeur de transport est branché.
Remarque :Assurez-vous que le moteur du convoyeur de transport est branché sur le port 2 du Brain.
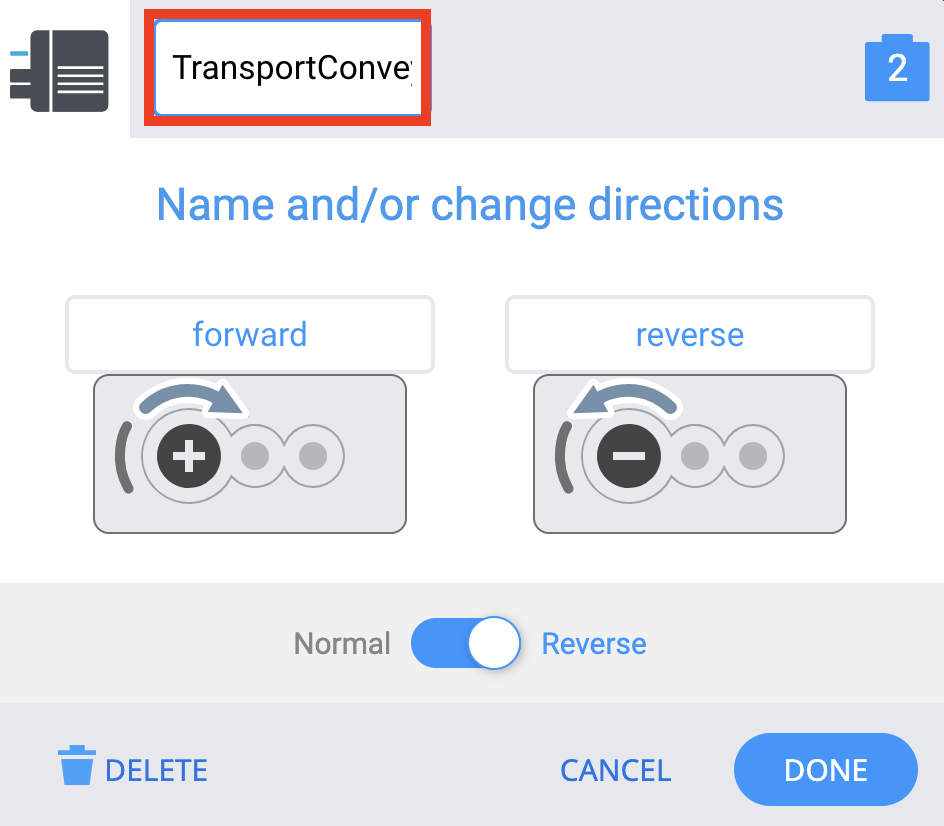
Renommer le moteur en TransportConveyor2.
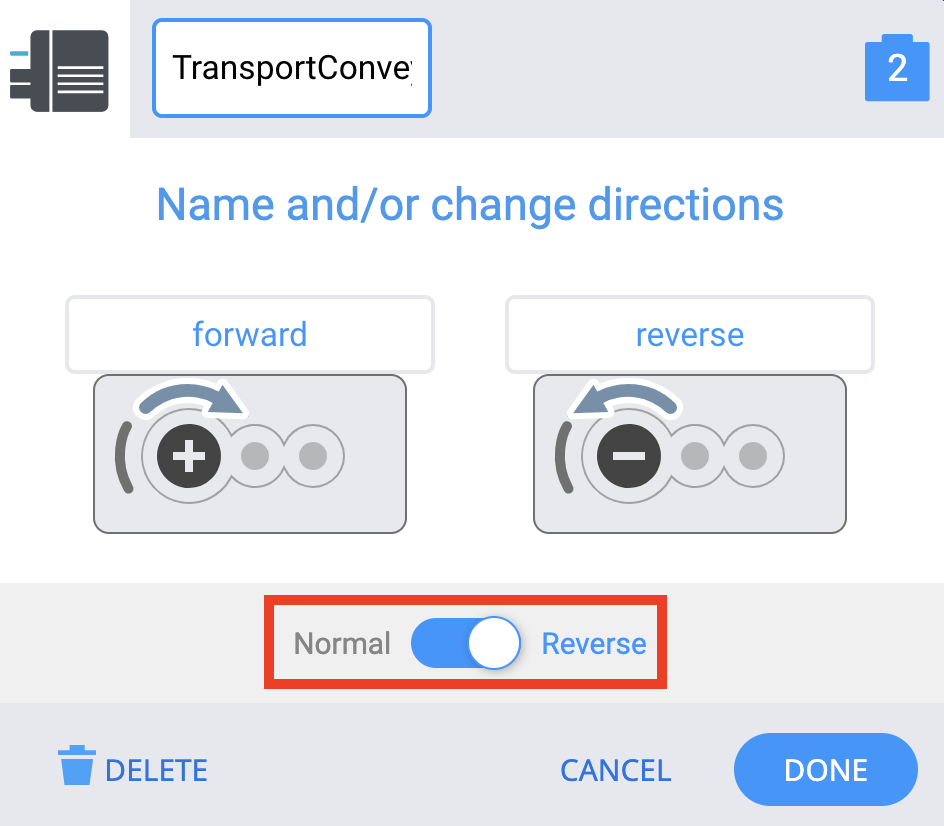
Pour que le convoyeur de transport déplace les matériaux dans la bonne direction, vous devrez sélectionner le bouton bascule pour changer le sens du moteur de Normal à Inversé.
