
![]() Boîte à outils de l'enseignant
Boîte à outils de l'enseignant
-
Plan d'activité
Cette exploration présentera d'abord aux élèves le réglage de la vitesse de conduite, puis leur demandera d'explorer comment la vitesse du robot affecte son élan. Cliquez ici (Google / .docx / .pdf) pour le aperçu de cette activité. Comprendre l'élan du robot sera un concept important à appliquer au jeu de bowling Strike Challenge. -
Ce que les étudiants programmeront
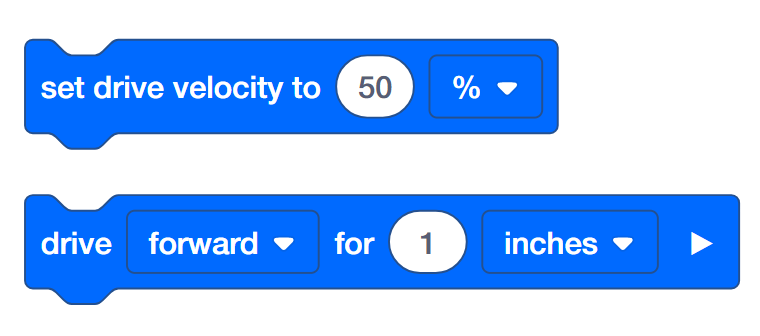
L'utilisation du projet modèle Speedbot (Drivetrain 2-motors, No Gyro) permet aux étudiants de modifier les paramètres de vitesse du bloc [Conduire pour] simplement en ajoutant un bloc [Définir la vitesse d'entraînement] à un empiler. La partie guidée de l'activité demande aux élèves de travailler avec le bloc [Définir la vitesse d'entraînement] et la fin de l'activité leur demande d'appliquer leurs compétences en matière de programmation de la vitesse à des tests de quantité de mouvement et de transfert d'énergie.
Speedbot est prêt à rouler à différentes vitesses !
Cette enquête vous aidera à en savoir plus sur la programmation du Speedbot pour qu'il conduise aux vitesses les mieux adaptées à la tâche. Dans le Strike Challenge à la fin, vous devrez trouver une vitesse pour le Speedbot qui lui permette d'être rapide et d'avoir un grand élan tout en gardant le contrôle afin de frapper la balle sous un bon angle et avec une grande force.
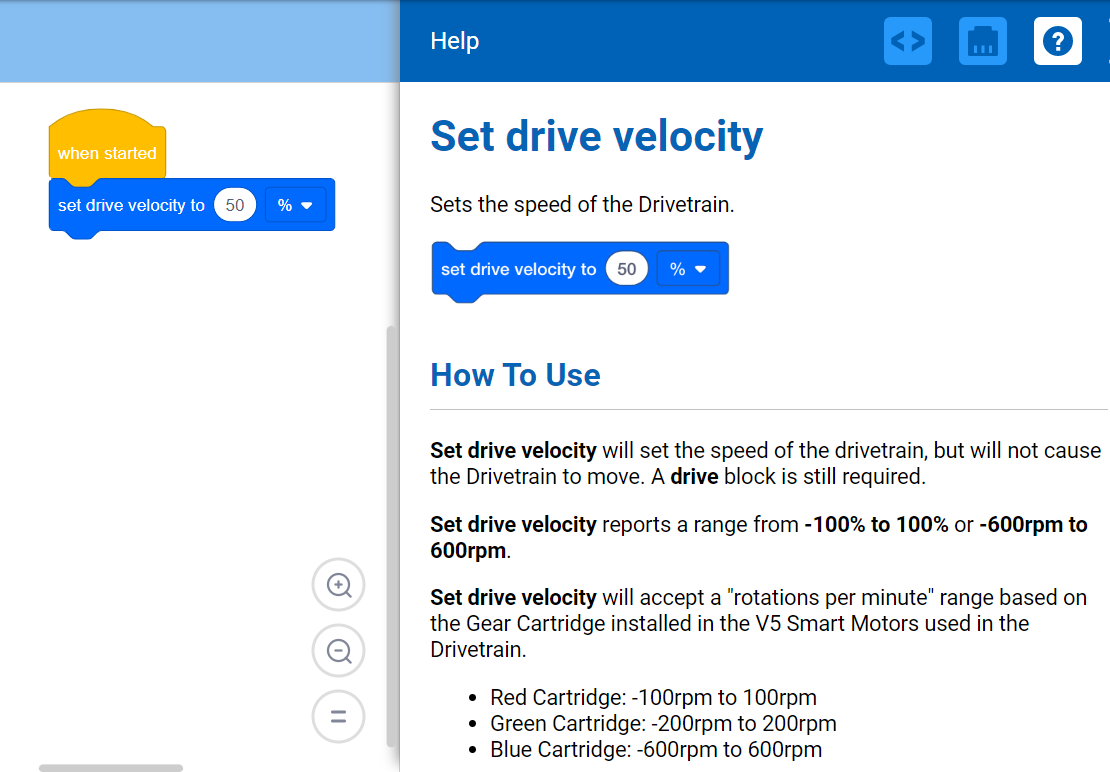
VEXcode V5 qui sera utilisé dans la première partie de cette enquête :
![]() Conseils aux enseignants
Conseils aux enseignants
Si c'est la première fois que l'étudiant utilise VEXcode V5, il peut référencer les Tutoriels à tout moment au cours de cette exploration. Les didacticiels se trouvent dans la barre d'outils.

