
ബ്ലോക്കുകൾ അടിസ്ഥാനമാക്കിയുള്ള പര്യവേക്ഷണ വേഗത
![]() ടീച്ചർ ടൂൾബോക്സ്
ടീച്ചർ ടൂൾബോക്സ്
-
പ്രവർത്തന രൂപരേഖ
ഈ പര്യവേഷണം ആദ്യം വിദ്യാർത്ഥികളെ ഡ്രൈവിംഗിനുള്ള വേഗത ക്രമീകരിക്കുന്നതിന് പരിചയപ്പെടുത്തുകയും പിന്നീട് റോബോട്ടിന്റെ വേഗത അതിന്റെ ആക്കം എങ്ങനെ ബാധിക്കുന്നുവെന്ന് പര്യവേക്ഷണം ചെയ്യാൻ ആവശ്യപ്പെടുകയും ചെയ്യും. ഈ പ്രവർത്തനത്തിന്റെ രൂപരേഖയ്ക്കായി ഇവിടെ (Google / .docx / .pdf) ക്ലിക്ക് ചെയ്യുക. സ്ട്രൈക്ക് ചലഞ്ച് ബൗളിംഗ് ഗെയിമിൽ പ്രയോഗിക്കേണ്ട ഒരു പ്രധാന ആശയമായിരിക്കും റോബോട്ടിന്റെ ആക്കം മനസ്സിലാക്കൽ. -
വിദ്യാർത്ഥികൾ എന്താണ് പ്രോഗ്രാം ചെയ്യുന്നത്
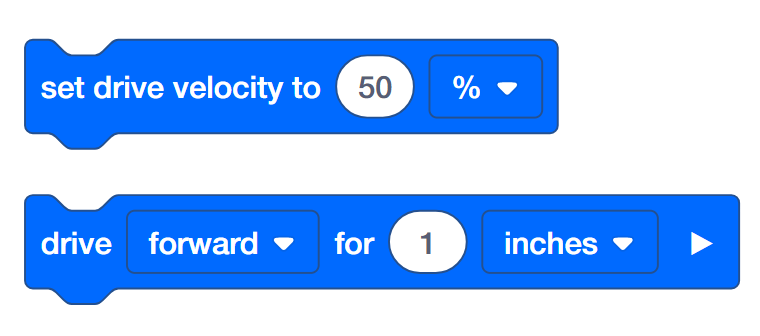
സ്പീഡ്ബോട്ട് (ഡ്രൈവ്ട്രെയിൻ 2-മോട്ടോറുകൾ, ഗൈറോ ഇല്ല) ടെംപ്ലേറ്റ് പ്രോജക്റ്റ് ഉപയോഗിക്കുന്നത് [ഡ്രൈവ് ഫോർ] ബ്ലോക്കിന്റെ വേഗത ക്രമീകരണങ്ങൾ മാറ്റാൻ വിദ്യാർത്ഥികളെ അനുവദിക്കുന്നു, ഒരു സ്റ്റാക്കിലേക്ക് [ഡ്രൈവ് വേഗത സജ്ജമാക്കുക] ബ്ലോക്ക് ചേർത്തുകൊണ്ട്. പ്രവർത്തനത്തിന്റെ ഗൈഡഡ് ഭാഗത്ത് വിദ്യാർത്ഥികൾക്ക് [ഡ്രൈവ് പ്രവേഗം സജ്ജമാക്കുക] ബ്ലോക്കിൽ പ്രവർത്തിക്കാൻ നിർദ്ദേശം നൽകുന്നു, പ്രവർത്തനത്തിന്റെ അവസാനം ആക്കം, ഊർജ്ജ കൈമാറ്റം എന്നിവയുടെ പരീക്ഷണങ്ങളിൽ പ്രവേഗ പ്രോഗ്രാമിംഗിലെ അവരുടെ കഴിവുകൾ പ്രയോഗിക്കാൻ അവരോട് ആവശ്യപ്പെടുന്നു.
വ്യത്യസ്ത വേഗതയിൽ ഓടിക്കാൻ സ്പീഡ്ബോട്ട് തയ്യാറാണ്!
ചുമതലയ്ക്ക് ഏറ്റവും അനുയോജ്യമായ വേഗതയിൽ ഡ്രൈവ് ചെയ്യുന്നതിനായി സ്പീഡ്ബോട്ടിനെ പ്രോഗ്രാം ചെയ്യുന്നതിനെക്കുറിച്ച് കൂടുതലറിയാൻ ഈ അന്വേഷണം നിങ്ങളെ സഹായിക്കും. അവസാനം സ്ട്രൈക്ക് ചലഞ്ചിൽ, സ്പീഡ്ബോട്ടിന് വേഗത കൈവരിക്കാനും മികച്ച ആക്കം നൽകാനും എന്നാൽ നല്ല കോണിലും മികച്ച ശക്തിയിലും പന്ത് അടിക്കുന്നതിന് നിയന്ത്രണത്തിൽ തുടരാനും അനുവദിക്കുന്ന ഒരു പ്രവേഗം നിങ്ങൾ കണ്ടെത്തേണ്ടതുണ്ട്.
VEXcode V5 ഈ അന്വേഷണത്തിന്റെ ആദ്യ ഭാഗത്ത് ഉപയോഗിക്കും:
 (A)
(A)
![]() അധ്യാപക നുറുങ്ങുകൾ
അധ്യാപക നുറുങ്ങുകൾ
വിദ്യാർത്ഥി ആദ്യമായി VEXcode V5 ഉപയോഗിക്കുകയാണെങ്കിൽ, ഈ പര്യവേക്ഷണ വേളയിൽ ഏത് സമയത്തും അവർക്ക് ട്യൂട്ടോറിയലുകൾ റഫർ ചെയ്യാൻ കഴിയും. ട്യൂട്ടോറിയലുകൾ ടൂൾബാറിലാണ് സ്ഥിതി ചെയ്യുന്നത്.

