
![]() Lehrer-Toolbox
Lehrer-Toolbox
-
Aktivitätsübersicht
Bei dieser Untersuchung lernen die Schüler zunächst, die Geschwindigkeit für das Fahren einzustellen. Anschließend sollen sie untersuchen, wie sich die Geschwindigkeit des Roboters auf seinen Impuls auswirkt. Klicken Sie hier (Google / .docx / .pdf), um eine Übersicht dieser Aktivität anzuzeigen. Das Verständnis der Dynamik des Roboters ist ein wichtiges Konzept für die Anwendung beim Bowlingspiel Strike Challenge. -
Was die Schüler programmieren werden
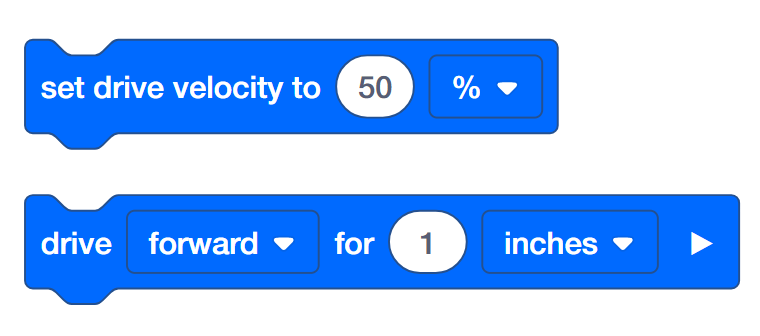
Mithilfe des Speedbot-Vorlagenprojekts (Antriebsstrang mit 2 Motoren, kein Gyro) können die Schüler die Geschwindigkeitseinstellungen des Blocks [Antrieb für] ändern, indem sie einfach einen Block [Antriebsgeschwindigkeit einstellen] zu einem Stapel hinzufügen. Im angeleiteten Teil der Aktivität arbeiten die Schüler mit dem Block [Antriebsgeschwindigkeit festlegen] und am Ende der Aktivität werden sie aufgefordert, ihre Fähigkeiten zur Geschwindigkeitsprogrammierung auf Tests von Impuls und Energieübertragung anzuwenden.
Speedbot ist bereit, mit unterschiedlichen Geschwindigkeiten zu fahren!
Diese Untersuchung wird Ihnen dabei helfen, mehr über die Programmierung des Speedbot zu erfahren, damit er mit der für die Aufgabe am besten geeigneten Geschwindigkeit fährt. In der Strike-Challenge am Ende müssen Sie für den Speedbot eine Geschwindigkeit finden, die es ihm ermöglicht, schnell zu sein und viel Schwung zu haben, aber dennoch die Kontrolle zu behalten, um den Ball in einem guten Winkel und mit großer Kraft zu treffen.
VEXcode V5, der im ersten Teil dieser Untersuchung verwendet wird:
![]() Tipps für Lehrer
Tipps für Lehrer
Wenn die Studierenden VEXcode V5 zum ersten Mal verwenden, können sie während der Erkundung jederzeit auf die Tutorials zurückgreifen. Die Tutorials befinden sich in der Symbolleiste.

