
Menjelajahi Kecepatan - Berbasis Blok
 Kotak Peralatan Guru
Kotak Peralatan Guru
-
Garis Besar Aktivitas
Eksplorasi ini pertama-tama akan memperkenalkan siswa pada pengaturan kecepatan saat mengemudi dan kemudian meminta mereka untuk mengeksplorasi bagaimana kecepatan robot memengaruhi momentumnya. Klik di sini (Google / .docx / .pdf) untuk garis besar kegiatan ini. Memahami momentum robot akan menjadi konsep penting untuk diterapkan pada permainan bowling Strike Challenge. -
Apa yang Akan Diprogramkan Siswa
Menggunakan proyek templat Speedbot (Drivetrain 2-motor, Tanpa Gyro) memungkinkan siswa untuk mengubah pengaturan kecepatan blok [Drive for] hanya dengan menambahkan blok [Set drive velocity] ke tumpukan. Bagian kegiatan yang dipandu meminta siswa bekerja dengan blok [Tetapkan kecepatan gerak] dan di akhir kegiatan meminta mereka menerapkan keterampilan pemrograman kecepatan untuk menguji momentum dan perpindahan energi.
Speedbot siap melaju dengan kecepatan berbeda!
Investigasi ini akan membantu Anda mempelajari lebih lanjut tentang pemrograman Speedbot untuk melaju pada kecepatan yang paling sesuai untuk tugas tersebut. Dalam Tantangan Strike di akhir, Anda perlu menemukan kecepatan untuk Speedbot yang memungkinkannya bergerak cepat dan memiliki momentum yang baik, tetapi tetap terkendali agar dapat memukul bola pada sudut yang tepat dan dengan kekuatan yang besar.
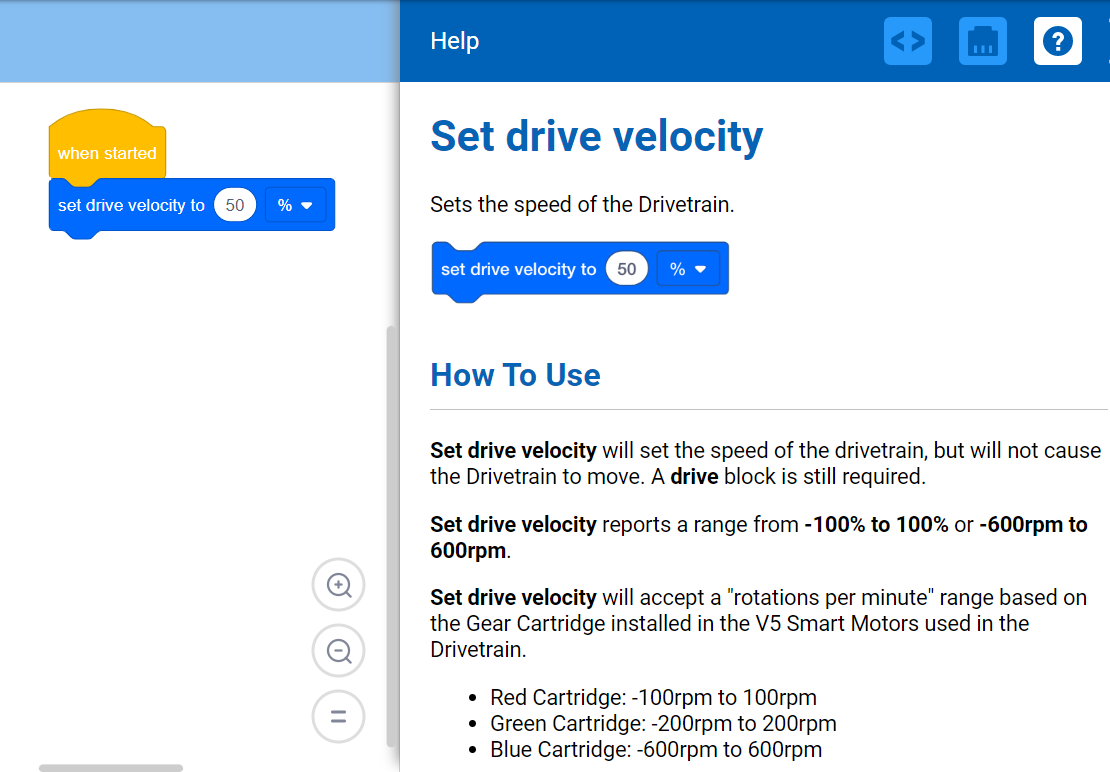
VEXcode V5 yang akan digunakan di bagian pertama investigasi ini:

 Tips Guru
Tips Guru
Jika ini adalah pertama kalinya siswa menggunakan VEXcode V5, mereka dapat merujuk Tutorial kapan saja selama eksplorasi ini. Tutorial ada di bilah alat.

Untuk mengetahui informasi lebih lanjut tentang blok tersebut, bukadan kemudian pilih blok yang ingin Anda baca.
Setiap kelompok siswa harus mendapatkan perangkat keras yang dibutuhkan dan buku catatan teknik kelompok. Lalu buka VEXcode V5.
| Kuantitas | Bahan-bahan yang Dibutuhkan |
|---|---|
| 1 |
Robot Speedbot |
| 1 |
Baterai Robot Terisi |
| 1 |
Kode VEX V5 |
| 1 |
Kabel USB (jika menggunakan komputer) |
| 1 |
Buku Catatan Teknik |
| 1 |
Bola (ukuran dan bentuk bola sepak) |
| 1 |
Ruang kosong berukuran 3m x 3m |
| 1 |
Tongkat meteran atau penggaris |
| 1 |
Gulungan pita |
| 1 |
Tabel data |
Tips Guru
-
Modelkan setiap langkah untuk memeriksa apakah Speedbot sudah siap sehingga siswa akan terbiasa melakukannya.
Langkah 1: Persiapan Eksplorasi
Mempersiapkan Eksplorasi
Sebelum Anda memulai kegiatan, apakah Anda sudah menyiapkan masing-masing barang ini?
-
Apakah semua motor terpasang pada port yang benar?
-
Apakah kabel pintardimasukkan sepenuhnyake semua motor?
-
Apakah Otakdihidupkan?
-
Apakah bateraiterisi?
Langkah 2: Mulai Proyek Baru
Sebelum Anda memulai proyek Anda, pilih proyek Speedbot (Drivetrain 2-motor, Tanpa Gyro) - Template. Proyek templat berisi konfigurasi motor Speedbot. Jika templat tidak digunakan, robot Anda tidak akan menjalankan proyek dengan benar.
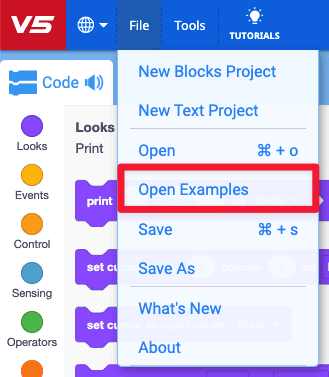
- Buka menu File.
- PilihBukaContoh.
- Pilih dan buka proyek templatSpeedbot (Drivetrain 2-motor, Tanpa Gyro).
- Ubah nama proyek AndaDrive Velocitykarena kita akan menggunakan blok [Set drive velocity].
- Simpan proyek Anda.
-
Untuk bantuan dalam menyimpan proyek, tinjau Tutorial di dalam VEXcode V5.

-
-
Periksa untuk memastikan nama proyekDrive Velocitysekarang ada di jendela di tengah bilah alat.