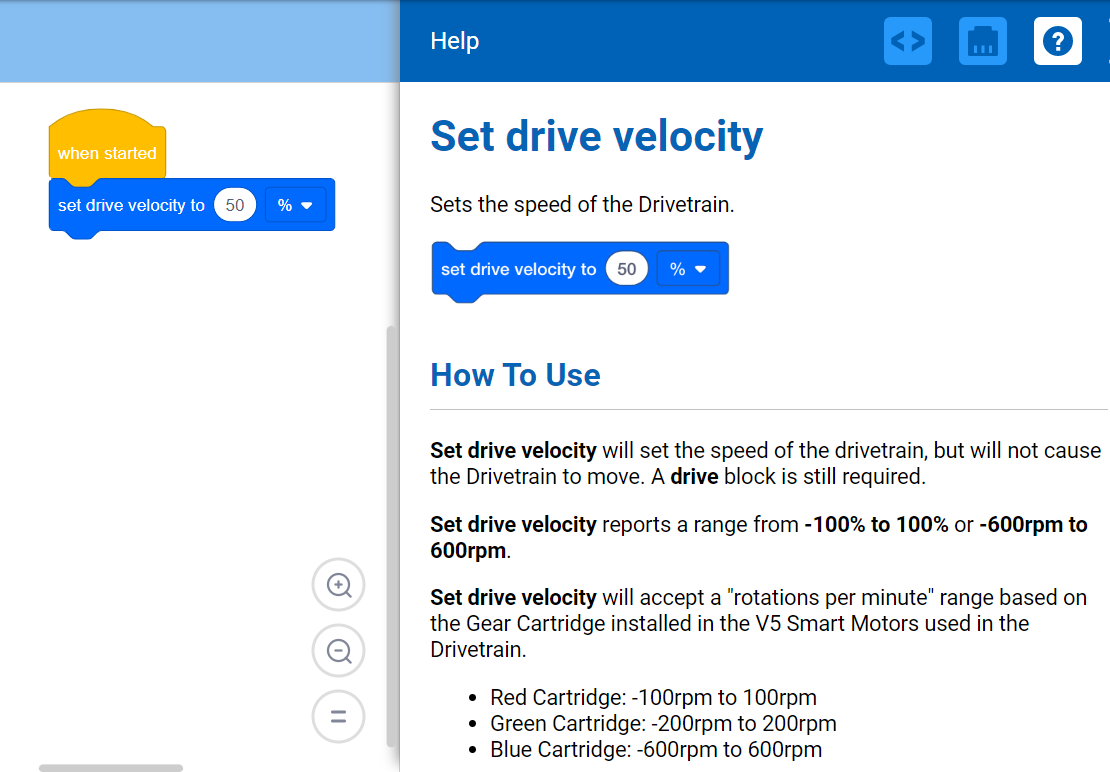
ബ്ലോക്കിനെക്കുറിച്ചുള്ള കൂടുതൽ വിവരങ്ങൾ കണ്ടെത്താൻ,ഹെൽപ്പ്തുറന്ന് നിങ്ങൾക്ക് വായിക്കാൻ ആഗ്രഹിക്കുന്ന ബ്ലോക്ക് തിരഞ്ഞെടുക്കുക.
ഓരോ വിദ്യാർത്ഥി ഗ്രൂപ്പിനും ആവശ്യമായ ഹാർഡ്വെയറും ഗ്രൂപ്പിന്റെ എഞ്ചിനീയറിംഗ് നോട്ട്ബുക്കും ലഭിക്കണം. തുടർന്ന് VEXcode V5 തുറക്കുക.
| അളവ് | ആവശ്യമായ വസ്തുക്കൾ |
|---|---|
| 1 |
സ്പീഡ്ബോട്ട് റോബോട്ട് |
| 1 |
ചാർജ്ജ് ചെയ്ത റോബോട്ട് ബാറ്ററി |
| 1 |
VEXcode V5 |
| 1 |
യുഎസ്ബി കേബിൾ (കമ്പ്യൂട്ടർ ഉപയോഗിക്കുകയാണെങ്കിൽ) |
| 1 |
എഞ്ചിനീയറിംഗ് നോട്ട്ബുക്ക് |
| 1 |
പന്ത് (ഒരു ഫുട്ബോൾ പന്തിന്റെ വലിപ്പവും ആകൃതിയും) |
| 1 |
3 മീറ്റർ x 3 മീറ്റർ ശൂന്യമായ ഇടം |
| 1 |
മീറ്റർ സ്റ്റിക്ക് അല്ലെങ്കിൽ റൂളർ |
| 1 |
ടേപ്പ് റോൾ |
| 1 |
ഡാറ്റ പട്ടിക |
![]() അധ്യാപക നുറുങ്ങുകൾ
അധ്യാപക നുറുങ്ങുകൾ
-
സ്പീഡ്ബോട്ട് തയ്യാറാണോ എന്ന് പരിശോധിക്കുന്നതിനുള്ള ഓരോ ഘട്ടത്തിന്റെയും മാതൃക തയ്യാറാക്കുക, അതുവഴി വിദ്യാർത്ഥികൾക്ക് അത് ശീലമാക്കാൻ കഴിയും.
ഘട്ടം 1: പര്യവേക്ഷണത്തിനുള്ള തയ്യാറെടുപ്പ്
പര്യവേക്ഷണത്തിനുള്ള തയ്യാറെടുപ്പ്
പ്രവർത്തനം ആരംഭിക്കുന്നതിന് മുമ്പ്, ഈ ഇനങ്ങൾ ഓരോന്നും നിങ്ങളുടെ കൈവശം തയ്യാറായിട്ടുണ്ടോ?
-
എല്ലാ മോട്ടോറുകളും ശരിയായ പോർട്ടുകളിൽ പ്ലഗ് ചെയ്തിട്ടുണ്ടോ?
-
എല്ലാ മോട്ടോറുകളിലും സ്മാർട്ട് കേബിളുകൾപൂർണ്ണമായുംചേർത്തിട്ടുണ്ടോ?
-
ബാറ്ററിചാർജ് ചെയ്തോ?
ഘട്ടം 2: ഒരു പുതിയ പ്രോജക്റ്റ് ആരംഭിക്കുക
നിങ്ങളുടെ പ്രോജക്റ്റ് ആരംഭിക്കുന്നതിന് മുമ്പ്, സ്പീഡ്ബോട്ട് (ഡ്രൈവ്ട്രെയിൻ 2-മോട്ടോറുകൾ, ഗൈറോ ഇല്ല) - ടെംപ്ലേറ്റ് പ്രോജക്റ്റ് തിരഞ്ഞെടുക്കുക. ടെംപ്ലേറ്റ് പ്രോജക്റ്റിൽ സ്പീഡ്ബോട്ടിന്റെ മോട്ടോർ കോൺഫിഗറേഷൻ അടങ്ങിയിരിക്കുന്നു. ടെംപ്ലേറ്റ് ഉപയോഗിക്കുന്നില്ലെങ്കിൽ, നിങ്ങളുടെ റോബോട്ട് പ്രോജക്റ്റ് ശരിയായി പ്രവർത്തിപ്പിക്കില്ല.

