
वेग की खोज - ब्लॉक-आधारित
![]() शिक्षक टूलबॉक्स
शिक्षक टूलबॉक्स
-
गतिविधि रूपरेखा
यह अन्वेषण सबसे पहले छात्रों को ड्राइविंग के लिए वेग निर्धारित करने से परिचित कराएगा और फिर उनसे यह पता लगाने के लिए कहेगा कि रोबोट का वेग उसकी गति को कैसे प्रभावित करता है। इस गतिविधि की रूपरेखा के लिए यहां क्लिक करें (Google / .docx / .pdf)। रोबोट की गति को समझना स्ट्राइक चैलेंज बॉलिंग गेम में लागू करने के लिए एक महत्वपूर्ण अवधारणा होगी। -
छात्र क्या प्रोग्राम करेंगे
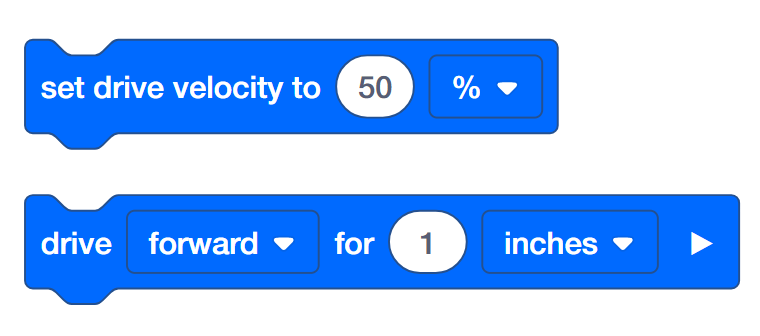
स्पीडबोट (ड्राइवट्रेन 2-मोटर्स, नो गायरो) टेम्पलेट प्रोजेक्ट का उपयोग करने से छात्रों को एक स्टैक में [ड्राइव वेलोसिटी सेट करें] ब्लॉक को जोड़कर [ड्राइव फॉर] ब्लॉक की वेलोसिटी सेटिंग्स को बदलने की अनुमति मिलती है। गतिविधि के निर्देशित भाग में छात्रों को [ड्राइव वेलोसिटी सेट करें] ब्लॉक के साथ काम करना होता है और गतिविधि के अंत में उन्हें संवेग और ऊर्जा हस्तांतरण के परीक्षणों के लिए वेग प्रोग्रामिंग के लिए अपने कौशल को लागू करने के लिए कहा जाता है।
स्पीडबोट विभिन्न वेगों पर ड्राइव करने के लिए तैयार है!
यह जांच आपको स्पीडबोट को उस गति पर चलाने के लिए प्रोग्रामिंग करने के बारे में अधिक जानने में मदद करेगी जो कार्य के लिए सबसे उपयुक्त है। अंत में स्ट्राइक चैलेंज में, आपको स्पीडबोट के लिए एक वेग खोजने की आवश्यकता होगी जो उसे तेज़ होने और महान गति प्रदान करने की अनुमति दे, लेकिन गेंद को अच्छे कोण पर और महान बल के साथ मारने के लिए नियंत्रण में रहे।