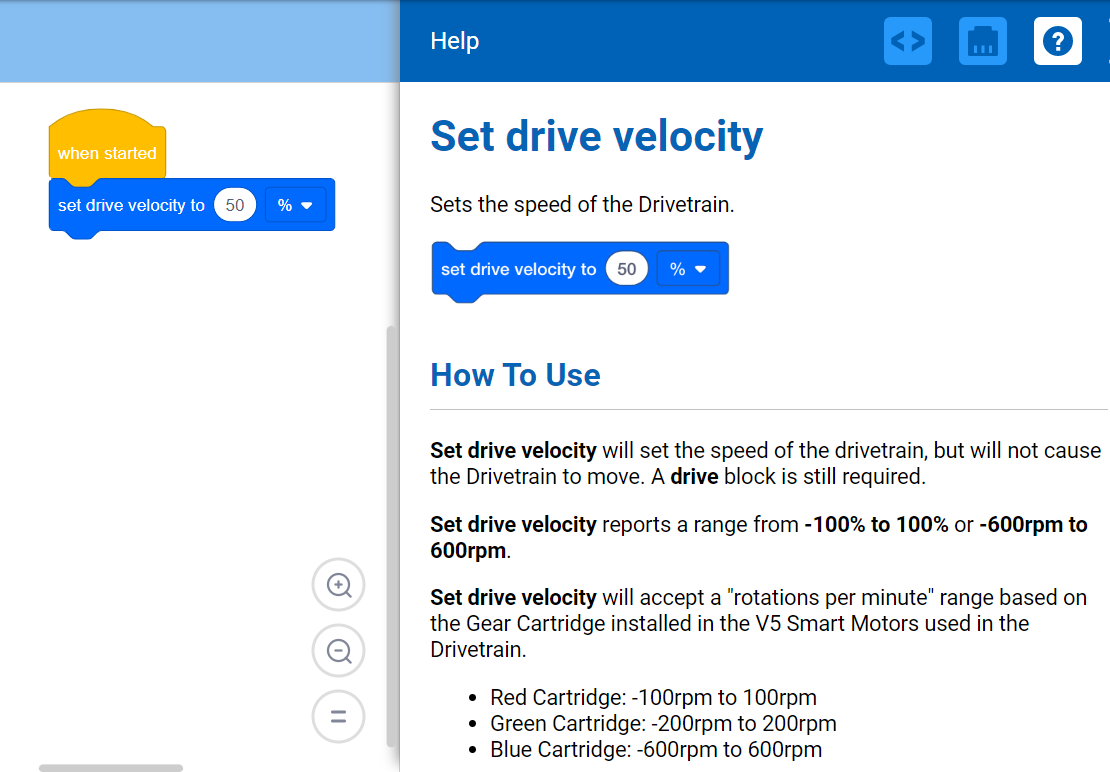
Um weitere Informationen über den Block zu erhalten, öffnen Sie die Hilfe und wählen Sie dann den Block aus, über den Sie lesen möchten.
Jede Studentengruppe sollte die erforderliche Hardware und das technische Notizbuch der Gruppe erhalten. Öffnen Sie dann VEXcode V5.
| Menge | Benötigte Materialien |
|---|---|
| 1 |
Speedbot-Roboter |
| 1 |
Geladener Roboterakku |
| 1 |
VEXcode V5 |
| 1 |
USB-Kabel (bei Verwendung eines Computers) |
| 1 |
Technisches Notizbuch |
| 1 |
Ball (Größe und Form eines Fußballs) |
| 1 |
3 x 3 m Freiraum |
| 1 |
Meterstab oder Lineal |
| 1 |
Rolle Klebeband |
| 1 |
Datentabelle |
![]() Tipps für Lehrer
Tipps für Lehrer
-
Modellieren Sie jeden Schritt zum Überprüfen, ob der Speedbot bereit ist, damit sich die Schüler daran gewöhnen.
Schritt 1: Vorbereitung auf die Erkundung
Vorbereitung auf die Erkundung
Haben Sie alle diese Gegenstände bereit, bevor Sie mit der Aktivität beginnen?
-
Sind alle Motoren an die richtigen Anschlüsse angeschlossen?
-
Sind die Smart Cables bei allen Motoren vollständig eingesteckt?
-
Ist das Gehirn eingeschaltet?
-
Ist der Akku geladen?
Schritt 2: Neues Projekt starten
Bevor Sie mit Ihrem Projekt beginnen, wählen Sie das Speedbot-Vorlagenprojekt (Antriebsstrang mit 2 Motoren, kein Gyro) aus. Das Vorlageprojekt enthält die Motorkonfiguration des Speedbots. Wenn die Vorlage nicht verwendet wird, führt Ihr Roboter das Projekt nicht korrekt aus.

-
Öffnen Sie das Menü Datei.