Tips Guru
-
Pastikan siswa telah memilih proyek templat Speedbot (Drivetrain 2-motor, Tanpa Gyro).
-
Anda dapat menunjukkan kepada siswa bahwa ada beberapa templat untuk dipilih pada halamanContoh. Saat mereka membangun dan menggunakan robot lain, mereka akan memiliki kesempatan untuk menggunakan templat yang berbeda.
Kotak Peralatan Guru

- Menyimpan Proyek
Tunjukkan bahwa ketika mereka pertama kali membuka VEXcode V5, jendelanya diberi labelProyek VEXcodedan tidak disimpan (ditunjukkan pada bilah alat). Proyek VEXcode adalah nama proyek default saat VEXcode V5 pertama kali dibuka. Setelah proyek diubah namanya menjadiDrive Velocitydan disimpan, tampilan akan diperbarui menjadi Tersimpan. Dengan menggunakan jendela ini di bilah alat, mudah untuk memeriksa apakah siswa menggunakan proyek yang benar dan proyek tersebut telah disimpan.
Setelah proyek awalnya disimpan, VEXcode V5 secara otomatis menyimpan setiap perubahan berikutnya, seperti yang ditunjukkan oleh pesan di samping nama proyek.
Beri tahu siswa bahwa mereka sekarang siap untuk memulai proyek pertama mereka. Jelaskan kepada siswa bahwa dengan mengikuti beberapa langkah sederhana, mereka akan dapat membuat dan menjalankan proyek yang akan mengatur kecepatan drivetrain Speedbot. - Berhenti dan Diskusikan
Ini adalah saat yang tepat untuk berhenti sejenak dan meminta siswa meninjau kembali langkah-langkah yang baru saja diselesaikan dalam memulai proyek baru di VEXcode V5 secara individu atau kelompok. Mintalah siswa untuk melakukan refleksi secara individu sebelum membagikannya dalam kelompok atau ke seluruh kelas.
Langkah 3: Berkendara Maju sejauh 450 mm dengan Kecepatan Berbeda
-
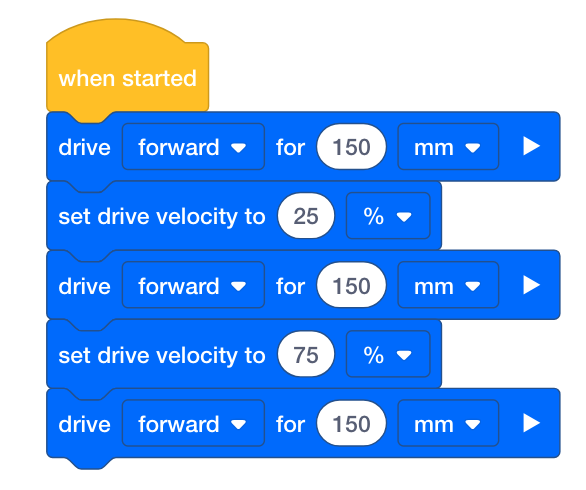
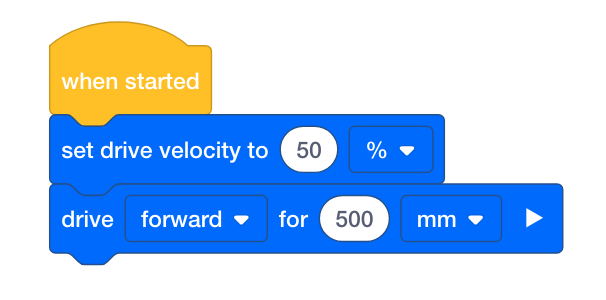
Bangun proyek ini dalam VEXcode V5.
Kotak Peralatan Guru
Perhatikan bahwa dalam tumpukan ini blok kedua dan ketiga sama dengan blok keempat dan kelima. Setelah menambahkan blok ketiga, siswa dapat mengklik kanan atau lama pada blok kedua dan memilih Duplikat untuk menambahkan blok keempat dan kelima. Kemudian kecepatan balok keempat dapat diubah menjadi 75%.

