
![]() Caja de herramientas para profesores
Caja de herramientas para profesores
-
Esquema de la actividad
Esta exploración primero presentará a los estudiantes cómo establecer la velocidad para conducir y luego les pedirá que exploren cómo la velocidad del robot afecta su impulso. Haga clic aquí (Google / .docx / .pdf) para ver el resumen de esta actividad. Comprender el impulso del robot será un concepto importante que se aplicará al juego de bolos Strike Challenge. -
Lo que programarán los estudiantes
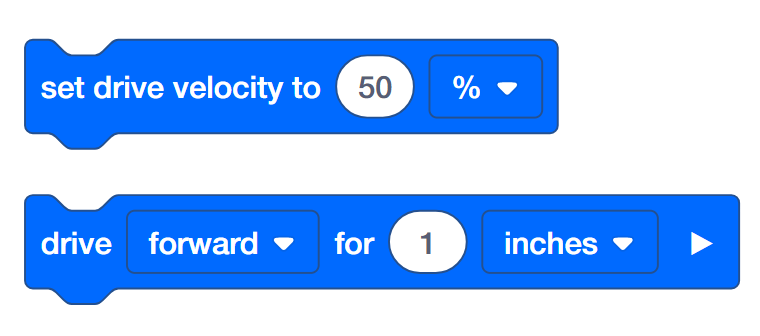
El uso del proyecto de plantilla Speedbot (Drivetrain 2-motors, No Gyro) permite a los estudiantes cambiar las configuraciones de velocidad del bloque [Drive for] simplemente agregando un bloque [Set drive speed] a un pila. La parte guiada de la actividad hace que los estudiantes trabajen con el bloque [Establecer velocidad de conducción] y el final de la actividad les pide que apliquen sus habilidades para programar la velocidad a pruebas de impulso y transferencia de energía.
¡Speedbot está listo para conducir a diferentes velocidades!
Esta investigación le ayudará a aprender más sobre cómo programar el Speedbot para conducir a las velocidades más adecuadas para la tarea. Al final del Strike Challenge, necesitarás encontrar una velocidad para el Speedbot que le permita ser rápido y tener un gran impulso, pero mantener el control para golpear la pelota en un buen ángulo y con gran fuerza.
VEXcode V5 que se utilizará en la primera parte de esta investigación:
![]() Consejos para profesores
Consejos para profesores
Si es la primera vez que el estudiante utiliza VEXcode V5, puede consultar los tutoriales en cualquier momento durante esta exploración. Los tutoriales se encuentran en la barra de herramientas.