Sens de rotation du moteur du convoyeur de transport
Lors de la configuration du moteur du convoyeur de transport, vous avez dû inverser son sens. Cela est dû au fait que le moteur fera tourner le convoyeur de transport dans le sens des aiguilles d'une montre par défaut. Vous pouvez déterminer le sens de rotation par défaut d'un moteur en fonction de l'étiquette du moteur.
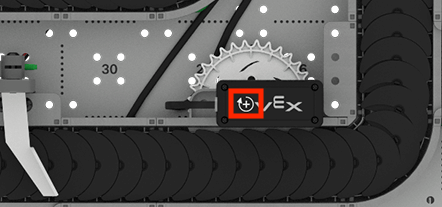
Sur le dessus de chaque moteur, il y a une icône indiquant quel sens est positif. Dans le cas du convoyeur de transport, la flèche pointe dans le sens des aiguilles d'une montre. Cela signifie que par défaut, tout disque placé sur le convoyeur de transport tournera du convoyeur d'entrée vers le premier déviateur. En inversant le moteur dans la configuration, vous vous assurez que le sens avantcorrespond à ce qui est discuté comme le chemin correct le long du convoyeur.
Modification de l'arrêt contrôlé
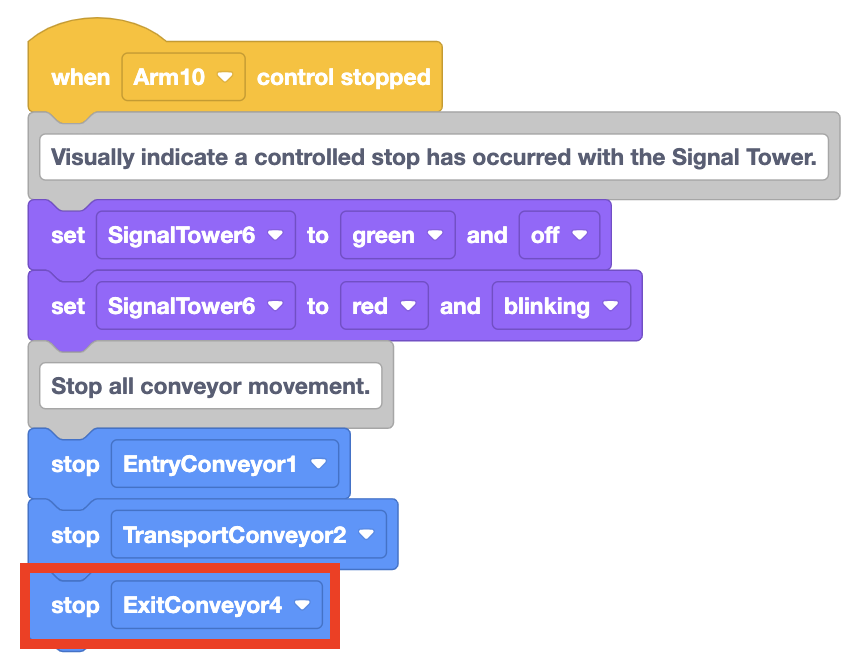
Maintenant que vous avez configuré tous les moteurs du convoyeur, vous devez mettre à jour l'arrêt contrôlé. Lorsqu'un arrêt contrôlé est déclenché, tous les moteurs doivent cesser de fonctionner, afin que vous puissiez être sûr que la base de la cellule de travail CTE peut se déplacer en toute sécurité. Vous allez ajouter des blocs au blocLorsque l'arrêt contrôlé est effectué,pour arrêter ces moteurs de convoyeur.
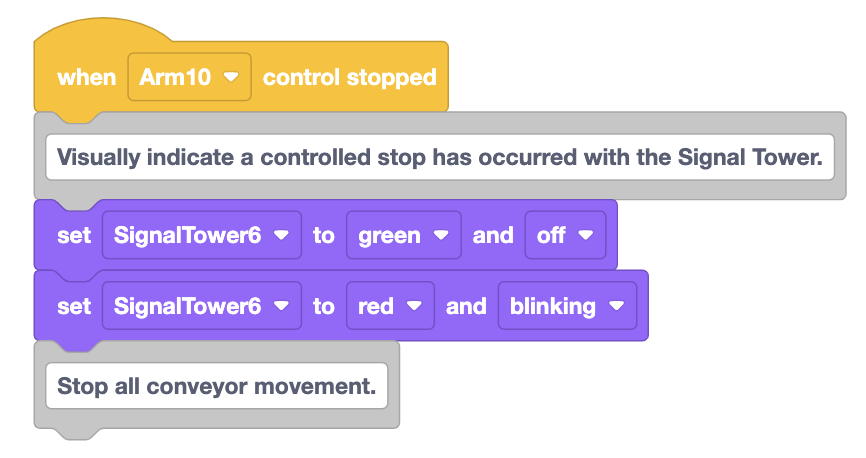
Créez un commentaire décrire les comportements du convoyeur nécessaires lors d'un arrêt contrôlé.

