
In der vorherigen Lektion haben Sie die Koordinaten verschiedener Standorte auf der CTE-Kachel geschätzt. Jetzt sammeln Sie bestimmte (x, y, z) Koordinaten in VEXcode EXP.
In dieser Lektion lernen Sie, wie Sie den Teach-Anhänger verwenden, um:
- Manuelle Bewegung aktivieren.
- Sammeln Sie (x, y, z) Koordinaten.
Am Ende dieser Lektion verwenden Sie diese Fähigkeiten in der Aktivität, um Ihren 6-Achsen-Arm manuell zu bewegen, um die (x, y, z) -Koordinaten von drei Kachelpositionen zu finden.
Verwenden des Teach-Anhängers zum Sammeln von Koordinaten
Das Teach-Pendant in VEXcode EXP ist eine Schnittstelle, mit der die Bewegung des 6-Achsen-Arms gesteuert werden kann, ohne dass eine Codierung erforderlich ist. Dieses Gerät ist sowohl für das Sammeln von Informationen, die zum genauen Codieren des 6-Achsen-Arms benötigt werden, als auch für das Verständnis seiner Bewegungen unerlässlich.
Manuelle Bewegung aktivieren
Manuelle Bewegung ist, wenn Sie den 6-Achsen-Arm physisch von Hand bewegen.
Wichtig: Der 6-Achsen-Arm sollte nur von Hand bewegt werden, nachdem die manuelle Bewegung im Programmierhandgerät in VEXcode EXP aktiviert wurde. Der Versuch, den 6-Achsen-Arm von Hand zu bewegen, ohne dass eine manuelle Bewegung aktiviert ist, kann den 6-Achsen-Arm beschädigen.
Befolgen Sie die folgenden Schritte, um den Teach-Anhänger zu öffnen und die manuelle Bewegung für Ihren 6-Achsen-Arm zu aktivieren.
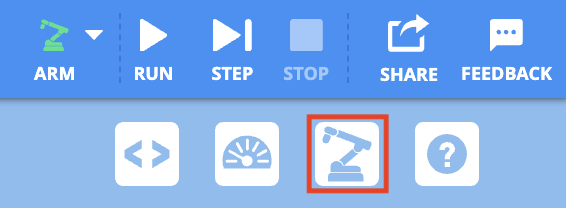
Wählen Sie das Teach-Pendant-Symbol, um es zu öffnen. Stellen Sie sicher, dass der 6-Achsen-Arm mit dem VEXcode verbunden ist.
Hinweis: Sie werden aufgefordert, den 6-Achsen-Arm anzuschließen, um das Programmierhandgerät zu verwenden, wenn der 6-Achsen-Arm nicht bereits angeschlossen ist.
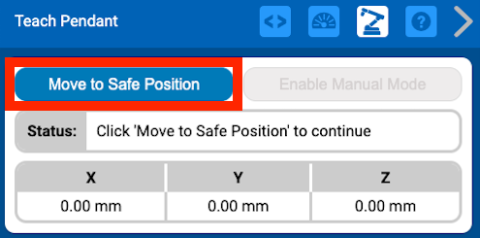
Wählen Sie In sichere Position bewegen , um mit der Verwendung des Programmierhandgeräts zu beginnen.
Dies bewegt den 6-Achsen-Arm in eine konsistente "sichere" Position bei ungefähr (120, 0, 100). Nach der Auswahl werden die Funktionen des Programmierhandgeräts aktiviert.
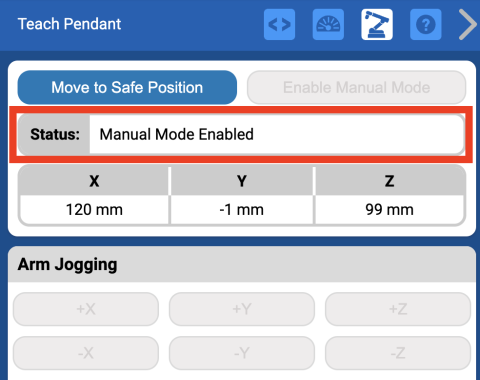
Aktivieren Sie die manuelle Bewegung, indem Sie Manuellen Modus aktivieren auswählen.
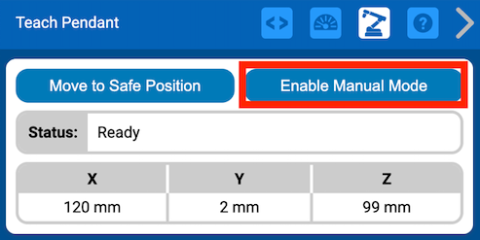
Im manuellen Modus zeigt die Statusleiste des Programmierhandgeräts "Manueller Modus aktiviert" an und die Jogging-Funktion wird deaktiviert.