-
Auswählen Öffnen Beispiele.
-
Wählen und öffnen Sie das Vorlagenprojekt Speedbot (Antriebsstrang 2 Motoren, kein Gyro).
-
Benennen Sie Ihr Projekt Antriebsgeschwindigkeit um, da wir den Block [Antriebsgeschwindigkeit festlegen] verwenden werden.
-
Speichern Sie Ihr Projekt.
-
Hilfe zum Speichern eines Projekts finden Sie in den Tutorials in VEXcode V5.

-
-
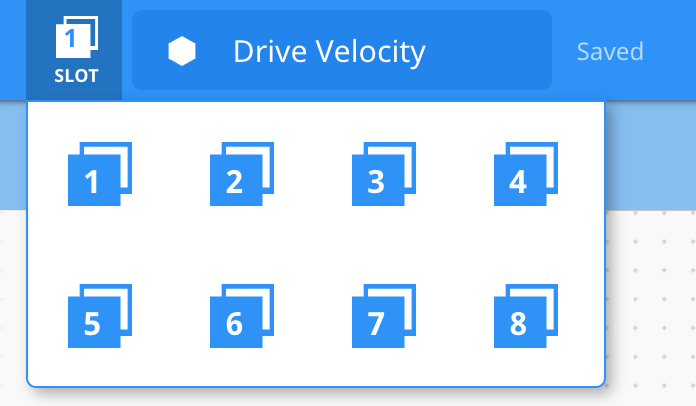
Überprüfen Sie, ob der Projektname Drive Velocity jetzt im Fenster in der Mitte der Symbolleiste angezeigt wird.

![]() Tipps für Lehrer
Tipps für Lehrer
-
Stellen Sie sicher, dass die Schüler das Vorlagenprojekt „Speedbot (Antriebsstrang mit 2 Motoren, kein Gyro)“ ausgewählt haben.
-
Sie können die Studierenden darauf hinweisen, dass auf der Seite Beispiele mehrere Vorlagen zur Auswahl stehen. Wenn sie andere Roboter bauen und verwenden, haben sie die Möglichkeit, unterschiedliche Vorlagen zu verwenden.
![]() Lehrer-Toolbox
Lehrer-Toolbox

-
Speichern von Projekten
Weisen Sie darauf hin, dass beim ersten Öffnen von VEXcode V5 das Fenster die Bezeichnung VEXcode-Projekt trug und nicht gespeichert wurde (in der Symbolleiste angezeigt). „VEXcode-Projekt“ ist der Standardprojektname beim ersten Öffnen von VEXcode V5. Sobald das Projekt in Drive Velocity umbenannt und gespeichert wurde, wird die Anzeige auf „Gespeichert“ aktualisiert. Anhand dieses Fensters in der Symbolleiste kann leicht überprüft werden, ob die Schüler das richtige Projekt verwenden und es gespeichert ist.Sobald ein Projekt erstmals gespeichert wurde, speichert VEXcode V5 alle nachfolgenden Änderungen automatisch, wie durch die Meldung neben dem Projektnamen angezeigt.
Sagen Sie den Schülern, dass sie nun bereit sind, mit ihrem ersten Projekt zu beginnen. Erklären Sie den Schülern, dass sie mit wenigen einfachen Schritten ein Projekt erstellen und ausführen können, mit dem die Geschwindigkeit des Antriebsstrangs des Speedbots festgelegt wird.
-
Stoppen und diskutieren
Dies ist ein guter Punkt, um innezuhalten und die Schüler die gerade abgeschlossenen Schritte zum Starten eines neuen Projekts in VEXcode V5 einzeln oder in Gruppen wiederholen zu lassen. Bitten Sie die Schüler, einzeln nachzudenken, bevor sie ihre Erkenntnisse in ihrer Gruppe oder der gesamten Klasse teilen.
