
![]() Skolotāja rīklodziņš
Skolotāja rīklodziņš
-
Aktivitātes izklāsts
Šajā izpētē skolēni vispirms tiks iepazīstināti ar braukšanas ātruma iestatīšanu un pēc tam lūgs viņiem izpētīt, kā robota ātrums ietekmē tā impulsu. Noklikšķiniet šeit (Google / .docx / .pdf), lai skatītu šīs aktivitātes izklāstu. Izpratne par robota impulsu būs svarīgs jēdziens, kas jāpiemēro Strike Challenge boulinga spēlē. -
Ko skolēni ieprogrammēs
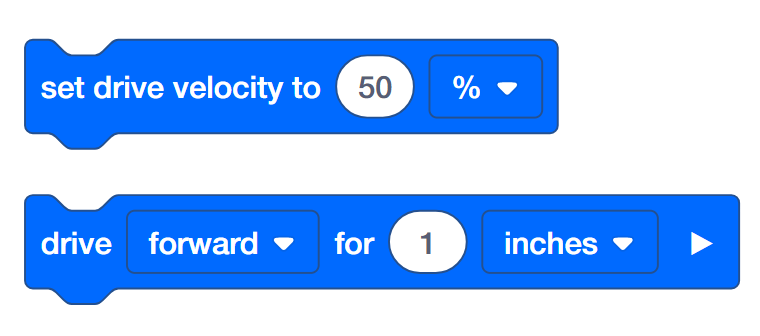
Izmantojot Speedbot (2-motori, bez žiroskopa) veidņu projektu, skolēni var mainīt bloka [Drive for] ātruma iestatījumus, vienkārši pievienojot blokam [Iestatīt piedziņas ātrumu]. kaudze. Nodarbības vadītajā daļā studenti strādā ar bloku [Iestatīt piedziņas ātrumu], un aktivitātes beigās viņiem tiek lūgts pielietot savas ātruma programmēšanas prasmes impulsa un enerģijas pārneses testos.
Speedbot ir gatavs braukt ar dažādiem ātrumiem!
Šī izmeklēšana palīdzēs jums uzzināt vairāk par Speedbot programmēšanu, lai tā brauktu ar ātrumu, kas ir vispiemērotākais uzdevumam. Strike Challenge beigās jums būs jāatrod ātrums Speedbot, kas ļauj tam būt ātram un ar lielu impulsu, bet saglabāt kontroli, lai trāpītu bumbu labā leņķī un ar lielu spēku.
VEXcode V5, kas tiks izmantots šīs izmeklēšanas pirmajā daļā:
 .
.
![]() Skolotāju padomi
Skolotāju padomi
Ja šī ir pirmā reize, kad students izmanto VEXcode V5, viņš jebkurā laikā šīs izpētes laikā var atsaukties uz apmācībām. Pamācības atrodas rīkjoslā.