- ഫയൽ മെനു തുറക്കുക.
- തിരഞ്ഞെടുക്കുകതുറക്കുകഉദാഹരണങ്ങൾ.
- സ്പീഡ്ബോട്ട് (ഡ്രൈവ്ട്രെയിൻ 2-മോട്ടോറുകൾ, ഗൈറോ ഇല്ല) ടെംപ്ലേറ്റ് പ്രോജക്റ്റ്തിരഞ്ഞെടുത്ത് തുറക്കുക.
- നിങ്ങളുടെ പ്രോജക്റ്റിന്റെ പേര്ഡ്രൈവ് വെലോസിറ്റിഎന്ന് മാറ്റുക, കാരണം നമ്മൾ [ഡ്രൈവ് വെലോസിറ്റി സജ്ജമാക്കുക] ബ്ലോക്ക് ഉപയോഗിക്കും.
- നിങ്ങളുടെ പ്രോജക്റ്റ് സംരക്ഷിക്കുക.
-
ഒരു പ്രോജക്റ്റ് സേവ് ചെയ്യുന്നതിനുള്ള സഹായത്തിന്, VEXcode V5-ലെ ട്യൂട്ടോറിയലുകൾ അവലോകനം ചെയ്യുക.

-
-
ടൂൾബാറിന്റെ മധ്യത്തിലുള്ള വിൻഡോയിൽ ഇപ്പോൾ പ്രോജക്റ്റ് നാമംഡ്രൈവ് വെലോസിറ്റിഉണ്ടെന്ന് ഉറപ്പാക്കുക.

![]() അധ്യാപക നുറുങ്ങുകൾ
അധ്യാപക നുറുങ്ങുകൾ
-
വിദ്യാർത്ഥികൾ സ്പീഡ്ബോട്ട് (ഡ്രൈവ്ട്രെയിൻ 2-മോട്ടോറുകൾ, ഗൈറോ ഇല്ല) ടെംപ്ലേറ്റ് പ്രോജക്റ്റ് തിരഞ്ഞെടുത്തിട്ടുണ്ടെന്ന് ഉറപ്പാക്കുക.
-
ഉദാഹരണങ്ങൾപേജിൽ നിന്ന് തിരഞ്ഞെടുക്കാൻ നിരവധി ടെംപ്ലേറ്റുകൾ ഉണ്ടെന്ന് നിങ്ങൾക്ക് വിദ്യാർത്ഥികളെ ചൂണ്ടിക്കാണിക്കാം. അവർ മറ്റ് റോബോട്ടുകൾ നിർമ്മിക്കുകയും ഉപയോഗിക്കുകയും ചെയ്യുമ്പോൾ, അവർക്ക് വ്യത്യസ്ത ടെംപ്ലേറ്റുകൾ ഉപയോഗിക്കാനുള്ള അവസരം ലഭിക്കും.
![]() ടീച്ചർ ടൂൾബോക്സ്
ടീച്ചർ ടൂൾബോക്സ്

- സേവിംഗ് പ്രോജക്റ്റുകൾ
അവർ ആദ്യം VEXcode V5 തുറന്നപ്പോൾ, വിൻഡോVEXcode Projectഎന്ന് ലേബൽ ചെയ്തിരുന്നുവെന്നും അത് സേവ് ചെയ്തിട്ടില്ലെന്നും (ടൂൾബാറിൽ സൂചിപ്പിച്ചിരിക്കുന്നു) ചൂണ്ടിക്കാണിക്കുക. VEXcode V5 ആദ്യമായി തുറക്കുമ്പോൾ, VEXcode Project എന്നത് ഡിഫോൾട്ട് പ്രോജക്റ്റ് നാമമാണ്. പ്രോജക്റ്റ്ഡ്രൈവ് വെലോസിറ്റിഎന്ന് പുനർനാമകരണം ചെയ്ത് സേവ് ചെയ്തുകഴിഞ്ഞാൽ, ഡിസ്പ്ലേ സേവ്ഡ് ആയി അപ്ഡേറ്റ് ചെയ്യും. ടൂൾബാറിലെ ഈ വിൻഡോ ഉപയോഗിച്ച്, വിദ്യാർത്ഥികൾ ശരിയായ പ്രോജക്റ്റ് ഉപയോഗിക്കുന്നുണ്ടോ എന്നും അത് സംരക്ഷിക്കപ്പെടുന്നുവെന്നും പരിശോധിക്കുന്നത് എളുപ്പമാണ്.
ഒരു പ്രോജക്റ്റ് പ്രാരംഭമായി സേവ് ചെയ്തുകഴിഞ്ഞാൽ, പ്രോജക്റ്റ് പേരിന് അടുത്തുള്ള സന്ദേശം സൂചിപ്പിക്കുന്നത് പോലെ, തുടർന്നുള്ള എല്ലാ മാറ്റങ്ങളും VEXcode V5 ഓട്ടോസേവ് ചെയ്യുന്നു.