Ajoutez le blocCommentaire à la pile de blocs existante.
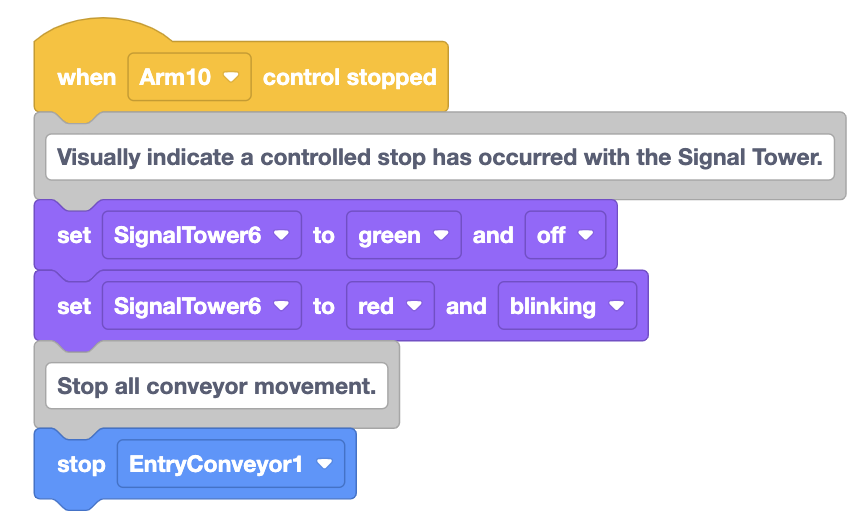
Faites glisser un bloc moteur Stop pour arrêter le convoyeur d'entrée et attachez-le à la pile de blocs.
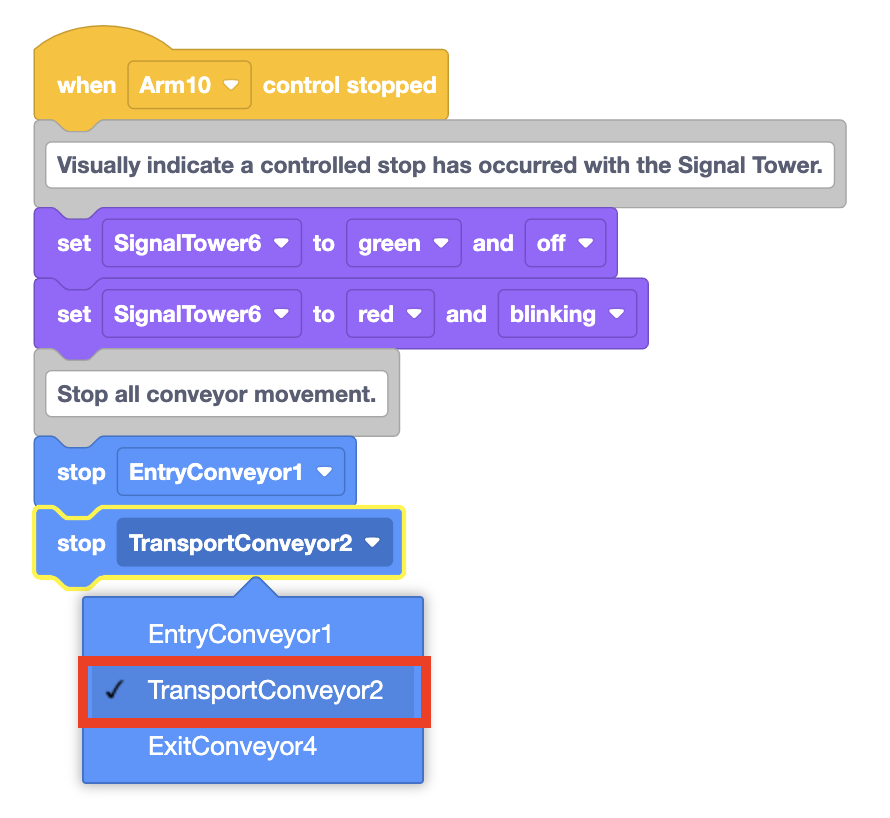
Faites glisser un autre bloc Stop moteur et fixez-le au bas de la pile de blocs.
Sélectionnez la flèche pour ouvrir le menu déroulant et sélectionnez « TransportConveyor2 » pour définir le paramètre permettant d'arrêter le convoyeur de transport lors d'un arrêt contrôlé.
Ajoutez un troisième bloc Stop moteur à la pile. Modifiez le paramètre sur « ExitConveyor4 ».