Sammeln Sie (x, y, z) -Koordinaten
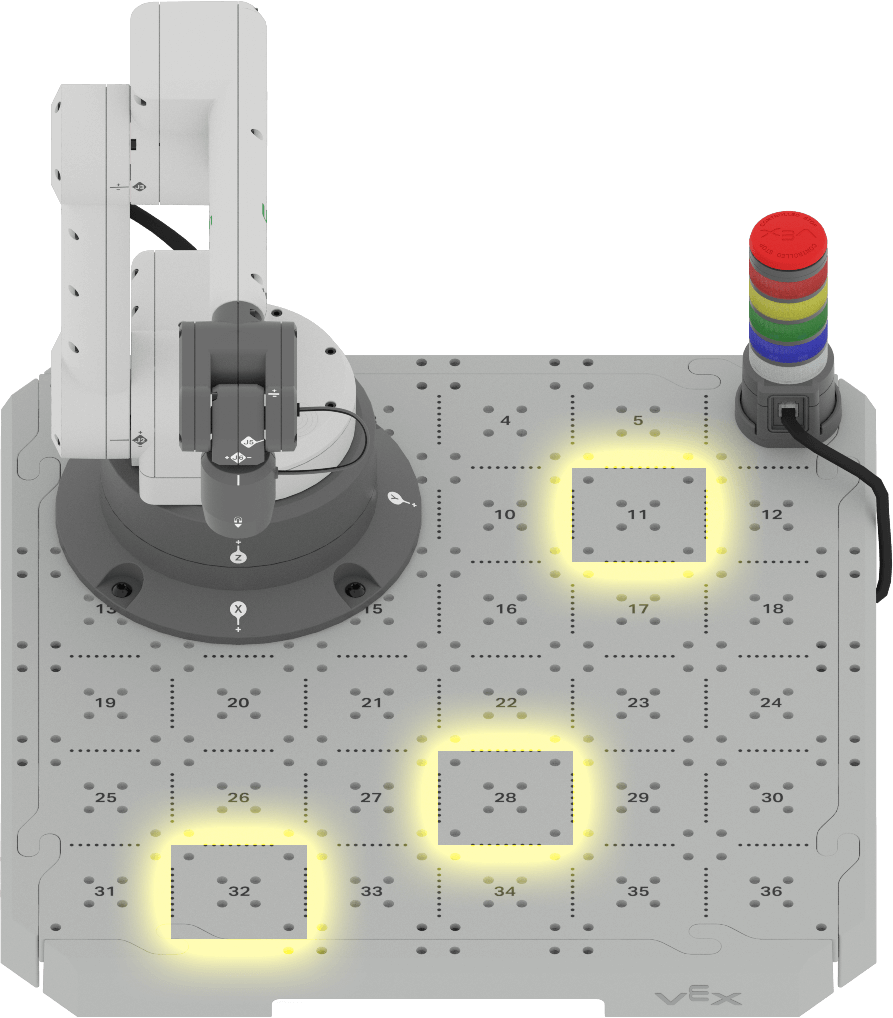
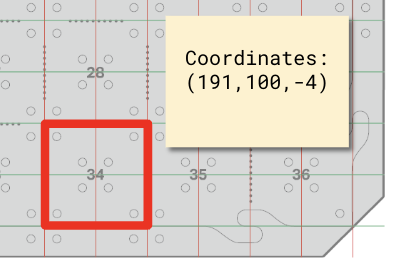
Sobald die manuelle Bewegung aktiviert ist, können (x, y, z) -Koordinaten erfasst werden, indem der 6-Achsen-Arm physisch an die gewünschte Stelle bewegt wird. Befolgen Sie die folgenden Schritte, um die Koordinate der Kachelposition 34 zu erfassen.
Bewegen Sie das Ende des 6-Achsenarms physisch so, dass das Magnetaufnahmewerkzeug die Kachelposition 34 berührt.
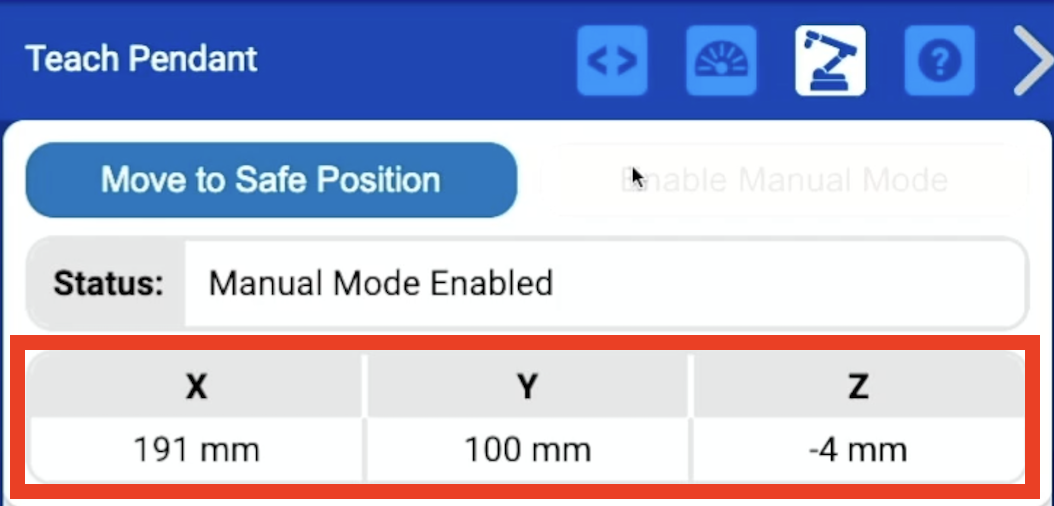
Die (x, y, z) -Koordinaten werden auf dem Teach Pendant Dashboard angezeigt. Diese werden in Echtzeit aktualisiert, wenn sich der 6-Achsen-Arm bewegt (wie im Video oben gezeigt).