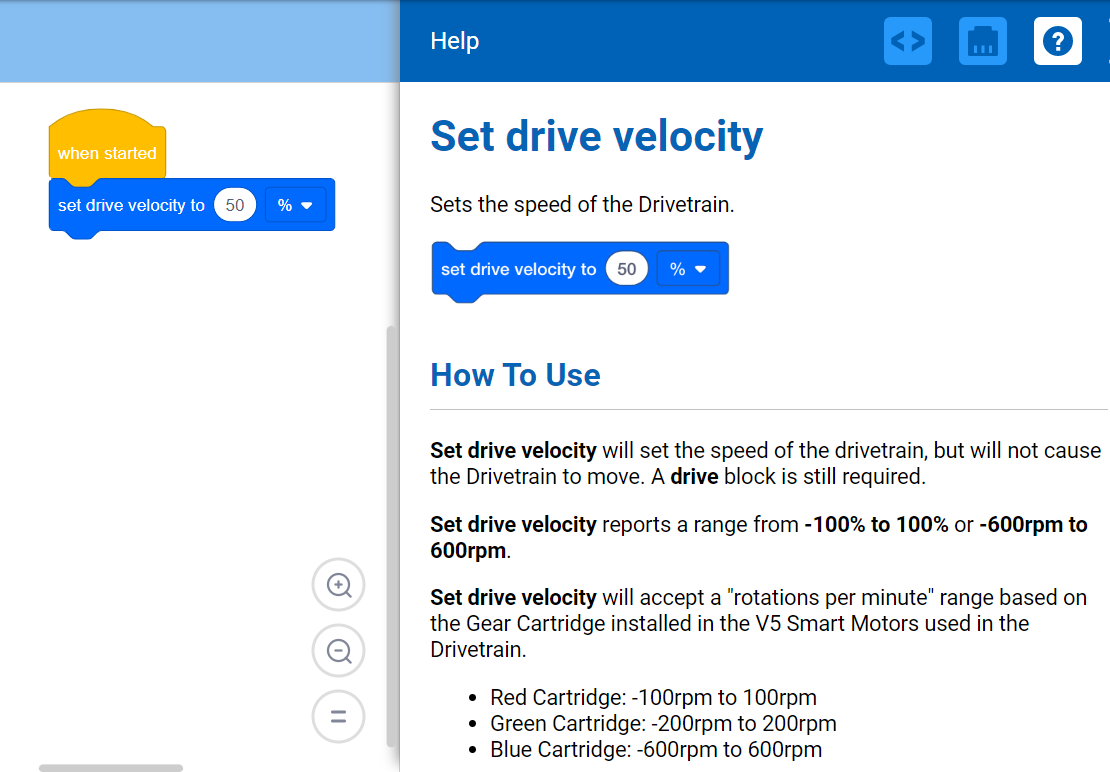
Lai uzzinātu vairāk informācijas par bloku, atveriet Palīdzība un pēc tam atlasiet bloku, par kuru vēlaties lasīt.
Katrai studentu grupai jāiegūst nepieciešamā aparatūra un grupas inženiertehniskā piezīmju grāmatiņa. Pēc tam atveriet VEXcode V5.
| Daudzums | Nepieciešamie materiāli |
|---|---|
| 1 |
Speedbot robots |
| 1 |
Uzlādēts robota akumulators |
| 1 |
VEXcode V5 |
| 1 |
USB kabelis (ja izmantojat datoru) |
| 1 |
Inženierzinātņu piezīmju grāmatiņa |
| 1 |
Bumba (futbola bumbas izmērs un forma) |
| 1 |
3m x 3m brīvā telpa |
| 1 |
Skaitītāja nūja vai lineāls |
| 1 |
Lentes rullis |
| 1 |
Datu tabula |
![]() Skolotāju padomi
Skolotāju padomi
-
Modelējiet katru no darbībām, lai pārbaudītu, vai Speedbot ir gatavs, lai skolēni ieradīsies to darīt.
1. darbība: Sagatavošanās izpētei
Gatavošanās Izpētei
Vai pirms aktivitātes sākšanas jums ir gatavs katrs no šiem priekšmetiem?
-
Vai visi motori ir pievienoti pareizajiem portiem?
-
Vai viedie kabeļi ir pilnībā ievietoti visos motoros?
-
Vai Brain ir ieslēgts?
2. darbība: Sāciet jaunu projektu
Pirms sākat savu projektu, atlasiet Speedbot (2 piedziņas motori, bez žiroskopa) — veidnes projektu. Veidnes projektā ir iekļauta Speedbot motora konfigurācija. Ja veidne netiek izmantota, jūsu robots projektu nedarbos pareizi.

-
Atveriet izvēlni Fails.
-
Izvēlieties Atvērt Piemēri.
-
Atlasiet un atveriet veidnes projektu Speedbot (2 piedziņas motori, bez žiroskopa).
-
Pārdēvējiet savu projektu Drive Velocity , jo mēs izmantosim bloku [Iestatīt piedziņas ātrumu].
-
Saglabājiet savu projektu.
-
Lai saņemtu palīdzību saistībā ar projekta saglabāšanu, pārskatiet VEXcode V5 apmācības.

-
-
Pārbaudiet, vai projekta nosaukums Drive Velocity tagad ir logā rīkjoslas centrā.

