
![]() Zestaw narzędzi nauczyciela
Zestaw narzędzi nauczyciela
-
Zarys ćwiczenia
Podczas tej eksploracji uczniowie najpierw zapoznają się z ustalaniem prędkości jazdy, a następnie poproszą ich o zbadanie, w jaki sposób prędkość robota wpływa na jego pęd. Kliknij tutaj (Google / .docx / .pdf), aby zobaczyć zarys tego działania. Zrozumienie pędu robota będzie ważną koncepcją do zastosowania w grze w kręgle Strike Challenge. -
Co będą programować uczniowie
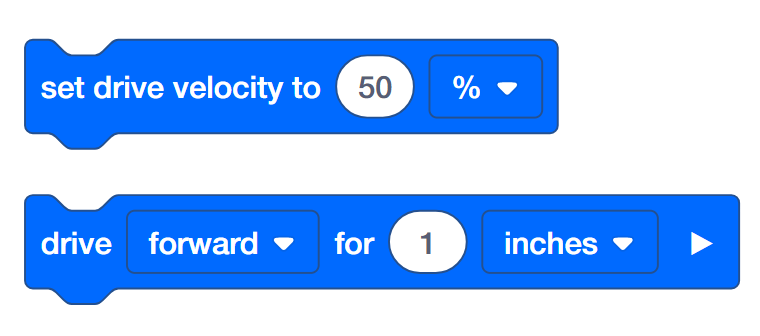
Korzystanie z szablonu projektu Speedbot (2 silniki układu napędowego, bez żyroskopu) umożliwia uczniom zmianę ustawień prędkości bloku [Drive for] poprzez proste dodanie bloku [Ustaw prędkość napędu] do stos. Część ćwiczenia z przewodnikiem polega na pracy uczniów z blokiem [Ustaw prędkość napędu], a na koniec ćwiczenia zostaną oni poproszeni o zastosowanie swoich umiejętności programowania prędkości w testach transferu pędu i energii.
Speedbot jest gotowy do jazdy z różnymi prędkościami!
To badanie pomoże Ci dowiedzieć się więcej na temat programowania Speedbota tak, aby jechał z prędkością najlepiej dostosowaną do danego zadania. W końcowym wyzwaniu Strike Challenge będziesz musiał znaleźć prędkość Speedbota, która pozwoli mu być szybkim i mieć duży pęd, a jednocześnie zachować kontrolę, aby uderzyć piłkę pod dobrym kątem i z dużą siłą.
VEXcode V5, który zostanie użyty w pierwszej części tego dochodzenia:
![]() Wskazówki dla nauczycieli
Wskazówki dla nauczycieli
Jeśli uczeń po raz pierwszy korzysta z VEXcode V5, może w każdej chwili skorzystać z Samouczków. Samouczki znajdują się na pasku narzędzi.