Schritt 3: 450 mm vorwärts fahren bei unterschiedlichen Geschwindigkeiten
-
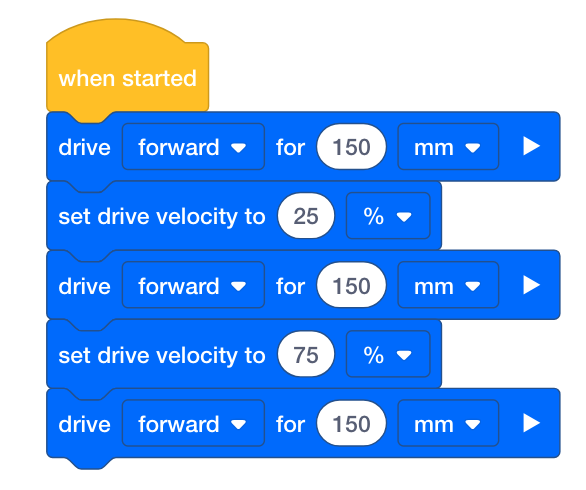
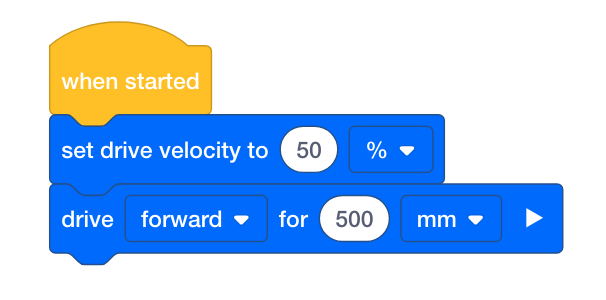
Erstellen Sie dieses Projekt in VEXcode V5.
![]() Lehrer-Toolbox
Lehrer-Toolbox
Beachten Sie, dass in diesem Stapel der zweite und dritte Block mit dem vierten und fünften Block identisch sind. Nach dem Hinzufügen des dritten Blocks kann der Schüler mit der rechten Maustaste oder lange auf den zweiten Block klicken und „Duplizieren“ wählen, um den vierten und fünften Block hinzuzufügen. Anschließend kann die Geschwindigkeit des vierten Blocks auf 75 % geändert werden.

-
Wählen Sie das Slot-Symbol aus. Sie können Ihr Projekt in einen der acht verfügbaren Slots im Robot Brain herunterladen. Wählen Sie Steckplatz 1 aus.
-
Verbinden Sie den Roboter mit Ihrem Computer oder Tablet. Das Brain-Symbol in der Symbolleiste wird grün, sobald eine erfolgreiche Verbindung hergestellt wurde.

-
Klicken Sie dann auf die Schaltfläche „Herunterladen“ in der Symbolleiste, um das Projekt Drive Velocity auf Robot Brain herunterzuladen.
-
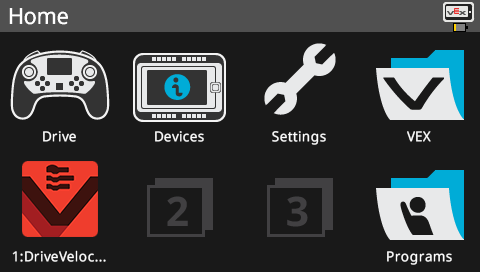
Überprüfen Sie anhand des Bildschirms des Robotergehirns, ob Ihr Projekt in das Speedbot-Gehirn heruntergeladen wurde. Der Projektname sollte in Slot 1 aufgeführt werden.
-
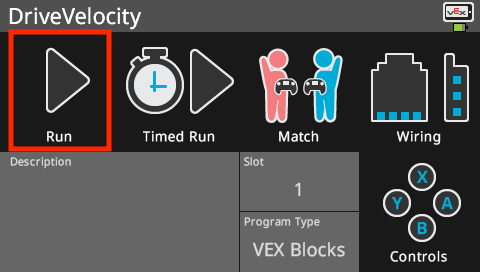
Führen Sie das Projekt auf dem Speedbot-Roboter aus, indem Sie das Projekt auswählen und dann auf „Ausführen“ klicken.