Notieren Sie die (x, y, z) -Koordinaten der Kachelposition 34 in Ihrem technischen Notizbuch.
Aktivität
Nachdem Sie nun gelernt haben, den 6-Achsen-Arm manuell zu bewegen, üben Sie, die Koordinaten mehrerer Kachelpositionen aufzuzeichnen. Sie sammeln und zeichnen die Koordinaten derselben Kachelpositionen auf, die Sie in der vorherigen Lektion geschätzt haben. Stellen Sie sicher, dass diese Kostenvoranschläge verfügbar sind, wenn Sie diese Aktivität abschließen.
- Bewegen Sie den 6-Achsen-Arm manuell und notieren Sie die (x, y, z) -Koordinaten der
folgenden Kachelpositionen in Ihrem technischen Notizbuch:
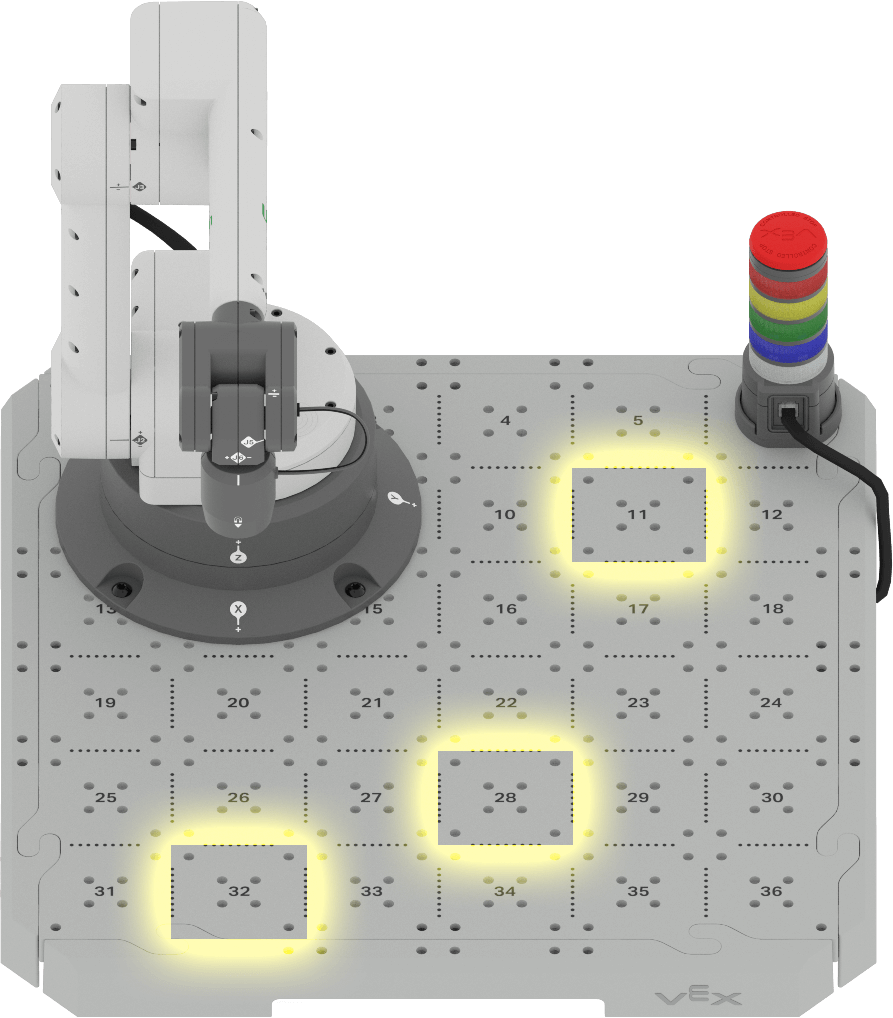
- Kachelposition 11
- Kachelposition 32
- Kachelposition 28
- Vergleichen Sie Ihre gesammelten Koordinaten mit Ihren Schätzungen derselben Kachelstandorte in der vorherigen Lektion in Ihrem technischen Notizbuch. Wie nahe waren Ihre Schätzungen?
Überprüfe dein Verständnis
Bevor Sie mit der nächsten Lektion beginnen, stellen Sie sicher, dass Sie die Konzepte in dieser Lektion verstehen, indem Sie die Fragen im folgenden Dokument in Ihrem technischen Notizbuch beantworten.
Fragen zum Verständnis prüfen > (Google Doc / .docx / .pdf)
Wählen Sie Weiter > , um Ihre Fähigkeiten in der Putting It All Together-Aktivität zu kombinieren.