
Zkoumání rychlosti - založené na blocích
![]() Sada nástrojů pro učitele
Sada nástrojů pro učitele
-
Osnova aktivity
Tato zkoumání nejprve seznámí studenty s nastavením rychlosti pro jízdu a poté je požádá, aby prozkoumali, jak rychlost robota ovlivňuje jeho hybnost. Klikněte zde (Google / .docx / .pdf) pro osnovu této aktivity. Pochopení hybnosti robota bude důležitým konceptem, který bude třeba aplikovat v bowlingové hře Strike Challenge. -
Co budou studenti programovat
Použití šablony projektu Speedbot (Drivetrain 2-motors, No Gyro) umožňuje studentům změnit nastavení rychlosti bloku [Drive for] jednoduše přidáním bloku [Set drive velocity] do zásobníku. V řízené části aktivity studenti pracují s blokem [Nastavení rychlosti pohonu] a na konci aktivity je studenti vyzývají, aby své dovednosti v programování rychlosti aplikovali na testy přenosu hybnosti a energie.
Speedbot je připraven k jízdě různými rychlostmi!
Toto vyšetřování vám pomůže dozvědět se více o programování Speedbota pro jízdu rychlostí, která je pro daný úkol nejvhodnější. V závěrečné Strike Challenge budete muset najít rychlost pro Speedbota, která mu umožní být rychlý a mít velkou hybnost, ale zároveň si zachovat kontrolu, aby odpálil míč pod dobrým úhlem a s velkou silou.
VEXcode V5, který bude použit v první části tohoto vyšetřování:

![]() Tipy pro učitele
Tipy pro učitele
Pokud student používá VEXcode V5 poprvé, může si tutoriály kdykoli během tohoto zkoumání přečíst. Výukové programy se nacházejí v panelu nástrojů.

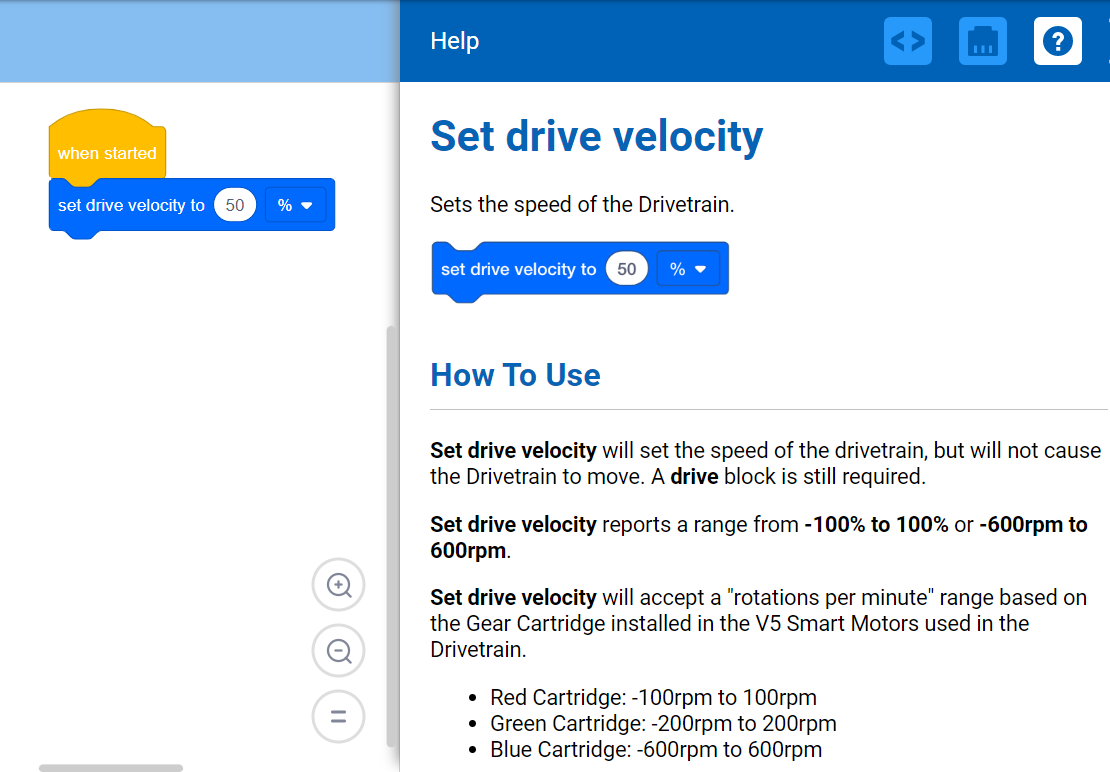
Chcete-li se o bloku dozvědět více informací, otevřeteNápovědua poté vyberte blok, o kterém si chcete přečíst.
Každá skupina studentů by měla získat potřebný hardware a technický notebook skupiny. Poté otevřete VEXcode V5.
| Množství | Potřebný materiál |
|---|---|
| 1 |
Speedbot Robot |
| 1 |
Nabitá baterie robota |
| 1 |
VEXkód V5 |
| 1 |
USB kabel (pokud používáte počítač) |
| 1 |
Technický poznámkový blok |
| 1 |
Míč (velikost a tvar fotbalového míče) |
| 1 |
3m x 3m volný prostor |
| 1 |
Měřicí tyč nebo pravítko |
| 1 |
Role pásky |
| 1 |
Tabulka dat |
![]() Tipy pro učitele
Tipy pro učitele
-
Namodelujte každý z kroků pro kontrolu, zda je Speedbot připraven, aby si studenti zvykli na to.
Krok 1: Příprava na průzkum
Příprava na průzkum
Než začnete s aktivitou, máte každou z těchto položek připravenou?
-
Jsou všechny motory zapojeny do správných portů?
-
Jsou inteligentní kabelyzcela zasunutydo všech motorů?
-
Je baterienabitá?
Krok 2: Zahájení nového projektu
Před zahájením projektu vyberte projekt Speedbot (Drivetrain 2-motors, No Gyro) - Template. Projekt šablony obsahuje konfiguraci motoru Speedbota. Pokud šablonu nepoužijete, váš robot nebude projekt spouštět správně.