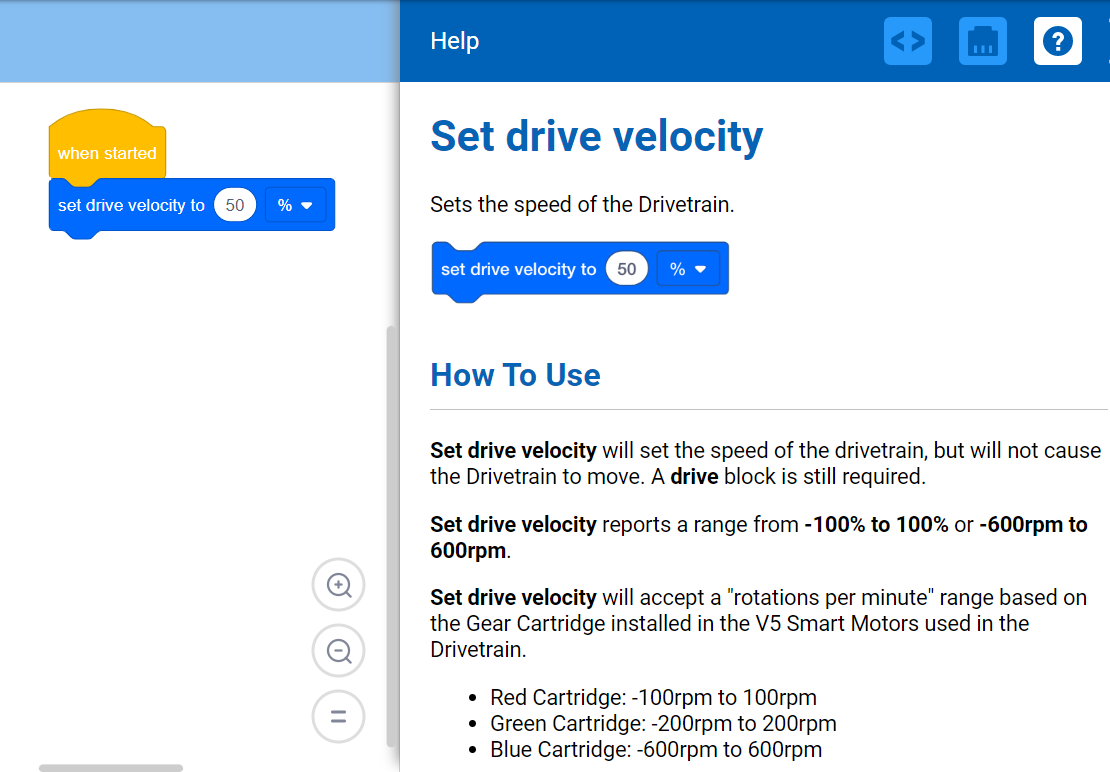
Para obtener más información sobre el bloque, abra Ayuda y luego seleccione el bloque sobre el que desea leer.
Cada grupo de estudiantes deberá recibir el hardware necesario y el cuaderno de ingeniería del grupo. Luego abra VEXcode V5.
| Cantidad | Materiales necesitados |
|---|---|
| 1 |
robot velocista |
| 1 |
Batería de robot cargada |
| 1 |
Código VEX V5 |
| 1 |
Cable USB (si usa una computadora) |
| 1 |
Cuaderno de ingeniería |
| 1 |
Balón (del tamaño y forma de un balón de fútbol) |
| 1 |
Espacio libre de 3m x 3m |
| 1 |
Metro o regla |
| 1 |
Rollo de cinta |
| 1 |
Tabla de datos |
![]() Consejos para profesores
Consejos para profesores
-
Modele cada uno de los pasos para verificar que el Speedbot esté listo para que los estudiantes adquieran el hábito de hacerlo.
Paso 1: Preparándose para la Exploración
Preparándose para la exploración
Antes de comenzar la actividad, ¿tienes listo cada uno de estos elementos?
-
¿Están todos los motores conectados a los puertos correctos?
-
¿Están los cables inteligentes completamente insertados en todos los motores?
-
¿Está el Cerebro encendido?
Paso 2: Iniciar un nuevo proyecto
Antes de comenzar su proyecto, seleccione el proyecto Speedbot (Drivetrain 2-motors, No Gyro) - Plantilla. El proyecto de plantilla contiene la configuración del motor del Speedbot. Si no se utiliza la plantilla, su robot no ejecutará el proyecto correctamente.

-
Abra el menú Archivo.
-
Seleccionar Abrir Ejemplos.
-
Seleccione y abra el proyecto de plantilla Speedbot (Drivetrain 2-motors, No Gyro).
-
Cambie el nombre de su proyecto Drive Velocity porque usaremos el bloque [Establecer velocidad del variador].
-
Guarde su proyecto.
-
Para obtener ayuda para guardar un proyecto, revise los tutoriales dentro de VEXcode V5.

-
-
Verifique que el nombre del proyecto Drive Velocity esté ahora en la ventana en el centro de la barra de herramientas.

![]() Consejos para profesores
Consejos para profesores
-
Asegúrese de que los estudiantes hayan seleccionado el proyecto de plantilla Speedbot (Drivetrain 2-motors, No Gyro).
-
Puede indicarles a los estudiantes que hay varias plantillas para seleccionar en la página Ejemplos . A medida que construyan y utilicen otros robots, tendrán la oportunidad de utilizar diferentes plantillas.
![]() Caja de herramientas para profesores
Caja de herramientas para profesores

