
Hızı Keşfetmek - Blok Tabanlı
![]() Öğretmen Araç Kutusu
Öğretmen Araç Kutusu
-
Etkinlik Planı
Bu keşif, öncelikle öğrencilere sürüş için hızı ayarlamayı tanıtacak ve ardından onlardan robotun hızının momentumunu nasıl etkilediğini keşfetmelerini isteyecektir. Bu etkinliğin ana hatları için buraya (Google / .docx / .pdf) tıklayın. Robotun momentumunu anlamak, Strike Challenge bowling oyununa uygulanacak önemli bir kavram olacak. -
Öğrencilerin Programlayacağı Şeyler
Speedbot (Aktarma Organları 2 Motorlu, Jiroskop Yok) şablon projesini kullanmak, öğrencilerin [Sürüş için] bloğunun hız ayarlarını, bir yığına [Sürüş hızını ayarla] bloğu ekleyerek değiştirmelerine olanak tanır. Etkinliğin rehberli kısmında öğrenciler [Sürüş hızını ayarla] bloğuyla çalışır ve etkinliğin sonunda öğrencilerden hız programlama becerilerini momentum ve enerji transferi testlerine uygulamaları istenir.
Speedbot farklı hızlarda sürmeye hazır!
Bu araştırma, Speedbot'u görev için en uygun hızlarda sürmek üzere programlama hakkında daha fazla bilgi edinmenize yardımcı olacaktır. Sonundaki Strike Challenge'da, Speedbot'un hızlı olmasını ve büyük bir ivmeye sahip olmasını sağlayan, ancak aynı zamanda topu iyi bir açıyla ve büyük bir güçle vurabilmesi için kontrolü elinde tutan bir hız bulmanız gerekecek.
Bu araştırmanın ilk bölümünde kullanılacak olan VEXcode V5:

![]() Öğretmen İpuçları
Öğretmen İpuçları
Eğer öğrenci VEXcode V5'i ilk kez kullanıyorsa, bu keşif sırasında istediği zaman Eğitimlere başvurabilir. Eğitimler araç çubuğunda yer almaktadır.

Blok hakkında daha fazla bilgi edinmek içinYardımaçın ve ardından hakkında bilgi edinmek istediğiniz bloğu seçin.

Her öğrenci grubu gerekli donanımı ve grubun mühendislik defterini almalıdır. Ardından VEXcode V5 'i açın.
| Adet | Gerekli Malzemeler |
|---|---|
| 1 |
Speedbot Robot |
| 1 |
Şarjlı Robot Pili |
| 1 |
VEXcode V5 |
| 1 |
USB Kablosu (bilgisayar kullanıyorsanız) |
| 1 |
Mühendislik Defteri |
| 1 |
Top (bir futbol topunun boyutu ve şekli) |
| 1 |
3m x 3m boş alan |
| 1 |
Sayaç çubuğu veya Cetvel |
| 1 |
Bant rulosu |
| 1 |
Veri tablosu |
![]() Öğretmen İpuçları
Öğretmen İpuçları
-
Öğrencilerin bunu alışkanlık haline getirmeleri için Speedbot'un hazır olup olmadığını kontrol etmek için her adımı modelleyin.
Adım 1: Keşfe Hazırlık
Keşfe Hazırlık
Etkinliğe başlamadan önce, bu öğelerin her birini hazır bulunduruyor musunuz?
-
Tüm motorlar doğru bağlantı noktalarına takılı mı?
-
Akıllı kablolartam olaraktüm motorlara mı takılmış?
Adım 2: Yeni Bir Proje Başlatın
Projenize başlamadan önce Speedbot (Drivetrain 2 - motors, No Gyro) - Şablon projesini seçin. Şablon projesi Speedbot'un motor konfigürasyonunu içerir. Şablon kullanılmazsa, robotunuz projeyi doğru şekilde çalıştırmayacaktır.

- Dosya menüsünü açın.
- SeçAçÖrnekler.
- Speedbot (Aktarma Organları 2 Motorlu, Jiroskop Yok) şablon projesini seçin ve açın.
- Projenizin adınıDrive Velocityolarak değiştirin çünkü [Set drive velocity] bloğunu kullanacağız.
- Projenizi kaydedin.
-
Bir projeyi kaydetme konusunda yardım için VEXcode V5 içindeki Öğreticileri inceleyin.