- Otevřete nabídku Soubor.
- VyberteOtevřítPříklady.
- Vyberte a otevřete šablonu projektuSpeedbot (Drivetrain 2-motors, No Gyro).
- Přejmenujte svůj projektna Rychlost pohonu, protože budeme používat blok [Nastavit rychlost pohonu].
- Uložte svůj projekt.
-
Pro pomoc s uložením projektu si přečtěte Návody uvnitř VEXcode V5.

-
-
Zkontrolujte, zda se název projektuDrive Velocitynyní nachází v okně uprostřed panelu nástrojů.

![]() Tipy pro učitele
Tipy pro učitele
-
Ujistěte se, že studenti vybrali šablonu projektu Speedbot (pohon 2 motory, bez gyroskopu).
-
Můžete studentům upozornit, že na stráncePříkladyje k dispozici několik šablon, ze kterých si mohou vybrat. Při stavbě a používání jiných robotů budou mít možnost používat různé šablony.
![]() Sada nástrojů pro učitele
Sada nástrojů pro učitele

- Ukládání projektů
Upozorňujeme, že při prvním otevření VEXcode V5 bylo okno označeno jakoVEXcode Projekta nebylo uloženo (jak je uvedeno na panelu nástrojů). Projekt VEXcode je výchozí název projektu při prvním spuštění VEXcode V5. Jakmile je projekt přejmenovánRychlost pohonua uložen, zobrazení se aktualizuje na Uloženo. Pomocí tohoto okna v panelu nástrojů lze snadno zkontrolovat, zda studenti používají správný projekt a zda je uložen.
Jakmile je projekt počáteční uložen, VEXcode V5 automaticky uloží všechny následné změny, jak je indikováno zprávou vedle názvu projektu.
Sdělte studentům, že jsou nyní připraveni začít se svým prvním projektem. Vysvětlete studentům, že pomocí několika jednoduchých kroků budou schopni vytvořit a spustit projekt, který nastaví rychlost pohonu Speedbota. - Zastavte se a diskutujte
Toto je dobrý bod k zastavení a k tomu, aby si studenti individuálně nebo ve skupinách zopakovali kroky, které právě dokončili při zahájení nového projektu ve VEXcode V5. Požádejte studenty, aby se nad tím zamysleli individuálně, než se o to podělí ve své skupině nebo s celou třídou.
Krok 3: Pohyb vpřed o 450 mm různými rychlostmi
-
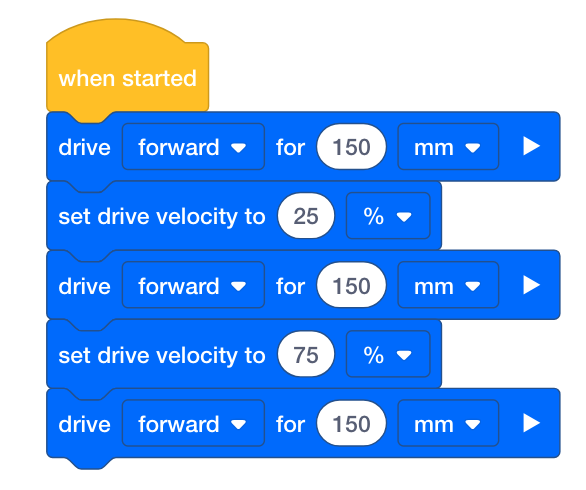