Création d'un projet pour transporter un disque à l'aide des convoyeurs
Maintenant que vous avez configuré vos moteurs de convoyeur et modifié l'arrêt contrôlé, vous pouvez commencer à construire un projet pour transporter un disque à l'aide des convoyeurs. Vous commencerez à construire un projet pour que le disque se déplace du convoyeur d'entrée, le long du convoyeur de transport jusqu'au convoyeur de sortie. Pour ce faire, le mouvement du disque le long des convoyeurs doit être soigneusement coordonné. Une façon d’obtenir cette coordination est de créer un projet utilisant des mouvements basés sur le temps, comme le montre la vidéo ci-dessous.
Mouvements basés sur le temps
En utilisant une combinaison de blocs Attendre, Faire tourneret Arrêter le moteur , vous pouvez créer un projet dans lequel chaque convoyeur démarre et s'arrête au bon moment pour transférer un disque d'un convoyeur à l'autre. Cette façon de coder les convoyeurs est appelée « utilisation de mouvements basés sur le temps ».
Construire le projet
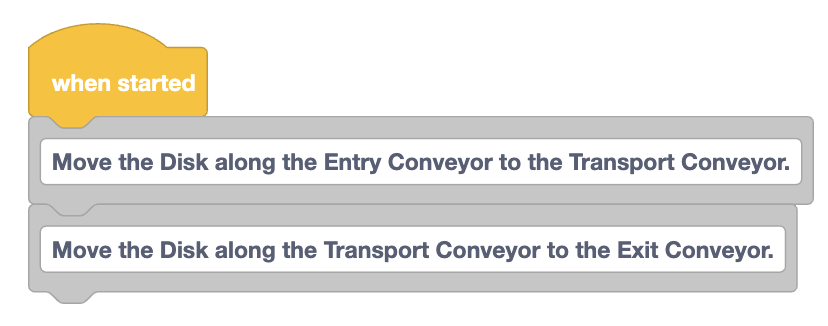
Notez les étapes de planification nécessaires pour déplacer le disque, comme celles illustrées dans l’image ici, dans votre carnet d’ingénierie.
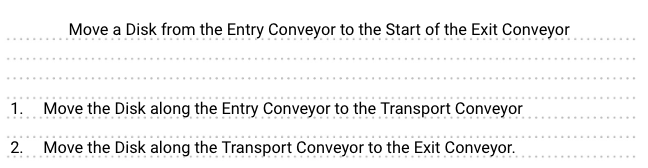
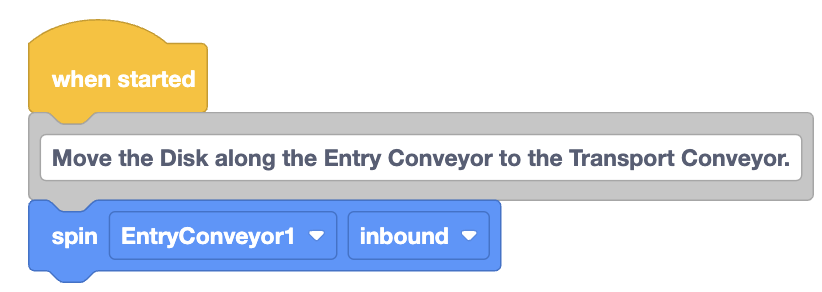
Créez bloc Commentaire pour chaque étape de votre plan et attachez-les au bloc Lorsque vous avez commencé .
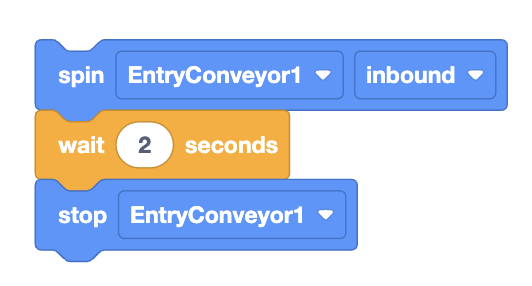
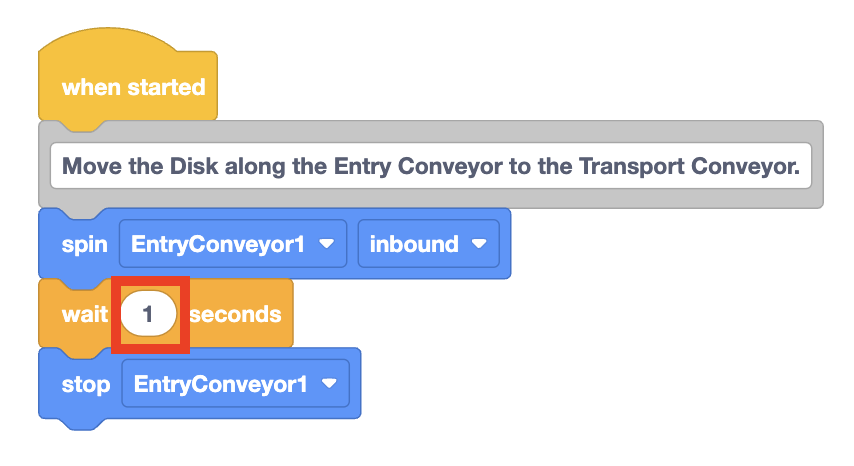
Attachez un bloc Spinsous les premiers commentaires.