![]() Lehrer-Toolbox
Lehrer-Toolbox
-
Anhalten und diskutieren
Bitten Sie die Schüler, vorherzusagen, was ihrer Meinung nach passieren wird, wenn dieses Projekt heruntergeladen und auf dem Speedbot-Roboter ausgeführt wird. Bitten Sie die Schüler, ihre Vorhersagen in ihren technischen Notizbüchern festzuhalten. Wenn es die Zeit erlaubt, bitten Sie jede Gruppe, ihre Vorhersage mitzuteilen.Die Schüler sollten vorhersagen, dass sich der Speedbot zuerst mit seiner Standardgeschwindigkeit (50 %) vorwärts bewegt, dann langsamer (25 %) als die Standardgeschwindigkeit und dann schneller (75 %) als die Standardgeschwindigkeit.
-
Option, zuerst ein Modell zu erstellen
Führen Sie das Projekt vor der Klasse vor, bevor Sie es von allen Schülern gleichzeitig ausprobieren lassen. Versammeln Sie die Schüler in einem Bereich und lassen Sie genügend Platz, damit sich der Speedbot 450 mm bewegen kann, wenn er auf dem Boden steht.Sagen Sie den Schülern, dass sie nun an der Reihe sind, ihr Projekt durchzuführen. Stellen Sie sicher, dass die Wege frei sind und dass sich die Roboter nicht gegenseitig begegnen.
Schritt 4: Vorwärts- und Rückwärtsfahren mit unterschiedlicher Geschwindigkeit

-
Ändern Sie den zweiten Antrieb für Block, um rückwärts statt vorwärts zu fahren.
-
Dann laden Sie das Projekt herunter.
-
Führen Sie das Projekt auf dem Speedbot-Roboter aus.
![]() Lehrer-Toolbox
-
Abschließen von Schritt 4
Lehrer-Toolbox
-
Abschließen von Schritt 4
-
Es ist nicht erforderlich, das Projekt erneut zu speichern, da VEXcode V5 die Speicherung automatisch durchführt.
-
Um den Block [Fahren für] von vorwärts auf rückwärtszu ändern, klicken Sie einfach auf das Dropdown-Menü und wählen Sie rückwärtsaus.
-
Wenn die Schüler einen Computer verwenden, bitten Sie sie, das USB-Kabel vom Robot Brain zu trennen. Wenn der Roboter während der Ausführung eines Projekts an einen Computer angeschlossen ist, kann es passieren, dass er am Verbindungskabel zieht.
-
Da wir keinen neuen Steckplatz auswählen, wird das neue Projekt in Steckplatz 1 heruntergeladen und ersetzt das vorherige Projekt.
![]() Tipps für Lehrer
Tipps für Lehrer
Bitten Sie die Teams, sich bei Bedarf den Testbereich und den Ball zu teilen. Es können jedoch auch mehrere Testbereiche mit jeweils eigenem Ball eingerichtet werden. Entscheiden Sie, ob Sie die Prüfungsbereiche selbst einrichten möchten oder ob dies den Studierenden überlassen werden soll.
Schritt 5: Einrichten Ihres Testbereichs

Beispiel für die Anordnung eines Testbereichs
-
Zeichnen Sie mit Klebeband und einem Meterstab eine 3 m lange Linie auf dem Boden, ähnlich der horizontalen Linie im Bild oben.
-
Nachdem die Linie erstellt wurde, verwenden Sie noch einmal Klebeband und Ihren Meterstab, um 1-m-Linien über die 3-m-Linie zu ziehen, wie die vertikalen Linien im Bild oben. Kleben Sie bei jeder 50-cm-Markierung eine 1-m-Linie auf die vertikale Linie, beginnend bei 0 cm.
-
Die kürzeren horizontalen Linien sollten auf der längeren vertikalen Linie zentriert sein.