Sestavte tento projekt ve VEXcode V5.
![]() Sada nástrojů pro učitele
Sada nástrojů pro učitele
Všimněte si, že v této hromádce jsou druhý a třetí blok stejné jako čtvrtý a pátý blok. Po přidání třetího bloku může student kliknout pravým tlačítkem myši nebo dlouze kliknout na druhý blok a zvolit Duplikovat, čímž přidá čtvrtý a pátý blok. Pak lze rychlost čtvrtého bloku změnit na 75 %.

-
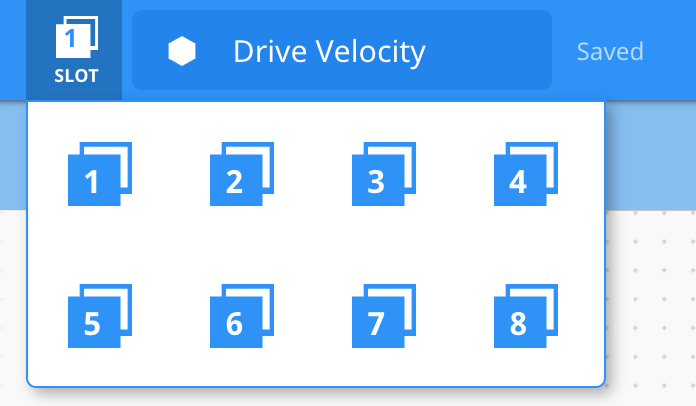
Vyberte na ikoně Slot. Svůj projekt si můžete stáhnout do jednoho z osmi dostupných slotů v Robot Brain. Vyberte slot 1.
-
Připojte robota k počítači nebo tabletu. Po úspěšném připojení se ikona Brain na panelu nástrojů změní na zelenou.

-
Poté klikněte na tlačítko Stáhnout na panelu nástrojů a stáhněte projekt Drive Velocity do mozku robota.

- Zkontrolujte, zda se váš projekt stáhl do mozku Speedbota, a to tak, že se podíváte na obrazovku Robotova mozku. Název projektu by měl být uveden na slotu 1.
-
Spusťte projekt na robotu Speedbot výběrem projektu a stisknutím tlačítka Spustit.

![]() Sada nástrojů pro učitele
Sada nástrojů pro učitele
-
Zastavte se a diskutujte
Požádejte studenty, aby předpověděli, co si myslí, že se stane, když si tento projekt stáhneme a spustíme ho na robotu Speedbot. Řekněte studentům, aby si své předpovědi zaznamenali do technických sešitů. Pokud to čas dovolí, požádejte každou skupinu, aby se podělila o svou předpověď.Studenti by měli předpovědět, že se Speedbot nejprve bude pohybovat vpřed svou výchozí rychlostí (50 %), poté pomaleji (25 %) než je výchozí rychlost, a nakonec rychleji (75 %) než je výchozí rychlost.
-
Možnost předvést první
Předveďte provedení projektu před třídou, než ho všichni studenti zkusí najednou. Shromážděte studenty na jednom místě a nechte dostatek prostoru pro pohyb Speedbota o 450 mm, pokud je umístěn na podlaze.Řekněte studentům, že nyní je řada na nich, aby spustili svůj projekt. Ujistěte se, že mají volnou cestu a že do sebe žádní roboti nenarazí.
Krok 4: Jízda vpřed a vzad různými rychlostmi