Le disque démarre sur le convoyeur d'entrée et dans la direction du convoyeur de transport, les paramètres peuvent donc rester définis sur « EntryConveyor1 » et « inbound ».
Le blocSpinfera tourner le moteur pour toujours jusqu'à ce qu'on lui dise d'arrêter le moteur.
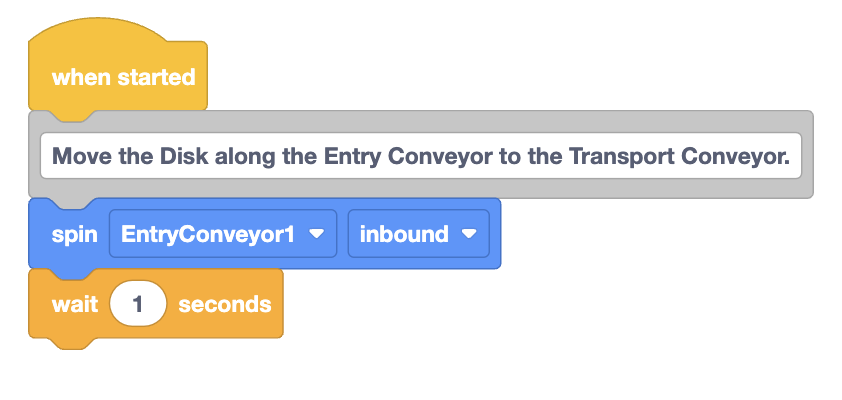
Ensuite, attachez un bloc Attendre.
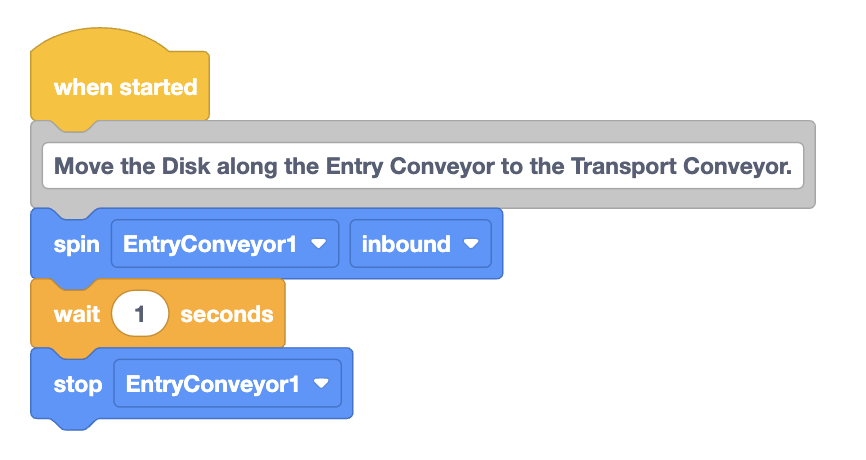
Fixez un bloc moteur Stopau bas de la pile de blocs. Assurez-vous que le paramètre est défini sur « EntryConveyor1 ».
Faites une prédiction sur ce qui, selon vous, se passera lorsque le projet sera exécuté. Notez-le dans votre cahier d’ingénierie.
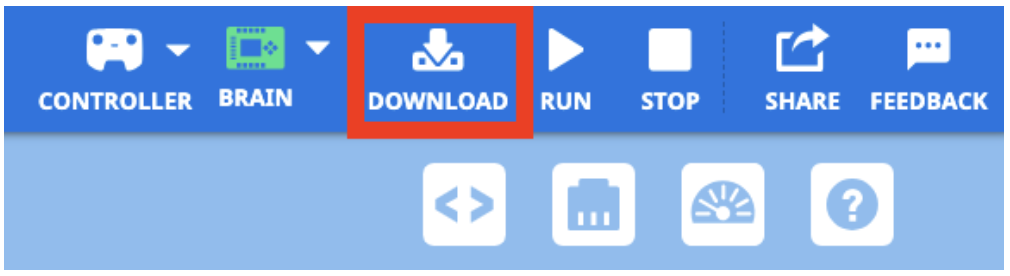
Assurez-vous que le cerveau est connecté à VEXcode et téléchargez le projet sur le cerveau.