| Quantité | Les matériaux nécessaires |
|---|---|
| 1 |
Robot robot rapide |
| 1 |
Batterie de robot chargée |
| 1 |
Code VEX V5 |
| 1 |
Câble USB (si vous utilisez un ordinateur) |
| 1 |
Cahier d'ingénierie |
| 1 |
Ballon (la taille et la forme d'un ballon de football) |
| 1 |
Espace libre de 3 mx 3 m |
| 1 |
Un mètre ou une règle |
| 1 |
Rouleau de scotch |
| 1 |
Tableau de données |
![]() Conseils aux enseignants
Conseils aux enseignants
-
Modélisez chacune des étapes permettant de vérifier que le Speedbot est prêt afin que les élèves prennent l'habitude de le faire.
Étape 1 : Préparation de l’exploration
Préparation de l'exploration
Avant de commencer l’activité, avez-vous préparé chacun de ces éléments ?
-
Tous les moteurs sont-ils branchés sur les bons ports ?
-
Les câbles intelligents sont-ils entièrement insérés dans tous les moteurs ?
-
Le Cerveau est-il allumé?
-
La batterie est-elle chargée?
Étape 2 : Démarrer un nouveau projet
Avant de commencer votre projet, sélectionnez le projet Speedbot (Drivetrain 2-motors, No Gyro) - Template. Le projet modèle contient la configuration du moteur du Speedbot. Si le modèle n'est pas utilisé, votre robot n'exécutera pas le projet correctement.

-
Ouvrez le menu Fichier.
-
Sélectionnez Ouvert Exemples.
-
Sélectionnez et ouvrez le projet de modèle Speedbot (Drivetrain 2-motors, No Gyro).
-
Renommez votre projet Drive Velocity car nous utiliserons le bloc [Set drive Velocity].
-
Enregistrez votre projet.
-
Pour obtenir de l'aide sur l'enregistrement d'un projet, consultez les didacticiels dans VEXcode V5.

-
-
Vérifiez que le nom du projet Drive Velocity est maintenant dans la fenêtre au centre de la barre d'outils.