-
Guardando proyectos
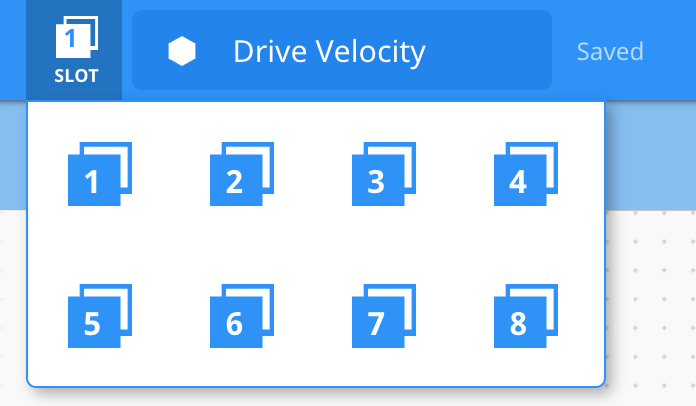
Señale que cuando abrieron VEXcode V5 por primera vez, la ventana tenía la etiqueta VEXcode Proyecto y no se guardó (indicado en la barra de herramientas). VEXcode Project es el nombre del proyecto predeterminado cuando se abre VEXcode V5 por primera vez. Una vez que se cambia el nombre del proyecto Drive Velocity y se guarda, la pantalla se actualiza a Guardado. Usando esta ventana en la barra de herramientas, es fácil verificar que los estudiantes estén usando el proyecto correcto y que esté guardado.Una vez que se guarda inicialmente un proyecto, VEXcode V5 guarda automáticamente cualquier cambio posterior, como lo indica el mensaje junto al nombre del proyecto.
Dígales a los estudiantes que ahora están listos para comenzar su primer proyecto. Explique a los estudiantes que, siguiendo unos sencillos pasos, podrán crear y ejecutar un proyecto que establecerá la velocidad de la transmisión del Speedbot.
-
Detenerse y discutir
Este es un buen punto para hacer una pausa y hacer que los estudiantes revisen los pasos que acaban de completar al iniciar un nuevo proyecto en VEXcode V5 de forma individual o en grupos. Pida a los estudiantes que reflexionen individualmente antes de compartir con su grupo o con toda la clase.
Paso 3: avance 450 mm a diferentes velocidades
-
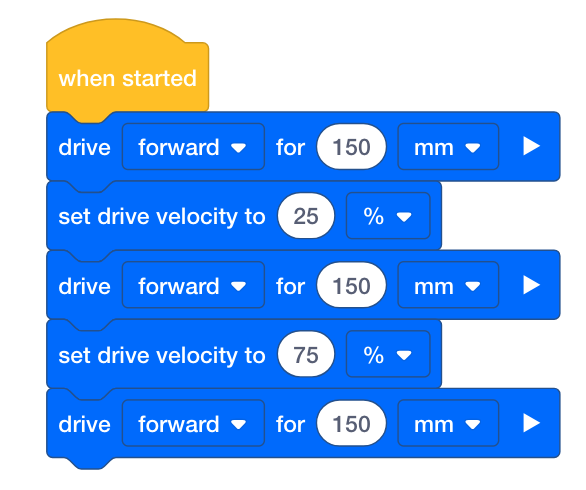
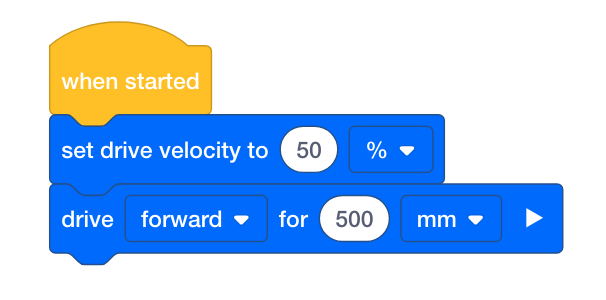
Construya este proyecto en VEXcode V5.
![]() Caja de herramientas para profesores
Caja de herramientas para profesores
Observe que en esta pila el segundo y tercer bloque son iguales que el cuarto y quinto bloque. Después de agregar el tercer bloque, el estudiante puede hacer clic derecho o hacer clic largo en el segundo bloque y elegir Duplicar para agregar el cuarto y quinto bloque. Entonces la velocidad del cuarto bloque se puede cambiar al 75%.

-
Seleccione el ícono de Ranura. Puede descargar su proyecto en una de las ocho ranuras disponibles en Robot Brain. Seleccione la ranura 1.
-
Conecte el robot a su computadora o tableta. El ícono del Cerebro en la barra de herramientas se vuelve verde una vez que se ha realizado una conexión exitosa.

