
Speedbot 已准备好以不同的速度行驶!
这项调查将帮助您了解更多有关对 Speedbot 进行编程以便以最适合任务的速度行驶的信息。 在最后的打击挑战中,您需要为 Speedbot 找到一个速度,使其能够快速且具有很大的动力,但仍能保持控制,以便以良好的角度和很大的力量击球。
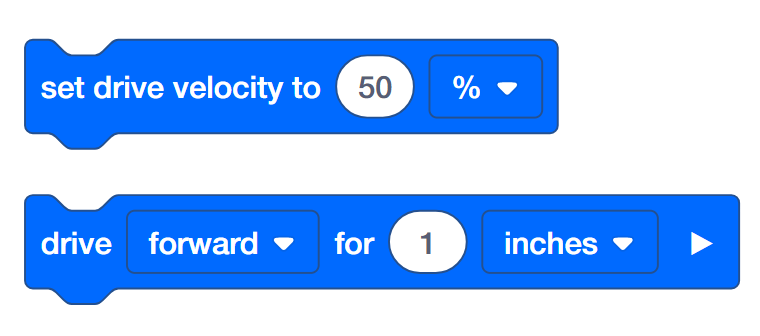
本次调查第一部分将使用的 VEXcode V5:
![]() 教师提示
教师提示
如果这是学生第一次使用 VEXcode V5,他们可以在探索过程中随时参考教程。 教程位于工具栏中。

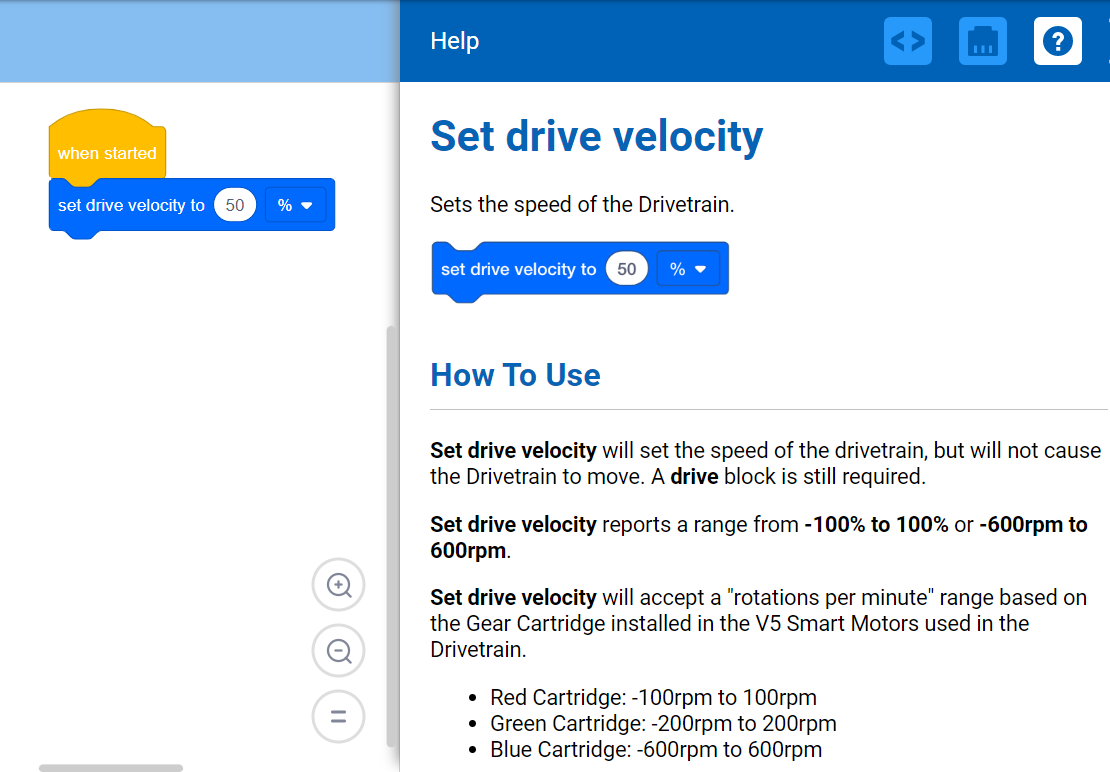
要了解有关该块的更多信息,请打开 帮助 ,然后选择您要阅读的块。
每组学生都应获得所需的硬件和小组的工程笔记本。 然后打开VEXcode V5。
| 数量 | 所需材料 |
|---|---|
| 1 |
Speedbot 机器人 |
| 1 |
充电机器人电池 |
| 1 |
VEX代码 V5 |
| 1 |
USB 电缆(如果使用电脑) |
| 1 |
工程笔记本 |
| 1 |
球(足球的大小和形状) |
| 1 |
3m x 3m 净空 |
| 1 |
米尺或尺子 |
| 1 |
胶带卷 |
| 1 |
数据表 |
![]() 教师提示
教师提示
-
对检查 Speedbot 是否准备就绪的每个步骤进行建模,以便学生养成这样做的习惯。
步骤 2: 开始新项目
在开始项目之前,请选择 Speedbot(传动系统 2 个电机,无陀螺仪)-模板项目。 模板项目包含 Speedbot 的电机配置。 如果不使用模板,您的机器人将无法正确运行项目。