![]() Conseils aux enseignants
Conseils aux enseignants
-
Assurez-vous que les élèves ont sélectionné le projet modèle Speedbot (Drivetrain 2-motors, No Gyro).
-
Vous pouvez indiquer aux élèves qu'il existe plusieurs modèles parmi lesquels choisir sur la page Exemples . Au fur et à mesure qu’ils construisent et utilisent d’autres robots, ils auront la possibilité d’utiliser différents modèles.
![]() Boîte à outils de l'enseignant
Boîte à outils de l'enseignant

-
Sauvegarde des projets
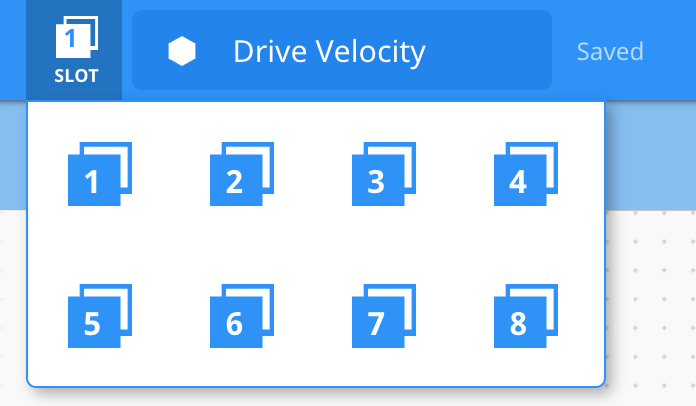
Faites remarquer que lorsqu'ils ont ouvert VEXcode V5 pour la première fois, la fenêtre était intitulée VEXcode Project et qu'elle n'a pas été enregistrée (indiquée dans la barre d'outils). VEXcode Project est le nom du projet par défaut lors de la première ouverture de VEXcode V5. Une fois le projet renommé Drive Velocity et enregistré, l'affichage se met à jour et devient Saved. Grâce à cette fenêtre de la barre d'outils, il est facile de vérifier que les étudiants utilisent le bon projet et celui-ci est enregistré.Une fois qu'un projet est initialement enregistré, VEXcode V5 enregistre automatiquement toutes les modifications ultérieures, comme indiqué par le message à côté du nom du projet.
Dites aux élèves qu’ils sont maintenant prêts à commencer leur premier projet. Expliquez aux élèves qu'en suivant quelques étapes simples, ils seront capables de créer et d'exécuter un projet qui définira la vitesse de la transmission du Speedbot.
-
Arrêtez-vous et discutez
C'est un bon moment pour faire une pause et demander aux étudiants de revoir les étapes qui viennent d'être complétées lors du démarrage d'un nouveau projet dans VEXcode V5, individuellement ou en groupe. Demandez aux élèves de réfléchir individuellement avant de partager au sein de leur groupe ou avec toute la classe.
Étape 3 : Avancez sur 450 mm à différentes vitesses
-
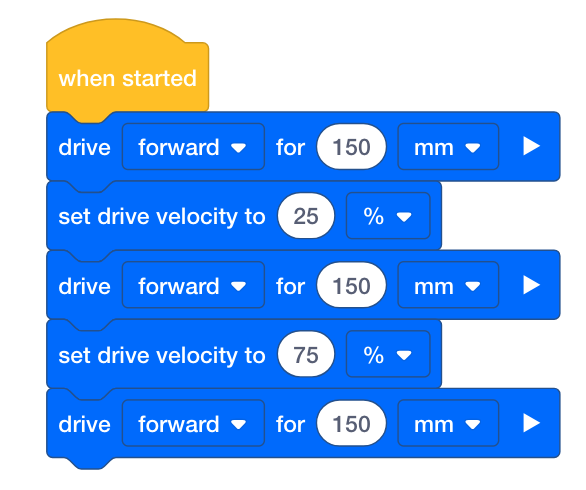
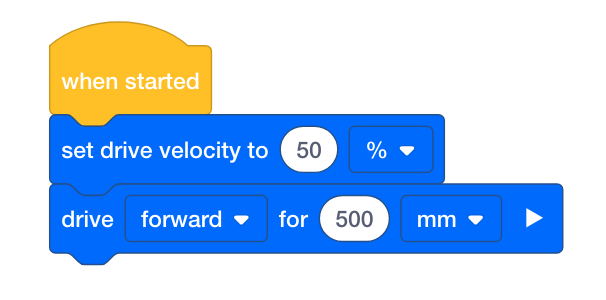
Construisez ce projet dans VEXcode V5.
![]() Boîte à outils de l'enseignant
Boîte à outils de l'enseignant
Notez que dans cette pile, les deuxième et troisième blocs sont identiques aux quatrième et cinquième blocs. Après avoir ajouté le troisième bloc, l'élève peut cliquer avec le bouton droit ou long sur le deuxième bloc et choisir Dupliquer pour ajouter les quatrième et cinquième blocs. Ensuite, la vitesse du quatrième bloc peut être modifiée à 75 %.