വിദ്യാർത്ഥികൾ ഇപ്പോൾ അവരുടെ ആദ്യ പ്രോജക്റ്റ് ആരംഭിക്കാൻ തയ്യാറാണെന്ന് അവരോട് പറയുക. കുറച്ച് ലളിതമായ ഘട്ടങ്ങൾ പാലിക്കുന്നതിലൂടെ, സ്പീഡ്ബോട്ടിന്റെ ഡ്രൈവ്ട്രെയിനിന്റെ വേഗത സജ്ജമാക്കുന്ന ഒരു പ്രോജക്റ്റ് സൃഷ്ടിക്കാനും പ്രവർത്തിപ്പിക്കാനും അവർക്ക് കഴിയുമെന്ന് വിദ്യാർത്ഥികളോട് വിശദീകരിക്കുക. - നിർത്തി ചർച്ച ചെയ്യുക
VEXcode V5-ൽ ഒരു പുതിയ പ്രോജക്റ്റ് ആരംഭിക്കുന്നതിനുള്ള ഘട്ടങ്ങൾ വ്യക്തിഗതമായോ ഗ്രൂപ്പുകളായോ വിദ്യാർത്ഥികളെക്കൊണ്ട് അവലോകനം ചെയ്യിക്കാൻ താൽക്കാലികമായി നിർത്തിവയ്ക്കാൻ ഇത് ഒരു നല്ല പോയിന്റാണ്. വിദ്യാർത്ഥികളോട് അവരുടെ ഗ്രൂപ്പിനുള്ളിലോ മുഴുവൻ ക്ലാസിലോ പങ്കുവെക്കുന്നതിന് മുമ്പ് വ്യക്തിപരമായി ചിന്തിക്കാൻ ആവശ്യപ്പെടുക.
ഘട്ടം 3: വ്യത്യസ്ത വേഗതയിൽ 450 മില്ലീമീറ്റർ മുന്നോട്ട് ഡ്രൈവ് ചെയ്യുക.
-
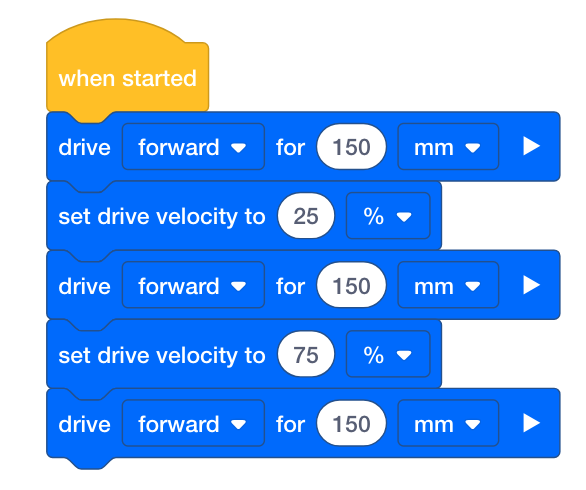
ഈ പ്രോജക്റ്റ് VEXcode V5-ൽ നിർമ്മിക്കുക.
![]() ടീച്ചർ ടൂൾബോക്സ്
ടീച്ചർ ടൂൾബോക്സ്
ഈ സ്റ്റാക്കിൽ രണ്ടാമത്തെയും മൂന്നാമത്തെയും ബ്ലോക്കുകൾ നാലാമത്തെയും അഞ്ചാമത്തെയും ബ്ലോക്കുകൾക്ക് തുല്യമാണെന്ന് ശ്രദ്ധിക്കുക. മൂന്നാമത്തെ ബ്ലോക്ക് ചേർത്തതിനുശേഷം, വിദ്യാർത്ഥിക്ക് രണ്ടാമത്തെ ബ്ലോക്കിൽ വലത്- അല്ലെങ്കിൽ ദീർഘ-ക്ലിക്കുചെയ്ത് നാലാമത്തെയും അഞ്ചാമത്തെയും ബ്ലോക്കുകൾ ചേർക്കാൻ ഡ്യൂപ്ലിക്കേറ്റ് തിരഞ്ഞെടുക്കാം. അപ്പോൾ നാലാമത്തെ ബ്ലോക്കിന്റെ പ്രവേഗം 75% ആക്കി മാറ്റാം.

-
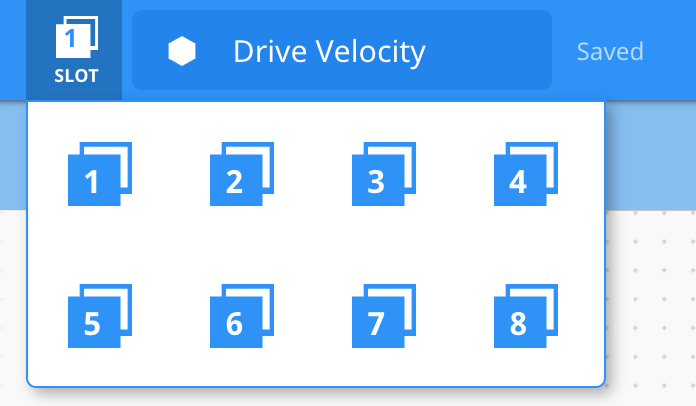
സ്ലോട്ട് ഐക്കണിൽ തിരഞ്ഞെടുക്കുക. റോബോട്ട് ബ്രെയിനിൽ ലഭ്യമായ എട്ട് സ്ലോട്ടുകളിൽ ഒന്നിലേക്ക് നിങ്ങളുടെ പ്രോജക്റ്റ് ഡൗൺലോഡ് ചെയ്യാം. സ്ലോട്ട് 1 തിരഞ്ഞെടുക്കുക.
-
റോബോട്ട് നിങ്ങളുടെ കമ്പ്യൂട്ടറിലേക്കോ ടാബ്ലെറ്റിലേക്കോ ബന്ധിപ്പിക്കുക. കണക്ഷൻ വിജയകരമായി സംഭവിച്ചുകഴിഞ്ഞാൽ, ടൂൾബാറിലെ ബ്രെയിൻ ഐക്കൺ പച്ചയായി മാറുന്നു.

-
തുടർന്ന്, റോബോട്ട് ബ്രെയിനിലേക്ക് ഡ്രൈവ് വെലോസിറ്റി പ്രോജക്റ്റ് ഡൗൺലോഡ് ചെയ്യാൻ ടൂൾബാറിലെ ഡൗൺലോഡ് ബട്ടൺ ക്ലിക്ക് ചെയ്യുക.

- റോബോട്ട് ബ്രെയിനിന്റെ സ്ക്രീൻ നോക്കി നിങ്ങളുടെ പ്രോജക്റ്റ് സ്പീഡ്ബോട്ടിന്റെ ബ്രെയിനിലേക്ക് ഡൗൺലോഡ് ചെയ്തിട്ടുണ്ടെന്ന് ഉറപ്പാക്കുക. പ്രോജക്റ്റ് പേര് സ്ലോട്ട് 1-ൽ ലിസ്റ്റ് ചെയ്തിരിക്കണം.