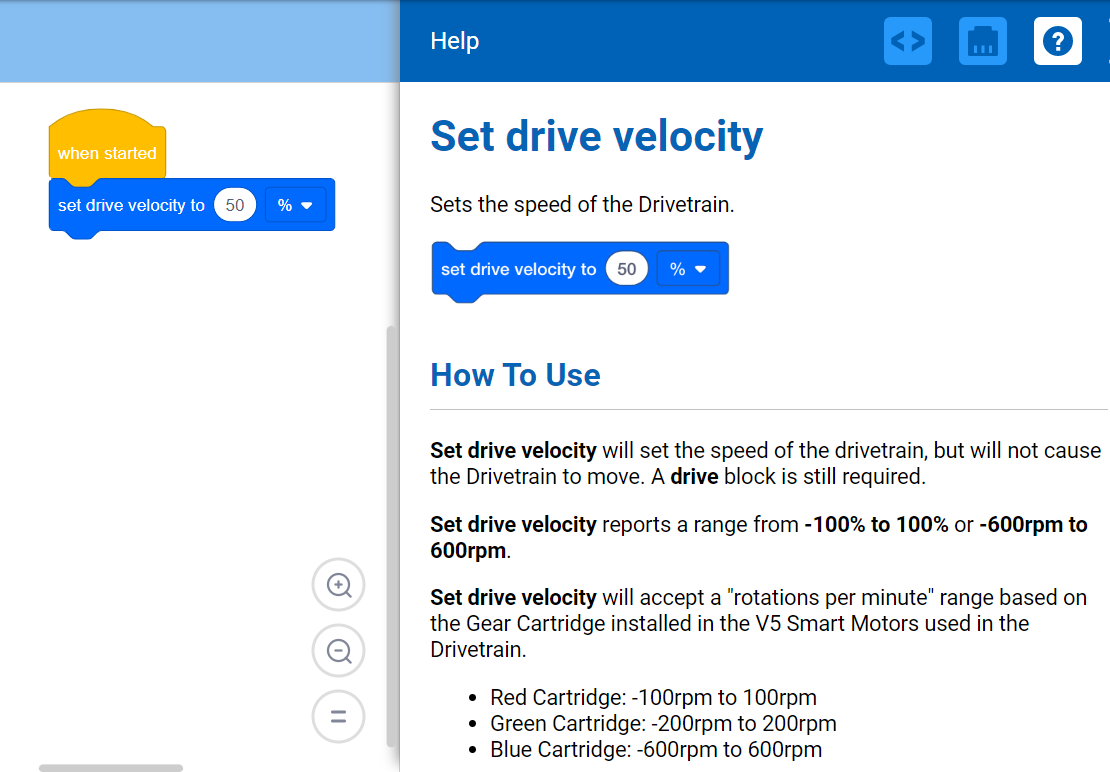
VEXcode V5 जिसका उपयोग इस जांच के पहले भाग में किया जाएगा:
![]() शिक्षक युक्तियाँ
शिक्षक युक्तियाँ
यदि छात्र पहली बार VEXcode V5 का उपयोग कर रहे हैं, तो वे इस अन्वेषण के दौरान किसी भी समय ट्यूटोरियल का संदर्भ ले सकते हैं। ट्यूटोरियल टूलबार में स्थित हैं।

ब्लॉक के बारे में अधिक जानकारी प्राप्त करने के लिए,सहायताखोलें और फिर उस ब्लॉक का चयन करें जिसके बारे में आप पढ़ना चाहते हैं।
छात्रों के प्रत्येक समूह को आवश्यक हार्डवेयर और समूह की इंजीनियरिंग नोटबुक मिलनी चाहिए। फिर VEXcode V5 खोलें.
| मात्रा | आवश्यक सामग्री |
|---|---|
| 1 |
स्पीडबॉट रोबोट |
| 1 |
चार्ज रोबोट बैटरी |
| 1 |
वेक्सकोड V5 |
| 1 |
यूएसबी केबल (यदि कंप्यूटर का उपयोग कर रहे हैं) |
| 1 |
इंजीनियरिंग नोटबुक |
| 1 |
गेंद (फुटबॉल की गेंद के आकार और आकृति की) |
| 1 |
3 मीटर x 3 मीटर खाली जगह |
| 1 |
मीटर स्टिक या रूलर |
| 1 |
टेप का रोल |
| 1 |
डेटा तालिका |
![]() शिक्षक युक्तियाँ
शिक्षक युक्तियाँ
-
स्पीडबोट तैयार है या नहीं, इसकी जांच के लिए प्रत्येक चरण का मॉडल बनाएं ताकि छात्रों को ऐसा करने की आदत हो जाए।
चरण 2: एक नई परियोजना शुरू करें
अपना प्रोजेक्ट शुरू करने से पहले, स्पीडबोट (ड्राइवट्रेन 2-मोटर्स, नो गायरो) - टेम्प्लेट प्रोजेक्ट का चयन करें। टेम्पलेट प्रोजेक्ट में स्पीडबॉट का मोटर कॉन्फ़िगरेशन शामिल है। यदि टेम्पलेट का उपयोग नहीं किया जाता है, तो आपका रोबोट प्रोजेक्ट को सही ढंग से नहीं चलाएगा।

- फ़ाइल मेनू खोलें.