-
Sélectionnez sur l'icône de la fente. Vous pouvez télécharger votre projet sur l’un des huit emplacements disponibles dans Robot Brain. Sélectionnez l'emplacement 1.
-
Connectez le robot à votre ordinateur ou tablette. L'icône Cerveau dans la barre d'outils devient verte une fois qu'une connexion réussie a été établie.

-
Ensuite, cliquez sur le bouton Télécharger de la barre d'outils pour télécharger le projet Drive Velocity sur Robot Brain.
-
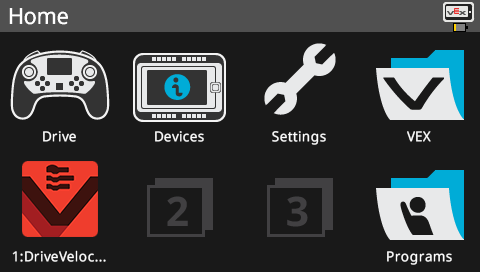
Vérifiez que votre projet a été téléchargé sur le cerveau du Speedbot en regardant l'écran du cerveau du robot. Le nom du projet doit être répertorié dans l'emplacement 1.
-
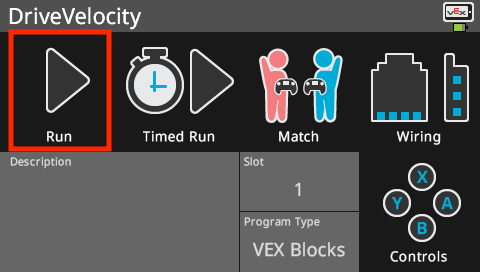
Exécutez le projet sur le robot Speedbot en sélectionnant le projet puis en appuyant sur Exécuter.
![]() Boîte à outils de l'enseignant
Boîte à outils de l'enseignant
-
Arrêtez-vous et discutez
Demandez aux élèves de prédire ce qui, selon eux, se produira lorsque ce projet sera téléchargé et exécuté sur le robot Speedbot. Dites aux étudiants d’enregistrer leurs prédictions dans leurs cahiers d’ingénierie. Si le temps le permet, demandez à chaque groupe de partager sa prédiction.Les élèves doivent prédire que le Speedbot avancera d’abord à sa vitesse par défaut (50 %), puis plus lentement (25 %) que la vitesse par défaut, puis plus vite (75 %) que la vitesse par défaut.
-
Option de modéliser en premier
Modélisez l'exécution du projet devant la classe avant de demander à tous les élèves de l'essayer en même temps. Rassemblez les élèves dans une zone et laissez suffisamment d'espace pour que le Speedbot puisse se déplacer de 450 mm s'il est posé sur le sol.Dites aux élèves que c'est maintenant à leur tour de réaliser leur projet. Assurez-vous qu'ils ont un chemin dégagé et qu'aucun robot ne se croisera.
Étape 4 : Avancez et reculez à différentes vitesses