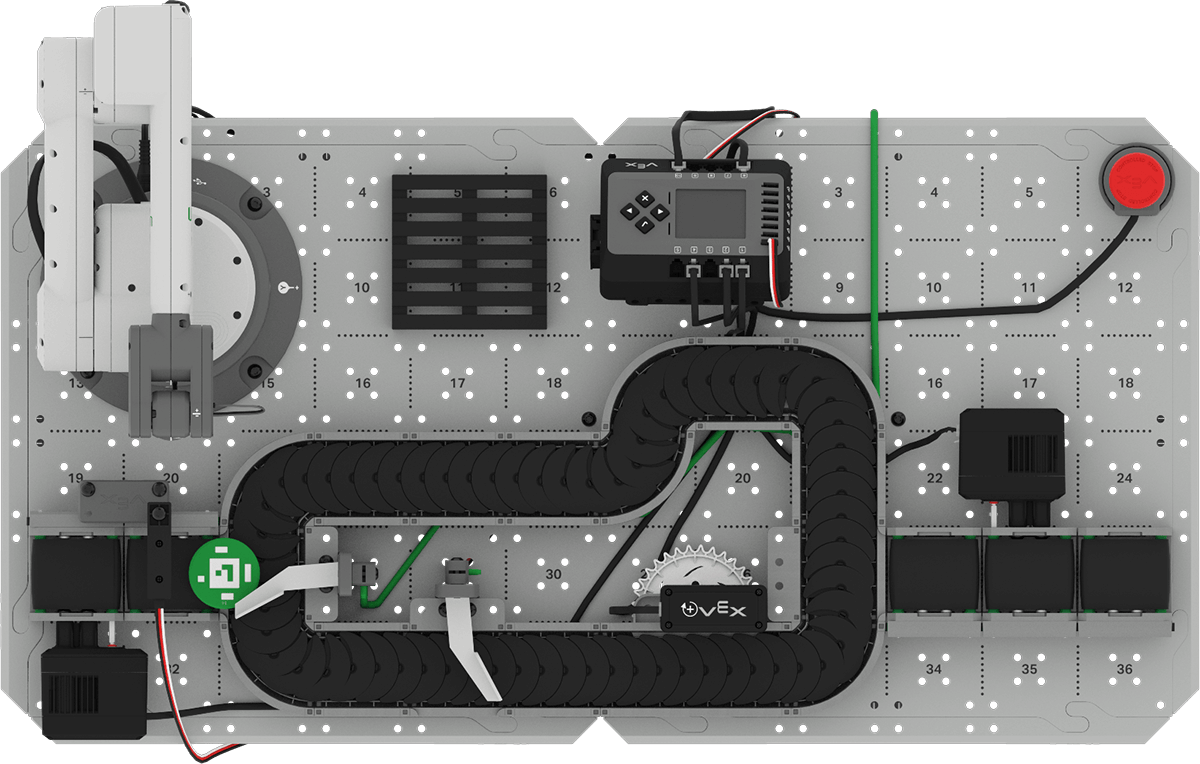
Assurez-vous qu'un disque vert est placé au début du convoyeur d'entrée, comme indiqué ici. Appuyez sur le bouton Check du Brain pour exécuter le projet afin de le tester.
Observer les comportements du convoyeur. Est-ce qu'il transporte le disque jusqu'à la fin du convoyeur d'entrée ? Pourquoi ou pourquoi pas ?
Lorsque le convoyeur s'est arrêté de bouger, appuyez sur le bouton X du Brain pour arrêter le projet. Notez vos observations dans votre carnet d’ingénierie.

Synchronisation du convoyeur
Lorsque vous avez exécuté votre projet, vous avez probablement remarqué que le convoyeur d’entrée ne déplaçait pas le disque jusqu’au convoyeur de transport. Cela est dû au fait que le paramètre du bloc Wait est défini sur 1 seconde seulement. Il faut plus de temps pour que le convoyeur d'entrée tourne avant que le bloc Arrêt du moteurne soit exécuté.
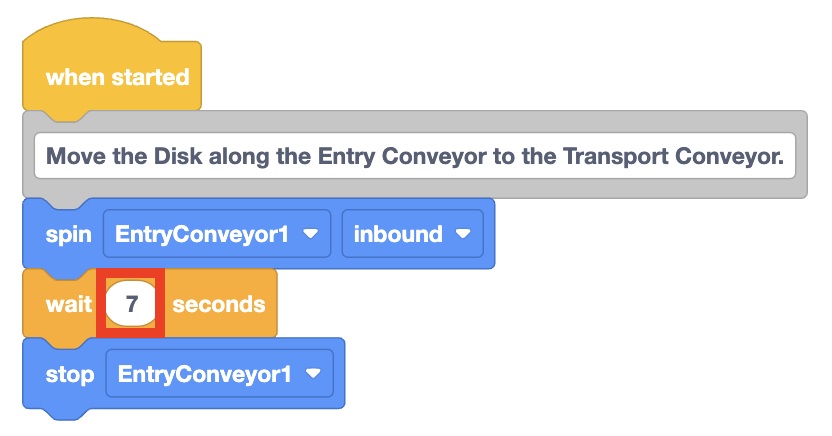
Au fur et à mesure que vous créez et testez un projet à l'aide de mouvements basés sur le temps, vous devrez peut-être ajuster le paramètre dans le bloc Attendre plusieurs fois pour obtenir le timing correct.
Ajustez le paramètre dans le bloc Attendre sur 7 secondes, puis téléchargez et exécutez à nouveau le projet pour tester.