- चुनेंखोलेंउदाहरण.
- स्पीडबोट (ड्राइवट्रेन 2-मोटर्स, नो गायरो) टेम्पलेट प्रोजेक्टका चयन करें और खोलें।
- अपने प्रोजेक्ट का नाम बदलकरड्राइव वेलोसिटीरखें क्योंकि हम [ड्राइव वेलोसिटी सेट करें] ब्लॉक का उपयोग करेंगे।
- अपना प्रोजेक्ट सहेजें.
-
किसी प्रोजेक्ट को सहेजने में सहायता के लिए, VEXcode V5 के अंदर ट्यूटोरियल की समीक्षा करें।

-
-
यह सुनिश्चित करने के लिए जांचें कि प्रोजेक्ट का नामड्राइव वेलोसिटीअब टूलबार के केंद्र में विंडो में है।

![]() शिक्षक युक्तियाँ
शिक्षक युक्तियाँ
-
सुनिश्चित करें कि छात्रों ने स्पीडबोट (ड्राइवट्रेन 2-मोटर्स, नो गायरो) टेम्पलेट प्रोजेक्ट का चयन किया है।
-
आप विद्यार्थियों को बता सकते हैं किउदाहरणपृष्ठ पर चयन करने के लिए कई टेम्पलेट्स हैं। जैसे-जैसे वे अन्य रोबोट बनाएंगे और उनका उपयोग करेंगे, उन्हें विभिन्न टेम्पलेट्स का उपयोग करने का अवसर मिलेगा।
![]() शिक्षक टूलबॉक्स
शिक्षक टूलबॉक्स

- प्रोजेक्ट सहेजना
ध्यान दें कि जब उन्होंने पहली बार VEXcode V5 खोला था, तो विंडो कोVEXcode प्रोजेक्टलेबल किया गया था और इसे सहेजा नहीं गया था (टूलबार पर इंगित)। जब VEXcode V5 पहली बार खुलता है तो VEXcode प्रोजेक्ट डिफ़ॉल्ट प्रोजेक्ट नाम होता है। जब परियोजना का नाम बदलकरड्राइव वेलोसिटीकर दिया जाता है और उसे सहेज दिया जाता है, तो डिस्प्ले अपडेट होकर सहेजा जाता है। टूलबार में इस विंडो का उपयोग करके, यह जांचना आसान है कि छात्र सही प्रोजेक्ट का उपयोग कर रहे हैं और यह सहेजा गया है।