-
-
Araç çubuğunun ortasındaki pencerede artık proje adıDrive Velocityolduğundan emin olun.

![]() Öğretmen İpuçları
Öğretmen İpuçları
-
Öğrencilerin Speedbot (Aktarma Organları 2 Motorlu, Jiroskop Yok) şablon projesini seçtiğinden emin olun.
-
ÖğrencilereÖrneksayfasında seçebilecekleri birkaç şablon olduğunu belirtebilirsiniz. Başka robotlar inşa edip kullandıkça farklı şablonları kullanma şansına sahip olacaklar.
![]() Öğretmen Araç Kutusu
Öğretmen Araç Kutusu

- Projeleri Kaydetme
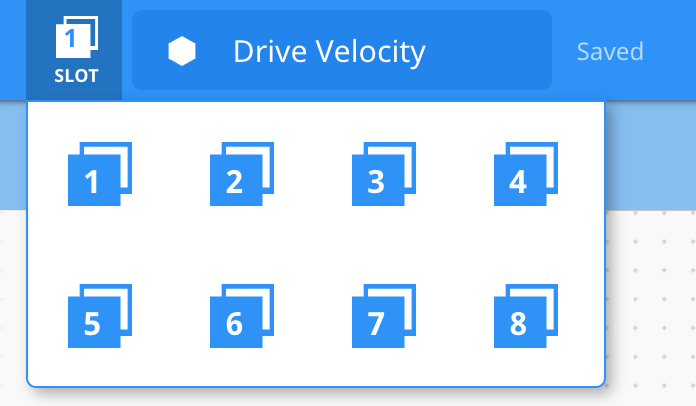
VEXcode V5'i ilk açtıklarında pencereninVEXcode Projesiolarak etiketlendiğini ve kaydedilmediğini (araç çubuğunda belirtildiği gibi) belirtin. VEXcode V5 ilk açıldığında varsayılan proje adı VEXcode Projesi'dir. ProjeDrive Velocityolarak yeniden adlandırılıp kaydedildiğinde, ekran Kaydedildi olarak güncellenir. Araç çubuğundaki bu pencereyi kullanarak, öğrencilerin doğru projeyi kullandığını ve kaydedildiğini kontrol etmek kolaydır.
Bir proje ilk kaydedildiğinde, VEXcode V5, proje adının yanındaki mesajda belirtildiği gibi, sonraki değişiklikleri otomatik olarak kaydeder.
Öğrencilere artık ilk projelerine başlamaya hazır olduklarını söyleyin. Öğrencilere, birkaç basit adımı izleyerek Speedbot'un aktarma organlarının hızını ayarlayacak bir proje oluşturabileceklerini ve çalıştırabileceklerini açıklayın. - Durun ve Tartışın
Bu, öğrencilerin VEXcode V5'te yeni bir projeye bireysel olarak veya gruplar halinde başlarken tamamladıkları adımları gözden geçirmeleri için iyi bir duraklama noktasıdır. Öğrencilerden, grup içinde veya tüm sınıfla paylaşmadan önce bireysel olarak düşünmelerini isteyin.
Adım 3: Farklı Hızlarda 450 mm İleri Sürüş
-
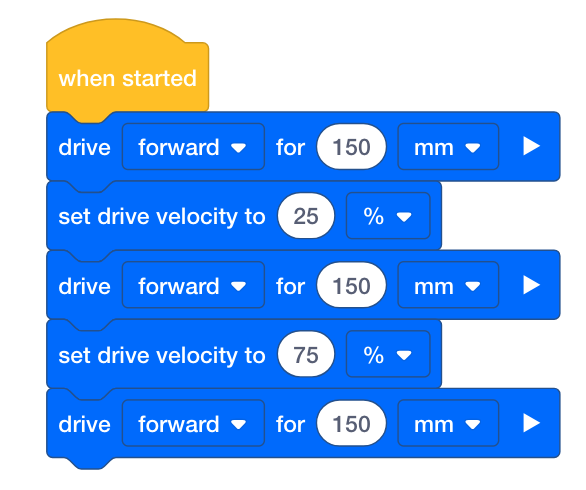
Bu projeyi VEXcode V5 'te oluşturun.
![]() Öğretmen Araç Kutusu
Öğretmen Araç Kutusu
Bu yığında ikinci ve üçüncü blokların, dördüncü ve beşinci bloklarla aynı olduğuna dikkat edin. Üçüncü bloğu ekledikten sonra öğrenci ikinci bloğa sağ veya uzun tıklayarak Çoğalt'ı seçebilir ve dördüncü ve beşinci blokları ekleyebilir. Daha sonra dördüncü bloğun hızı %75'e değiştirilebilir.