-
Remplacez le deuxième lecteur par bloc pour conduire en marche arrière au lieu d'avancer.
-
Puis téléchargez le projet.
-
Exécutez le projet sur le robot Speedbot.
![]() Boîte à outils de l'enseignant
-
Réalisation de l'étape 4
Boîte à outils de l'enseignant
-
Réalisation de l'étape 4
-
Il n'est pas nécessaire de sauvegarder à nouveau le projet car VEXcode V5 sera automatiquement sauvegardé.
-
Pour changer le bloc [Drive for] de forward à reverse, cliquez simplement sur le menu déroulant et sélectionnez reverse.
-
Si les élèves utilisent un ordinateur, demandez-leur de débrancher le câble USB du Robot Brain. Le fait que le robot soit connecté à un ordinateur pendant l'exécution d'un projet pourrait amener le robot à tirer sur le câble de connexion.
-
Comme nous ne sélectionnons pas de nouvel emplacement, le nouveau projet sera téléchargé sur l'emplacement 1 et remplacera le projet précédent.
![]() Conseils aux enseignants
Conseils aux enseignants
Demandez aux équipes de partager la zone de test et le ballon si nécessaire, mais plusieurs zones de test, chacune avec son propre ballon, pourraient également être aménagées. Décidez si vous souhaitez aménager la ou les zones de test ou si vous souhaitez que les étudiants le fassent.
Étape 5 : Configuration de votre zone de test

Exemple de disposition de la zone de test
-
Utilisez du ruban adhésif et un mètre pour créer une ligne de 3 m sur le sol, comme la ligne horizontale montrée dans l'image ci-dessus.
-
Une fois la ligne créée, utilisez à nouveau du ruban adhésif et votre mètre pour créer des lignes de 1 m sur la ligne de 3 m, comme les lignes verticales dans l'image ci-dessus. Collez une ligne de 1 m tous les 50 cm sur la ligne verticale en commençant à 0 cm.
-
Les lignes horizontales les plus courtes doivent être centrées sur la ligne verticale la plus longue.
-
-
Pendant la création de la zone, un ou deux membres de votre équipe doivent créer un nouveau projet nommé Momentum. Réglez la vitesse à 50 % et faites avancer le Speedbot jusqu'à la première ligne à 50 cm. Gardez à l’esprit que 1 cm = 10 mm, le robot avancera donc de 50 cm ou 500 millimètres.
![]() Boîte à outils de l'enseignant
-
Pourquoi cette activité ?
Boîte à outils de l'enseignant
-
Pourquoi cette activité ?
La collecte et l’analyse de données, même la simple reconnaissance de formes, sont des compétences scientifiques fondamentales. Cette activité ajoute de la structure à cette analyse de données en évitant les faux pas courants. Notez que les instructions ne demandent pas aux élèves de faire varier la distance de conduite du robot tout en faisant varier la vitesse du robot. Il s’agit d’une application intentionnelle de ce que les scientifiques en apprentissage appellent la stratégie de contrôle des variables. Il est important d’enseigner aux enquêteurs débutants à manipuler une variable à la fois (c’est-à-dire la vitesse dans ce cas) pour déterminer son influence sur une deuxième variable (c’est-à-dire la distance parcourue par la balle après la collision), car ce n’est pas nécessairement une approche que les élèves adopteront. spontanément grâce à une approche de type « deviner et vérifier ». Les approches typiques de deviner et de vérifier manipulent souvent plus d'une variable à la fois (c'est-à-dire en modifiant à la fois la vitesse et la distance parcourue par le robot) et en observant l'impact de la confluence sur la distance parcourue par la balle après la rotation. Cette activité tente d’éloigner les élèves de cela car les relations entre les variables sont alors ambiguës. Est-ce la vitesse plus élevée du robot, la distance parcourue par le robot, ou les deux, qui amènent la balle à voyager plus loin ? Nous ne pouvons pas répondre à cette question lorsque nous manipulons les deux variables en même temps.
Cependant, les équipes peuvent spontanément essayer de conduire le robot sur différentes distances. Si vous observez cela, demandez-leur uniquement de modifier la distance mais de conserver la même vitesse que lors d'un essai avec la distance d'origine de 500 mm. De cette façon, ils peuvent comparer la même vitesse avec différentes distances de conduite pour voir si la distance de conduite du robot prend également en compte la distance parcourue par la balle.
Étape 6 : Tester le transfert d’énergie lors de collisions