एक बार जब कोई प्रोजेक्ट प्रारंभिक रूप से सहेजा जाता है, तो VEXcode V5 किसी भी बाद के परिवर्तनों को स्वचालित रूप से सहेज लेता है, जैसा कि प्रोजेक्ट नाम के आगे संदेश द्वारा इंगित किया गया है।
छात्रों को बताएं कि वे अब अपना पहला प्रोजेक्ट शुरू करने के लिए तैयार हैं। छात्रों को समझाएं कि कुछ सरल चरणों का पालन करके, वे एक प्रोजेक्ट बना और चला सकेंगे जो स्पीडबोट के ड्राइवट्रेन का वेग निर्धारित करेगा। - रुकें और चर्चा करें
यह रुकने और विद्यार्थियों से VEXcode V5 में नया प्रोजेक्ट शुरू करने के लिए व्यक्तिगत रूप से या समूहों में अभी-अभी पूरे किए गए चरणों की समीक्षा करने का एक अच्छा बिंदु है। विद्यार्थियों से कहें कि वे अपने समूह या पूरी कक्षा के साथ साझा करने से पहले व्यक्तिगत रूप से विचार करें।
चरण 3: विभिन्न वेगों पर 450 मिमी तक आगे बढ़ें
-
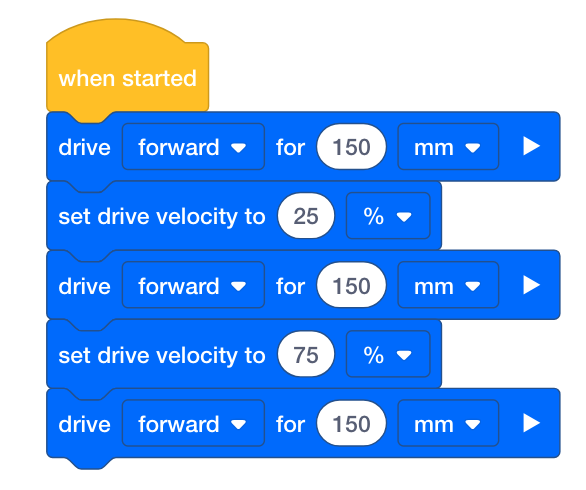
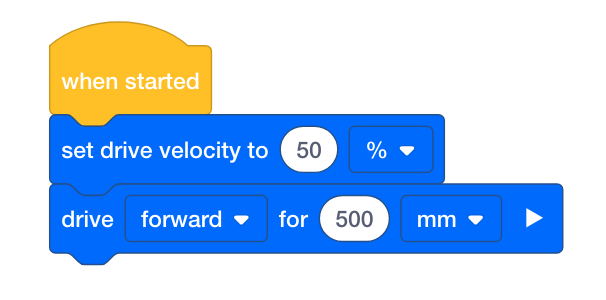
इस परियोजना को VEXcode V5 में बनाएँ।
![]() शिक्षक टूलबॉक्स
शिक्षक टूलबॉक्स
ध्यान दें कि इस स्टैक में दूसरा और तीसरा ब्लॉक चौथे और पांचवें ब्लॉक के समान हैं। तीसरा ब्लॉक जोड़ने के बाद, छात्र दूसरे ब्लॉक पर राइट-क्लिक या लॉन्ग-क्लिक कर सकता है और चौथे और पांचवें ब्लॉक को जोड़ने के लिए डुप्लिकेट चुन सकता है। फिर चौथे ब्लॉक का वेग 75% तक बदला जा सकता है।

-
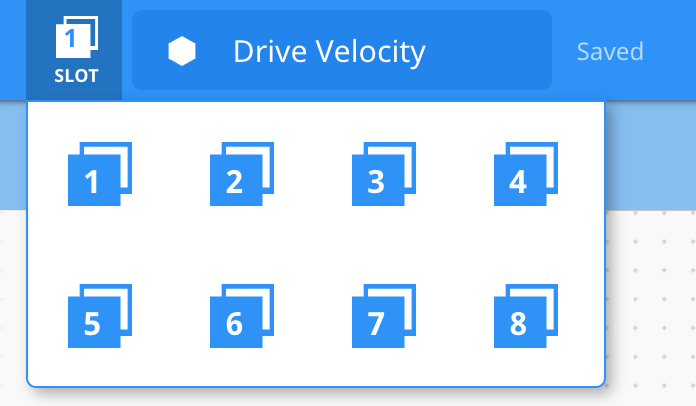
स्लॉट आइकन पर चयन करें. आप अपने प्रोजेक्ट को रोबोट ब्रेन में उपलब्ध आठ स्लॉट में से किसी एक पर डाउनलोड कर सकते हैं। स्लॉट 1 का चयन करें.