![]() Skolotāju padomi
Skolotāju padomi
-
Pārliecinieties, vai skolēni ir izvēlējušies Speedbot (Drivetrain 2-motors, No Gyro) veidnes projektu.
-
Varat norādīt skolēniem, ka lapā piemēri ir vairākas veidnes, no kurām izvēlēties. Veidojot un izmantojot citus robotus, viņiem būs iespēja izmantot dažādas veidnes.
![]() Skolotāja rīklodziņš
Skolotāja rīklodziņš

-
Projektu saglabāšana
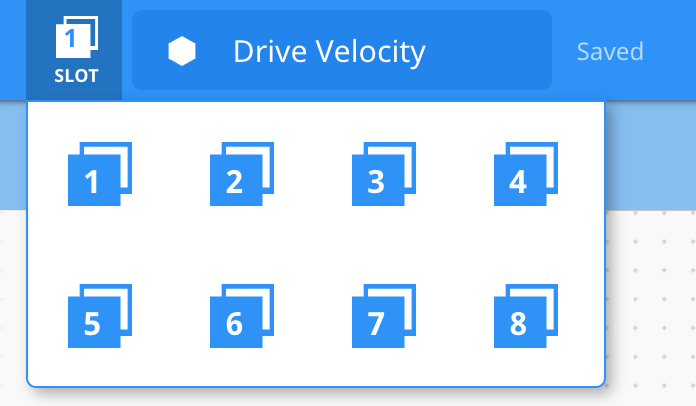
Norādiet, ka, pirmo reizi atverot VEXcode V5, logs tika apzīmēts ar VEXcode Project un tas netika saglabāts (norādīts rīkjoslā). VEXcode Project ir noklusējuma projekta nosaukums, kad VEXcode V5 pirmo reizi tiek atvērts. Kad projekts ir pārdēvēts par Drive Velocity un saglabāts, displejs tiek atjaunināts uz Saglabāts. Izmantojot šo logu rīkjoslā, ir viegli pārbaudīt, vai skolēni izmanto pareizo projektu un tas ir saglabāts.Kad projekts ir sākotnēji saglabāts, VEXcode V5 automātiski saglabā visas turpmākās izmaiņas, kā norādīts ziņojumā blakus projekta nosaukumam.
Pastāstiet studentiem, ka viņi tagad ir gatavi sākt savu pirmo projektu. Paskaidrojiet skolēniem, ka, veicot dažas vienkāršas darbības, viņi varēs izveidot un vadīt projektu, kas noteiks Speedbot piedziņas ātrumu.
-
Apstāties un apspriest
Tas ir labs punkts, lai apturētu un likt studentiem pārskatīt soļus, kas tikko tika pabeigti, uzsākot jaunu projektu VEXcode V5 individuāli vai grupās. Palūdziet studentiem pārdomāt individuāli, pirms dalās savā grupā vai visai klasei.
3. darbība: Brauciet uz priekšu 450 mm dažādos ātrumos
-
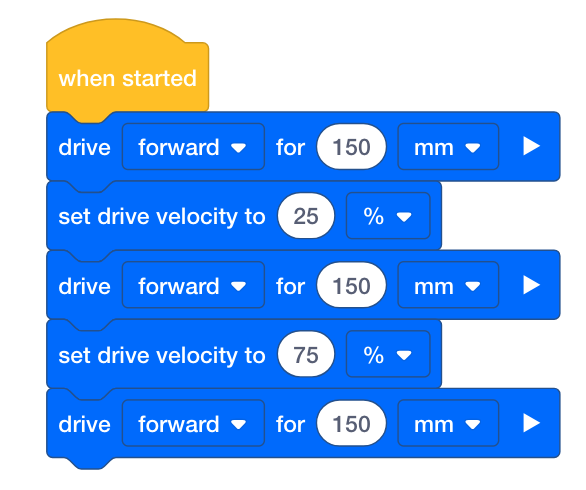
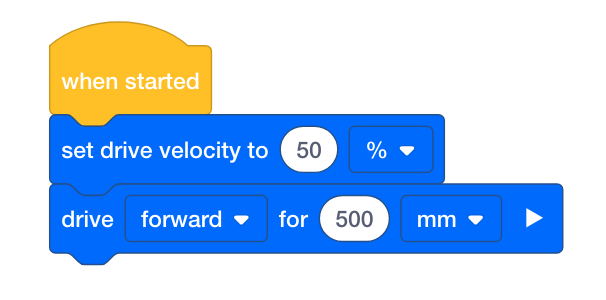
Veidojiet šo projektu VEXcode V5.
![]() Skolotāja rīklodziņš
Skolotāja rīklodziņš
Ņemiet vērā, ka šajā kaudzē otrais un trešais bloks ir tāds pats kā ceturtais un piektais bloks. Pēc trešā bloka pievienošanas skolēns var ar peles labo pogu vai ilgi noklikšķināt uz otrā bloka un izvēlēties Duplicate, lai pievienotu ceturto un piekto bloku. Tad ceturtā bloka ātrumu var mainīt uz 75%.