Le convoyeur d'entrée a-t-il transporté le disque jusqu'à la fin, où il pouvait être récupéré par le convoyeur de transport ? Dans le cas contraire, ajustez à nouveau le paramètre jusqu’à ce qu’il le fasse.
Remarque :Le nombre de secondes nécessaires dans le paramètre peut varier. Utilisez des numéros qui fonctionnent de manière fiable pour votre base de cellule de travail CTE.
Ajoutez les blocs nécessaires pour déplacer le disque le long du convoyeur de transport.
Notez qu'il s'agit des mêmes blocs que ceux utilisés pour le convoyeur d'entrée, simplement avec les paramètres définis sur « TransportConveyor2 » et « forward ».
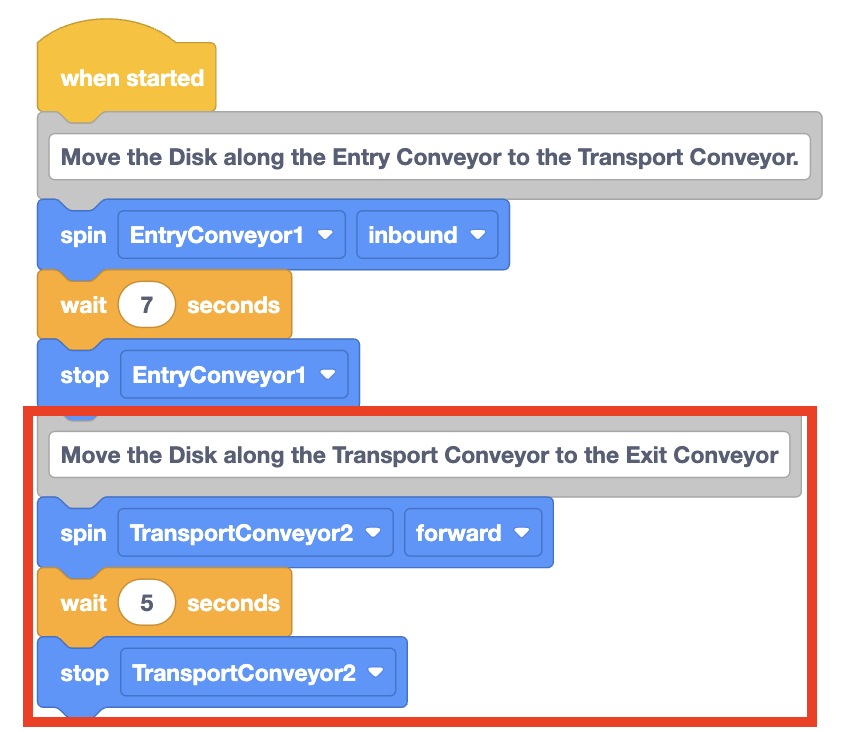
Téléchargez le projet sur le Brain et exécutez-le pour le tester. Le disque se déplace-t-il sur toute la longueur du convoyeur de transport, s'arrêtant au niveau du déviateur ? Dans le cas contraire, ajustez le paramètre du bloc Attendrejusqu'à ce que ce soit le cas.
Pour votre information
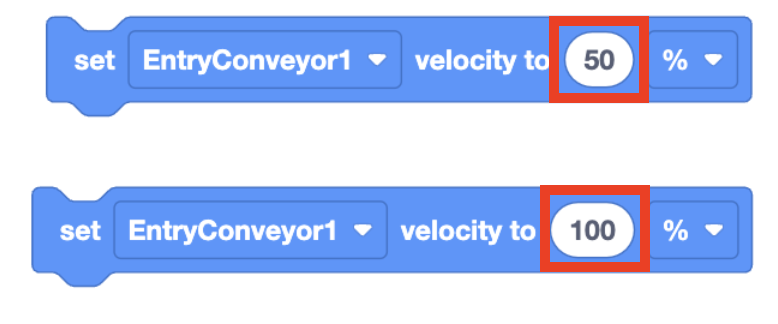
La vitesse à laquelle les objets se déplacent le long d'un convoyeur peut être modifiée à l'aide du bloc Définir la vitesse du moteur . Le paramètre du bloc peut être modifié pour faire tourner le convoyeur plus rapidement ou plus lentement. La vitesse par défaut du convoyeur est de 50 % et la vitesse maximale est de 100 %.
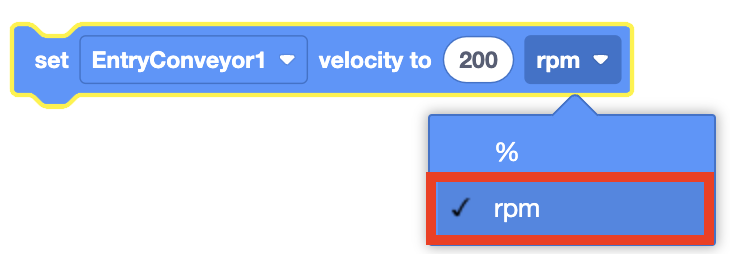
Le paramètre de bloc Set motor velocity peut également être défini à l'aide de tr/min ou de rotations par minute.