-
Luego, haga clic en el botón Descargar en la barra de herramientas para descargar el proyecto Drive Velocity al Robot Brain.
-
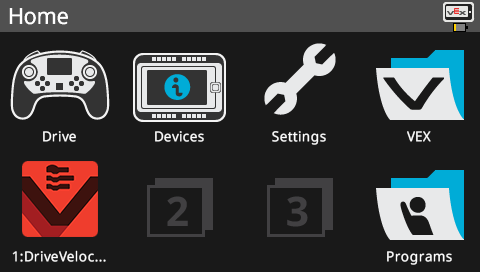
Verifica que tu proyecto se haya descargado en el Speedbot's Brain mirando la pantalla del Robot Brain. El nombre del proyecto debe aparecer en la ranura 1.
-
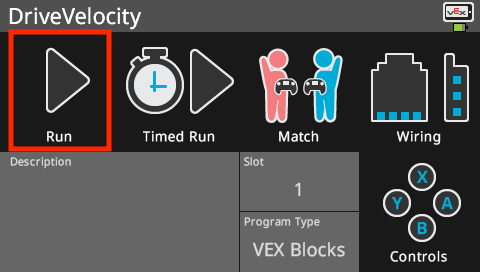
Ejecute el proyecto en el robot Speedbot seleccionando el proyecto y luego presionando Ejecutar.
![]() Caja de herramientas para profesores
Caja de herramientas para profesores
-
Deténgase y discuta
Pida a los estudiantes que predigan lo que creen que sucederá cuando este proyecto se descargue y se ejecute en el robot Speedbot. Dígales a los estudiantes que registren sus predicciones en sus cuadernos de ingeniería. Si el tiempo lo permite, pida a cada grupo que comparta su predicción.Los estudiantes deben predecir que el Speedbot primero avanzará a su velocidad predeterminada (50%), luego más lento (25%) que la velocidad predeterminada y luego más rápido (75%) que la velocidad predeterminada.
-
Opción de modelar primero
Modelar ejecutando el proyecto frente a la clase antes de que todos los estudiantes lo intenten a la vez. Reúna a los estudiantes en un área y deje suficiente espacio para que el Speedbot se mueva 450 mm si está colocado en el suelo.Dígales a los estudiantes que ahora es su turno de ejecutar su proyecto. Asegúrate de que tengan un camino despejado y de que ningún robot choque entre sí.
Paso 4: Conduzca hacia adelante y hacia atrás a diferentes velocidades

-
Cambie el segundo bloque por bloque para conducir en reversa en lugar de avanzar.
-
Luego descarga el proyecto.
-
Ejecute el proyecto en el robot Speedbot.
![]() Caja de herramientas para profesores
-
Completando el paso 4
Caja de herramientas para profesores
-
Completando el paso 4
-
No es necesario volver a guardar el proyecto porque VEXcode V5 se guardará automáticamente.
-
Para cambiar el bloque [Conducir para] de adelante a atrás, simplemente haga clic en el menú desplegable y seleccione atrás.
-
Si los estudiantes están usando una computadora, pídales que desconecten el cable USB del Robot Brain. Tener el robot conectado a una computadora mientras ejecuta un proyecto podría hacer que el robot tire del cable de conexión.
-
Debido a que no estamos seleccionando una nueva ranura, el nuevo proyecto se descargará en la ranura 1 y reemplazará el proyecto anterior.
![]() Consejos para profesores
Consejos para profesores
Pida a los equipos que compartan el área de prueba y el balón si es necesario, pero también se pueden configurar varias áreas de prueba, cada una con su propio balón. Decida si desea configurar las áreas de prueba o si desea que los estudiantes lo hagan.
Paso 5: Configurar su área de prueba

Ejemplo de diseño del área de prueba
-
Utilice cinta adhesiva y un metro para crear una línea de 3 m en el suelo como la línea horizontal que se muestra en la imagen de arriba.
-
Una vez creada la línea, use cinta adhesiva y su metro una vez más para crear líneas de 1 m a lo largo de la línea de 3 m, como las líneas verticales en la imagen de arriba. Pegue una línea de 1 m en cada marca de 50 cm en la línea vertical comenzando en 0 cm.
-
Las líneas horizontales más cortas deben estar centradas en la línea vertical más larga.
-
-
Mientras se configura el área, uno o dos miembros de su equipo deben crear un nuevo proyecto llamado Momentum. Establezca la velocidad al 50% y haga que el Speedbot avance hasta la primera línea a 50 cm. Tenga en cuenta que 1 cm = 10 mm, por lo que el robot avanzará 50 cm o 500 milímetros.
![]() Caja de herramientas para profesores
-
¿Por qué esta actividad?
Caja de herramientas para profesores
-
¿Por qué esta actividad?
La recopilación y el análisis de datos, incluso el simple reconocimiento de patrones, son habilidades científicas fundamentales. Esta actividad agrega estructura a ese análisis de datos al evitar errores comunes. Observe que las instrucciones no les dicen a los estudiantes que varíen la distancia de recorrido del robot junto con la variación de la velocidad del robot. Esta es una aplicación intencional de lo que los científicos del aprendizaje llaman la estrategia de control de variables. Enseñar a los investigadores novatos a manipular una variable a la vez (es decir, la velocidad en este caso) para determinar su influencia en una segunda variable (es decir, la distancia que recorre la pelota después de la colisión) es importante porque no es necesariamente un enfoque que los estudiantes adoptarán. espontáneamente mediante un enfoque de adivinar y comprobar. Los enfoques típicos de adivinar y verificar a menudo manipulan más de una variable a la vez (es decir, cambiando tanto la velocidad como la distancia que recorre el robot) y observan el impacto de la confluencia en la distancia que recorre la bola después de la rotación. Esta actividad intenta alejar a los estudiantes de eso porque las relaciones entre las variables son ambiguas. ¿Es la mayor velocidad del robot, la mayor distancia que recorre el robot o ambas cosas las que hacen que la bola viaje más lejos? No podemos responder a eso cuando manipulamos ambas variables al mismo tiempo.
Sin embargo, los equipos podrían intentar espontáneamente conducir el robot a diferentes distancias. Si observa esto, pídales que solo cambien la distancia pero que mantengan la velocidad igual que en una prueba con la distancia original de 500 mm. De esa manera, pueden comparar la misma velocidad con diferentes distancias de conducción para ver si la distancia de conducción del robot también influye en la distancia que viaja la pelota.
Paso 6: Prueba de la transferencia de energía durante las colisiones