-
Atlasiet uz slota ikonas. Jūs varat lejupielādēt savu projektu vienā no astoņiem pieejamajiem robotu smadzeņu slotiem. Izvēlieties slotu 1.
-
Savienojiet robotu ar datoru vai planšetdatoru. Smadzeņu ikona rīkjoslā kļūst zaļa, tiklīdz ir izveidots veiksmīgs savienojums.

-
Pēc tam rīkjoslā noklikšķiniet uz pogas Lejupielādēt, lai robota smadzenēs lejupielādētu projektu Drive Velocity.
-
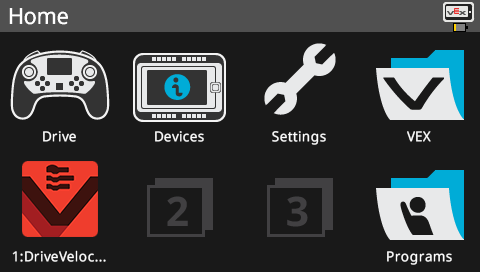
Pārbaudiet, vai jūsu projekts ir lejupielādēts programmā Speedbot's Brain, apskatot Robot Brain ekrānu. Projekta nosaukumam jābūt norādītam 1. vietā.
-
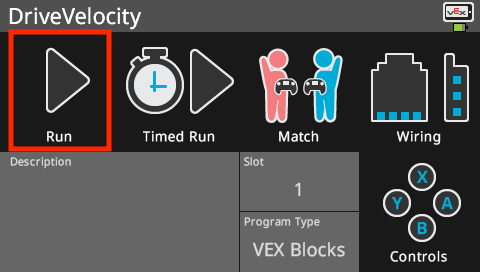
Palaidiet projektu Speedbot robotā, atlasot projektu un pēc tam nospiežot Palaist.
![]() Skolotāja rīklodziņš
Skolotāja rīklodziņš
-
Apstāties un apspriest
Palūdziet studentiem paredzēt, kas, viņuprāt, notiks, kad šis projekts tiks lejupielādēts un palaists ar Speedbot robotu. Pastāstiet studentiem ierakstīt savas prognozes savās inženierzinātņu piezīmju grāmatiņās. Ja laiks atļauj, palūdziet katrai grupai dalīties savās prognozēs.Studentiem jāparedz, ka Speedbot vispirms virzīsies uz priekšu ar noklusējuma ātrumu (50%), pēc tam lēnāk (25%) nekā noklusējuma ātrums un pēc tam ātrāk (75%) par noklusējuma ātrumu.
-
Iespēja vispirms modelēt
Modelējiet projektu klases priekšā, pirms visi skolēni mēģina vienlaikus. Sapulciniet skolēnus vienā zonā un atstājiet pietiekami daudz vietas, lai Speedbot varētu pārvietoties par 450 mm, ja tas ir novietots uz grīdas.Pastāstiet studentiem, ka tagad ir viņu kārta vadīt savu projektu. Pārliecinieties, vai tiem ir brīvs ceļš un neviens robots nesaskrienas.
4. darbība: brauciet uz priekšu un atpakaļgaitā dažādos ātrumos

-
Mainiet otro piedziņu pret bloku, lai brauktu atpakaļgaitā, nevis uz priekšu.
-
Pēc tam lejupielādējiet projektu.
-
Palaidiet projektu Speedbot robotā.
![]() Skolotāja rīkkopa
darbības pabeigšana
Skolotāja rīkkopa
darbības pabeigšana
-
Nav nepieciešams vēlreiz saglabāt projektu, jo VEXcode V5 tiks saglabāts automātiski.
-
Lai mainītu bloku [Drive for] no uz priekšu uz reverse, vienkārši noklikšķiniet uz nolaižamās izvēlnes un atlasiet atpakaļgaitā.
-
Ja skolēni izmanto datoru, palūdziet viņiem atvienot USB kabeli no Robot Brain. Ja robots ir pieslēgts datoram projekta izpildes laikā, robots var aizvilkt savienojuma kabeli.
-
Tā kā mēs neatlasām jaunu slotu, jaunais projekts tiks lejupielādēts 1. vietā un aizstās iepriekšējo projektu.
![]() Skolotāju padomi
Skolotāju padomi
Ja nepieciešams, palūdziet komandām dalīties ar testēšanas laukumu un bumbu, taču var izveidot arī vairākus testēšanas laukumus, katrs ar savu bumbu. Izlemiet, vai vēlaties iestatīt testēšanas apgabalu(-s), vai vēlaties, lai to dara studenti.
5. darbība. Pārbaudes zonas iestatīšana