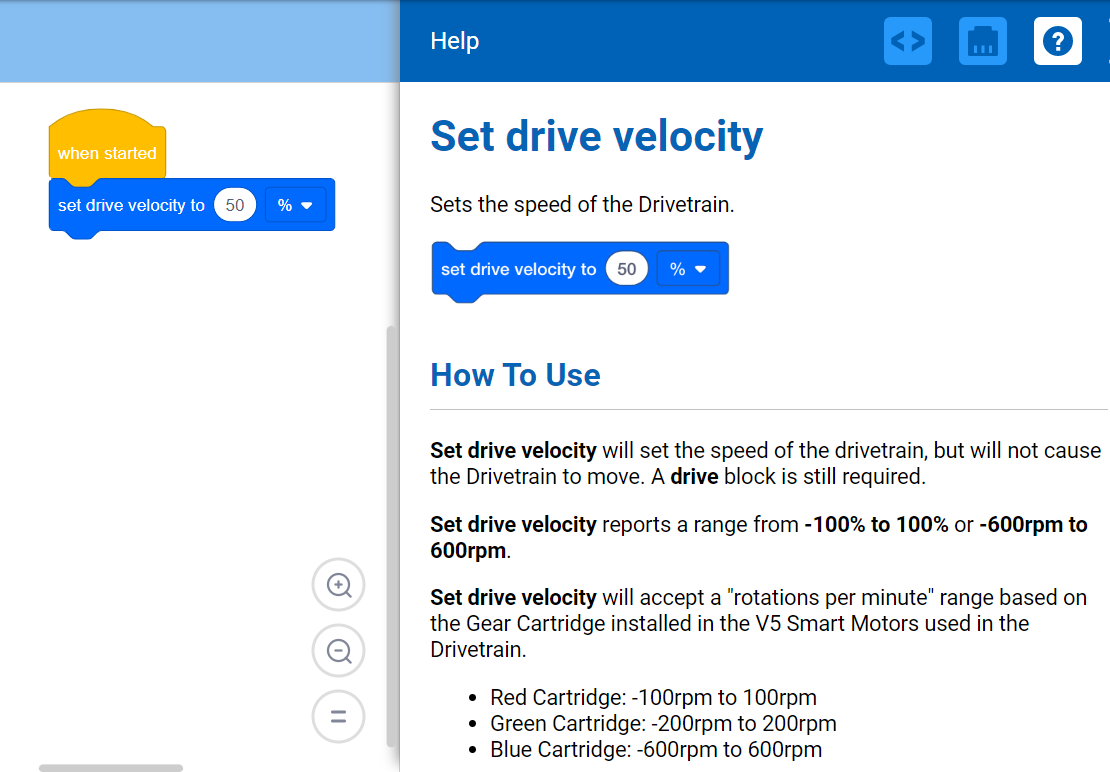
Aby dowiedzieć się więcej o bloku, otwórz Pomoc i następnie wybierz blok, o którym chcesz przeczytać.
Każda grupa uczniów powinna otrzymać wymagany sprzęt i notes inżynierski grupy. Następnie otwórz VEXcode V5.
| Ilość | Potrzebne materiały |
|---|---|
| 1 |
Robot Speedbot |
| 1 |
Naładowany akumulator robota |
| 1 |
Kod VEX V5 |
| 1 |
Kabel USB (w przypadku korzystania z komputera) |
| 1 |
Notatnik inżynieryjny |
| 1 |
Piłka (wielkość i kształt piłki nożnej) |
| 1 |
Wolna przestrzeń o wymiarach 3m x 3m |
| 1 |
Miernik lub linijka |
| 1 |
Rolka taśmy |
| 1 |
Tabela danych |
![]() Wskazówki dla nauczycieli
Wskazówki dla nauczycieli
-
Modeluj każdy etap sprawdzania, czy Speedbot jest gotowy, tak aby uczniowie wyrobili sobie w tym nawyk.
Krok 1: Przygotowanie do eksploracji
Przygotowanie do eksploracji
Czy zanim rozpoczniesz ćwiczenie, masz gotowy każdy z tych elementów?
-
Czy wszystkie silniki są podłączone do właściwych portów?
-
Czy inteligentne kable są całkowicie włożone do wszystkich silników?
-
Czy Brain jest włączony?
-
Czy akumulator jest naładowany?
Krok 2: Rozpocznij nowy projekt
Zanim zaczniesz swój projekt, wybierz Speedbot (2 silniki układu napędowego, bez żyroskopu) - projekt szablonowy. Projekt szablonu zawiera konfigurację silnika Speedbota. Jeśli szablon nie zostanie użyty, Twój robot nie uruchomi poprawnie projektu.

-
Otwórz menu Plik.
-
Wybierz Otwórz Przykłady.
-
Wybierz i otwórz projekt szablonowy Speedbot (2 silniki układu napędowego, bez żyroskopu).
-
Zmień nazwę swojego projektu Drive Velocity ponieważ będziemy używać bloku [Set drive speed].
-
Zapisz swój projekt.
-
Aby uzyskać pomoc dotyczącą zapisywania projektu, przejrzyj samouczki w VEXcode V5.