-
रोबोट को अपने कंप्यूटर या टैबलेट से कनेक्ट करें। एक बार सफल कनेक्शन हो जाने पर टूलबार में ब्रेन आइकन हरा हो जाता है।

-
फिर, रोबोट ब्रेन पर ड्राइव वेलोसिटी प्रोजेक्ट डाउनलोड करने के लिए टूलबार पर डाउनलोड बटन पर क्लिक करें।
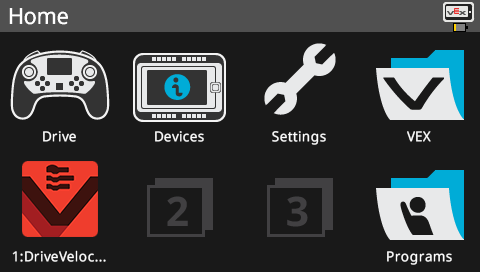
- रोबोट ब्रेन की स्क्रीन पर देखकर सुनिश्चित करें कि आपका प्रोजेक्ट स्पीडबॉट के ब्रेन में डाउनलोड हो गया है। परियोजना का नाम स्लॉट 1 में सूचीबद्ध होना चाहिए।
-
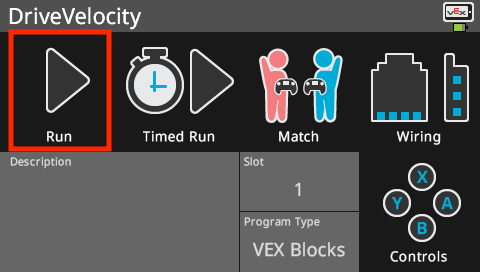
प्रोजेक्ट का चयन करके और फिर रन दबाकर स्पीडबोट रोबोट पर प्रोजेक्ट चलाएं।
![]() शिक्षक टूलबॉक्स
शिक्षक टूलबॉक्स
-
रुकें और चर्चा करें
विद्यार्थियों से यह अनुमान लगाने को कहें कि उनके विचार से जब यह प्रोजेक्ट डाउनलोड किया जाएगा और स्पीडबोट रोबोट पर चलाया जाएगा तो क्या होगा। विद्यार्थियों से कहें कि वे अपनी भविष्यवाणियाँ अपनी इंजीनियरिंग नोटबुक में लिखें। यदि समय हो तो प्रत्येक समूह से अपना पूर्वानुमान साझा करने को कहें।छात्रों को यह अनुमान लगाना चाहिए कि स्पीडबोट पहले अपने डिफ़ॉल्ट वेग (50%) पर आगे बढ़ेगा, फिर डिफ़ॉल्ट वेग से धीमी गति से (25%), और फिर डिफ़ॉल्ट वेग से तेज़ गति से (75%) आगे बढ़ेगा।
-
पहले मॉडल का विकल्प
सभी छात्रों को एक साथ प्रयास करने से पहले कक्षा के सामने प्रोजेक्ट चलाने का मॉडल बनाएं। छात्रों को एक जगह पर इकट्ठा करें और स्पीडबोट को फर्श पर रखने पर 450 मिमी तक चलने के लिए पर्याप्त जगह छोड़ दें।विद्यार्थियों से कहें कि अब उनकी परियोजना चलाने की बारी है। सुनिश्चित करें कि उनके पास स्पष्ट रास्ता हो और कोई रोबोट एक-दूसरे से न टकराए।
चरण 4: अलग-अलग वेगों पर आगे और पीछे की ओर ड्राइव करें

- ब्लॉक के लिए दूसरे ड्राइव को आगे की ओर चलाने के बजाय पीछे की ओर चलाने के लिए बदलें।
- फिरपरियोजना डाउनलोड.