-
打开文件菜单。
-
选择 打开 示例.
-
选择并打开 Speedbot(传动系统 2 电机,无陀螺仪)模板项目。
-
将您的项目重命名为 Drive Velocity 因为我们将使用 [Set drive velocity] 块。
-
保存您的项目。
-
有关保存项目的帮助,请查看 VEXcode V5 中的教程。

-
-
检查确保项目名称 Drive Velocity 现在位于工具栏中心的窗口中。

![]() 教师提示
教师提示
-
确保学生选择了 Speedbot(传动系统 2 电机,无陀螺仪)模板项目。
-
您可以向学生指出, 示例 页面上有几个模板可供选择。 当他们建造和使用其他机器人时,他们将有机会使用不同的模板。
![]() 教师工具箱
教师工具箱

-
保存项目
指出,当他们第一次打开 VEXcode V5 时,窗口被标记为 VEXcode 项目 并且未保存(在工具栏上指示)。 VEXcode Project 是 VEXcode V5 首次打开时的默认项目名称。 一旦项目重命名为 Drive Velocity 并保存,显示就会更新为“已保存”。 使用工具栏中的此窗口,可以轻松检查学生是否使用了正确的项目以及是否已保存。一旦项目首次保存,VEXcode V5 会自动保存任何后续更改,如项目名称旁边的消息所示。
告诉学生他们现在已经准备好开始他们的第一个项目了。 向学生解释,通过遵循几个简单的步骤,他们将能够创建并运行一个可以设置 Speedbot 传动系统速度的项目。
-
停止并讨论
这是一个很好的暂停点,让学生单独或分组回顾一下刚刚完成的在 VEXcode V5 中启动新项目的步骤。 要求学生先进行个人反思,然后再在小组内或全班同学分享。
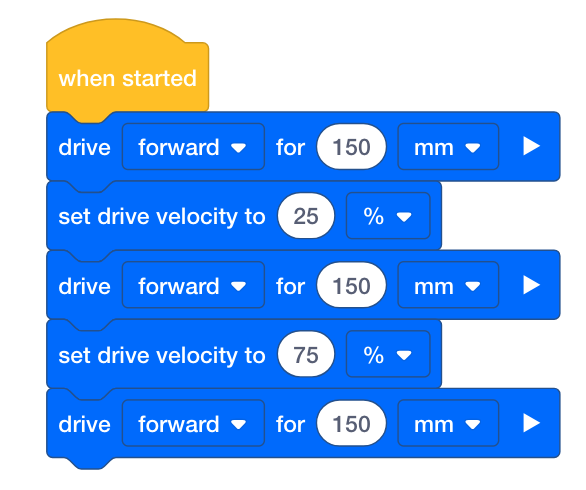
步骤 3: 以不同速度向前行驶 450 毫米
-
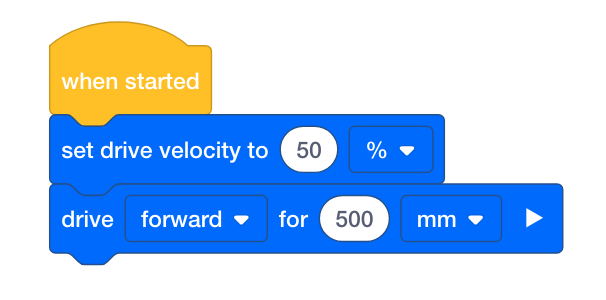
在 VEXcode V5 中构建该项目。
![]() 教师工具箱
教师工具箱
请注意,在此堆栈中,第二和第三个块与第四和第五个块相同。 添加第三个块后,学生可以右键单击或长按第二个块并选择复制来添加第四个和第五个块。 然后第四个块的速度可以改为75%。