-
-
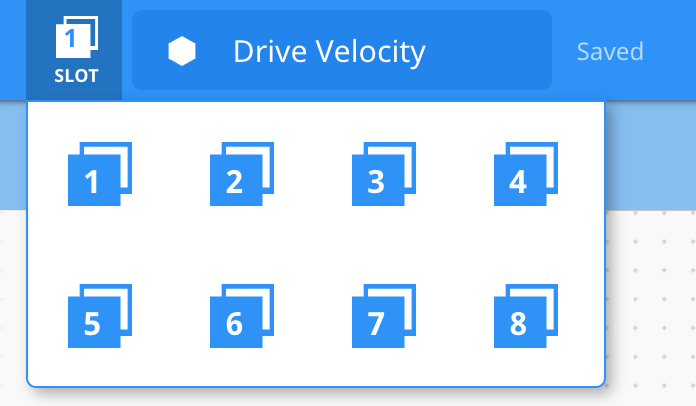
Sprawdź, czy nazwa projektu Drive Velocity znajduje się teraz w oknie pośrodku paska narzędzi.

![]() Wskazówki dla nauczycieli
Wskazówki dla nauczycieli
-
Upewnij się, że uczniowie wybrali projekt szablonowy Speedbot (2 silniki układu napędowego, bez żyroskopu).
-
Możesz wskazać uczniom, że na stronie Przykłady dostępnych jest kilka szablonów do wyboru. Budując i używając innych robotów, będą mieli okazję korzystać z różnych szablonów.
![]() Zestaw narzędzi nauczyciela
Zestaw narzędzi nauczyciela

-
Zapisywanie projektów
Zwróć uwagę, że kiedy po raz pierwszy otworzyli VEXcode V5, okno miało etykietę VEXcode Project i nie zostało zapisane (co jest wskazane na pasku narzędzi). Projekt VEXcode to domyślna nazwa projektu przy pierwszym otwarciu VEXcode V5. Po zmianie nazwy projektu na Drive Velocity i zapisaniu jego zawartość zostanie zmieniona na Zapisano. Korzystając z tego okna na pasku narzędzi, można łatwo sprawdzić, czy uczniowie korzystają z właściwego projektu i czy został on zapisany.Po wstępnym zapisaniu projektu VEXcode V5 automatycznie zapisuje wszelkie późniejsze zmiany, jak wskazuje komunikat obok nazwy projektu.
Powiedz uczniom, że są teraz gotowi, aby rozpocząć swój pierwszy projekt. Wyjaśnij uczniom, że wykonując kilka prostych kroków, będą w stanie stworzyć i uruchomić projekt, który określi prędkość układu napędowego Speedbota.
-
Zatrzymaj się i omów
To dobry moment na przerwę i poproszenie uczniów o przejrzenie kroków, które właśnie zostały wykonane podczas rozpoczynania nowego projektu w VEXcode V5, indywidualnie lub w grupach. Poproś uczniów, aby zastanowili się indywidualnie, zanim podzielą się informacjami w swojej grupie lub całej klasie.
Krok 3: Jedź do przodu na odległość 450 mm z różnymi prędkościami
-
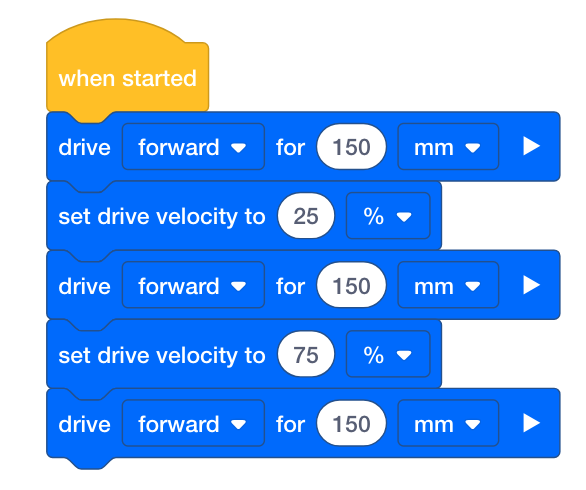
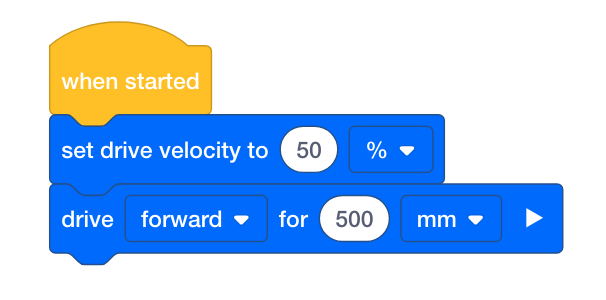
Zbuduj ten projekt w VEXcode V5.
![]() Zestaw narzędzi nauczyciela
Zestaw narzędzi nauczyciela
Zauważ, że w tym stosie drugi i trzeci blok są takie same, jak czwarty i piąty blok. Po dodaniu trzeciego bloku uczeń może kliknąć drugi blok prawym przyciskiem myszy lub przytrzymać go i wybrać opcję Duplikuj, aby dodać czwarty i piąty blok. Następnie prędkość czwartego bloku można zmienić na 75%.