-
Pilih pada ikon Slot. Anda dapat mengunduh proyek Anda ke salah satu dari delapan slot yang tersedia di Robot Brain. Pilih slot 1.
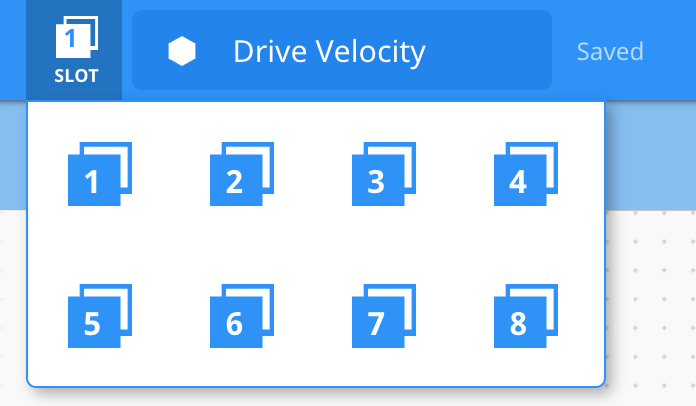
-
Hubungkan robot ke komputer atau tablet Anda. Ikon Otak pada bilah alat berubah menjadi hijau setelah koneksi berhasil dibuat.

-
Kemudian, klik tombol Unduh pada bilah alat untuk mengunduh proyek Drive Velocity ke Robot Brain.

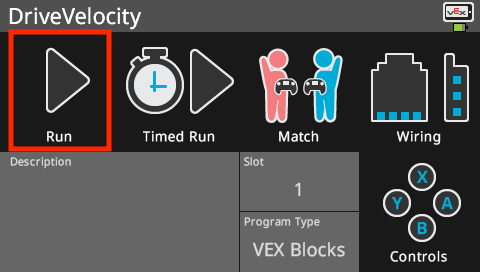
- Periksa untuk memastikan proyek Anda telah diunduh ke Otak Speedbot dengan melihat layar Otak Robot. Nama proyek harus dicantumkan di Slot 1.
-
Jalankan proyek pada robot Speedbot dengan memilih proyek lalu menekan Jalankan.
Kotak Peralatan Guru
-
Berhenti dan Diskusikan
Minta siswa untuk memprediksi apa yang menurut mereka akan terjadi ketika proyek ini diunduh dan dijalankan pada robot Speedbot. Mintalah siswa untuk mencatat prediksi mereka di buku catatan teknik mereka. Jika waktu memungkinkan, mintalah setiap kelompok untuk berbagi prediksi mereka.Siswa harus memperkirakan bahwa Speedbot akan bergerak maju terlebih dahulu pada kecepatan default-nya (50%), kemudian lebih lambat (25%) dari kecepatan default, dan kemudian lebih cepat (75%) dari kecepatan default.
-
Pilihan untuk Menjadi Model Pertama
Modelkan menjalankan proyek di depan kelas sebelum meminta semua siswa mencobanya sekaligus. Kumpulkan siswa di satu area dan sisakan ruang yang cukup bagi Speedbot untuk bergerak 450 mm jika diletakkan di lantai.Beritahukan siswa bahwa sekarang giliran mereka untuk menjalankan proyek mereka. Pastikan mereka memiliki jalur yang jelas dan tidak ada robot yang bertabrakan satu sama lain.
Langkah 4: Berkendara Maju dan Mundur dengan Kecepatan Berbeda

- Ubah drive kedua untuk blok agar bergerak mundur, bukan maju.
- Laluunduhproyek.
- Jalankan proyek pada robot Speedbot.
Kotak Alat Guru
-
Menyelesaikan Langkah 4
-
Tidak perlu menyimpan proyek lagi karena VEXcode V5 akan menyimpan otomatis.
-
Untuk mengubah blok [Drive for] darimajukemundur, cukup klik menu tarik-turun dan pilihmundur.
-
Jika siswa menggunakan komputer, minta mereka untuk melepaskan kabel USB dari Robot Brain. Menghubungkan robot ke komputer saat menjalankan proyek dapat menyebabkan robot menarik kabel koneksi.
-
Karena kami tidak memilih slot baru, proyek baru akan diunduh ke Slot 1 dan menggantikan proyek sebelumnya.
Tips Guru
Minta tim untuk berbagi area pengujian dan bola jika perlu, tetapi beberapa area pengujian yang masing-masing memiliki bola sendiri juga dapat disiapkan. Putuskan apakah Anda ingin menyiapkan area pengujian atau Anda ingin siswa yang melakukannya.
Langkah 5: Menyiapkan Area Pengujian Anda