-
Slot simgesini seçin. Projenizi Robot Beynindeki mevcut sekiz yuvadan birine indirebilirsiniz. Yuva 1 'i seçin.
-
Robotu bilgisayarınıza veya tabletinize bağlayın. Başarılı bir bağlantı kurulduktan sonra araç çubuğundaki Beyin simgesi yeşile döner.

-
Ardından, Sürücü Hızı projesini Robot Beynine indirmek için araç çubuğundaki İndir düğmesine tıklayın.

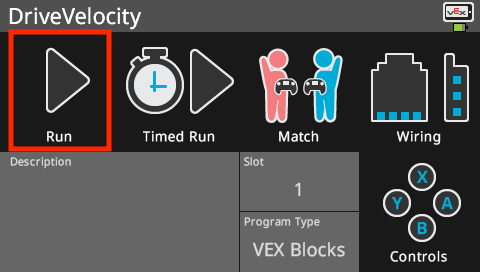
- Robot Beyninin ekranına bakarak projenizin Speedbot'un Beynine indirildiğinden emin olun. Proje adı Yuva 1 'de listelenmelidir.
-
Projeyi seçip Çalıştır'a basarak projeyi Speedbot robotunda çalıştırın.
![]() Öğretmen Araç Kutusu
Öğretmen Araç Kutusu
-
Durun ve Tartışın
Öğrencilerden, bu proje Speedbot robotuna indirildiğinde ve çalıştırıldığında ne olacağını tahmin etmelerini isteyin. Öğrencilere tahminlerini mühendislik defterlerine kaydetmelerini söyleyin. Eğer zaman kalırsa, her gruptan tahminlerini paylaşmalarını isteyin.Öğrenciler, Speedbot'un önce varsayılan hızında (%50) ilerleyeceğini, sonra varsayılan hızdan daha yavaş (%25) ve sonra varsayılan hızdan daha hızlı (%75) hareket edeceğini tahmin etmelidir.
-
Önce Modelleme Seçeneği
Tüm öğrencilerin aynı anda denemesinden önce projeyi sınıfın önünde çalıştırmayı modelleyin. Öğrencileri bir alanda toplayın ve Speedbot yere konulduğunda 450 mm hareket edebilecek kadar yer bırakın.Öğrencilere projelerini yürütme sırasının artık onlarda olduğunu söyleyin. Robotların birbirine çarpmayacağından ve yollarının açık olduğundan emin olun.
Adım 4: Farklı Hızlarda İleri ve Geri Sürüş

- İkinci sürüşü bloğun ileri yerine geri yönde sürüşü için değiştirin.
- Daha sonraindirproje.
- Projeyi Speedbot robotunda çalıştırın.
![]() Öğretmen Araç Kutusu
-
4. Adımı Tamamlama
Öğretmen Araç Kutusu
-
4. Adımı Tamamlama
-
Projeyi tekrar kaydetmenize gerek yok çünkü VEXcode V5 otomatik olarak kaydedecektir.
-
[Drive for] bloğunuilerigerideğiştirmek için, açılır menüye tıklamanız vegeriseçmeniz yeterlidir.
-
Eğer öğrenciler bilgisayar kullanıyorlarsa, Robot Beyninden USB kablosunu çıkarmalarını isteyin. Bir projeyi çalıştırırken robotun bilgisayara bağlı olması, robotun bağlantı kablosunu çekmesine neden olabilir.
-
Yeni bir slot seçmediğimiz için yeni proje Slot 1'e indirilecek ve önceki projenin yerini alacak.
![]() Öğretmen İpuçları
Öğretmen İpuçları
Gerekirse takımlardan test alanını ve topu paylaşmalarını isteyin, ancak her biri kendi topuna sahip birden fazla test alanı da kurulabilir. Test alanını kendiniz mi kurmak istiyorsunuz yoksa öğrencilerin mi kurmasını istiyorsunuz karar verin.
Adım 5: Test Alanınızı Kurma