-
സ്പീഡ്ബോട്ട് റോബോട്ടിൽ പ്രോജക്റ്റ് തിരഞ്ഞെടുത്ത് റൺ അമർത്തി പ്രോജക്റ്റ് പ്രവർത്തിപ്പിക്കുക.

![]() ടീച്ചർ ടൂൾബോക്സ്
ടീച്ചർ ടൂൾബോക്സ്
-
നിർത്തി ചർച്ച ചെയ്യുക
ഈ പ്രോജക്റ്റ് ഡൗൺലോഡ് ചെയ്ത് സ്പീഡ്ബോട്ട് റോബോട്ടിൽ പ്രവർത്തിപ്പിക്കുമ്പോൾ എന്ത് സംഭവിക്കുമെന്ന് വിദ്യാർത്ഥികൾക്ക് പ്രവചിക്കാൻ ആവശ്യപ്പെടുക. വിദ്യാർത്ഥികളോട് അവരുടെ എഞ്ചിനീയറിംഗ് നോട്ട്ബുക്കുകളിൽ അവരുടെ പ്രവചനങ്ങൾ രേഖപ്പെടുത്താൻ പറയുക. സമയം അനുവദിക്കുമെങ്കിൽ, ഓരോ ഗ്രൂപ്പിനോടും അവരുടെ പ്രവചനം പങ്കിടാൻ ആവശ്യപ്പെടുക.സ്പീഡ്ബോട്ട് ആദ്യം അതിന്റെ ഡിഫോൾട്ട് പ്രവേഗത്തിൽ (50%) മുന്നോട്ട് നീങ്ങുമെന്നും പിന്നീട് ഡിഫോൾട്ട് പ്രവേഗത്തേക്കാൾ പതുക്കെ (25%) നീങ്ങുമെന്നും പിന്നീട് ഡിഫോൾട്ട് പ്രവേഗത്തേക്കാൾ വേഗത്തിൽ (75%) നീങ്ങുമെന്നും വിദ്യാർത്ഥികൾ പ്രവചിക്കണം.
-
മോഡൽ ചെയ്യാനുള്ള ഓപ്ഷൻ ആദ്യം
എല്ലാ വിദ്യാർത്ഥികളെയും ഒരേസമയം പരീക്ഷിക്കുന്നതിന് മുമ്പ് ക്ലാസ്സിന് മുന്നിൽ പ്രോജക്റ്റ് നടത്തുന്ന മോഡൽ. വിദ്യാർത്ഥികളെ ഒരു സ്ഥലത്ത് ഒരുമിച്ചുകൂട്ടുക, തറയിൽ വച്ചാൽ സ്പീഡ്ബോട്ടിന് 450 മില്ലിമീറ്റർ നീങ്ങാൻ ആവശ്യമായ ഇടം നൽകുക.വിദ്യാർത്ഥികളോട് പറയുക, ഇനി അവരുടെ പ്രോജക്റ്റ് നടത്താനുള്ള ഊഴമാണ്. അവയ്ക്ക് വ്യക്തമായ പാതയുണ്ടെന്നും ഒരു റോബോട്ടും പരസ്പരം കൂട്ടിയിടിക്കുന്നില്ലെന്നും ഉറപ്പാക്കുക.
ഘട്ടം 4: വ്യത്യസ്ത വേഗതയിൽ മുന്നോട്ടും പിന്നോട്ടും ഡ്രൈവ് ചെയ്യുക

- ബ്ലോക്കിനുള്ള രണ്ടാമത്തെ ഡ്രൈവ് മുന്നോട്ട് പോകുന്നതിനു പകരം പിന്നിലേക്ക് മാറുന്ന തരത്തിൽ മാറ്റുക.
- പിന്നെ പ്രോജക്റ്റ്ഡൗൺലോഡ്.
- സ്പീഡ്ബോട്ട് റോബോട്ടിൽ പ്രോജക്റ്റ് പ്രവർത്തിപ്പിക്കുക.
![]() ടീച്ചർ ടൂൾബോക്സ്
-
ഘട്ടം 4 പൂർത്തിയാക്കുന്നു
ടീച്ചർ ടൂൾബോക്സ്
-
ഘട്ടം 4 പൂർത്തിയാക്കുന്നു
-
VEXcode V5 ഓട്ടോസേവ് ചെയ്യുന്നതിനാൽ പ്രോജക്റ്റ് വീണ്ടും സേവ് ചെയ്യേണ്ട ആവശ്യമില്ല.
-
[Drive for] ബ്ലോക്ക്ഫോർവേഡ്ൽ നിന്ന്റിവേഴ്സ്ആക്കി മാറ്റാൻ, ഡ്രോപ്പ്ഡൗൺ മെനുവിൽ ക്ലിക്ക് ചെയ്ത്റിവേഴ്സ്തിരഞ്ഞെടുക്കുക.
-
വിദ്യാർത്ഥികൾ കമ്പ്യൂട്ടർ ഉപയോഗിക്കുകയാണെങ്കിൽ, റോബോട്ട് ബ്രെയിനിൽ നിന്ന് യുഎസ്ബി കേബിൾ വിച്ഛേദിക്കാൻ അവരോട് ആവശ്യപ്പെടുക. ഒരു പ്രോജക്റ്റ് പ്രവർത്തിപ്പിക്കുമ്പോൾ റോബോട്ട് ഒരു കമ്പ്യൂട്ടറുമായി ബന്ധിപ്പിച്ചിരിക്കുന്നത് റോബോട്ട് കണക്ഷൻ കേബിളിൽ വലിക്കാൻ ഇടയാക്കും.
-
ഞങ്ങൾ ഒരു പുതിയ സ്ലോട്ട് തിരഞ്ഞെടുക്കാത്തതിനാൽ, പുതിയ പ്രോജക്റ്റ് സ്ലോട്ട് 1 ലേക്ക് ഡൗൺലോഡ് ചെയ്യുകയും മുമ്പത്തെ പ്രോജക്റ്റ് മാറ്റിസ്ഥാപിക്കുകയും ചെയ്യും.