- स्पीडबोट रोबोट पर प्रोजेक्ट चलाएँ।
![]() शिक्षक टूलबॉक्स
-
चरण 4 पूरा करना
शिक्षक टूलबॉक्स
-
चरण 4 पूरा करना
-
प्रोजेक्ट को पुनः सहेजने की कोई आवश्यकता नहीं है क्योंकि VEXcode V5 स्वतः सहेज लेगा।
-
[ड्राइव फॉर] ब्लॉक कोफॉरवर्डसेरिवर्समें बदलने के लिए, बस ड्रॉपडाउन मेनू पर क्लिक करें औररिवर्सचयन करें।
-
यदि छात्र कंप्यूटर का उपयोग कर रहे हैं, तो उनसे रोबोट ब्रेन से यूएसबी केबल को डिस्कनेक्ट करने के लिए कहें। किसी प्रोजेक्ट को चलाते समय रोबोट को कंप्यूटर से कनेक्ट करने पर, रोबोट कनेक्शन केबल को खींच सकता है।
-
चूंकि हम नया स्लॉट नहीं चुन रहे हैं, इसलिए नया प्रोजेक्ट स्लॉट 1 पर डाउनलोड हो जाएगा और पिछले प्रोजेक्ट को प्रतिस्थापित कर देगा।
![]() शिक्षक युक्तियाँ
शिक्षक युक्तियाँ
यदि आवश्यक हो तो टीमों से परीक्षण क्षेत्र और गेंद साझा करने के लिए कहें, लेकिन प्रत्येक टीम के पास अपनी गेंद के साथ कई परीक्षण क्षेत्र भी स्थापित किए जा सकते हैं। निर्णय लें कि क्या आप परीक्षण क्षेत्र स्थापित करना चाहते हैं या आप चाहते हैं कि छात्र ऐसा करें।
चरण 5: अपना परीक्षण क्षेत्र स्थापित करना

परीक्षण क्षेत्र लेआउट का उदाहरण
- टेप और मीटर स्टिक का उपयोग करके फर्श पर 3 मीटर की रेखा बनाएं, जैसा कि ऊपर चित्र में दिखाया गया है।
- रेखा तैयार हो जाने के बाद, टेप और मीटर स्टिक का उपयोग करके एक बार फिर 3 मीटर की रेखा के पार 1 मीटर की रेखाएं बनाएं, जैसे कि ऊपर की छवि में ऊर्ध्वाधर रेखाएं हैं। ऊर्ध्वाधर रेखा पर 0 सेमी से शुरू करके प्रत्येक 50 सेमी के निशान पर 1 मीटर की रेखा टेप करें।
- छोटी क्षैतिज रेखाएं लंबी ऊर्ध्वाधर रेखा के केंद्र में होनी चाहिए।
- जब क्षेत्र स्थापित किया जा रहा हो, तो आपकी टीम के एक या दो सदस्यों को मोमेंटमनामक एक नया प्रोजेक्ट बनाना चाहिए। वेग को 50% पर सेट करें और स्पीडबोट को 50 सेमी पर पहली पंक्ति तक आगे ले जाएं। ध्यान रखें कि 1 सेमी = 10 मिमी, इसलिए रोबोट 50 सेमी या 500 मिलीमीटर आगे की ओर यात्रा करेगा।
![]() शिक्षक टूलबॉक्स
-
यह गतिविधि क्यों?
शिक्षक टूलबॉक्स
-
यह गतिविधि क्यों?