Örnek test alanı yerleşimi
- Zeminde yukarıdaki resimde gösterilen yatay çizgi gibi 3 m'lik bir çizgi oluşturmak için bant ve bir metre çubuğu kullanın.
- Çizgi oluşturulduktan sonra, yukarıdaki resimdeki dikey çizgiler gibi 3m çizgi boyunca 1m çizgiler oluşturmak için bir kez daha bant ve ölçer çubuğunuzu kullanın. Dikey çizgi üzerinde her 50cm işaretinde 1m'lik bir çizgiyi 0cm'den başlayarak bantlayın.
- Daha kısa yatay çizgiler, daha uzun dikey çizgide ortalanmalıdır.
- Alan kurulurken, ekibinizin bir veya iki üyesi Momentum adında yeni bir proje oluşturmalıdır. Hızı % 50 'ye ayarlayın ve Speedbot'un 50 cm'de ilk çizgiye doğru ilerlemesini sağlayın. Robotun 50 cm veya 500 milimetre ilerleyebilmesi için 1 cm = 10 mm olduğunu unutmayın.

![]() Öğretmen Araç Kutusu
-
Bu etkinlik neden?
Öğretmen Araç Kutusu
-
Bu etkinlik neden?
Veri toplama ve analizi, hatta basit örüntü tanıma bile temel bilim becerileridir. Bu etkinlik, yaygın yanlış adımları önleyerek veri analizine yapı kazandırır. Talimatlarda öğrencilere robotun hızını değiştirirken sürüş mesafesini de değiştirmeleri söylenmediğine dikkat edin. Bu, öğrenen bilim insanlarının Değişkenlerin Kontrolü Stratejisi adını verdiği stratejinin kasıtlı bir uygulamasıdır. Acemi araştırmacılara, bir seferde bir değişkeni (örneğin, bu durumda hızı) manipüle ederek bunun ikinci bir değişken (örneğin, çarpışmadan sonra topun kat ettiği mesafe) üzerindeki etkisini belirlemeyi öğretmek önemlidir, çünkü bu, öğrencilerin tahmin ve kontrol yaklaşımına göre kendiliğinden benimseyecekleri bir yaklaşım değildir. Tipik tahmin ve kontrol yaklaşımları genellikle aynı anda birden fazla değişkeni (yani hem hızı hem de robotun kat ettiği mesafeyi) değiştirir ve birleşmenin, topun dönüşten sonra kat ettiği mesafe üzerindeki etkisini gözlemler. Bu etkinlik, öğrencileri bu durumdan uzaklaştırmaya çalışır çünkü değişkenler arasındaki ilişkiler bu durumda belirsizleşir. Robotun daha yüksek hızı mı, daha uzun mesafe kat etmesi mi, yoksa her ikisi de topun daha uzağa gitmesine sebep oluyor mu? Her iki değişkeni aynı anda manipüle ettiğimizde bu sorunun cevabını veremeyiz.
Ancak ekipler spontan olarak robotu farklı mesafelere sürmeyi deneyebilirler. Eğer bunu gözlemlerseniz, onlardan sadece mesafeyi değiştirmelerini ancak hızı orijinal 500mm mesafeyle yapılan denemedeki gibi tutmalarını isteyin. Bu şekilde, aynı hızı farklı sürüş mesafeleriyle karşılaştırarak robotun sürüş mesafesinin topun ne kadar uzağa gittiğinde bir etken olup olmadığını görebilirler.
Adım 6: Çarpışmalar Sırasında Enerji Transferinin Test Edilmesi
 V5 Speedbot ve top ile
V5 Speedbot ve top ile
![]() Öğretmen İpuçları
Öğretmen İpuçları
-
Topun farklı yönlerde ve farklı mesafelerde sekmesi için alanı hazırlayın. Gerektiğinde kapıları ve/veya pencereleri kapatın.
-
Hızı Keşfetme tablosu aşağıdan kaydedilebilir veya öğrenciler mühendislik defterlerinde tabloyu yeniden oluşturabilirler.
-
Takım mühendisliği not defterlerini değerlendirmek için bir değerlendirme ölçütü burada (Google / .docx / .pdf) ve bireysel not defterlerini değerlendirmek için bir değerlendirme ölçütü burada (Google / .docx / .pdf) bulunabilir. Öğrenci çalışmalarını bir veya birden fazla ölçüt ile değerlendirmeyi planladığınızda, projeye başlamadan önce ölçütü onlarla paylaştığınızdan emin olun.
Topu 50 cm'de yatay çizgi üzerinde ortalayın ve robotunuzu önü 0 cm'de yatay çizgi üzerinde ortalanacak şekilde yerleştirin. Robotun önünün topun yönüne baktığından emin olun. Hızı %50'ye ayarlanmış ilk Momentum projenizi çalıştırın ve robotun topa çarptığı anı dikkatlice izleyin.
Ayarlanan hızı, kat edilen mesafeyi ve topun kat ettiği mesafeyi bu Veri Tablosuna (Google / .pdf) kaydedin. Bir önceki adımda çalıştığınız Momentum projesine istinaden tablonun ilk satırı sizin için başlatılmıştır. Farklı hızlar ayarlamaya çalışırken bu tabloya veri eklemeye devam edin. Daha sonra bulgularınızı bir sınıf olarak tartışırken diğer ekiplerin verilerini ekleyebilirsiniz.