- Změňte druhý pohon bloku na jízdu vzad místo vpřed.
- Pakstáhněteprojekt.
- Spusťte projekt na robotu Speedbot.
![]() Sada nástrojů
kroku 4
Sada nástrojů
kroku 4
-
Projekt není třeba znovu ukládat, protože VEXcode V5 se uloží automaticky.
-
Chcete-li změnit blok [Jet pro] zvpřednavzad, jednoduše klikněte na rozbalovací nabídku a vybertevzad.
-
Pokud studenti používají počítač, požádejte je, aby odpojili USB kabel od robotického mozku. Pokud je robot během spouštění projektu připojen k počítači, může to způsobit, že bude tahat za připojovací kabel.
-
Protože nevybíráme nový slot, nový projekt se stáhne do slotu 1 a nahradí předchozí projekt.
![]() Tipy pro učitele
Tipy pro učitele
V případě potřeby požádejte týmy, aby se o testovací prostor a míč podělily, ale je možné zřídit i více testovacích prostor, každý s vlastním míčem. Rozhodněte se, zda chcete zřídit testovací oblast (prostory), nebo zda chcete, aby to udělali studenti.
Krok 5: Nastavení testovací oblasti

Příklad rozvržení testovací oblasti
- Použijte pásku a metr k vytvoření 3m čáry na podlaze, jako je vodorovná čára zobrazená na obrázku výše.
- Po vytvoření čáry použijte pásku a měřič ještě jednou nalepte, abyste vytvořili 1m čáry přes 3m čáru jako svislé čáry na obrázku výše. Přilepte 1m čáru na každých 50 cm značky na svislé čáře počínaje 0cm.
- Kratší vodorovné čáry by měly být vystředěny na delší svislou čáru.
- Během nastavování oblasti by měl jeden nebo dva členové vašeho týmu vytvořit nový projekt s názvem Momentum. Nastavte rychlost na 50% a nechte Speedbot jet dopředu na první řádek na 50 cm. Mějte na paměti, že 1 cm = 10 mm, takže robot bude cestovat dopředu o 50 cm nebo 500 milimetrů.

![]() Sada nástrojů
učitele
Proč tato aktivita?
Sada nástrojů
učitele
Proč tato aktivita?
Sběr a analýza dat, dokonce i jednoduché rozpoznávání vzorů, jsou základní vědecké dovednosti. Tato aktivita dodává analýze dat strukturu tím, že zabraňuje běžným chybným krokům. Všimněte si, že instrukce studentům neříkají, aby měnili dojezdovou vzdálenost robota spolu se změnou rychlosti robota. Toto je záměrné uplatnění toho, co vědci zabývající se učením nazývají strategií kontroly proměnných. Naučit začínající badatele manipulovat s jednou proměnnou (tj. v tomto případě rychlostí) za účelem určení jejího vlivu na druhou proměnnou (tj. vzdálenost, kterou míč urazí po srážce), je důležité, protože to nemusí být nutně přístup, který studenti osvojí spontánně, a ne spíše přístup „hádej a ověřuj“. Typické metody typu „hádej a ověřuj“ často manipulují s více než jednou proměnnou najednou (tj. mění jak rychlost, tak vzdálenost, kterou robot urazí) a pozorují vliv soutoku na vzdálenost, kterou míč urazí po rotaci. Tato aktivita se snaží studenty od toho odvést, protože vztahy mezi proměnnými jsou pak nejednoznačné. Je to vyšší rychlost robota, větší vzdálenost, kterou robot urazí, nebo obojí, co vede míč k většímu letu? Na to nedokážeme odpovědět, když manipulujeme s oběma proměnnými současně.
Týmy se však mohou spontánně pokusit řídit robota na různé vzdálenosti. Pokud si toho všimnete, požádejte je, aby změnili pouze vzdálenost, ale rychlost zachovali stejnou, jako byla při pokusu s původní vzdáleností 500 mm. Tímto způsobem mohou porovnat stejnou rychlost s různými ujetými vzdálenostmi, aby zjistili, zda ujetá vzdálenost robota také ovlivňuje, jak daleko míč urazí.
Krok 6: Testování přenosu energie během srážek