डेटा संग्रहण और विश्लेषण, यहां तक कि सरल पैटर्न पहचान भी मौलिक विज्ञान कौशल हैं। यह गतिविधि सामान्य गलतियों को रोककर डेटा विश्लेषण में संरचना जोड़ती है। ध्यान दें कि निर्देशों में छात्रों को रोबोट की गति के साथ-साथ रोबोट की ड्राइविंग दूरी में भी परिवर्तन करने के लिए नहीं कहा गया है। यह उस बात का जानबूझकर किया गया अनुप्रयोग है जिसे सीखने वाले वैज्ञानिक चरों के नियंत्रण की रणनीति कहते हैं। नौसिखिए अन्वेषकों को एक समय में एक चर (अर्थात, इस मामले में वेग) में हेरफेर करना सिखाना, ताकि दूसरे चर (अर्थात, टक्कर के बाद गेंद द्वारा तय की गई दूरी) पर उसके प्रभाव का पता लगाया जा सके, महत्वपूर्ण है, क्योंकि यह आवश्यक नहीं है कि विद्यार्थी अनुमान और जांच वाले दृष्टिकोण के स्थान पर इसे सहज रूप से अपना लें। विशिष्ट अनुमान-और-जांच दृष्टिकोण अक्सर एक समय में एक से अधिक चर को नियंत्रित करते हैं (अर्थात, वेग और रोबोट द्वारा तय की गई दूरी दोनों को बदलते हैं) और घूर्णन के बाद गेंद द्वारा तय की गई दूरी पर संगम के प्रभाव का अवलोकन करते हैं। यह गतिविधि विद्यार्थियों को इससे दूर रखने का प्रयास करती है, क्योंकि तब चरों के बीच संबंध अस्पष्ट हो जाते हैं। क्या यह रोबोट की उच्च गति है, रोबोट द्वारा चलाई गई अधिक दूरी है, या दोनों ही हैं जो गेंद को अधिक दूरी तक ले जाते हैं? जब हम एक ही समय में दोनों चरों में हेरफेर करते हैं तो हम इसका उत्तर नहीं दे सकते।
हालाँकि, टीमें स्वतः ही रोबोट को अलग-अलग दूरियों तक ले जाने का प्रयास कर सकती हैं। यदि आप ऐसा देखते हैं, तो उनसे केवल दूरी बदलने को कहें, लेकिन वेग को वैसा ही रखें जैसा कि मूल 500 मिमी दूरी वाले परीक्षण में था। इस तरह, वे समान वेग की तुलना अलग-अलग ड्राइविंग दूरियों से कर सकते हैं, ताकि यह देखा जा सके कि रोबोट की ड्राइविंग दूरी भी गेंद की यात्रा की दूरी को प्रभावित करती है या नहीं।
चरण 6: टकराव के दौरान ऊर्जा के हस्तांतरण का परीक्षण

![]() शिक्षक युक्तियाँ
शिक्षक युक्तियाँ
-
गेंद को अलग-अलग दिशाओं में अलग-अलग दूरी तक उछालने के लिए क्षेत्र तैयार करें। आवश्यकतानुसार दरवाजे और/या खिड़कियाँ बंद कर दें।
-
वेग अन्वेषण हेतु तालिका को नीचे से सहेजा जा सकता है, या छात्र अपनी इंजीनियरिंग नोटबुक में तालिका को पुनः बना सकते हैं।
-
टीम इंजीनियरिंग नोटबुक के मूल्यांकन के लिए एक रूब्रिक यहां पाया जा सकता है (Google / .docx / .pdf), और व्यक्तिगत नोटबुक के मूल्यांकन के लिए एक रूब्रिक यहां पाया जा सकता है (Google / .docx / .pdf)। जब भी आप किसी रूब्रिक के साथ विद्यार्थियों के काम का मूल्यांकन करने की योजना बनाते हैं, तो परियोजना पर काम शुरू करने से पहले उनके साथ रूब्रिक साझा करना सुनिश्चित करें।