![]() Consejos para profesores
Consejos para profesores
-
Prepare el área para que la pelota rebote en diferentes direcciones y a diferentes distancias. Cierre puertas y/o ventanas según sea necesario.
-
La tabla para Explorar la velocidad se puede guardar desde abajo o los estudiantes pueden recrear la tabla en sus cuadernos de ingeniería.
-
Puede encontrar una rúbrica para evaluar los cuadernos de ingeniería en equipo aquí (Google / .docx / .pdf), y una rúbrica para evaluar los cuadernos individuales aquí (Google / .docx / . pdf). Siempre que planee evaluar el trabajo de un estudiante con una(s) rúbrica(s), asegúrese de compartir la rúbrica con ellos antes de que comiencen a trabajar en el proyecto.
Centre la bola en la línea horizontal a 50 cm y coloque su robot de modo que la parte delantera quede centrada en la línea horizontal a 0 cm. Asegúrese de que la parte frontal del robot esté orientada en la dirección de la bola. Ejecute su primer proyecto Momentum que tenga la velocidad establecida en 50% y preste mucha atención mientras el robot choca con la pelota.
Registre la velocidad establecida, la distancia recorrida y la distancia recorrida por la pelota en esta tabla de datos (Google ). La primera fila de la tabla se inició según el proyecto Momentum en el que trabajó en el paso anterior. Continúe agregando datos a esta tabla mientras intenta configurar diferentes velocidades. Luego puede agregar los datos de otros equipos mientras discute sus hallazgos como clase.

Piense y responda las siguientes preguntas en su cuaderno de ingeniería mientras recopila sus datos:
-
¿Cómo puedes saber que el impulso del robot transfirió energía a la pelota durante la colisión? Explique con detalles.
-
Repita la prueba al menos dos veces más. Pruebe una velocidad inferior al 50%. Vuelva a colocar la pelota en su posición y registre en la tabla qué tan lejos viaja la pelota. Además, pruebe con una velocidad superior al 50%. Vuelva a colocar la pelota en su posición y registre en la tabla qué tan lejos viaja la pelota.
-
Cuando todos los grupos hayan completado sus tres pruebas, analice las velocidades que eligieron los otros grupos y qué distancia viajó la pelota en sus pruebas. A medida que los equipos comparten sus datos, agregue sus hallazgos a su tabla.
-
Busque patrones en los datos. ¿La distancia recorrida por la pelota aumenta o disminuye a medida que aumenta la velocidad establecida?
![]() Caja de herramientas para profesores
-
Respuestas
Caja de herramientas para profesores
-
Respuestas
-
El movimiento de la pelota es evidencia de que el robot transfirió energía durante la colisión. Los estudiantes también podrían describir la velocidad de la pelota después del impacto o su dirección de viaje como evidencia.
-
La distancia que recorre la pelota depende de la masa/peso de la pelota utilizada y de la velocidad establecida para el robot.
-
Los estudiantes deben reconocer que las velocidades más altas hacen que la pelota viaje más lejos que las velocidades más bajas. Conecte esto explícitamente con el impulso del robot. Resalte que el peso del robot no ha cambiado, sólo su velocidad, pero que ambos contribuyen al impulso del robot. Pregúnteles si creen que la pelota viajaría tan lejos si el robot fuera más pesado. Probablemente lo haría. Hay más información sobre los efectos de la masa de la pelota durante la colisión en la siguiente lectura.
-
Los grupos de estudiantes podrían haber seleccionado velocidades muy variables, pero el objetivo general de aprendizaje es que los estudiantes reconozcan que velocidades más altas conducen a un mayor impulso que transfiere más energía a la pelota durante las colisiones.