-
Wybierz ikonę gniazda. Możesz pobrać swój projekt do jednego z ośmiu dostępnych miejsc w Robot Brain. Wybierz miejsce 1.
-
Podłącz robota do komputera lub tabletu. Po pomyślnym nawiązaniu połączenia ikona Brain na pasku narzędzi zmieni kolor na zielony.

-
Następnie kliknij przycisk Pobierz na pasku narzędzi, aby pobrać projekt Drive Velocity do Robot Brain.
-
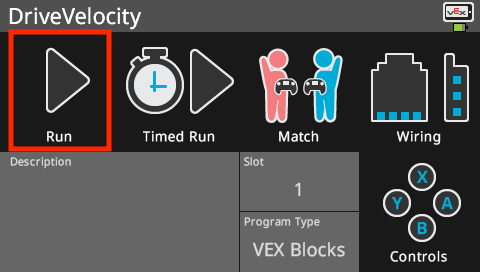
Sprawdź, czy projekt został pobrany do Speedbot's Brain, patrząc na ekran Robot Brain. Nazwa projektu powinna być wymieniona w polu 1.
-
Uruchom projekt na robocie Speedbot, wybierając projekt i naciskając Uruchom.
![]() Zestaw narzędzi nauczyciela
Zestaw narzędzi nauczyciela
-
Zatrzymaj się i omów
Poproś uczniów, aby przewidzieli, co ich zdaniem się stanie, gdy ten projekt zostanie pobrany i uruchomiony na robocie Speedbot. Powiedz uczniom, aby zapisali swoje przewidywania w zeszytach inżynierskich. Jeśli czas na to pozwala, poproś każdą grupę o podzielenie się swoją prognozą.Uczniowie powinni przewidzieć, że Speedbot będzie najpierw poruszał się do przodu ze swoją domyślną prędkością (50%), następnie wolniej (25%) niż domyślna prędkość, a następnie szybciej (75%) niż domyślna prędkość.
-
Opcja najpierw modelowania
Modeluj prowadzenie projektu przed klasą, zanim wszyscy uczniowie spróbują jednocześnie. Zbierz uczniów w jednym miejscu i zostaw wystarczająco dużo miejsca, aby Speedbot mógł przesunąć się o 450 mm, jeśli zostanie umieszczony na podłodze.Powiedz uczniom, że teraz ich kolej na realizację projektu. Upewnij się, że mają wolną drogę i że żadne roboty nie wpadną na siebie.
Krok 4: Jedź do przodu i do tyłu z różnymi prędkościami