गेंद को 50 सेमी पर क्षैतिज रेखा पर केन्द्रित करें तथा अपने रोबोट को इस प्रकार रखें कि उसका अगला भाग 0 सेमी पर क्षैतिज रेखा पर केन्द्रित हो। सुनिश्चित करें कि रोबोट का अगला भाग गेंद की दिशा में हो। अपना पहला मोमेंटम प्रोजेक्ट चलाएं जिसमें वेग 50% पर सेट हो और रोबोट के गेंद से टकराने पर पूरा ध्यान दें।
इस डेटा तालिका (Google / .pdf) में सेट वेग, तय की गई दूरी और गेंद द्वारा तय की गई दूरी को रिकॉर्ड करें। तालिका की पहली पंक्ति आपके लिए उस मोमेंटम परियोजना के आधार पर शुरू की गई है जिस पर आपने पिछले चरण में काम किया था। जैसे-जैसे आप अलग-अलग वेग सेट करने का प्रयास करते हैं, इस तालिका में डेटा जोड़ना जारी रखें। फिर आप कक्षा के रूप में अपने निष्कर्षों पर चर्चा करते समय अन्य टीमों का डेटा भी जोड़ सकते हैं।

डेटा एकत्र करते समय अपनी इंजीनियरिंग नोटबुक में नीचे दिए गए प्रश्नों के बारे में सोचें और उनका उत्तर दें:
- आप कैसे बता सकते हैं कि टक्कर के दौरान रोबोट के संवेग ने गेंद को ऊर्जा हस्तांतरित की? विस्तार से समझाएं।
- परीक्षण को कम से कम दो बार और दोहराएं। 50% से कम वेग का प्रयास करें। गेंद को उसकी स्थिति में पुनः स्थापित करें और तालिका में दर्ज करें कि गेंद कितनी दूरी तक गई। इसके अलावा, 50% से अधिक वेग का प्रयास करें। गेंद को उसकी स्थिति में पुनः स्थापित करें और तालिका में दर्ज करें कि गेंद कितनी दूरी तक गई।
- जब सभी समूह अपने तीन परीक्षण पूरे कर लें, तो अन्य समूहों द्वारा चुने गए वेगों तथा उनके परीक्षणों में गेंद द्वारा तय की गई दूरी पर चर्चा करें। जैसे ही टीमें अपना डेटा साझा करती हैं, उनके निष्कर्षों को अपनी तालिका में जोड़ें।
- डेटा में पैटर्न देखें। क्या निर्धारित वेग बढ़ने पर गेंद द्वारा तय की गई दूरी बढ़ती है या घटती है?
![]() शिक्षक टूलबॉक्स
-
उत्तर
शिक्षक टूलबॉक्स
-
उत्तर
-
गेंद की गति इस बात का प्रमाण है कि टक्कर के दौरान रोबोट ने ऊर्जा स्थानांतरित की। छात्र प्रभाव के बाद गेंद की गति या उसकी यात्रा की दिशा को भी साक्ष्य के रूप में बता सकते हैं।
-
गेंद द्वारा तय की गई दूरी प्रयुक्त गेंद के द्रव्यमान/भार तथा रोबोट के लिए निर्धारित वेग पर निर्भर करती है।
-
विद्यार्थियों को यह समझना चाहिए कि उच्च वेग से गेंद कम वेग की तुलना में अधिक दूरी तक जाती है। इसे स्पष्ट रूप से रोबोट की गति से जोड़ें। इस बात पर प्रकाश डालें कि रोबोट का वजन नहीं बदला है, केवल उसका वेग बदला है, लेकिन दोनों रोबोट की गति में योगदान करते हैं। उनसे पूछें कि क्या उन्हें लगता है कि यदि रोबोट भारी होता तो गेंद इतनी ही दूर तक जाती। संभवतः ऐसा होगा। अगले भाग में टक्कर के दौरान गेंद के द्रव्यमान के प्रभाव के बारे में अधिक जानकारी दी गई है।
-
छात्र समूहों ने व्यापक रूप से परिवर्तनशील वेगों का चयन किया होगा, लेकिन समग्र शिक्षण उद्देश्य यह है कि छात्र यह पहचानें कि उच्च वेग से अधिक संवेग उत्पन्न होता है, जो टकराव के दौरान गेंद को अधिक ऊर्जा स्थानांतरित करता है।