![]() അധ്യാപക നുറുങ്ങുകൾ
അധ്യാപക നുറുങ്ങുകൾ
ആവശ്യമെങ്കിൽ ടെസ്റ്റിംഗ് ഏരിയയും ബോളും പങ്കിടാൻ ടീമുകളോട് ആവശ്യപ്പെടുക, എന്നാൽ സ്വന്തം ബോൾ ഉള്ള ഒന്നിലധികം ടെസ്റ്റിംഗ് ഏരിയകളും സജ്ജീകരിക്കാവുന്നതാണ്. പരീക്ഷാ മേഖല(കൾ) സജ്ജീകരിക്കണോ അതോ വിദ്യാർത്ഥികൾ അങ്ങനെ ചെയ്യണോ എന്ന് തീരുമാനിക്കുക.
ഘട്ടം 5: നിങ്ങളുടെ പരീക്ഷണ മേഖല സജ്ജീകരിക്കുന്നു

പരീക്ഷണ മേഖലയുടെ ലേഔട്ടിന്റെ ഉദാഹരണം
- മുകളിലുള്ള ചിത്രത്തിൽ കാണിച്ചിരിക്കുന്നതുപോലെ തറയിൽ 3 മീറ്റർ ലൈൻ സൃഷ്ടിക്കാൻ ടേപ്പും മീറ്റർ സ്റ്റിക്കും ഉപയോഗിക്കുക.
- ലൈൻ സൃഷ്ടിച്ചതിനുശേഷം, മുകളിലുള്ള ചിത്രത്തിലെ ലംബ വരകൾ പോലെ 3 മീറ്റർ വരയ്ക്ക് കുറുകെ 1 മീറ്റർ വരകൾ സൃഷ്ടിക്കാൻ ടേപ്പും മീറ്റർ സ്റ്റിക്കും ഒരിക്കൽ കൂടി ഉപയോഗിക്കുക. 0cm ൽ തുടങ്ങി ലംബ വരയിൽ ഓരോ 50cm അടയാളത്തിലും 1m രേഖ ഒട്ടിക്കുക.
- ചെറിയ തിരശ്ചീന രേഖകൾ നീളമുള്ള ലംബ രേഖയിൽ കേന്ദ്രീകരിക്കണം.
- പ്രദേശം സജ്ജീകരിക്കുമ്പോൾ, നിങ്ങളുടെ ടീമിലെ ഒന്നോ രണ്ടോ അംഗങ്ങൾ മൊമന്റംഎന്ന പേരിൽ ഒരു പുതിയ പ്രോജക്റ്റ് സൃഷ്ടിക്കണം. വേഗത 50% ആയി സജ്ജമാക്കുക, സ്പീഡ്ബോട്ട് 50 സെന്റിമീറ്ററിൽ ആദ്യ വരിയിലേക്ക് മുന്നോട്ട് കൊണ്ടുപോകുക. 1 സെ.മീ = 10 മില്ലിമീറ്റർ എന്നത് ഓർമ്മിക്കുക, അങ്ങനെ റോബോട്ട് 50 സെ.മീ അല്ലെങ്കിൽ 500 മില്ലിമീറ്റർ മുന്നോട്ട് സഞ്ചരിക്കും.

![]() ടീച്ചർ ടൂൾബോക്സ്
-
എന്തിനാണ് ഈ പ്രവർത്തനം?
ടീച്ചർ ടൂൾബോക്സ്
-
എന്തിനാണ് ഈ പ്രവർത്തനം?
ഡാറ്റ ശേഖരണവും വിശകലനവും, ലളിതമായ പാറ്റേൺ തിരിച്ചറിയൽ പോലും, അടിസ്ഥാന ശാസ്ത്ര കഴിവുകളാണ്. സാധാരണ തെറ്റുകൾ തടയുന്നതിലൂടെ ഈ പ്രവർത്തനം ആ ഡാറ്റ വിശകലനത്തിന് ഘടന ചേർക്കുന്നു. റോബോട്ടിന്റെ വേഗതയിൽ വ്യത്യാസം വരുത്തുന്നതിനൊപ്പം റോബോട്ടിന്റെ ഡ്രൈവിംഗ് ദൂരം വ്യത്യാസപ്പെടുത്താൻ നിർദ്ദേശങ്ങൾ വിദ്യാർത്ഥികളോട് പറയുന്നില്ല എന്നത് ശ്രദ്ധിക്കുക. പഠന ശാസ്ത്രജ്ഞർ വേരിയബിളുകളുടെ നിയന്ത്രണ തന്ത്രം എന്ന് വിളിക്കുന്നതിന്റെ മനഃപൂർവ്വമായ പ്രയോഗമാണിത്. ഒരു സമയം ഒരു വേരിയബിളിനെ (അതായത്, ഈ സാഹചര്യത്തിൽ പ്രവേഗം) കൈകാര്യം ചെയ്ത് രണ്ടാമത്തെ വേരിയബിളിൽ അതിന്റെ സ്വാധീനം നിർണ്ണയിക്കാൻ (അതായത്, കൂട്ടിയിടിക്ക് ശേഷം പന്ത് സഞ്ചരിക്കുന്ന ദൂരം) തുടക്കക്കാരായ അന്വേഷകരെ പഠിപ്പിക്കുന്നത് പ്രധാനമാണ്, കാരണം അത് ഊഹ-പരിശോധനാ സമീപനത്തിലൂടെ വിദ്യാർത്ഥികൾ സ്വയമേവ സ്വീകരിക്കുന്ന ഒരു സമീപനമല്ല. സാധാരണ ഊഹ-പരിശോധനാ സമീപനങ്ങൾ പലപ്പോഴും ഒരേ സമയം ഒന്നിലധികം വേരിയബിളുകളെ കൈകാര്യം ചെയ്യുന്നു (അതായത്, റോബോട്ട് സഞ്ചരിക്കുന്ന വേഗതയും ദൂരവും മാറ്റുന്നു) കൂടാതെ പന്ത് ഭ്രമണത്തിനുശേഷം സഞ്ചരിക്കുന്ന ദൂരത്തിൽ സംഗമത്തിന്റെ ആഘാതം നിരീക്ഷിക്കുകയും ചെയ്യുന്നു. ഈ പ്രവർത്തനം വിദ്യാർത്ഥികളെ അതിൽ നിന്ന് അകറ്റാൻ ശ്രമിക്കുന്നു, കാരണം വേരിയബിളുകൾ തമ്മിലുള്ള ബന്ധങ്ങൾ അവ്യക്തമാണ്. റോബോട്ടിന്റെ വേഗത കൂടുന്നതാണോ, റോബോട്ട് കൂടുതൽ ദൂരം സഞ്ചരിക്കുന്നതാണോ, അതോ രണ്ടും കൂടിയാണോ പന്തിനെ കൂടുതൽ ദൂരം സഞ്ചരിക്കാൻ പ്രേരിപ്പിക്കുന്നത്? രണ്ട് വേരിയബിളുകളും ഒരേ സമയം കൈകാര്യം ചെയ്യുമ്പോൾ നമുക്ക് അതിന് ഉത്തരം നൽകാൻ കഴിയില്ല.