![]() Tipy pro učitele
Tipy pro učitele
-
Připravte si prostor pro odrážení míče různými směry na různé vzdálenosti. V případě potřeby zavírejte dveře a/nebo okna.
-
Tabulku pro Zkoumání rychlosti lze uložit níže, nebo si ji studenti mohou znovu vytvořit ve svých technických sešitech.
-
Rubriku pro hodnocení týmových inženýrských sešitů naleznete zde (Google / .docx / .pdf) a rubriku pro hodnocení individuálních sešitů naleznete zde (Google / .docx / .pdf). Kdykoli plánujete hodnotit práci studentů pomocí rubriky (rubrik), nezapomeňte jim rubriku sdílet ještě předtím, než začnou na projektu pracovat.
Vycentrujte míč na vodorovnou čáru ve výšce 50 cm a umístěte robota tak, aby jeho přední část byla vycentrována na vodorovnou čáru ve výšce 0 cm. Ujistěte se, že přední část robota směřuje ke směru koule. Spusťte svůj první projekt Hybnost s rychlostí nastavenou na 50 % a věnujte pozornost srážce robota s míčem.
Zaznamenejte nastavenou rychlost, ujetou vzdálenost a vzdálenost, kterou míč urazil, do této datové tabulky (Google / .pdf). První řádek tabulky byl pro vás spuštěn na základě projektu Momentum, na kterém jste pracovali v předchozím kroku. Při pokusu o nastavení různých rychlostí pokračujte v přidávání dat do této tabulky. Poté můžete přidávat data ostatních týmů, když diskutujete o svých zjištěních jako třída.

Při shromažďování dat se zamyslete a odpovězte na níže uvedené otázky ve svém technickém poznámkovém bloku:
- Jak poznáte, že hybnost robota přenášela energii na míč během kolize? Vysvětli podrobnosti.
- Test opakujte nejméně dvakrát. Zkuste rychlost nižší než 50%. Nastavte míč do jeho polohy a zaznamenejte do tabulky, jak daleko míč cestuje. Vyzkoušejte také rychlost vyšší než 50%. Nastavte míč do jeho polohy a zaznamenejte do tabulky, jak daleko míč cestuje.
- Když všechny skupiny dokončí své tři testy, diskutujte o rychlostech, které si ostatní skupiny zvolily, a o tom, jak daleko míč ve svých testech cestoval. Když týmy sdílejí svá data, přidejte jejich zjištění do tabulky.
- V datech hledejte vzory. Zvětšuje se nebo zmenšuje vzdálenost ujetá míčem se zvyšující se nastavenou rychlostí?
![]() Sada nástrojů pro učitele
-
odpovědí
Sada nástrojů pro učitele
-
odpovědí
-
Pohyb míče je důkazem toho, že robot během srážky přenesl energii. Studenti mohou také jako důkaz popsat rychlost míče po nárazu nebo směr jeho pohybu.
-
Vzdálenost, kterou míč urazí, závisí na hmotnosti/váze použitého míče a rychlosti nastavené pro robota.
-
Studenti by si měli uvědomit, že vyšší rychlosti vedou k větší vzdálenosti míče než nižší rychlosti. Explicitně to spojte s hybností robota. Zdůrazněte, že hmotnost robota se nezměnila, pouze jeho rychlost, ale že obojí přispívá k hybnosti robota. Zeptejte se jich, jestli si myslí, že by míč doletěl stejně daleko, kdyby byl robot těžší. Pravděpodobně ano. Více o vlivu hmotnosti míče během srážky se dočtete v dalším čtení.
-
Studentské skupiny si mohly zvolit velmi proměnlivé rychlosti, ale celkovým cílem učení je, aby si studenti uvědomili, že vyšší rychlosti vedou k větší hybnosti, která přenáší na míč více energie během srážek.