-
-
Während der Bereich eingerichtet wird, sollten ein oder zwei Mitglieder Ihres Teams ein neues Projekt mit dem Namen Momentumerstellen. Stellen Sie die Geschwindigkeit auf 50 % ein und lassen Sie den Speedbot im Abstand von 50 cm bis zur ersten Linie vorwärtsfahren. Bedenken Sie, dass 1 cm = 10 mm ist, der Roboter also 50 cm oder 500 Millimeter vorwärts fährt.
![]() Lehrer-Toolbox
–
Warum diese Aktivität?
Lehrer-Toolbox
–
Warum diese Aktivität?
Das Sammeln und Analysieren von Daten sowie selbst die Erkennung einfacher Muster sind grundlegende wissenschaftliche Fähigkeiten. Diese Aktivität verleiht der Datenanalyse Struktur, indem sie häufige Fehltritte verhindert. Beachten Sie, dass die Schüler in den Anweisungen nicht aufgefordert werden, neben der Geschwindigkeit des Roboters auch die Fahrstrecke des Roboters zu variieren. Dies ist eine gezielte Anwendung dessen, was Lernwissenschaftler als „Strategie der Variablenkontrolle“ bezeichnen. Es ist wichtig, unerfahrenen Forschern beizubringen, jeweils eine Variable (in diesem Fall die Geschwindigkeit) zu manipulieren, um ihren Einfluss auf eine zweite Variable (die Distanz, die der Ball nach dem Zusammenstoß zurücklegt) zu bestimmen, da dies nicht unbedingt eine Vorgehensweise ist, die die Schüler spontan einer Rate-und-Überprüfung-Methode vorziehen. Bei typischen Rate-und-Prüf-Ansätzen wird häufig mehr als eine Variable gleichzeitig manipuliert (d. h. sowohl die Geschwindigkeit als auch die vom Roboter zurückgelegte Distanz werden geändert) und die Auswirkung der Konfluenz auf die Distanz, die der Ball nach der Drehung zurücklegt, beobachtet. Mit dieser Aktivität möchten wir die Schüler davon abbringen, da die Beziehungen zwischen den Variablen in diesem Fall nicht eindeutig sind. Ist es die höhere Geschwindigkeit des Roboters, die größere Distanz, die der Roboter fährt, oder beides, das dazu führt, dass der Ball weitere Strecken zurücklegt? Das können wir nicht beantworten, wenn wir beide Variablen gleichzeitig manipulieren.
Allerdings können die Teams auch spontan versuchen, mit dem Roboter unterschiedliche Distanzen zurückzulegen. Wenn Sie dies beobachten, bitten Sie Ihren Trainer, nur die Distanz zu ändern, die Geschwindigkeit jedoch beizubehalten, die bei einem Versuch mit der ursprünglichen Distanz von 500 mm vorlag. Auf diese Weise können sie die gleiche Geschwindigkeit mit unterschiedlichen Schlagdistanzen vergleichen, um zu sehen, ob die Schlagdistanz des Roboters auch einen Einfluss darauf hat, wie weit der Ball fliegt.
Schritt 6: Testen der Energieübertragung bei Kollisionen


![]() Tipps für Lehrer
Tipps für Lehrer
-
Bereiten Sie den Bereich so vor, dass der Ball in verschiedene Richtungen und über verschiedene Entfernungen abprallen kann. Schließen Sie bei Bedarf Türen und/oder Fenster.
-
Die Tabelle zum Erkunden der Geschwindigkeit kann unten gespeichert werden, oder die Schüler können die Tabelle in ihren technischen Notizbüchern neu erstellen.
-
Eine Rubrik zur Bewertung von Notizbüchern für die Entwicklung von Teams finden Sie hier (Google / .docx / .pdf), und eine Rubrik zur Bewertung einzelner Notizbücher finden Sie hier (Google / .docx / .pdf). Wenn Sie vorhaben, die Arbeit eines Schülers anhand einer oder mehrerer Rubriken zu bewerten, teilen Sie ihnen die Rubrik unbedingt mit, bevor sie mit der Arbeit am Projekt beginnen.