Activité
Maintenant que vous avez utilisé des mouvements basés sur le temps pour coder les convoyeurs afin de déplacer un disque du convoyeur d'entrée et le long du convoyeur de transport jusqu'au convoyeur de sortie, vous allez poursuivre votre projet pour déplacer le disque jusqu'à l'extrémité du convoyeur de sortie sans tomber de l'extrémité du convoyeur.
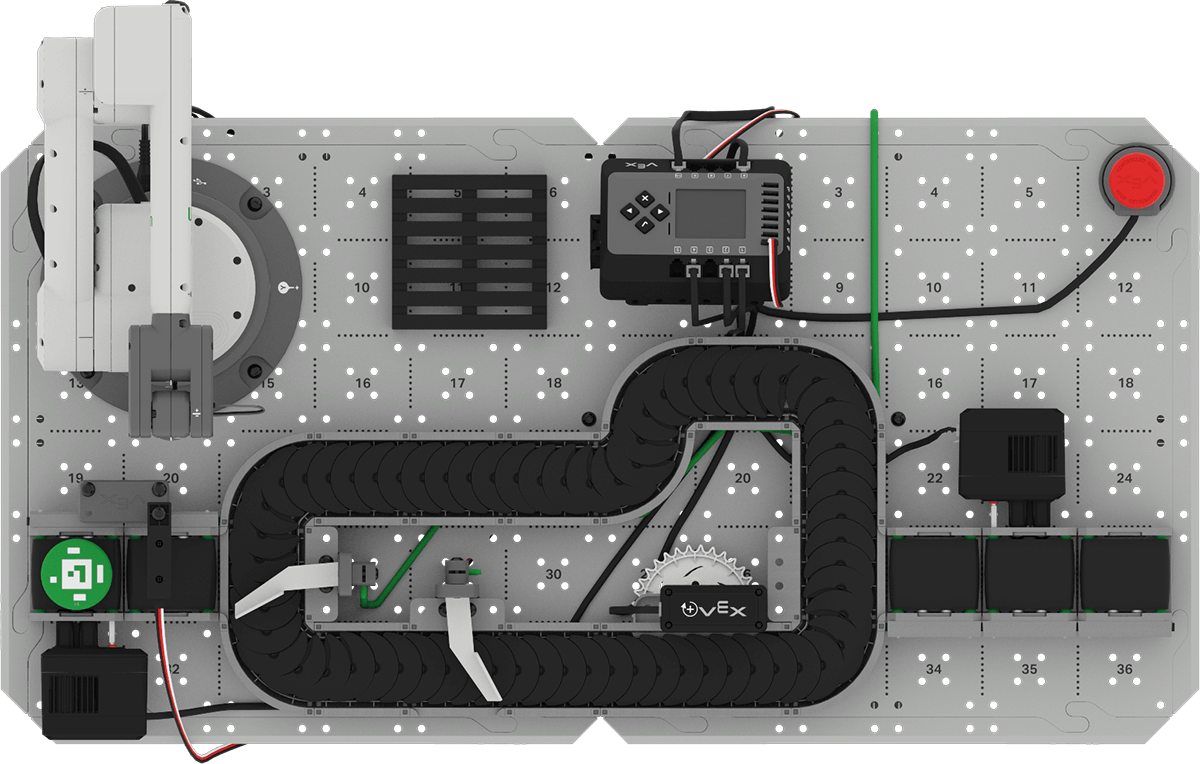
Configuration :Placez un disque au début du convoyeur d’entrée comme indiqué ci-dessous.
Activité : Créez un projet VEXcode qui transportera un disque depuis le convoyeur d'entrée, le long du convoyeur de transport, jusqu'à la fin du convoyeur de sortie.
- Planifiez la manière dont vous allez développer votre projet pour déplacer le disque jusqu'à l'extrémité du convoyeur de sortie.
- Documentez votre plan dans votre carnet d’ingénierie.
- Renommez votre projet Unité 4 Leçon 2 Activité et enregistrez-le sur votre appareil avant de commencer à modifier le projet.
- Modifiez le projet dans VEXcode pour qu'il corresponde au plan convenu avec votre groupe.
- Placez un disque sur le point de départ du convoyeur d’entrée et exécutez le projet. Les convoyeurs déplacent-ils le disque jusqu'à l'extrémité du convoyeur de sortie sans tomber ? Arrêtez le projet lorsque les convoyeurs ont fini de bouger et notez vos observations dans votre carnet d’ingénierie.
- Si le disque tombe de l'extrémité du convoyeur de sortie, modifiez votre projet jusqu'à ce qu'un disque atteigne l'extrémité du convoyeur sans tomber. Documentez tous les changements dans votre carnet d’ingénierie.
Vérifiez votre compréhension
Avant de passer à la leçon suivante, assurez-vous de bien comprendre les concepts de cette leçon en répondant aux questions suivantes dans votre cahier d’ingénierie.
Vérifiez vos questions de compréhension > ( Google Doc / .docx / .pdf )
Sélectionnez Suivant > pour passer à la réflexion de l’unité intermédiaire.