Verilerinizi toplarken mühendislik defterinizdeki aşağıdaki soruları düşünün ve yanıtlayın:
- Çarpışma sırasında robotun momentumunun topa enerji aktardığını nasıl söyleyebilirsiniz? Ayrıntılarıyla açıklayın.
- Testi en az iki kez daha tekrarlayın. % 50 'den daha düşük bir hız deneyin. Topu yerine sıfırlayın ve topun ne kadar uzağa gittiğini tabloya kaydedin. Ayrıca, % 50 'den fazla bir hız deneyin. Topu yerine sıfırlayın ve topun ne kadar uzağa gittiğini tabloya kaydedin.
- Tüm gruplar üç testini tamamladığında, diğer grupların seçtiği hızları ve topun testlerinde ne kadar yol kat ettiğini tartışın. Ekipler verilerini paylaşırken bulgularını tablonuza ekleyin.
- Verilerdeki örüntüleri arayın. Ayarlanan hız arttıkça topun kat ettiği mesafe artar mı yoksa azalır mı?
![]() Öğretmen Araç Kutusu
-
Cevap
Öğretmen Araç Kutusu
-
Cevap
-
Topun hareketi, robotun çarpışma sırasında enerji aktardığının kanıtıdır. Öğrenciler ayrıca topun çarpmadan sonraki hızını veya hareket yönünü de kanıt olarak tanımlayabilirler.
-
Topun kat edeceği mesafe, kullanılan topun kütlesine/ağırlığına ve robot için ayarlanan hıza bağlıdır.
-
Öğrenciler, daha yüksek hızların topun daha düşük hızlara göre daha uzağa gitmesine neden olduğunu bilmelidir. Bunu robotun momentumuna açıkça bağlayın. Robotun ağırlığının değişmediğini, sadece hızının değiştiğini, ikisinin de robotun momentumuna katkıda bulunduğunu vurgulayın. Robot daha ağır olsaydı topun bu kadar uzağa gidebileceğini düşünüp düşünmediklerini sorun. Muhtemelen öyle olurdu. Çarpışma sırasında topun kütlesinin etkileri hakkında daha fazla bilgiyi bir sonraki okumada bulabilirsiniz.
-
Öğrenci grupları çok değişken hızlar seçmiş olabilirler ancak genel öğrenme hedefi, öğrencilerin daha yüksek hızların daha büyük bir momentuma yol açtığını ve çarpışmalar sırasında topa daha fazla enerji aktardığını anlamalarıdır.