Zentrieren Sie den Ball auf der horizontalen Linie bei 50 cm und platzieren Sie Ihren Roboter so, dass seine Vorderseite auf der horizontalen Linie bei 0 cm zentriert ist. Stellen Sie sicher, dass die Vorderseite des Roboters in Richtung des Balls zeigt. Führen Sie Ihr erstes Momentum-Projekt mit einer Geschwindigkeit von 50 % aus und achten Sie genau darauf, wenn der Roboter mit dem Ball kollidiert.
Notieren Sie die eingestellte Geschwindigkeit, die gefahrene Distanz und die Entfernung, die der Ball zurückgelegt hat, in dieser Datentabelle (Google / .pdf). Die erste Zeile der Tabelle wurde basierend auf dem Momentum-Projekt, an dem Sie im vorherigen Schritt gearbeitet haben, für Sie erstellt. Fügen Sie dieser Tabelle weiterhin Daten hinzu, während Sie versuchen, unterschiedliche Geschwindigkeiten einzustellen. Sie können dann die Daten anderer Teams hinzufügen, während Sie Ihre Ergebnisse in der Klasse besprechen.

Denken Sie beim Sammeln Ihrer Daten über die folgenden Fragen in Ihrem technischen Notizbuch nach und beantworten Sie sie:
-
Woran erkennt man, dass durch den Impuls des Roboters beim Zusammenstoß Energie auf den Ball übertragen wurde? Erklären Sie es ausführlich.
-
Wiederholen Sie den Test mindestens noch zweimal. Versuchen Sie es mit einer Geschwindigkeit von weniger als 50 %. Bringen Sie den Ball wieder an seine Position und notieren Sie in der Tabelle, wie weit der Ball fliegt. Versuchen Sie auch eine Geschwindigkeit von über 50 %. Bringen Sie den Ball wieder an seine Position und notieren Sie in der Tabelle, wie weit der Ball fliegt.
-
Wenn alle Gruppen ihre drei Tests abgeschlossen haben, besprechen Sie die von den anderen Gruppen gewählten Geschwindigkeiten und wie weit der Ball bei ihren Tests geflogen ist. Wenn die Teams ihre Daten teilen, fügen Sie ihre Ergebnisse Ihrer Tabelle hinzu.
-
Suchen Sie in den Daten nach Mustern. Vergrößert oder verringert sich die vom Ball zurückgelegte Distanz, wenn die eingestellte Geschwindigkeit zunimmt?
![]() Lehrer-Toolbox
-
Antworten
Lehrer-Toolbox
-
Antworten
-
Die Bewegung des Balles ist ein Beweis dafür, dass der Roboter beim Zusammenstoß Energie übertragen hat. Als Beweis könnten die Schüler auch die Geschwindigkeit des Balls nach dem Aufprall oder seine Flugrichtung beschreiben.
-
Die vom Ball zurückgelegte Distanz hängt von der Masse/dem Gewicht des verwendeten Balls und der eingestellten Geschwindigkeit des Roboters ab.
-
Die Schüler sollten erkennen, dass der Ball bei höherer Geschwindigkeit weiter fliegt als bei niedrigerer Geschwindigkeit. Verknüpfen Sie dies explizit mit der Dynamik des Roboters. Heben Sie hervor, dass sich das Gewicht des Roboters nicht geändert hat, sondern nur seine Geschwindigkeit, dass aber beides zur Dynamik des Roboters beiträgt. Fragen Sie sie, ob der Ball ihrer Meinung nach genauso weit fliegen würde, wenn der Roboter schwerer wäre. Das wäre vermutlich der Fall. Mehr zu den Auswirkungen der Ballmasse beim Zusammenstoß erfahren Sie im nächsten Teil.
-
Die Schülergruppen haben möglicherweise sehr unterschiedliche Geschwindigkeiten gewählt, das allgemeine Lernziel besteht jedoch darin, dass die Schüler erkennen, dass höhere Geschwindigkeiten zu einem größeren Impuls führen, der bei Kollisionen mehr Energie auf den Ball überträgt.