എന്നിരുന്നാലും, ടീമുകൾ സ്വമേധയാ റോബോട്ടിനെ വ്യത്യസ്ത ദൂരങ്ങൾ ഓടിക്കാൻ ശ്രമിച്ചേക്കാം. ഇത് നിങ്ങൾ നിരീക്ഷിക്കുകയാണെങ്കിൽ, ദൂരം മാറ്റാൻ മാത്രം അവരോട് ആവശ്യപ്പെടുക, എന്നാൽ യഥാർത്ഥ 500mm ദൂരമുള്ള ഒരു ട്രയലിൽ ഉണ്ടായിരുന്ന വേഗത അതേപടി നിലനിർത്തുക. അതുവഴി, റോബോട്ടിന്റെ ഡ്രൈവിംഗ് ദൂരം പന്ത് എത്ര ദൂരം സഞ്ചരിക്കുന്നു എന്നതിനെ സ്വാധീനിക്കുന്നുണ്ടോ എന്ന് കാണാൻ അവർക്ക് ഒരേ വേഗതയെ വ്യത്യസ്ത ഡ്രൈവിംഗ് ദൂരങ്ങളുമായി താരതമ്യം ചെയ്യാൻ കഴിയും.
ഘട്ടം 6: കൂട്ടിയിടി സമയത്ത് ഊർജ്ജ കൈമാറ്റം പരിശോധിക്കുന്നു

![]() അധ്യാപക നുറുങ്ങുകൾ
അധ്യാപക നുറുങ്ങുകൾ
-
വ്യത്യസ്ത ദൂരങ്ങളിൽ പന്ത് വ്യത്യസ്ത ദിശകളിലേക്ക് ബൗൺസ് ചെയ്യുന്നതിനായി സ്ഥലം തയ്യാറാക്കുക. ആവശ്യാനുസരണം വാതിലുകളും/അല്ലെങ്കിൽ ജനലുകളും അടയ്ക്കുക.
-
എക്സ്പ്ലോറിംഗ് വെലോസിറ്റിക്കുള്ള പട്ടിക താഴെ നിന്ന് സംരക്ഷിക്കാം, അല്ലെങ്കിൽ വിദ്യാർത്ഥികൾക്ക് അവരുടെ എഞ്ചിനീയറിംഗ് നോട്ട്ബുക്കുകളിൽ പട്ടിക പുനഃസൃഷ്ടിക്കാം.
-
ടീം എഞ്ചിനീയറിംഗ് നോട്ട്ബുക്കുകൾ വിലയിരുത്തുന്നതിനുള്ള ഒരു റൂബ്രിക് ഇവിടെ കാണാം (Google / .docx / .pdf), വ്യക്തിഗത നോട്ട്ബുക്കുകൾ വിലയിരുത്തുന്നതിനുള്ള ഒരു റൂബ്രിക് ഇവിടെ കാണാം (Google / .docx / .pdf). ഒരു റൂബ്രിക്(കൾ) ഉപയോഗിച്ച് വിദ്യാർത്ഥികളുടെ ജോലി വിലയിരുത്താൻ നിങ്ങൾ പദ്ധതിയിടുമ്പോഴെല്ലാം, അവർ പ്രോജക്റ്റിൽ പ്രവർത്തിക്കാൻ തുടങ്ങുന്നതിനുമുമ്പ് റൂബ്രിക് അവരുമായി പങ്കിടുന്നത് ഉറപ്പാക്കുക.
പന്ത് തിരശ്ചീന രേഖയിൽ 50 സെന്റിമീറ്ററിൽ മധ്യത്തിലാക്കുക, തുടർന്ന് റോബോട്ടിന്റെ മുൻഭാഗം തിരശ്ചീന രേഖയിൽ 0 സെന്റിമീറ്ററിൽ മധ്യത്തിലാക്കുന്ന രീതിയിൽ വയ്ക്കുക. റോബോട്ടിന്റെ മുൻഭാഗം പന്തിന്റെ ദിശയിലേക്ക് അഭിമുഖീകരിക്കുന്നുണ്ടെന്ന് ഉറപ്പാക്കുക. നിങ്ങളുടെ ആദ്യത്തെ മൊമെന്റം പ്രോജക്റ്റിൽ വേഗത 50% ആയി സജ്ജീകരിച്ച് പ്രവർത്തിപ്പിക്കുക, റോബോട്ട് പന്തുമായി കൂട്ടിയിടിക്കുമ്പോൾ ശ്രദ്ധയോടെ ശ്രദ്ധിക്കുക.
ഈ ഡാറ്റാ ടേബിളിൽ (Google / .pdf) നിശ്ചയിച്ച വേഗത, ഓടിക്കുന്ന ദൂരം, പന്ത് സഞ്ചരിച്ച ദൂരം എന്നിവ രേഖപ്പെടുത്തുക. മുൻ ഘട്ടത്തിൽ നിങ്ങൾ പ്രവർത്തിച്ച മൊമന്റം പ്രോജക്റ്റിനെ അടിസ്ഥാനമാക്കി പട്ടികയുടെ ആദ്യ വരി നിങ്ങൾക്കായി ആരംഭിച്ചു. വ്യത്യസ്ത പ്രവേഗങ്ങൾ ക്രമീകരിക്കാൻ ശ്രമിക്കുമ്പോൾ ഈ പട്ടികയിലേക്ക് ഡാറ്റ ചേർക്കുന്നത് തുടരുക. നിങ്ങളുടെ കണ്ടെത്തലുകൾ ഒരു ക്ലാസായി ചർച്ച ചെയ്യുമ്പോൾ മറ്റ് ടീമുകളുടെ ഡാറ്റ ചേർക്കാൻ നിങ്ങൾക്ക് കഴിയും.