Testēšanas zonas izkārtojuma piemērs
-
Izmantojiet lenti un skaitītāju, lai uz grīdas izveidotu 3 m līniju, piemēram, horizontālo līniju, kas parādīta attēlā.
-
Kad līnija ir izveidota, vēlreiz izmantojiet lenti un skaitītāja sviru, lai izveidotu 1 m līnijas pāri 3 m līnijai, piemēram, vertikālās līnijas attēlā iepriekš. Pie katras 50 cm atzīmes uz vertikālās līnijas uzlīmējiet 1 m līniju, sākot no 0 cm.
-
Īsākās horizontālās līnijas jācentrē uz garākās vertikālās līnijas.
-
-
Kamēr apgabals tiek izveidots, vienam vai diviem jūsu komandas locekļiem ir jāizveido jauns projekts ar nosaukumu Momentum. Iestatiet ātrumu uz 50% un lieciet Speedbot braukt uz priekšu līdz pirmajai līnijai 50 cm. Paturiet prātā 1 cm = 10 mm, lai robots virzīsies uz priekšu 50 cm vai 500 milimetrus.
![]() Skolotāja rīkkopa
-
Kāpēc šī aktivitāte?
Skolotāja rīkkopa
-
Kāpēc šī aktivitāte?
Datu vākšana un analīze, pat vienkārša modeļu atpazīšana, ir fundamentālas zinātnes prasmes. Šī darbība pievieno struktūru šai datu analīzei, novēršot bieži sastopamas kļūdas. Ņemiet vērā, ka instrukcijās nav teikts, ka skolēni jāmaina robota braukšanas attālums, kā arī jāmaina robota ātrums. Tas ir apzināts pielietojums tam, ko mācīšanās zinātnieki sauc par mainīgo lielumu kontroles stratēģiju. Ir svarīgi iemācīt iesācējiem izmeklētājiem vienlaikus manipulēt ar vienu mainīgo (ti, šajā gadījumā ar ātrumu), lai noteiktu tā ietekmi uz otru mainīgo (ti, attālumu, ko bumbiņa veic pēc sadursmes), jo tā ne vienmēr ir pieeja studentiem. spontāni, izmantojot minēšanas un pārbaudes pieeju. Tipiskas minēšanas un pārbaudes pieejas bieži vienlaikus manipulē ar vairāk nekā vienu mainīgo (ti, mainot gan ātrumu, gan robota nobraukto attālumu) un novērojot saplūšanas ietekmi uz attālumu, ko bumbiņa pārvietojas pēc rotācijas. Šī aktivitāte mēģina novirzīt studentus no tā, jo attiecības starp mainīgajiem lielumiem ir neskaidras. Vai tas ir lielāks robota ātrums, lielāks attālums, ko robots nobrauc, vai abi, kas liek bumbiņai virzīties tālāk? Mēs nevaram uz to atbildēt, ja vienlaikus manipulējam ar abiem mainīgajiem.
Tomēr komandas var spontāni mēģināt vadīt robotu dažādos attālumos. Ja to ievērojat, palūdziet viņiem mainīt tikai attālumu, bet saglabāt ātrumu tādu pašu, kāds tas bija izmēģinājumā ar sākotnējo 500 mm attālumu. Tādā veidā viņi var salīdzināt vienu un to pašu ātrumu ar dažādiem braukšanas attālumiem, lai noskaidrotu, vai robota braukšanas attālums ietekmē arī bumbiņas attālumu.
6. darbība: Enerģijas pārneses pārbaude sadursmju laikā