Contoh tata letak area pengujian
- Gunakan selotip dan meteran untuk membuat garis sepanjang 3m di lantai seperti garis horizontal yang ditunjukkan pada gambar di atas.
- Setelah garis dibuat, gunakan selotip dan meteran sekali lagi untuk membuat garis sepanjang 1m melintasi garis 3m seperti garis vertikal pada gambar di atas. Beri pita pada garis vertikal setiap 50 cm dengan memulai dari 0 cm dan beri pita sepanjang 1 meter.
- Garis horizontal yang lebih pendek harus dipusatkan pada garis vertikal yang lebih panjang.
- Sementara area sedang disiapkan, satu atau dua anggota tim Anda harus membuat proyek baru bernama Momentum. Atur kecepatan pada 50% dan minta Speedbot melaju maju ke garis pertama pada jarak 50 cm. Ingatlah 1 cm = 10 mm, jadi robot akan bergerak maju sejauh 50 cm atau 500 milimeter.
Kotak Peralatan Guru
-
Mengapa kegiatan ini?
Pengumpulan dan analisis data, bahkan pengenalan pola sederhana, adalah keterampilan sains yang mendasar. Aktivitas ini menambahkan struktur pada analisis data tersebut dengan mencegah kesalahan umum. Perhatikan bahwa instruksi tidak memberi tahu siswa untuk mengubah jarak tempuh robot sekaligus mengubah kecepatan robot. Ini adalah penerapan yang disengaja dari apa yang oleh para ilmuwan pembelajaran disebut Strategi Pengendalian Variabel. Mengajarkan penyelidik pemula untuk memanipulasi satu variabel pada satu waktu (misalnya, kecepatan dalam kasus ini) untuk menentukan pengaruhnya pada variabel kedua (misalnya, jarak yang ditempuh bola setelah tumbukan) adalah penting karena pendekatan ini belum tentu akan diadopsi siswa secara spontan dibandingkan dengan pendekatan tebak-dan-periksa. Pendekatan tebak-tebakan yang umum sering kali memanipulasi lebih dari satu variabel pada satu waktu (misalnya, mengubah kecepatan dan jarak yang ditempuh robot) dan mengamati dampak pertemuan tersebut pada jarak yang ditempuh bola setelah rotasi. Kegiatan ini mencoba membimbing siswa menjauh dari hal itu karena hubungan antara variabel kemudian menjadi ambigu. Apakah kecepatan robot yang lebih tinggi, jarak tempuh robot yang lebih jauh, atau keduanya yang menyebabkan bola melaju lebih jauh? Kita tidak dapat menjawabnya jika kita memanipulasi kedua variabel secara bersamaan.
Namun, tim mungkin secara spontan mencoba mengendarai robot pada jarak yang berbeda. Jika Anda mengamati hal ini, mintalah mereka untuk hanya mengubah jarak tetapi pertahankan kecepatan yang sama seperti pada percobaan dengan jarak awal 500 mm. Dengan cara itu, mereka dapat membandingkan kecepatan yang sama dengan jarak tempuh yang berbeda untuk melihat apakah jarak tempuh robot juga menjadi faktor dalam seberapa jauh bola melaju.
Langkah 6: Menguji Transfer Energi selama Tabrakan