-
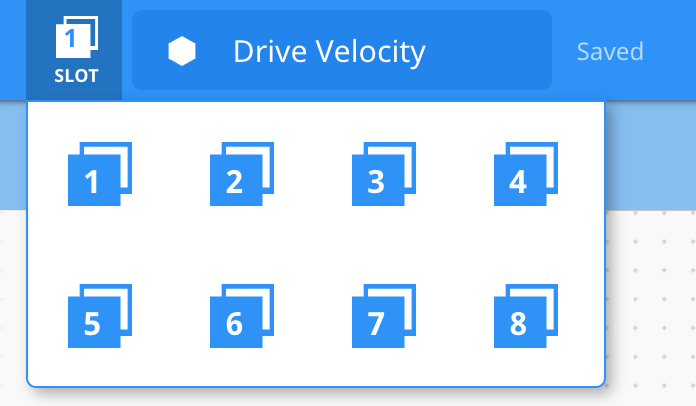
选择插槽图标。 您可以将项目下载到机器人大脑中的八个可用插槽之一。 选择插槽 1。
-
将机器人连接到您的计算机或平板电脑。 一旦连接成功,工具栏中的 Brain 图标就会变为绿色。

-
然后点击工具栏上的下载按钮,将 Drive Velocity 项目下载到机器人大脑。
-
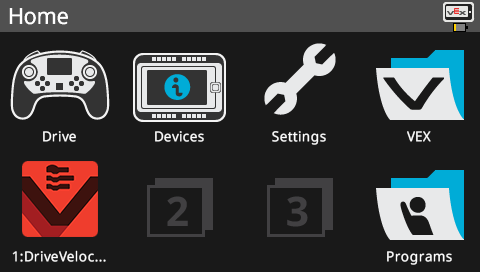
通过查看机器人大脑的屏幕,检查以确保您的项目已下载到 Speedbot 的大脑。 项目名称应列在插槽 1 中。
-
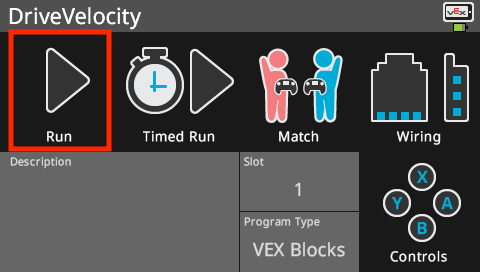
通过选择项目然后按运行,在 Speedbot 机器人上运行该项目。
![]() 教师工具箱
教师工具箱
-
停下来讨论
让学生预测当这个项目下载并在 Speedbot 机器人上运行时会发生什么。 告诉学生将他们的预测记录在他们的工程笔记本中。 如果时间允许,让每个小组分享他们的预测。学生应该预测 Speedbot 将首先以其默认速度(50%)向前移动,然后比默认速度慢(25%),然后比默认速度快(75%)。
-
选择先示范
示范在全班同学面前运行该项目,然后让所有学生同时尝试。 将学生聚集在一个区域,并留出足够的空间让 Speedbot 移动 450 毫米(如果放在地板上)。告诉学生现在轮到他们运行他们的项目了。 确保它们有一条畅通的道路并且没有机器人会互相碰撞。

![]() 教师工具箱
-
完成第 4 步
教师工具箱
-
完成第 4 步
-
无需再次保存项目,因为 VEXcode V5 将自动保存。
-
要将 [Drive for] 块从 前进 更改为 后退,只需单击下拉菜单并选择 后退。
-
如果学生正在使用计算机,请他们断开机器人大脑上的 USB 电缆。 在运行项目时将机器人连接到计算机可能会导致机器人拉动连接线。
-
因为我们没有选择新的插槽,所以新项目将下载至插槽 1 并替换之前的项目。
![]() 教师提示
教师提示
如果有必要,要求各队共享测试区域和球,但也可以设置多个测试区域,每个区域都有自己的球。 决定您是否要设置测试区域或希望学生这样做。
步骤5:设置测试区域