-
Zmień drugi napęd na blok, aby jechać do tyłu zamiast do przodu.
-
Następnie pobierz projekt.
-
Uruchom projekt na robocie Speedbot.
![]() Zestaw narzędzi nauczyciela
-
Ukończenie kroku 4
Zestaw narzędzi nauczyciela
-
Ukończenie kroku 4
-
Nie ma potrzeby ponownego zapisywania projektu, ponieważ VEXcode V5 dokona automatycznego zapisu.
-
Aby zmienić blok [Jedź na] z do przodu do do tyłu, po prostu kliknij menu rozwijane i wybierz do tyłu.
-
Jeśli uczniowie korzystają z komputera, poproś ich o odłączenie kabla USB od Robot Brain. Podłączenie robota do komputera podczas wykonywania projektu może spowodować, że robot będzie ciągnął za kabel połączeniowy.
-
Ponieważ nie wybieramy nowego slotu, nowy projekt zostanie pobrany do Slotu 1 i zastąpi poprzedni projekt.
![]() Wskazówki dla nauczycieli
Wskazówki dla nauczycieli
W razie potrzeby poproś zespoły, aby podzieliły się obszarem testowym i piłką, ale można również utworzyć wiele obszarów testowych, każdy z własną piłką. Zdecyduj, czy chcesz ustawić obszary testowe, czy też chcesz, aby zrobili to uczniowie.
Krok 5: Konfiguracja obszaru testowego

Przykładowy układ obszaru testowego
-
Za pomocą taśmy i miarki utwórz na podłodze linię o długości 3 m, jak pozioma linia pokazana na powyższym obrazku.
-
Po utworzeniu linii użyj jeszcze raz taśmy i miarki, aby utworzyć 1 m linii na 3 m linii, tak jak pionowe linie na powyższym obrazku. Przyklej taśmą linię o długości 1 m w odstępach co 50 cm na linii pionowej, zaczynając od 0 cm.
-
Krótsze linie poziome powinny być wyśrodkowane na dłuższej linii pionowej.
-
-
Podczas konfigurowania obszaru jeden lub dwóch członków Twojego zespołu powinno stworzyć nowy projekt o nazwie Momentum. Ustaw prędkość na 50% i pozwól Speedbotowi podjechać do pierwszej linii na wysokości 50 cm. Pamiętaj, że 1 cm = 10 mm, aby robot przejechał do przodu 50 cm lub 500 milimetrów.
![]() Teacher Toolbox
-
Dlaczego to ćwiczenie?
Teacher Toolbox
-
Dlaczego to ćwiczenie?
Gromadzenie i analiza danych, nawet proste rozpoznawanie wzorców, to podstawowe umiejętności naukowe. To działanie dodaje struktury analizie danych, zapobiegając typowym błędom. Zwróć uwagę, że instrukcje nie mówią uczniom, aby zmieniali odległość, na jaką porusza się robot, jednocześnie zmieniając prędkość robota. Jest to celowe zastosowanie tego, co naukowcy zajmujący się uczeniem się nazywają strategią kontroli zmiennych. Nauczenie początkujących badaczy manipulowania jedną zmienną na raz (w tym przypadku prędkością) w celu określenia jej wpływu na drugą zmienną (tj. odległość, jaką przebędzie piłka po zderzeniu) jest ważne, ponieważ niekoniecznie jest to podejście, które uczniowie przyjmą spontanicznie, metodą zgadywania i sprawdzania. Typowe podejście polegające na zgadywaniu i sprawdzaniu często manipuluje więcej niż jedną zmienną na raz (tj. zmienia się zarówno prędkość, jak i odległość, jaką pokonuje robot) i obserwuje wpływ zbieżności na odległość, jaką pokonuje piłka po obrocie. To ćwiczenie ma na celu odciągnięcie uczniów od tego tematu, ponieważ relacje między zmiennymi są wówczas niejednoznaczne. Czy to większa prędkość robota, im większa odległość, jaką robot pokonuje, czy też jedno i drugie powoduje, że piłka leci dalej? Nie możemy odpowiedzieć na to pytanie, manipulując obiema zmiennymi jednocześnie.
Jednakże zespoły mogą spontanicznie próbować prowadzić robota na różne odległości. Jeśli to zaobserwujesz, poproś ich jedynie o zmianę odległości, ale utrzymanie prędkości na poziomie takim, jak było w próbie z pierwotną odległością 500 mm. W ten sposób mogą porównać tę samą prędkość z różnymi dystansami, aby sprawdzić, czy odległość przebyta przez robota ma również wpływ na odległość, jaką pokonuje piłka.
Krok 6: Testowanie przenoszenia energii podczas zderzeń