Tips Guru
-
Siapkan area agar bola memantul ke berbagai arah dan jarak. Tutup pintu dan/atau jendela sesuai kebutuhan.
-
Tabel untuk Menjelajahi Kecepatan dapat disimpan di bawah, atau siswa dapat membuat ulang tabel tersebut di buku catatan teknik mereka.
-
Rubrik untuk mengevaluasi buku catatan teknik tim dapat ditemukan di sini (Google / .docx / .pdf), dan rubrik untuk mengevaluasi buku catatan individual dapat ditemukan di sini (Google / .docx / .pdf). Kapan pun Anda berencana mengevaluasi pekerjaan siswa dengan rubrik, pastikan untuk membagikan rubrik tersebut kepada mereka sebelum mereka mulai mengerjakan proyek.
Pusatkan bola pada garis horizontal pada jarak 50 cm dan tempatkan robot Anda sehingga bagian depannya terpusat pada garis horizontal pada jarak 0 cm. Pastikan bagian depan robot menghadap arah bola. Jalankan proyek Momentum pertama Anda dengan kecepatan yang ditetapkan sebesar 50% dan perhatikan dengan saksama saat robot bertabrakan dengan bola.
Catat kecepatan yang ditetapkan, jarak yang ditempuh, dan jarak yang ditempuh bola dalam Tabel Data ini (Google / .pdf). Baris pertama tabel telah dimulai untuk Anda berdasarkan proyek Momentum yang Anda kerjakan pada langkah sebelumnya. Teruskan menambahkan data ke tabel ini saat Anda mencoba mengatur kecepatan yang berbeda. Anda kemudian dapat menambahkan data tim lain saat Anda membahas temuan Anda bersama kelas.

Pikirkan dan jawablah pertanyaan-pertanyaan di bawah ini di buku catatan teknik Anda saat Anda mengumpulkan data:
- Bagaimana Anda tahu bahwa momentum robot mentransfer energi ke bola selama tumbukan? Jelaskan dengan rinci.
- Ulangi pengujian setidaknya dua kali lagi. Cobalah kecepatan kurang dari 50%. Letakkan kembali bola pada posisinya dan catat dalam tabel seberapa jauh bola melaju. Cobalah juga kecepatan lebih dari 50%. Letakkan kembali bola pada posisinya dan catat dalam tabel seberapa jauh bola melaju.
- Ketika semua kelompok telah menyelesaikan tiga pengujiannya, diskusikan kecepatan yang dipilih kelompok lain dan seberapa jauh bola melaju dalam pengujian mereka. Saat tim berbagi datanya, tambahkan temuan mereka ke tabel Anda.
- Cari pola dalam data. Apakah jarak yang ditempuh bola bertambah atau berkurang seiring bertambahnya kecepatan yang ditetapkan?
Kotak Alat Guru
-
Jawaban
-
Pergerakan bola merupakan bukti bahwa robot mentransfer energi selama tabrakan. Siswa juga dapat menggambarkan kecepatan bola setelah benturan atau arah pergerakannya sebagai bukti.
-
Jarak yang ditempuh bola bergantung pada massa/berat bola yang digunakan dan kecepatan yang ditetapkan untuk robot.
-
Siswa harus menyadari bahwa kecepatan yang lebih tinggi membuat bola melaju lebih jauh daripada kecepatan yang lebih rendah. Hubungkan ini secara eksplisit dengan momentum robot. Soroti bahwa berat robot tidak berubah, hanya kecepatannya tetapi keduanya berkontribusi terhadap momentum robot. Tanyakan kepada mereka apakah menurut mereka bola akan melaju sejauh itu jika robotnya lebih berat. Mungkin begitulah adanya. Ada informasi lebih lanjut mengenai pengaruh massa bola selama tumbukan pada bacaan berikutnya.
-
Kelompok siswa mungkin telah memilih kecepatan yang sangat bervariasi, tetapi tujuan pembelajaran secara keseluruhan adalah agar siswa menyadari bahwa kecepatan yang lebih tinggi menghasilkan momentum yang lebih besar yang mentransfer lebih banyak energi ke bola selama tumbukan.