测试区域布局示例
-
使用胶带和米尺在地板上画一条 3 米长的线,如上图所示的水平线。
-
画完线后,再次使用胶带和米尺在 3 米线上画出 1 米长的线,就像上图中的垂直线一样。 从 0 厘米处开始,在垂直线上每隔 50 厘米用胶带贴一条 1 米长的线。
-
较短的水平线应位于较长的垂直线的中心。
-
-
在设置区域时,团队中的一到两名成员应创建一个名为 Momentum的新项目。 将速度设置为 50%,并让 Speedbot 向前行驶到 50 厘米处的第一条线。 请记住 1 厘米 = 10 毫米,因此机器人将向前移动 50 厘米或 500 毫米。
![]() 教师工具箱
-
为什么开展此项活动?
教师工具箱
-
为什么开展此项活动?
数据收集和分析,甚至简单的模式识别,都是基本的科学技能。 此活动通过防止常见的失误为数据分析添加了结构 请注意,说明并没有告诉学生改变机器人的行驶距离以及改变机器人的速度。 这是学习科学家所说的“变量控制策略”的有意应用。 教导新手调查员一次操纵一个变量(即本例中的速度)来确定其对第二个变量(即球在碰撞后行进的距离)的影响很重要,因为这不一定是学生会自发采用的方法,而不是猜测和检查的方法。 典型的猜测和检查方法通常一次操纵多个变量(即改变机器人行进的速度和距离)并观察汇合对球旋转后行进距离的影响。 这项活动试图引导学生远离这种情况,因为变量之间的关系变得模糊不清。 是机器人的速度越快,还是机器人行驶的距离越远,还是两者兼而有之,导致球飞得更远? 当我们同时操纵两个变量时,我们无法回答这个问题。
然而,团队可能会自发尝试驾驶机器人行驶不同的距离。 如果您观察到这种情况,请要求他们仅改变距离,但保持速度与原始 500 毫米距离的试验中相同。 这样,他们可以比较相同的速度和不同的行驶距离,看看机器人的行驶距离是否也影响球的行进距离。
步骤 6: 测试碰撞过程中的能量转移


将球放置在距离水平线 50 厘米处的中心,并将机器人的前端放置在距离水平线 0 厘米处的中心。 确保机器人的正面朝向球的方向。 运行您的第一个 Momentum 项目,将速度设置为 50%,并密切关注机器人与球的碰撞。
将设定的速度、行驶距离以及球行进的距离记录在此数据表 (Google / .pdf) 中。 表格的第一行已经根据您在上一步中处理的 Momentum 项目为您启动。 当您尝试设置不同的速度时,继续向该表添加数据。 然后,您可以在全班讨论您的发现时添加其他团队的数据。

收集数据时,请在工程笔记本中思考并回答以下问题:
-
如何判断机器人的动量在碰撞过程中将能量传递给了球? 详细解释一下。
-
至少再重复测试两次。 尝试小于 50% 的速度。 将球放回原位,并在表中记录球行进的距离。 另外,尝试超过 50% 的速度。 将球放回原位,并在表中记录球行进的距离。
-
当所有小组都完成三项测试后,讨论其他小组选择的速度以及球在测试中行进的距离。 当团队共享他们的数据时,将他们的发现添加到您的表中。
-
在数据中寻找模式。 随着设定速度的增加,球行进的距离会增加还是减少?
![]() 教师工具箱
-
答案
教师工具箱
-
答案
-
球的运动证明机器人在碰撞过程中转移了能量。 学生还可能描述球在撞击后的速度或行进方向作为证据。
-
球行进的距离取决于所用球的质量/重量和机器人设定的速度。
-
学生们应该认识到,速度越高,球飞得越远。 明确地将其与机器人的动量联系起来。 强调机器人的重量没有改变,只有速度改变,但两者都对机器人的动量有贡献。 询问他们是否认为如果机器人更重的话球会飞得更远。 大概如此。 下一次阅读将更多地讨论碰撞过程中球的质量的影响。
-
学生小组可能选择了变化范围很广的速度,但总体学习目标是让学生认识到,速度越高,动量越大,碰撞时会将更多的能量传递给球。