![]() Conseils aux enseignants
Conseils aux enseignants
-
Préparez la zone pour que le ballon rebondisse dans différentes directions et sur différentes distances. Fermez les portes et/ou les fenêtres au besoin.
-
Le tableau d'exploration de la vitesse peut être enregistré ci-dessous, ou les étudiants peuvent recréer le tableau dans leurs cahiers d'ingénierie.
-
Une rubrique pour évaluer les cahiers d'ingénierie d'équipe peut être trouvée ici (Google / .docx / .pdf), et une rubrique pour évaluer les cahiers individuels peut être trouvée ici (Google / .docx / .). Chaque fois que vous envisagez d'évaluer le travail des étudiants avec une ou plusieurs grilles d'évaluation, assurez-vous de partager la grille d'évaluation avec eux avant qu'ils ne commencent à travailler sur le projet.
Centrez la balle sur la ligne horizontale à 50cm et placez votre robot de manière à ce que l'avant de celui-ci soit centré sur la ligne horizontale à 0cm. Assurez-vous que l'avant du robot est orienté dans la direction de la balle. Exécutez votre premier projet Momentum dont la vitesse est réglée à 50 % et soyez très attentif lorsque le robot entre en collision avec la balle.
Enregistrez la vitesse définie, la distance parcourue et la distance parcourue par la balle dans ce tableau de données (Google / .pdf). La première ligne du tableau a été créée pour vous en fonction du projet Momentum sur lequel vous avez travaillé à l'étape précédente. Continuez à ajouter des données à ce tableau pendant que vous essayez de définir différentes vitesses. Vous pouvez ensuite ajouter les données d’autres équipes tout en discutant de vos découvertes en classe.

Réfléchissez et répondez aux questions ci-dessous dans votre cahier d'ingénierie pendant que vous collectez vos données :
-
Comment pouvez-vous savoir que l’élan du robot a transféré de l’énergie à la balle lors de la collision ? Expliquez avec des détails.
-
Répétez le test au moins deux fois de plus. Essayez une vitesse inférieure à 50 %. Remettez la balle dans sa position et notez dans le tableau la distance parcourue par la balle. Essayez également une vitesse supérieure à 50 %. Remettez la balle dans sa position et notez dans le tableau la distance parcourue par la balle.
-
Lorsque tous les groupes ont terminé leurs trois tests, discutez des vitesses choisies par les autres groupes et de la distance parcourue par la balle lors de leurs tests. Pendant que les équipes partagent leurs données, ajoutez leurs résultats à votre tableau.
-
Recherchez des modèles dans les données. La distance parcourue par la balle augmente-t-elle ou diminue-t-elle à mesure que la vitesse définie augmente ?
![]() Boîte à outils de l'enseignant
-
réponses
Boîte à outils de l'enseignant
-
réponses
-
Le mouvement de la balle prouve que le robot a transféré de l'énergie lors de la collision. Les élèves pourraient également décrire la vitesse de la balle après l’impact ou sa direction de déplacement comme preuve.
-
La distance parcourue par la balle dépend de la masse/poids de la balle utilisée et de la vitesse définie pour le robot.
-
Les élèves doivent reconnaître que des vitesses plus élevées amènent la balle à voyager plus loin que des vitesses plus faibles. Reliez explicitement cela à l’élan du robot. Soulignez que le poids du robot n'a pas changé, seulement sa vitesse mais que les deux contribuent à l'élan du robot. Demandez-leur s’ils pensent que la balle irait aussi loin si le robot était plus lourd. Ce serait probablement le cas. Nous en apprendrons davantage sur les effets de la masse de la balle lors de la collision dans la lecture suivante.
-
Les groupes d'élèves peuvent avoir sélectionné des vitesses très variables, mais l'objectif d'apprentissage global est que les élèves reconnaissent que des vitesses plus élevées conduisent à un élan plus important qui transfère plus d'énergie à la balle lors des collisions.