നിങ്ങളുടെ ഡാറ്റ ശേഖരിക്കുമ്പോൾ, നിങ്ങളുടെ എഞ്ചിനീയറിംഗ് നോട്ട്ബുക്കിൽ താഴെ കൊടുത്തിരിക്കുന്ന ചോദ്യങ്ങളെക്കുറിച്ച് ചിന്തിക്കുകയും അവയ്ക്ക് ഉത്തരം നൽകുകയും ചെയ്യുക:
- കൂട്ടിയിടിയുടെ സമയത്ത് റോബോട്ടിന്റെ ആക്കം പന്തിലേക്ക് ഊർജ്ജം കൈമാറിയെന്ന് നിങ്ങൾക്ക് എങ്ങനെ പറയാൻ കഴിയും? വിശദാംശങ്ങൾ സഹിതം വിശദീകരിക്കുക.
- പരിശോധന കുറഞ്ഞത് രണ്ടുതവണയെങ്കിലും ആവർത്തിക്കുക. 50% ൽ താഴെയുള്ള വേഗത പരീക്ഷിക്കുക. പന്ത് അതിന്റെ സ്ഥാനത്ത് പുനഃസജ്ജമാക്കുക, പന്ത് എത്ര ദൂരം സഞ്ചരിക്കുന്നുവെന്ന് പട്ടികയിൽ രേഖപ്പെടുത്തുക. കൂടാതെ, 50% ൽ കൂടുതൽ വേഗത പരീക്ഷിക്കുക. പന്ത് അതിന്റെ സ്ഥാനത്ത് പുനഃസജ്ജമാക്കുക, പന്ത് എത്ര ദൂരം സഞ്ചരിക്കുന്നുവെന്ന് പട്ടികയിൽ രേഖപ്പെടുത്തുക.
- എല്ലാ ഗ്രൂപ്പുകളും അവരുടെ മൂന്ന് പരീക്ഷണങ്ങൾ പൂർത്തിയാക്കിക്കഴിഞ്ഞാൽ, മറ്റ് ഗ്രൂപ്പുകൾ തിരഞ്ഞെടുത്ത വേഗതയും അവരുടെ പരീക്ഷണങ്ങളിൽ പന്ത് എത്ര ദൂരം സഞ്ചരിച്ചുവെന്നും ചർച്ച ചെയ്യുക. ടീമുകൾ അവരുടെ ഡാറ്റ പങ്കിടുമ്പോൾ, അവരുടെ കണ്ടെത്തലുകൾ നിങ്ങളുടെ പട്ടികയിൽ ചേർക്കുക.
- ഡാറ്റയിൽ പാറ്റേൺ(കൾ) തിരയുക. നിശ്ചിത വേഗത കൂടുന്നതിനനുസരിച്ച് പന്ത് സഞ്ചരിക്കുന്ന ദൂരം കൂടുകയോ കുറയുകയോ ചെയ്യുമോ?
![]() ടീച്ചർ ടൂൾബോക്സ്
-
ഉത്തരങ്ങൾ
ടീച്ചർ ടൂൾബോക്സ്
-
ഉത്തരങ്ങൾ
-
കൂട്ടിയിടി സമയത്ത് റോബോട്ട് ഊർജ്ജം കൈമാറ്റം ചെയ്തു എന്നതിന്റെ തെളിവാണ് പന്തിന്റെ ചലനം. കൂട്ടിയിടിക്കലിനു ശേഷമുള്ള പന്തിന്റെ വേഗതയോ അതിന്റെ ചലന ദിശയോ തെളിവായി വിദ്യാർത്ഥികൾക്ക് വിവരിക്കാം.
-
പന്ത് സഞ്ചരിക്കുന്ന ദൂരം ഉപയോഗിക്കുന്ന പന്തിന്റെ പിണ്ഡം/ഭാരം, റോബോട്ടിന് നിശ്ചയിച്ചിരിക്കുന്ന വേഗത എന്നിവയെ ആശ്രയിച്ചിരിക്കുന്നു.
-
കുറഞ്ഞ വേഗതയേക്കാൾ ഉയർന്ന വേഗത പന്തിനെ കൂടുതൽ ദൂരം സഞ്ചരിക്കാൻ പ്രേരിപ്പിക്കുന്നുവെന്ന് വിദ്യാർത്ഥികൾ തിരിച്ചറിയണം. ഇതിനെ റോബോട്ടിന്റെ ആക്കം വ്യക്തമായി ബന്ധിപ്പിക്കുക. റോബോട്ടിന്റെ ഭാരം മാറിയിട്ടില്ല, വേഗത മാത്രമേ മാറിയിട്ടുള്ളൂ, രണ്ടും റോബോട്ടിന്റെ ആക്കം കൂട്ടുന്നതിൽ പങ്കുവഹിക്കുന്നുണ്ടെന്ന് എടുത്തുകാണിക്കുക. റോബോട്ട് കൂടുതൽ ഭാരമുള്ളതാണെങ്കിൽ പന്ത് ഇത്രയും ദൂരം സഞ്ചരിക്കുമെന്ന് അവർ കരുതുന്നുണ്ടോ എന്ന് അവരോട് ചോദിക്കൂ. അത് ഒരുപക്ഷേ അങ്ങനെയായിരിക്കും. കൂട്ടിയിടി സമയത്ത് പന്തിന്റെ പിണ്ഡത്തിന്റെ ഫലങ്ങളെക്കുറിച്ച് അടുത്ത വായനയിൽ കൂടുതൽ ഉണ്ട്.
-
വിദ്യാർത്ഥി ഗ്രൂപ്പുകൾ വ്യാപകമായി വേരിയബിൾ പ്രവേഗങ്ങൾ തിരഞ്ഞെടുത്തിരിക്കാം, പക്ഷേ ഉയർന്ന പ്രവേഗങ്ങൾ കൂടുതൽ ആക്കം കൂട്ടുമെന്ന് വിദ്യാർത്ഥികൾ തിരിച്ചറിയുക എന്നതാണ് മൊത്തത്തിലുള്ള പഠന ലക്ഷ്യം, ഇത് കൂട്ടിയിടികളിൽ പന്തിന് കൂടുതൽ ഊർജ്ജം കൈമാറുന്നു.