![]() Skolotāju padomi
Skolotāju padomi
-
Sagatavojiet laukumu, lai bumbiņa varētu atsist dažādos virzienos dažādos attālumos. Ja nepieciešams, aizveriet durvis un/vai logus.
-
Ātruma izpētes tabulu var saglabāt no apakšas, vai arī skolēni var atkārtoti izveidot tabulu savās inženierzinātņu piezīmju grāmatiņās.
-
Grupas inženieru piezīmju grāmatiņu novērtēšanas rubriku var atrast šeit (Google / .docx / .pdf), un rubriku atsevišķu piezīmju grāmatiņu novērtēšanai var atrast šeit (Google / .docx / . pdf). Ikreiz, kad plānojat novērtēt studentu darbu ar rubriku(-ām), noteikti dalieties ar rubriku, pirms viņi sāk strādāt pie projekta.
Centrējiet bumbu uz horizontālās līnijas 50 cm attālumā un novietojiet savu robotu tā, lai tā priekšpuse būtu centrēta uz horizontālās līnijas 0 cm attālumā. Pārliecinieties, ka robota priekšpuse ir vērsta bumbiņas virzienā. Palaidiet savu pirmo Momentum projektu, kura ātrums ir iestatīts uz 50%, un pievērsiet īpašu uzmanību, kad robots saduras ar bumbu.
Šajā datu tabulā ierakstiet iestatīto ātrumu, nobraukto attālumu un bumbiņas nobraukto attālumu (Google / .pdf). Tabulas pirmā rinda ir sākta, pamatojoties uz Momentum projektu, pie kura strādājāt iepriekšējā solī. Mēģinot iestatīt dažādus ātrumus, turpiniet pievienot datus šai tabulai. Pēc tam varat pievienot citu komandu datus, apspriežot savus atklājumus kā klasei.

Vācot datus, padomājiet par tālāk norādītajiem jautājumiem un atbildiet uz tiem savā inženierzinātņu piezīmju grāmatiņā.
-
Kā jūs varat pateikt, ka sadursmes laikā robota impulss pārnesa enerģiju uz bumbu? Paskaidrojiet sīkāk.
-
Atkārtojiet testu vēl vismaz divas reizes. Izmēģiniet ātrumu, kas mazāks par 50%. Atiestatiet bumbiņu tās pozīcijā un ierakstiet tabulā, cik tālu bumbiņa pārvietojas. Tāpat izmēģiniet ātrumu, kas lielāks par 50%. Atiestatiet bumbiņu tās pozīcijā un ierakstiet tabulā, cik tālu bumbiņa pārvietojas.
-
Kad visas grupas ir pabeigušas savus trīs testus, pārrunājiet ātrumus, ko izvēlējušās pārējās grupas, un to, cik tālu bumbiņa veica testus. Kad komandas dalās ar saviem datiem, pievienojiet savus rezultātus savai tabulai.
-
Meklējiet datos modeli(s). Vai lodes nobrauktais attālums palielinās vai samazinās, palielinoties iestatītajam ātrumam?
![]() Skolotāju rīkkopa
-
Atbildes
Skolotāju rīkkopa
-
Atbildes
-
Bumbiņas kustība ir pierādījums tam, ka robots sadursmes laikā pārnesa enerģiju. Kā pierādījumu skolēni var arī aprakstīt bumbiņas ātrumu pēc trieciena vai tās kustības virzienu.
-
Bumbiņas nobrauktais attālums ir atkarīgs no izmantotās bumbiņas masas/svara un robotam iestatītā ātruma.
-
Studentiem jāatzīst, ka lielāki ātrumi liek bumbiņai pārvietoties tālāk nekā ar mazāku ātrumu. Skaidri savienojiet to ar robota impulsu. Uzsveriet, ka robota svars nav mainījies, ir mainījies tikai tā ātrums, bet abi veicina robota impulsu. Pajautājiet viņiem, vai viņi domā, ka bumba aizceļotu tik tālu, ja robots būtu smagāks. Jādomā, ka tā būtu. Vairāk par bumbas masas ietekmi sadursmes laikā ir nākamajā lasījumā.
-
Studentu grupas varētu būt izvēlējušās ļoti mainīgus ātrumus, taču vispārējais mācību mērķis ir, lai skolēni apzinātos, ka lielāki ātrumi rada lielāku impulsu, kas sadursmes laikā nodod vairāk enerģijas uz bumbu.