![]() Wskazówki dla nauczycieli
Wskazówki dla nauczycieli
-
Przygotuj miejsce, w którym piłka będzie odbijać się w różnych kierunkach i na różne odległości. W razie potrzeby zamknij drzwi i/lub okna.
-
Tabela badania prędkości może zostać zapisana poniżej lub uczniowie mogą odtworzyć tę tabelę w swoich notatnikach inżynierskich.
-
Rubrykę dotyczącą oceny notatników inżynieryjnych można znaleźć tutaj (Google / .docx / .pdf), a rubrykę dotyczącą oceny indywidualnych notatników można znaleźć tutaj (Google / .docx / .). Ilekroć planujesz ocenić pracę uczniów za pomocą rubryk, pamiętaj, aby udostępnić im tę rubrykę, zanim zaczną pracować nad projektem.
Wyśrodkuj piłkę na linii poziomej w odległości 50 cm i umieść robota tak, aby jego przód był wyśrodkowany na linii poziomej w odległości 0 cm. Upewnij się, że przód robota jest skierowany w stronę piłki. Uruchom swój pierwszy projekt Momentum z prędkością ustawioną na 50% i zwracaj szczególną uwagę, gdy robot zderza się z piłką.
Zapisz ustawioną prędkość, przebytą odległość i odległość przebytą przez piłkę w tej tabeli danych (Google / .pdf). Pierwszy wiersz tabeli został dla Ciebie uruchomiony w oparciu o projekt Momentum, nad którym pracowałeś w poprzednim kroku. Kontynuuj dodawanie danych do tej tabeli, próbując ustawić różne prędkości. Następnie możesz dodać dane innych zespołów, omawiając swoje ustalenia w klasie.

Podczas gromadzenia danych pomyśl i odpowiedz na poniższe pytania w swoim notatniku inżynierskim:
-
Jak można stwierdzić, że pęd robota przekazał energię piłce podczas zderzenia? Wyjaśnij ze szczegółami.
-
Powtórz test jeszcze co najmniej dwa razy. Spróbuj ustawić prędkość mniejszą niż 50%. Ustaw piłkę na swoim miejscu i zapisz w tabeli, jak daleko przeleciała piłka. Spróbuj także prędkości większej niż 50%. Ustaw piłkę na swoim miejscu i zapisz w tabeli, jak daleko przeleciała piłka.
-
Kiedy wszystkie grupy zakończą swoje trzy testy, omówcie prędkości wybrane przez pozostałe grupy i odległość, jaką przebyła piłka w swoich testach. Gdy zespoły będą udostępniać swoje dane, dodawaj wnioski do tabeli.
-
Poszukaj wzorców w danych. Czy droga przebyta przez piłkę zwiększa się czy zmniejsza wraz ze wzrostem zadanej prędkości?
![]() Zestaw narzędzi dla nauczycieli
-
Odpowiedzi
Zestaw narzędzi dla nauczycieli
-
Odpowiedzi
-
Ruch piłki świadczy o tym, że robot podczas zderzenia przekazał energię. Jako dowód uczniowie mogą również opisać prędkość piłki po uderzeniu lub kierunek jej ruchu.
-
Odległość, jaką pokonuje piłka, zależy od masy/ciężaru użytej piłki i prędkości ustawionej dla robota.
-
Uczniowie powinni zdawać sobie sprawę, że wyższe prędkości powodują, że piłka leci dalej niż mniejsze prędkości. Wyraźnie połącz to z pędem robota. Podkreśl, że ciężar robota się nie zmienił, a jedynie jego prędkość, ale obie te rzeczy mają wpływ na pęd robota. Zapytaj ich, czy ich zdaniem piłka poleciałaby tak daleko, gdyby robot był cięższy. Prawdopodobnie tak. Więcej na temat wpływu masy piłki podczas zderzenia napiszemy w następnym czytaniu.
-
Grupy uczniów mogły wybrać bardzo zmienne prędkości, ale ogólnym celem nauczania jest uświadomienie uczniom, że wyższe prędkości prowadzą do większego pędu, który przekazuje więcej energii piłce podczas zderzeń.